

Разработка и исследование методики обработки и классификации трехмерных данных лазерного сканирования
На правах рукописи
Горькавый Илья Николаевич
РАЗРАБОТКА И ИССЛЕДОВАНИЕ МЕТОДИКИ
ОБРАБОТКИ И КЛАССИФИКАЦИИ ТРЕХМЕРНЫХ ДАННЫХ ЛАЗЕРНОГО СКАНИРОВАНИЯ
Специальность 25.00.32 – Геодезия
АВТОРЕФЕРАТ
диссертации на соискание учёной степени
кандидата технических наук
Москва – 2011
Работа выполнена на кафедре геодезии Московского государственного университета геодезии и картографии (МИИГАиК).
Научный руководитель: доктор технических наук,
профессор
Сухомлин Владимир Александрович.
Официальные оппоненты: доктор технических наук,
профессор
Клюшин Евгений Борисович
(МИИГАиК);
кандидат технических наук,
доцент
Комиссаров Александр Владимирович
(СГГА, г. Новосибирск).
Ведущая организация: Государственный Университет
по Землеустройству (ГУЗ).
Защита диссертации состоится “ __ ” ________ 2011 г. в 10 часов на заседании диссертационного совета Д.212.143.03 в Московском государственном университете геодезии и картографии по адресу: 105064, Москва, К-64, Гороховский пер. 4, МИИГАиК, зал заседаний Ученого совета.
С диссертацией можно ознакомиться в библиотеке Московского государственного университета геодезии и картографии.
Автореферат разослан “______”_____________________2011 г.
Ученый секретарь
диссертационного совета Климков Ю.М.
Общая характеристика работы
Актуальность темы. Авиационные лидары позволяют получать трёхмерные координаты сотен миллионов точек земной поверхности. Нетривиальной задачей обработки лидарных данных для генерации высокоточных цифровых моделей рельефа (ЦМР, Digital Terrain Model) является автоматическая классификация отражений лазерного луча на отражения от земли и от зданий и растительности. Эта математическая и алгоритмическая проблема до сих пор не решена с нужной точностью. Отсюда следует практическая и тоже нерешенная оптимальным образом задача: результат автоматический обработки нужно быстро визуализировать и, при обнаружении ошибок классификации, исправить.
Производители лидарных систем (Leica, Optech) предоставляют программы для обработки данных, но эти программы несовершенны по результативности; они созданы не в России, а за рубежом, и их математическое и алгоритмическое наполнение обычно не раскрывается. Такие программные пакеты не позволяют гибко подходить к решению новых задач, например, организации обработки лидарных данных вместе с многоспектральными изображениями, или перенастройки алгоритмов на классификацию радарных отражений.
Для решения описанных проблем автором предложен более эффективный математический метод классификации лидарных данных, а также гибкая архитектура программного комплекса. Предложенный метод, основанный на адаптивном анализе наклонов поверхности, позволяет избежать наиболее серьезных проблем предшествующих методов и повышает точность классификации, при этом его производительность позволяет обрабатывать данные в потоковом режиме. В работе детально описаны математические методы и алгоритмы, которые лежат в основе созданных программ, что позволяет самостоятельно реализовать аналогичный комплекс, максимально адаптированный под решаемые задачи.
При автоматизации решения задач обработки используются схожие алгоритмы распознавания и классификации объектов, фильтрации дефектов, интерполяции и триангуляции поверхностей, преобразования координатных систем. Автор предлагает вариант создания базовой архитектуры комплексов по обработке 3D данных, которая позволяет оперативно составлять новую комбинацию из имеющихся программных модулей, необходимых для решения широкого спектра задач обработки.
В России существуют хорошо известные школы фотограмметрии (например, в МИИГАиК), которые используют высокоэффективные методы построения трёхмерных моделей земной поверхности по аэрофотосъёмке. Математические методы обработки лидарных данных, которые представляют собой неравномерное трёхмерное облако точек, еще не достигли совершенства методов, развитых в фотограмметрии.
Важной особенностью предложенного автором решения для обработки лидарных данных является то, что в процессе обработки трёхмерное облако точек лидарных отражений редуцируется до трех наиболее информативных двумерных матриц, к которым могут применяться эффективные алгоритмы и решения, накопленные в фотограмметрии.
Цель и задачи. Разработка и исследование методики обработки и классификации трехмерных данных лазерного сканирования. Для достижения этой цели в работе решались следующие задачи:
- Анализ требований к методикам обработки лидарных данных; создание новых математических методов и алгоритмов обработки и классификации трехмерных данных лазерного сканирования.
- Разработка и построение эффективной модели представления данных.
- Создание принципиальной схемы обработки данных.
- Создание программ для обработки лидарных данных, включая визуализацию результата и средства интерактивной коррекции, исследование их эффективности.
- Внедрение в практику разработанной методики обработки и анализ результатов её использования.
Научная новизна работы. Автором создана и реализована новая методика обработки и классификации трехмерных геодезических данных лазерного сканирования, при этом:
- Предложен новый математический метод классификации данных лазерного сканирования, основанный на адаптивном анализе наклонов поверхности, а также алгоритм его реализации. Метод позволяет выделять точки, не принадлежащие земному рельефу, и отличается высокой производительностью и эффективностью.
- Построена новая модель представления трехмерных топографических данных, позволяющая преобразовать их в набор плоских матриц и, тем самым, использовать для обработки 3D данных математические методы и алгоритмы, ранее разработанные для 2D изображений.
- Предложен технологичный подход к созданию программных комплексов на основе использования базовой архитектуры из трех компонент – универсального системного ядра, функционального (алгоритмического) ядра и интерактивного ядра, а также разработана детальная спецификация этих компонент.
- Разработан ряд эффективных алгоритмических решений, обеспечивающих функциональную полноту созданного автором комплекса программ, включая трёхмерную визуализацию и коррекцию результатов.
- Создан автоматизированный комплекс (программных) средств АКС-ЛИДАР для получения инфракрасных изображений высокого разрешения и комплекс АКС-ЛИДАР-3D для генерации точной цифровой модели рельефа (ЦМР). Тестирование показало значительные преимущества разработанных методики и программ по сравнению с другими средствами обработки.
Практическая ценность работы. Разработка и реализация методов для обработки данных лидарной топографической съемки – новой и бурно развивающейся технологии трехмерных изображений – является весьма актуальной задачей. Улучшение точности цифровой трехмерной модели рельефа имеет большое практическое значение для топографии, гравиметрии, геоморфологии, моделирования наводнений, оползней и других физических процессов на рельефе.
Методика и программы, разработанные автором, прошли тестирование при получении инфракрасных изображений и трехмерных моделей рельефа с точностью высот 9-14 сантиметров для 20 тысяч кв. километров земной поверхности, сканированной самолетным лидаром с высоты около километра (акт внедрения ФГУП «Уралгеоинформ» от 10.08.2011).
Методы исследования. В диссертации применялись методы математического и численного моделирования, а также методы статистического анализа для определения точности полученных трехмерных моделей.
Апробация работы. Работа была доложена и обсуждена на:
- 1-й международ. научно-практ. конф. «Современные информационные технологии и ИТ-образование» (МГУ, 19-23 сентября 2005);
- 2-й международ. научно-практ. конф. «Современные информационные технологии и ИТ-образование» (МГУ, 18-21 декабря 2006);
- научном семинаре в МИИГАиК (21 декабря 2006, Москва);
- 3-й международ. научно-практ. конф. «Современные информационные технологии и ИТ-образование» (МГУ, 8-11 декабря 2008);
- научном семинаре в НИВЦ МГУ (19 февраля 2009);
- научном семинаре кафедры АСВК ВМиК МГУ (17 сентября 2009);
- научном семинаре в МИИГАиК (8 декабря 2010, Москва).
Cодержание и результаты диссертационной работы освещены в 7 публикациях [1-7], включая 3 статьи в изданиях, рекомендованных ВАК по специальности диссертации [1,2,3], 1 статья (в соавторстве) в журнале из списка ВАК по вычислительной технике и информатике [4] и 3 статьи в сборниках международных конференций [5,6,7].
Объем и структура диссертации. Общий объём диссертации, состоящей из введения, пяти глав, заключения и списка литературы – 133 страницы, в том числе 48 иллюстраций и 3 таблицы. Список литературы содержит 93 наименования.
Краткое содержание диссертации. Во введении показана актуальность темы, сформулированы цель работы и основные результаты, выносимые на защиту; отмечены научная и практическая ценность работы.
Глава 1 описывает математические методы классификации лазерных отражений, соответствующих земной поверхности, включая метод виртуальных поверхностей, разработанный и применяемый в комплексе АКС-ЛИДАР-3D.
В разделе 1.1 описан лидарный метод получения 3D-данных. Плотность измерений – до нескольких точек на кв. метр, а количество измерений на типичный проект достигает миллиарда.
Диссертация основана на интенсивном опыте автора по развитию и апробации программных средств и математических методов для обработки данных лазерного авиасканирования в 2003-2009 годах [1-7]. Таблица 1 показывает примеры лидарной статистики из выполненных проектов.
| Участок/размер | Общее кол-во точек | Первое отражение | Последнее отражение | Единств. отражение | Точек рельефа | Точек наземных объектов |
| Горы, 4.9 км2 | 4246006 | 0.6% | 0.6% | 98.8% | 79.5% | 20.5% |
| Лес, 0.34 км2 | 1218185 | 24.5% | 24.6% | 50.9% | 34.2% | 65.8% |
| Лес, 2.2 км2 | 1738686 | 50% | 50% | _ | 24% | 76% |
| Проект 1313 км2 | 730 млн | 50% | 50% | _ | 80.1% | 19.9% |
Таблица 1. Статистика лидарных отражений для различных областей [5]
Первые три строки таблицы 1 соответствуют разным проектам, в которых использовались различные типы лидаров; размер участков в этих строках соответствует площади прямоугольных областей, на которые разбивался первоначальный массив данных. Проекты отличаются по типу лидара и по плотности данных: в горной местности плотность измерений составила 0.87 на кв. метр; на лесистой равнине – 3.58. Таблица 1 показывает актуальность проблемы классификации данных: для получения модели «голой земли», используемой, например, при расчете наводнений, нужно удалить из данных от 20% до 76% отражений.
В разделе 1.2 рассмотрены существующие методы классификации. Воссельман (2000) разработал, а Ситхоул (2001) усовершенствовал алгоритм фильтрации лазерных данных, основанный на анализе наклона поверхности (slope-based filter или SB-фильтр). IPF-метод (1997) совмещает фильтрацию с интерполированием, строя по точкам отражений усредненную поверхность. Эти методы на практике демонстрируют существенные недостатки [7].
В разделе 1.3 излагается метод МООД – матричного описания процесса обработки данных лазерных отражений. Множество точек L в четырёхмерном пространстве координат X,Y,Z и интенсивности I, рассортировывается в три двумерные матрицы: ![]() – матрицу минимального значения высот отражений;
– матрицу минимального значения высот отражений; ![]() – матрицу максимального значения высот;
– матрицу максимального значения высот; ![]() – матрицу среднего значения интенсивности отражения. Вся последовательность обработки данных в матричном виде описывается следующим уравнением
– матрицу среднего значения интенсивности отражения. Вся последовательность обработки данных в матричном виде описывается следующим уравнением
Zjik = Aj … A1 Zik, (1)
где каждой процедуре обработки данных соответствует оператор Aj. Можно показать, что точность модели не ухудшится при использовании МООД, если расстояние между ячейками матрицы удовлетворяет условию
, (2)
где – поверхностная плотность точек лазерных отражений, а – обратная площадь типичного пятна лазерного отражения.
Метод МООД позволяет использовать для обработки лидарных данных математические методы и алгоритмы, разработанные ранее в фотограмметрии для двумерных изображений. МООД был положен в основу созданных автоматизированных комплексов программных средств обработки лидарных и радарных данных.
Количество последовательных процедур обработки матрицы 3D данных может исчисляться десятками. Каждая процедура меняет значение элемента и, строго говоря, вносит ошибку в это значение. Метод МООД позволяет создать матрицу достоверности Eik, учитывающую историю преобразований каждого элемента матрицы (пиксела). Определим матрицу изменений при j-ом преобразовании данных
Djik = Aj … A1 Zik – Aj-1 … A1 Zik. (3)
Введем матрицу операций Pjik, элементы которой принимают значения 0, если Djik = 0 или 1, если Djik 0. Неравенство нулю элемента матрицы Pjik означает, что над i,k-элементом матрицы произведена j-операция обработки.
Введем вектор ошибки j, компоненты которого соответствуют средней ошибке, вносимой j-операцией. Зная матрицу операций и вектор ошибки, для каждого i,k-пиксела можно записать уравнение суммарной ошибки после n операций с вычислением матрицы достоверности
. (4)
Метод МООД эффективен и для фундаментальной задачи извлечения из данных и распознавания объектов или структур, которые отличаются от фона яркостью или высотой и представляют собой связные множества. В процедуре выделения всех непересекающихся связных подмножеств из элементов заданной матрицы, построчное сканирование совмещается с анализом всех соседних матричных элементов – для выяснения их принадлежности подмножеству. Списки элементов подмножеств дают его интегральные параметры: площадь, периметр, средние значения высот и яркости и их дисперсию. Это позволяет уверенно классифицировать подмножества пикселов на землю, здания и деревья, озера и дороги.
Если критерий гладкости, группирующий пикселы в кластеры, применить к ![]() , матрице минимального значения высот, то самый большой по площади кластер соответствует поверхности земли, а сумма всех выделенных непересекающихся связных подмножеств равна исходной матрице. Метод МООД полезен для извлечения зданий любого размера, которые выглядят как связные кластеры с градиентом высот на границе.
, матрице минимального значения высот, то самый большой по площади кластер соответствует поверхности земли, а сумма всех выделенных непересекающихся связных подмножеств равна исходной матрице. Метод МООД полезен для извлечения зданий любого размера, которые выглядят как связные кластеры с градиентом высот на границе.
В разделе 1.4 детально описан метод виртуальной поверхности (МВП).
В статье [7] рассмотрен новый метод для фильтрации лидарных данных, который обладает положительными качествами SB-фильтра и его адаптивной версии, а также IPF-метода. При этом метод виртуальной поверхности избегает наиболее серьезных недостатков этих алгоритмов.
Метод виртуальной поверхности совмещает фильтрацию и интерполирование, получая в результате виртуальную поверхность земного рельефа, близкую к реальной. МВП использует фильтрующий элемент в виде поверхности шара. В отличие от SB-фильтра и IPF-метода, МВП применяется не к исходным точкам, а к данным, преобразованным в растровый вид, и работает, учитывая первые и последние отражения и автоматически варьируя степень фильтрации – в зависимости от количества растительности.
МВП в применении к файлу лидарных данных, прошедшему ряд предварительных процедур, состоит в следующих шагах [7]:
1. Для каждого пиксела строится сфера радиуса R (параметр метода), проекция центра которой на горизонтальную плоскость лежит в центре данного пиксела с координатами (Xi, Yj). Высота центра сферы Z0 определяется следующим образом:
- определяются все k пикселов, центры которых попадают в проекцию сферы на горизонтальную плоскость;
- для каждого такого пиксела с координатами (Xm, Yn, Zmn) строится сфера радиусом R и координатами проекции центра сферы в точке (Xi, Yj), так, чтобы поверхность сферы касалась данного пиксела снизу в точке (Xm, Yn, Zmn). Для такой сферы определяется высота центра сферы Zc (Zc < Zmn);
- минимальное значение из k величин Zc принимается за Z0.
Таким образом получаем формулу для нахождения центра сферы
 . (5)
. (5)
2. Набор из сфер, построенных для каждого пиксела, образует многослойную поверхность. Выберем для каждого пиксела высоту, равную максимальной высоте всех верхних полусфер, покрывающих данный пиксел. Образовавшаяся однозначная поверхность будет представлять виртуальную поверхность, близкую к искомой земной поверхности. Таким образом, Z-координаты точек земной поверхности можно получить так
 . (6)
. (6)
Сочетание методов МООД и МВП позволяет решить основную задачу классификации трехмерных данных: разделения множества точек L на подмножества точек отражения от земли G, растительности F и от зданий B
. (7)
Используя модель поверхности, полученную в (6), подмножества G, F и B можно определить как
, (8)
, (9)
где h ~ 15 см, а H ~ 30-50 м, в зависимости от начальной точности данных и предполагаемой максимальной высоты зданий в районе. При дальнейшем разделении подмножеств F и B используется условие гладкости связного множества пикселов, представляющих здание. Такие гладкие структуры отделены от фона градиентом высоты
, (10)
где H ~ 1 метр.
В разделе 1.5 сравнивается точность методов МООД-МВП и других подходов, в частности, SB-фильтра Воссельмана-Ситхоула [1]. Основные проблемы SB-фильтра показаны на рис. 1А: точки 7,8 на крутом склоне горы неверно исключены SB-фильтром из множества G точек земной поверхности, точки же 2 и 5 ошибочно включены в массив G – они принадлежат зданию и дереву возле водоёма.

Рис. 1. Сравнение методов SB-фильтра (А) и МООД-МВП (В). Тёмные крупные кружки – лидарные данные, классифицированные как земля, светлые кружки – как растительность или здания. Мелкие точки – реконструированные высоты.
Проведено количественное сравнение алгоритмов АКС-ЛИДАР-3D и растрового популярного метода, используемого компанией Intermap – на примере области, радарные данные для которой были обработаны как пакетом Intermap, так и пакетом АКС-ЛИДАР-3D. В пакете Intermap отражением от земли считается пиксел, близкий к наименьшему по высоте в некоторой области (метод применяется к радарным данным IFSAR, имеющим принципиально растровый характер). В окне, например, 2x2 находится средняя высота h0i. Считаются землей те пикселы окна, у которых высота hi удовлетворяет условию
![]() . (11)
. (11)
Выбор такого, близкого к наименьшему по сравнению с соседними, пиксела является в случае больших зданий или густого леса недостаточно эффективной процедурой, а в случае резких перепадов поверхности и узких русел рек – слишком агрессивной операцией, сглаживающей рельеф.
Благодаря набору контрольных геодезических точек для данной области – свыше 7 тысяч, проведено детальное исследование точности двух методов (таблица 2).
| Среднеквадратичная ошибка (метры) | ||
| Тип области и её наклон | ЦМР Intermap | ЦМР АКС-ЛИДАР-3D |
| Вся область проекта 0-2 град. 2-5 град. 5-10 град. 10-15 град. | 1.06 0.98 1.42 2.04 2.42 | 1.00 0.93 0.96 1.30 1.65 |
| Лес, все углы | 1.81 | 1.49 |
| Горы, все углы Горы, 8-30 град. | 1.45 2.43 | 1.29 1.69 |
Таблица 2. Сравнение точности по высоте моделей АКС-ЛИДАР и Intermap
В разделе 1.6 обсуждается экспериментальная проверка эффективности методов МООД и МВП для обработки трехмерных данных лазерного авиасканирования.
Глава 2 рассматривает методику создания и общую структуру автоматизированных комплексов программных средств для обработки больших объемов трёхмерных данных [2,4], которая позволяет разбить проблему обработки на ряд независимых подзадач и упростить ее решение.
В разделе 2.1 обсуждаются принципиальные особенности трехмерных геодезических данных и анализируются проблемы их обработки [2]. Имеющиеся решения для потоковой обработки и распознавания двумерных изображений малоприменимы из-за особенностей 3D-данных [2,4]. Трехмерные данные более информативны, чем их двумерные аналоги, однако их обработка связана с дополнительными сложностями и необходимы специальные алгоритмы, которые смогли бы максимально использовать имеющуюся информацию об объектах для их автоматической классификации.
В разделе 2.2 формулируются общие принципы создания автоматизированных программных средств обработки трехмерных геодезических данных лазерного сканирования, и строится схема конвейера из пяти стадий, который заложен в основу комплекса по обработке таких данных.
В разделе 2.3 анализируются требования, предъявляемые к программам по обработке трёхмерных лидарных данных и возможные пути их создания; обосновывается целесообразность получения базовой системы, состоящей из относительно простых в реализации компонентов, таких как растеризация или преобразование координат, которые могут быть использованы совместно для решения комплексных проблем обработки.
В разделе 2.4 описывается базовая архитектура комплексов по обработке 3D данных, включающая набор готовых системных и функциональных компонентов (рис. 2), позволяющая решать широкий круг задач по обработке трехмерных данных лазерного сканирования.
В разделе 2.5 рассмотрен один из вариантов схемы представления трехмерных лидарных данных, который сохраняет все дополнительные параметры измерений, такие как количество отражающих поверхностей на пути лазерного луча и их цвет в инфракрасном диапазоне, при этом позволяя эффективно упаковать эти данные в компьютерной памяти и использовать их для повышения точности классификации данных.
Рис. 2. Базовая архитектура комплекса по обработке 3D данных [4]
Глава 3 рассматривает программный комплекс обработки данных LIDAR (АКС-ЛИДАР). Комплекс АКС-ЛИДАР компенсирует неполноту данных и получает ИК-изображения высокого разрешения [3,5].
В разделе 3.1 обсуждается получение из лидарных данных инфракрасных изображений земной поверхности. Лазерное освещение в ближнем ИК-диапазоне 0.8-1.5 мкм дает черно-белое изображение, близкое к бестеневой фотографии видимого света. Инфракрасные лидарные изображения используются для картирования водоёмов, создания векторных моделей для дорог, построения характеристик растительности и строений.
В разделе 3.2 описывается архитектура автоматизированного комплекса обработки данных LIDAR для компенсирования неполноты данных и получения изображений высокого разрешения (комплекс АКС-ЛИДАР). Его архитектура – частный случай описанной в главе 2 общей архитектуры и включает в себя: калибровку интенсивности; сегментирование и преобразование координат; растеризацию изображений и обработку дефектов; интерполяцию и нормализацию.
В разделе 3.3 обсуждаются результаты тестирования комплекса АКС-ЛИДАР, который позволяет полностью автоматизировать процесс генерации ИК-изображений, начиная от «сырых» данных и заканчивая готовым к интеграции в ГИС продуктом. Он дает значительный выигрыш в скорости обработки и позволяет уменьшить требования к ресурсам системы.
За 2003-2009 годы с помощью АКС-ЛИДАР из лидарных данных было получено ~ 20 тыс. кв. км ИК-изображений с разрешением в 1 метр (рис. 3).
Глава 4 описывает комплекс программных средств для обработки и классификации геодезических данных LIDAR, созданный для генерации трехмерной цифровой модели поверхности земли [2,5,6].
В разделе 4.1 рассматриваются параметры лидарных данных, которые в оригинальном виде представляют собой набор координат и атрибутов общим объемом от десятков до сотен гигабайт. Для получения цифровой модели рельефа над данными необходимо произвести ряд операций: сортировку, интерполяцию, классификацию (выделение определенного типа объектов), визуализацию. Эффективная автоматизация таких операций является нетривиальной проблемой. Существующие программные средства не предусматривают комплексного подхода к этой проблеме, обеспечивая решение лишь некоторых распространенных задач.

Рис. 3. Лидарное ИК-изображение размером 900х494 м, разрешение 1м; возле аэропорта видны самолеты класса «Цессна», размещённые на стоянке [5]
В разделе 4.2 описываются архитектура и программные компоненты автоматизированного комплекса для классификации данных лазерного сканирования и моделирования трехмерных поверхностей (комплекс АКС-ЛИДАР-3D). Архитектура комплекса АКС-ЛИДАР-3D является частным случаем общей архитектуры, описанной в главе 2.
Комплекс АКС-ЛИДАР-3D предоставляет оператору широкие возможности визуализации 3D поверхности для проверки качества обработки и интерактивного исправления локальных недостатков ЦМР. Разработанные автором оригинальные алгоритмы классификации рассмотрены в [1-7].
В разделе 4.3 обсуждаются результаты тестирования комплекса АКС-ЛИДАР-3D и приведены примеры генерируемых им высокоточных трехмерных моделей земного рельефа.
Разработанный автоматизированный комплекс по мере своего усовершенствования в 2003-2009 годах прошел тестирование на большом объеме лидарных данных. За указанный срок было обработано несколько сот кв. км, измеренных с горизонтальным шагом от 20 до 50 см, и свыше 20 тыс. кв. км земной поверхности, сканированной с горизонтальным шагом в 1-2 метра (рис. 4). Средняя скорость полного цикла обработки составляла 500 кв. км в неделю, и точность полученной ЦМР значительно превосходила стандартные требования, согласно которым среднеквадратичная ошибка по высоте должна быть меньше чем 18.5 см.
Типичная ошибка по высоте составляла 11-14 см при горизонтальном шаге в 1-2 метра (по данным независимой экспертизы). В проекте с горизонтальным шагом 50 см среднеквадратичная ошибка была 6-8 см.
На рис. 5 приведен результат работы классифицирующих алгоритмов комплекса АКС-ЛИДАР-3D в сравнении с модулем RASCOR, созданным в Ганноверском университете (Германия). Видно, что RASCOR не смог полностью извлечь растительность и здания, оставив многочисленные пики, в то время как МВП построил достаточно гладкую модель рельефа, убрав всю растительность.
Комплекс АКС-ЛИДАР-3D также был апробирован в ходе обработки 22 тыс. кв. км радарных данных (IFSAR), при создании трехмерной модели земной поверхности с 5-м шагом по горизонтали и точностью по высоте ~ 1 м (см. таблицу 2). Комплекс продемонстрировал высокий уровень автоматизации (минимальное вмешательство оператора) и эффективность.
Глава 5 посвящена интерфейсу и программным средствам для эффективной визуализации и активной коррекции лидарных данных в ходе их обработки [2].
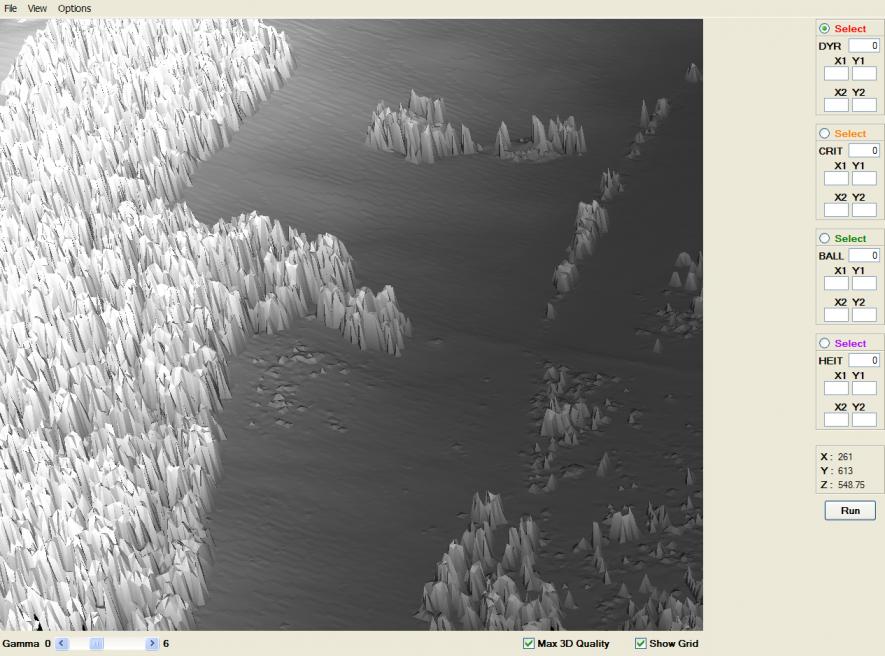

Рис. 4. а) Лидарные данные для опушки леса; б) Рельеф со старыми, заросшими лесом, выемками, полученный после обработки комплексом АКС-ЛИДАР-3D

Рис. 5. Работа алгоритмов классификации: (1) и (2) – исходные данные и результат работы немецкого пакета RASCOR; (3) и (4) – исходные данные и результат работы комплекса АКС-ЛИДАР-3D [4]
В АКС-ЛИДАР-3D разработан удобный интерфейс, позволяющий за 1-2 минуты пересчитать участок с новыми параметрами алгоритмов классификации.
В разделе 5.1 рассмотрены средства визуализации трехмерных данных, разработанные для комплекса АКС-ЛИДАР-3D. Качество и скорость полученной визуализации (рис. 6) сравнимы с популярными коммерческими ГИС. Производительности графического модуля хватает для работы с рельефом, состоящем из более чем 4 миллионов точек.
![Трехмерное изображение вытянутого карьера километровой длины [5] -12](/images1/407123/trehmernoe-izobrazhenie-vityanutogo.jpg)
Рис. 6. Трехмерное изображение вытянутого карьера километровой длины [5]
Основным преимуществом визуализационного модуля АКС-ЛИДАР-3D перед ESRI ArcGIS и Quick Terrain Modeler является возможность оперативно исправлять рельеф и на месте оценивать результаты работы алгоритмов классификации.
В разделе 5.2 описаны методы активной коррекции получаемых трехмерных моделей. После визуализации полученной ЦМР и выявления ошибки в рельефе, оператор может воспользоваться одним из инструментов активной коррекции трехмерных данных.
В разделе 5.3 описан модуль, который совмещает трехмерный рельеф с двумерными изображениями высокого разрешения. Реализованный модуль 3D рендеринга рельефа, за счет большого количества алгоритмов оптимизации, позволяет работать с ЦМР размером 4 миллиона точек, на которую наложена текстурная карта 6420x6420. Производительность на машине со старым Radeon 7000 32Mb, P4 2.8GHz составляет ~ 10 fps, при этом объем используемой памяти не превышает 400 МБ. На современных же машинах с мощными видеокартами скорость составляет ~ 500 fps.
Заключение содержит итоги диссертационной работы и формулирует направления для дальнейших исследований.
Основные результаты работы. Результаты диссертации, выносимые на защиту:
- Разработан математический метод классификации данных лазерного топографического сканирования, основанный на адаптивном анализе наклонов поверхности, а также алгоритм его реализации. Метод позволяет выделять точки, не принадлежащие земному рельефу, и отличается высокой производительностью. Сделаны анализ результатов применения метода к тестовому набору данных и сравнение его с существующими методами классификации.
- Построена новая модель представления трехмерных топографических данных, позволяющая преобразовать их в набор плоских матриц. Понижение размерности позволяет применить математические методы и алгоритмы, разработанные для двумерных изображений, упростить анализ идентификационных признаков объектов в данных, значительно сокращает временные затраты на обработку и снижает требования к оборудованию. Проведено исследование точности такого представления и доказана обоснованность его применения.
- Предложен новый подход к построению программных комплексов для обработки трехмерных топографических данных лазерного сканирования. В рамках подхода разработана спецификация универсальных компонент, реализующих часто используемые алгоритмы и подзадачи обработки, такие как интерполяция, классификация, растеризация, визуализация данных. Это позволяет интегрировать реализованные компоненты в необходимой последовательности, в зависимости от поставленных задач обработки данных. При разработке новых программ такая технология значительно сокращает этапы анализа, проектирования и тестирования.
- На основе предложенного подхода и разработанных моделях и методах были реализованы программные комплексы АКС-ЛИДАР и АКС-ЛИДАР-3D для обработки топографических данных лазерного сканирования, получения инфракрасных изображений высокого разрешения и моделирования трехмерных поверхностей. Эффективность предложенных решений и точность полученных моделей были экспериментально проверены автором при использовании его программ для обработки свыше 20 000 км2 земной поверхности.
Опубликованные статьи:
- Горькавый И.Н. Сравнительный анализ методов получения модели земной поверхности по трехмерным данным лазерного сканирования. // Известия высших учебных заведений. Геодезия и аэрофотосъемка. 2011. Вып.4. С.58-62.
- Горькавый И.Н. Автоматизированные программные средства обработки трехмерных данных лазерного сканирования. //Известия высших учебных заведений. Геодезия и аэрофотосъемка. 2008. Вып.4. С.22-34.
- Горькавый И.Н. Комплексный подход к автоматизации процесса обработки данных LIDAR для получения инфракрасных изображений высокого разрешения. //Известия высших учебных заведений. Геодезия и аэрофотосъемка. 2007. Вып.5. С.148-162.
- Сухомлин В.А., Горькавый И.Н. Технологическая система для построения программных комплексов автоматизации обработки 3D-данных лазерного сканирования. // «Информатика и ее применения». 2009. Т.3. Вып.2. С.53-64.
- Горькавый И.Н. Программные средства и математические методы обработки и классификации трехмерных данных. //Труды 3-ей Международной научно-практической конференции «Современные информационные технологии и ИТ-образование». /Ред. Сухомлин В.А., ВМиК МГУ, 2008. С.297-313.
- Горькавый И.Н. Автоматизация обработки данных лазерного сканирования для получения высокоточных трехмерных моделей земного рельефа. //Труды 2-й международной научно-практической конференции «Современные информационные технологии и ИТ-образование». /Ред. Сухомлин В.А., ВМиК МГУ, 2006. С.367-377.
- Горькавый И.Н. Метод виртуальной поверхности для классификации данных LIDAR и генерации трехмерной модели земного рельефа. //Труды первой международной научно-практической конференции «Современные информационные технологии и ИТ-образование». /Ред. Сухомлин В.А., ВМиК МГУ, 2005. С.583-597.