

Разработка методов и методик проектирования многоосевых микромеханических сенсоров угловых скоростей и линейных ускорений
На правах рукописи
ШЕРОВА Елена Викторовна
РАЗРАБОТКА МЕТОДОВ И МЕТОДИК ПРОЕКТИРОВАНИЯ МНОГООСЕВЫХ МИКРОМЕХАНИЧЕСКИХ СЕНСОРОВ УГЛОВЫХ СКОРОСТЕЙ И ЛИНЕЙНЫХ УСКОРЕНИЙ
Специальность 05.27.01 – Твердотельная электроника, радиоэлектронные
компоненты, микро- и наноэлектроника,
приборы на квантовых эффектах
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
кандидата технических наук
Таганрог 2010
Работа выполнена на кафедре конструирования электронных средств
Технологический институт ФГАОУ ВПО «Южный федеральный университет» в г. Таганроге
| Научный руководитель: | доктор технических наук, профессор Коноплев Борис Георгиевич (Технологический институт ФГАОУ ВПО «Южный федеральный университет» в г. Таганроге). |
| Официальные оппоненты: | доктор технических наук, доцент Рындин Евгений Адальбертович (Южный научный центр РАН, г. Ростов-на-Дону) кандидат физико-математических наук, доцент Корляков Андрей Владимирович (Санкт-Петербургский государственный электротехнический университет (ЛЭТИ) им. В.И. Ульянова (Ленина), г. Санкт-Петербург) |
| Ведущая организация: | ОАО «Конструкторско-технологический центр «Электроника», г. Воронеж |
Защита диссертации состоится “17” февраля 2011 г. в 14 ч. 20 мин. на заседании диссертационного совета Д 212.208.23 при Южном федеральном университете по адресу: 347922, г. Таганрог Ростовской области, ул. Шевченко, 2, аудитория Е-306.
С диссертацией можно ознакомиться в зональной научной библиотеке Южного федерального университета
Автореферат разослан “____”__________ 2010 г.
| Ученый секретарь диссертационного совета доктор технических наук, профессор | И.Б.Старченко |
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность работы
Микроэлектромеханические системы (МЭМС) определяют одно из перспективных направлений развития микроэлектроники XXI века. Рынок МЭМС в 2006 году составил ~6,3 млрд долл., в 2010г. он составил ~12,5 млрд долл. при среднегодовых темпах прироста 20 %.
Микроэлектромеханические системы – это устройства с интегрированными на поверхности или в объеме твердого тела электрическими и микромеханическими структурами. Статическая или динамическая совокупность этих структур обеспечивает реализацию процессов генерации, преобразования, передачи энергии и механического движения в интеграции с процессами восприятия, обработки, передачи и хранения информации.
В настоящее время наиболее динамично развивающимися микромеханическими компонентами являются сенсоры угловой скорости и линейного ускорения. Данные компоненты находят применения от микросистем стабилизации изображения в фотоаппаратах, видеокамерах и сотовых телефонах до инерциальных навигационных систем, используемых, как для ориентации и навигации подвижных объектов, так и для мониторинга параметров движения тела человека.
Сейчас на рынке МЭМС пользуются спросом одноосевые сенсоры угловых скоростей и сенсоры линейных ускорений. Однако, для уменьшения массы и габаритных размеров микросистем в целом, целесообразно применение двух- и трехосевых сенсоров угловых скоростей, функционально интегрированных с сенсорами линейных ускорений.
Диссертационная работа посвящена решению актуальной проблемы – функциональной интеграции многоосевых сенсоров угловой скорости и сенсоров линейного ускорения в одном устройстве, что позволяет улучшить массогабаритные характеристики данных микросистем, а также уменьшить их себестоимость, проработке технологических маршрутов изготовления, а также методов и методик проектирования данных сенсоров.
Состояние вопроса
Анализ литературы показывает, что использование технологии поверхностной микрообработки повышает степень интеграции элементов МЭМС и интегральных схем (ИС) и позволяет создавать большое число различных по функциональному назначению элементов микроэлектромеханических систем в одном технологическом процессе.
В данной работе разработаны сенсоры угловых скоростей и линейных ускорений, изготавливаемые по технологии поверхностной микрообработки.
Развитие МЭМС, в том числе микромеханических сенсоров угловых скоростей и линейных ускорений, тесно связано с областями их использования. Основными направлениями областей применения микроэлектромеханических систем, в том числе микромеханических сенсоров угловых скоростей и линейных ускорений являются системы ориентации, навигации и управления, медицина, энергетика, нефтяная и газовая промышленность, автомобилестроение, оборона.
Основу сенсоров МЭМС составляют электромеханические преобразователи, состоящие из чувствительного инерциального элемента, который связан через входной и выходной электрический контур, соответственно с актюатором и емкостным преобразователем перемещений. Основными параметрами электромеханических преобразователей являются чувствительность, разрешающая способность и надежность микросистем в целом. Свойства элементов преобразователей и протекающие в них процессы зависят от типа материала, технологии производства и внешних условий. Технология производства основана на планарной или объемной кремниевой микротехнологии с формированием электронных схем на одном чипе. Сложность и многообразие физических процессов, протекающих при работе таких преобразователей, затрудняют расчет и прогнозирование поведения таких элементов и достижение воспроизводимости, как их параметров, так и микромеханических компонентов в целом.
Таким образом, актуальна разработка конструкций, моделей, методов и методик проектирования, а также технологических маршрутов изготовления сенсоров угловых скоростей и линейных ускорений, ориентированных на современный уровень развития технологий микросистемной техники.
Цель работы
Целью данной диссертационной работы является разработка конструкций многоосевых интегральных сенсоров угловых скоростей и линейных ускорений, изготавливаемых по технологии поверхностной микрообработки, методов и методик их проектирования.
Для достижения поставленной цели в работе решались следующие основные задачи:
- разработка конструкций интегральных сенсоров угловых скоростей и линейных ускорений с двумя осями чувствительности, изготавливаемых по технологии поверхностной микрообработки;
- разработка конструкции интегрального сенсора угловых скоростей и линейных ускорений с тремя осями чувствительности, изготавливаемого по технологии поверхностной микрообработки;
- разработка и исследование электромеханических моделей интегральных двухосевых сенсоров угловых скоростей и линейных ускорений;
- разработка и исследование электромеханических моделей интегральных трехосевых сенсоров угловых скоростей и линейных ускорений;
- разработка методов и методик проектирования интегральных двухосевых сенсоров угловых скоростей и линейных ускорений;
- разработка методов и методик проектирования интегральных трехосевых сенсоров угловых скоростей и линейных ускорений.
Научная новизна
- предложен метод построения сенсоров угловых скоростей и линейных ускорений на основе принципов функциональной интеграции;
- разработаны и исследованы электромеханические модели одномассовых сенсоров угловых скоростей и линейных ускорений с двумя осями чувствительности, выполненных по технологии поверхностной микрообработки;
- разработаны и исследованы электромеханические модели двухмассовых сенсоров угловых скоростей и линейных ускорений с тремя осями чувствительности, выполненных по технологии поверхностной микрообработки.
Внедрение и практическое использование результатов работы
Предложенные интегральные конструкции и технологические маршруты изготовления, методы и методики проектирования двух- и трехосевых сенсоров угловых скоростей и линейных ускорений использованы в научно- исследовательских работах и разработках Научно-образовательного центра «Нанотехнологии» Южного федерального университета (г. Таганрог), использованы в НИР, выполненных по заданиям ФГУ РНЦ «Курчатовский институт», Министерства образования и науки РФ, а также внедрены в учебный процесс Технологического института ФГАОУ ВПО «Южный федеральный университет» в г. Таганроге, что подтверждается документами, приведенными в приложении.
Апробация работы
Основные результаты работы докладывались на: I, III Ежегодных научных конференциях студентов и аспирантов базовых кафедр Южного научного центра РАН (г. Ростов-на-Дону, 2005г., 2007г.); VIII-IX Всероссийских научных конференциях студентов и аспирантов «Техническая кибернетика, радиоэлектроника и системы управления» (г. Таганрог, 2006, 2008гг.); Международной научно-технической конференции «Фундаментальные проблемы радиоэлектронного приборостроения» (г. Москва, 2006-2010 гг.); XIX Всероссийской научно-технической конференции студентов, молодых ученых и специалистов «Биотехнические, медицинские и экологические системы и комплексы» (г. Рязань, 2006 г.); 14-ой Всероссийской межвузовской научно-практической конференции студентов и аспирантов «Микроэлектроника и информатика – 2007» (г. Москва, 2007 г.); IX-X Международных конференциях «Опто-, наноэлектроника, нанотехнологии и микросистемы» (г. Ульяновск, 2007-2010 гг.); VII Международной конференции «Химия твердого тела и современные микро- и нанотехнологии» (г. Кисловодск-г.Ставрополь, 2007 г.); XI Научной молодёжной школе по твердотельной электронике «Нанотехнологии, наноматериалы, нанодиагностика» (г. Санкт-Петербург, 2008 г.); X Конференции молодых ученых «Навигация и управление движением» (г. Санкт-Петербург, 2008-2009 гг.); Международной научно-технической школе-конференции «Молодые ученые - науке, технологиям и профессиональному образованию» (г. Москва, 2008 г.); Международной научно-технической конференции «Микроэлектроника и наноинженерия – 2008» (г. Москва, 2008 г.); Молодёжной школе по твердотельной электронике «Физика и технология микро- и наносистем» (г. Санкт-Петербург, 2009 г.); Всероссийской молодежной школе-семинаре «НАнотехнологии и инНОвации» (г. Таганрог, 2009 г.); Международной научно-технической конференции и молодежной школе-семинаре «Нанотехнологии – 2010» (г. Таганрог, 2010 г.); Ежегодных конференциях профессорско-преподавательского состава ТТИ ЮФУ (г. Таганрог, 2006-2009 гг.).
Основные положения и результаты, выносимые на защиту:
- Интегральные конструкции двухосевых и трехосевого сенсоров угловых скоростей и линейных ускорений.
- Электромеханические модели двухосевых и трехосевого сенсоров угловых скоростей и линейных ускорений.
- Методы и методики проектирования интегральных сенсоров угловых скоростей и линейных ускорений.
Публикации
По теме исследований опубликовано 31 печатная работа, в том числе 2 статьи в изданиях, рекомендованных ВАК, получено 3 патента РФ на изобретения. В ВНИИТЦ зарегистрировано 10 отчетов по НИР, выполненных при участии автора.
Структура и объем диссертации
Диссертация состоит из введения, четырех глав с выводами и заключения, а также списка литературы и приложений. Работа изложена на 228 страницах машинописного текста, 144 рисунках, 1 таблице и содержит список литературы на 13 страницах.
КРАТКОЕ СОДЕРЖАНИЕ РАБОТЫ
Во введении обоснована актуальность темы, сформулированы цель и задачи исследования, определены методы исследования, выделены научная новизна, основные защищаемые положения, приведены другие общие характеристики работы.
В первой главе анализируются преимущества и недостатки существующих технологий микросистемной техники, применяемых при изготовлении сенсорных элементов МЭМС. Приведена классификация и рассмотрены конструкции сенсоров угловых скоростей и линейных ускорений.
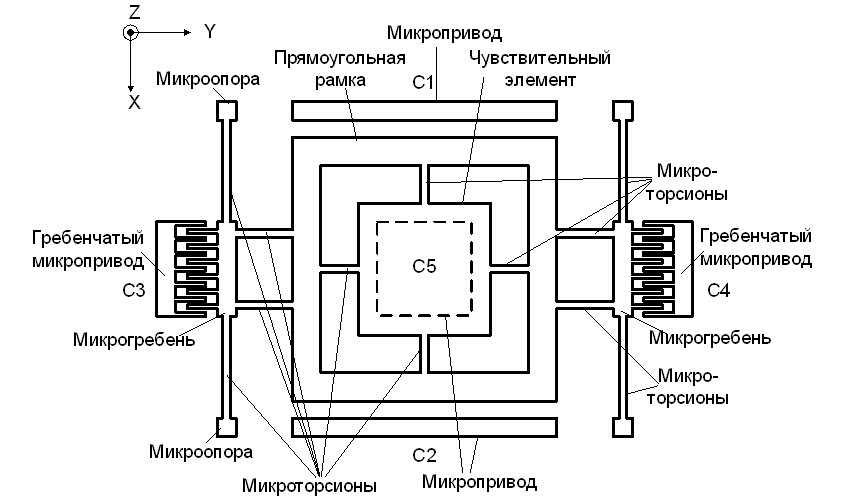
Во второй главе разрабатывается одномассовый сенсор угловых скоростей, функционально интегрированный с сенсором линейных ускорений с двумя осями чувствительности, изготавливаемый по технологии поверхностной микрообработки, что позволяет улучшить массогабаритные характеристики данных микросистем, а также уменьшить их себестоимость. Разработаны электромеханические модели двухосевого сенсора с одной инерционной массой для устройств регистрации угловых скоростей и линейных ускорений и выполнено моделирование, учитывающие как механические, так и электрические свойства данного сенсора. На рис.1 приведена конструкция разработанного одномассового двухосевого сенсора угловых скоростей и линейных ускорений (ММГА).
| Конструкция двухосевого сенсора угловых скоростей и линейных ускорений |
 |
| Рис.1 |
При подаче на гребенчатые микроприводы (рис. 1), например, расположенные вдоль оси Y, противофазных напряжений, относительно микрогребней возникает электростатическое взаимодействие, что приводит к возникновению колебаний последних в плоскости подложки вдоль данной оси. Колебания микрогребней передаются чувствительному элементу (ЧЭ, инерционная масса, ИМ) за счет s-образного изгиба микроторсионов. При возникновении угловой скорости вдоль оси X, ЧЭ под действием сил Кориолиса начинает совершать колебания перпендикулярно плоскости подложки за счет кручения и s-образного изгиба микроторсионов. Напряжение, генерируемое на емкостном преобразователе перемещений, образованное ЧЭ и микроприводом, лежащим под ним, характеризуют величину угловой скорости. При возникновении угловой скорости вдоль оси Z, направленной перпендикулярно плоскости подложки, ИМ под действием сил Кориолиса начинает совершать колебания в плоскости подложки ХY. Разность напряжений, генерируемых на емкостных преобразователях перемещений, образованных гребенчатыми микроприводами и микрогребнями, за счет изменения их площади взаимного перекрытия, характеризует величину угловой скорости.
Аналогичный процесс происходит при подаче противофазных напряжений на пару гребенчатых микроприводов, расположенных вдоль оси X, и возникновении угловых скоростей вдоль осей Y и Z.
При действии линейных ускорений вдоль осей X, Y, Z ЧЭ под действием сил инерции начинает совершать колебания вдоль данных осей за счет s-образного изгиба и кручения микроторсионов. Разность напряжений, генерируемых на емкостных преобразователях перемещений, образованных микрогребнями и гребенчатыми микроприводами, а также микроприводом и ЧЭ, за счет изменения их площади взаимного перекрытия, характеризует величину ускорения.
Для создания методики проектирования необходимо учесть отклик сенсора угловых скоростей и линейных ускорений в виде изменения емкости преобразователей перемещений. Под действием электростатической силы вдоль оси X, угловых скоростей вдоль осей Y, Z и линейных ускорений вдоль осей X, Y, Z происходит изменение емкостей преобразователей перемещений (см. рис. 1) С1 – С5, описанные следующими выражениями:
![]() ;
;
![]() ;
;
![]() ; (1)
; (1)
![]() ;
; ![]() ,
,
где – относительная диэлектрическая проницаемость воздушного зазора; 0 – электрическая постоянная; d0– расстояние между пальцами микрогребня и гребенчатого микропривода; h– толщина структурного слоя, N– количество пальцев на микрогребне; lpp – длина перекрытия пальцев гребенки; d – зазор между ИМ и микроприводом; Sнэ – площадь микропривода, расположенного под ЧЭ; yxэл – перемещение пальцев гребенки под действием электростатической силы вдоль оси OX; ![]() ,
,![]() – перемещение пальцев гребенки вдоль осей Y, Z под действием угловых скоростей вдоль осей Z, Y, соответственно:
– перемещение пальцев гребенки вдоль осей Y, Z под действием угловых скоростей вдоль осей Z, Y, соответственно:
![]()
![]() (2)
(2)
где k1, k2 – жесткость микроподвеса; x, y, z – угловая скорость в направлении соответствующих осей; v – линейная скорость перемещения ИМ под действием электростатической силы:
![]() ; (3)
; (3)
где U– внешнее напряжение, m – масса ЧЭ, – частота генерации силы;
![]() ,
,![]() – перемещение пальцев гребенки под действием ускорений вдоль осей X, Y, Z, соответственно:
– перемещение пальцев гребенки под действием ускорений вдоль осей X, Y, Z, соответственно:
![]()
![]() (4)
(4)
ax, ay, az – линейное ускорение в направлении соответствующих осей.
Под действием электростатической силы вдоль оси Y, угловых скоростей вдоль осей X, Z и линейных ускорений вдоль осей X, Y, Z изменение емкостей преобразователей перемещений находится аналогично.
В устройстве емкость изменяется во времени, причем амплитуда изменений определяет угловую скорость, а постоянная составляющая (усредненное значение) определяет линейное ускорение.
Разработана электромеханическая модель сенсора угловых скоростей и линейных ускорений.
Жесткости микроподвеса сенсора в режиме движения (РД) (вдоль оси Y) и режимах чувствительности (РЧ) (вдоль осей X и Z) определяются выражениями:
![]()
![]()
 , (5)
, (5)
где E – модуль Юнга; Jy2, Jy3, Jy4 – осевые моменты инерции сечений микроторсионов 2, 3, 4 соответственно; Lb2, Lb3, Lb4 – длины микроторсионов 2, 3, 4 соответственно, – коэффициент Пуассона, ![]() – полярный момент инерции микроторсионов, работающих на кручение.
– полярный момент инерции микроторсионов, работающих на кручение.
Разработана динамическая модель чувствительного элемента сенсора угловых скоростей и линейных ускорений, которую можно представить дифференциальными уравнениями второго порядка, причем первое уравнение системы описывает РД, а второе и третье – РЧ сенсора.
 (6)
(6)
где bx, by, bz, – коэффициенты демпфирования ИМ в направлении соответствующих осей, t– время, Fax, Fay, Faz, – сила под действием линейного ускорения в направлении соответствующих осей.
Полученная динамическая модель представляет собой основу для аналитического моделирования и сравнения с численным моделированием сенсора угловых скоростей и линейных ускорений и необходима для разработки методики проектирования данного устройства.
Результаты моделирования двухосевого сенсора угловых скоростей и линейных ускорений для типичных диапазонов угловых скоростей от ±300/сек до ±1500/сек и линейных ускорений от ±g до ±5g в программе VHDL-AMS, при длине микроторсионов 300 мкм, высоте и толщине микроторсионов 2 мкм показывают: амплитуда перемещений ИМ вдоль оси Y под действием электростатической силы составляет 25 мкм; амплитуда перемещений ИМ в режиме чувствительности при действии угловой скорости z,x=±300/сек и при изменении линейного ускорения от ±g до ±5g, составляет от 120 нм до 250 нм и от 300 нм до 2 мкм вдоль осей x и z, соответственно. При увеличении угловой скорости z,x до ±1500/сек амплитуда перемещений ИМ в РЧ незначительно увеличивается.
Исследованы переходные характеристики по предложенным моделям жесткости и динамической модели, показывающие зависимость перемещения ИМ вдоль оси Y от времени под действием ускорения от -100g до 100g.
Численное моделирование подтверждает предложенные модели жесткости, при хорошем совпадении качественной картины максимальное расхождение амплитудных значений в переходных режимах не превышает 3%, в установившихся режимах погрешность не превышает 2%.
Исследовано влияние технологических погрешностей на динамику одномассового двухосевого микромеханического сенсора угловых скоростей и линейных ускорений. Результаты исследований показали, что технологический дрейф интегрального микромеханического сенсора вносит менее 1% изменения собственных частот колебаний чувствительных элементов устройства.
Получены формулы для определения чувствительности сенсора угловых скоростей и линейных ускорений:
![]() и
и ![]() ; (7)
; (7)
где ![]() – резонансная круговая частота; Q – добротность колебательной системы.
– резонансная круговая частота; Q – добротность колебательной системы.
На рис.2-3 приведены некоторые результаты моделирования: изменение собственной частоты колебаний ИМ от геометрических размеров микроторсионов (рис.2 а); изменения емкостей преобразователей перемещений от скорости вращения ИМ в диапазоне ±1500/сек (рис.2 б); зависимость чувствительности системы от топологии микроподвеса (рис.3 а, б).
Зависимость собственной частоты колебаний ИМ от длины микроторсионов при Lb2=Lb3=Lb, Lb4=150 мкм, wb=5 мкм,hb=5 мкм  | Изменения емкости преобразователей перемещений от скорости вращения ИМ вокруг оси OZ 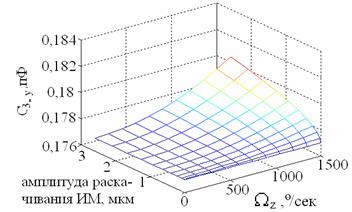 |
| а) | б) |
| Рис.2 | |
На рис. 2 а видно, что погрешность при моделировании двухосевых сенсоров угловых скоростей и линейных ускорений с одной ИМ по предложенным моделям жесткости по сравнению с численными методами менее 20%,а на некоторых участках не превышают 2%.
Зависимость чувствительности системы от длины микроторсионов вдоль оси OY  | Зависимость чувствительности системы от перемещения ИМ под действием ускорения вдоль оси OY  |
| а) | б) |
| Рис.3 | |
Получены экстремальные значения прикладываемого напряжения на микроприводы, с целью обеспечения устойчивости системы.
В данной работе предложен метод проектирования многоосевых микромеханических сенсоров угловых скоростей и линейных ускорений, основанный на принципе функциональной интеграции, позволяющий учесть многомерность, в отличие от одноосевых сенсоров, а также улучшить массогабаритные характеристики систем и уменьшить их себестоимость.
На рис. 4 предложена методика проектирования сенсоров угловых скоростей и линейных ускорений с одной инерционной массой и двумя осями чувствительности.
Методика проектирования двухосевого сенсора угловых скоростей
и линейных ускорений

Рис.4
Моделирование характеристик микромеханических сенсоров, спроектированных по предложенным методу и методике, показывают приемлемое соответствие заданным требованиям.
В третьей главе разрабатывается конструкция микромеханического сенсора угловых скоростей и линейных ускорений с одной инерционной массой и промежуточной рамкой, изготовленного по технологии поверхностной микрообработки.
На рис. 5 приведена конструкция разработанного микромеханического сенсора, позволяющего измерять величины угловой скорости по двум осям чувствительности и линейного ускорения по трем осям чувствительности.
| Конструкция двухосевого сенсора с инерционной массой и промежуточной рамкой |
 |
| Рис. 5 |
При подаче на микроприводы, расположенные вдоль оси X, переменных напряжений, сдвинутых относительно друг друга по фазе на 1800, относительно прямоугольной рамки, между ними возникает электростатическое взаимодействие, что приводит к возникновению колебаний последней в плоскости подложки, которые передаются чувствительному элементу через микроторсионы. При возникновении угловой скорости вокруг оси Y, ЧЭ под действием сил Кориолиса начинает совершать колебания перпендикулярно плоскости подложки. Напряжение, генерируемое на емкостном преобразователе перемещений, образованном ЧЭ и микроприводом, лежащим под ним характеризуют величину угловой скорости. При возникновении угловой скорости вокруг оси Z, ИМ c прямоугольной рамкой под действием сил Кориолиса начинает совершать колебания в плоскости подложки, направленные вдоль оси Y. Разность напряжений, генерируемых на емкостных преобразователях перемещений, образованных гребенчатыми микроприводами и микрогребнями, за счет изменения площади перекрытия, характеризуют величину угловой скорости.
При действии линейных ускорений вдоль осей Y, Z ЧЭ, жестко прикрепленный к прямоугольной рамке, под действием сил инерции начинает совершать колебания вдоль данных осей. Разность напряжений, генерируемых на емкостных преобразователях перемещений, образованных микрогребнями и гребенчатыми микроприводами, а также микроприводами и ЧЭ, за счет изменения их площади взаимного перекрытия и величины зазора между ними, соответственно, характеризует величину ускорения.
Под действием электростатической силы вдоль оси X, угловых скоростей вдоль осей Y, Z и линейных ускорений вдоль осей X, Y, Z происходит изменение емкостей преобразователей перемещений (см. рис.5) С1 – С5:
![]() ;
;
![]() ;
;
![]() ; (8)
; (8)
![]() ;
;
![]() ,
,
где lp – длина перекрытия между микроприводом и прямоугольной рамкой; lpp – длина перекрытия пальцев гребенки; d1 – расстояние между рамкой и микроприводом 1; d0 – расстояние между пальцами гребенки; d – зазор между ИМ и микроприводом; ![]() – перемещение ЧЭ вместе с прямоугольной рамкой под действием электростатической силы вдоль оси OX;
– перемещение ЧЭ вместе с прямоугольной рамкой под действием электростатической силы вдоль оси OX; ![]() – перемещение пальцев гребенки вдоль оси Y под действием угловых скоростей вдоль оси OZ;
– перемещение пальцев гребенки вдоль оси Y под действием угловых скоростей вдоль оси OZ; ![]() – перемещение ИМ вдоль осей OZ под действием угловых скоростей вдоль оси Y;
– перемещение ИМ вдоль осей OZ под действием угловых скоростей вдоль оси Y; ![]() – перемещение ИМ с прямоугольной рамкой под действием ускорений вдоль оси OX;
– перемещение ИМ с прямоугольной рамкой под действием ускорений вдоль оси OX; ![]() – перемещение пальцев гребенки под действием ускорений вдоль оси OY;
– перемещение пальцев гребенки под действием ускорений вдоль оси OY; ![]() – перемещение ЧЭ под действием ускорений вдоль оси OZ; Sнэ – площадь микропривода, расположенного под ИМ.
– перемещение ЧЭ под действием ускорений вдоль оси OZ; Sнэ – площадь микропривода, расположенного под ИМ.
Под действием электростатической силы вдоль оси Y, угловых скоростей вдоль осей X, Z и линейных ускорений вдоль осей X, Y, Z изменение емкостей преобразователей перемещений находится аналогично.
Разработана электромеханическая и динамическая модели сенсора угловых скоростей и линейных ускорений.
Результаты моделирования сенсора угловых скоростей и линейных ускорений с одной ИМ и промежуточной рамкой для типичных диапазонов угловых скоростей и линейных ускорений показывают: амплитуда перемещений ИМ вдоль под действием электростатической силы составляет 30 мкм; амплитуда перемещений ИМ в РЧ при действии угловой скорости z,x=300/с и при изменении линейного ускорения от ±g до ±5g, составляет от 240 нм до 600 нм и от 1,25 мкм до 7 мкм вдоль осей X и Z, соответственно; при увеличении угловой скорости z,x до ±1500/с амплитуда перемещений ИМ в режиме чувствительности увеличивается до 1,5 мкм вдоль оси X.
Исследованы переходные характеристики по предложенным моделям жесткости и динамической модели, показывающие, что численное моделирование подтверждает предложенные модели жесткости, при хорошем совпадении качественной картины максимальное расхождение амплитудных значений, как в переходных, так и в установившихся режимах не превышает 5%.
Учтена чувствительность двухосевого сенсора угловых скоростей и линейных ускорений с одной инерционной массой и промежуточной рамкой.
На рис.6 предложена методика проектирования сенсора угловых скоростей и линейных ускорений с одной инерционной массой и промежуточной рамкой, построенного на принципе функциональной интеграции и имеющего две оси чувствительности.
Моделирование характеристик интегральных двухосевых сенсоров угловых скоростей и линейных ускорений, спроектированных по предложенной методике, показывают приемлемое соответствие заданным требованиям.
В четвертой главе представлен двухмассовый интегральный микромеханический сенсор угловых скоростей функционально интегрированный с сенсором линейных ускорений с тремя осями чувствительности, выполненный по технологии поверхностной микрообработки.
Особенностью создания трехосевых сенсоров угловых скоростей и линейных ускорений на основе функциональной интеграции, является возможность регистрации угловых скоростей и линейных ускорений по трем осям чувствительности, что позволит уменьшить массогабаритные характеристики и себестоимость устройства.
На рис.7 приведена конструкция разработанного трехосевого сенсора угловых скоростей и линейных ускорений.
При подаче на гребенчатые микроприводы, расположенные вдоль оси X, противофазных напряжений, относительно микрогребней, между ними возникает электростатическое взаимодействие, что приводит к возникновению колебаний последних в плоскости подложки, которые передаются ЧЭ через микроторсионы. При возникновении угловой скорости вокруг оси Y, ЧЭ под действием сил Кориолиса начинает совершать колебания перпендикулярно плоскости подложки. Напряжение, генерируемое на емкостном преобразователе перемещений, образованном микроприводом, лежащим под ЧЭ, и ИМ характеризуют величину угловой скорости. При возникновении угловой скорости вокруг оси Z, ИМ под действием сил Кориолиса начинает совершать
Методика проектирования двухосевого сенсора угловых скоростей и линейных ускорений с одной инерционной массой и промежуточной рамкой

Рис. 6
колебания в плоскости подложки, направленные вдоль оси Y. Разность напряжений, генерируемых в парах емкостных преобразователей перемещений, образованных микроприводами и ЧЭ, за счет изменения величины зазора между ними, характеризует величину угловой скорости.
| Конструкция трехосевого сенсора угловых скоростей и линейных ускорений |
 |
| Рис. 7 |
Аналогичный процесс происходит со второй ИМ при подаче противофазных напряжений на пару микроприводов, расположенных вдоль оси Y, и возникновении угловых скоростей вдоль осей X и Z.
При действии линейных ускорений вдоль осей X, Y, Z ЧЭ под действием сил инерции начинает совершать колебания вдоль данных осей за счет s-образного изгиба и кручения микроторсионов. Разность напряжений, генерируемых на емкостных преобразователях перемещений, образованных микрогребнями и гребенчатыми микроприводами, а также микроприводами и ИМ, за счет изменения их площади взаимного перекрытия и величины зазора, характеризует величину ускорения.
Под действием электростатической силы вдоль оси X, угловых скоростей вдоль осей Y, Z и линейных ускорений вдоль осей X, Y, Z происходит изменение емкостей преобразователей перемещений С1 –С5:
![]() ;
;
![]() ;
;
![]() ; (9)
; (9)
![]() ;
;
![]() ,
,
Под действием электростатической силы вдоль оси Y, угловых скоростей вдоль осей X, Z и линейных ускорений вдоль осей X, Y, Z изменение емкостей преобразователей перемещений для второй ИМ находится аналогично.
Разработана электромеханическая и динамическая модели сенсора угловых скоростей и линейных ускорений.
Результаты моделирования трехосевого сенсора угловых скоростей и линейных ускорений с двумя ИМ показывают: амплитуда перемещений обоих ИМ в режиме движения под действием электростатической силы составляет 14 мкм, амплитуда перемещений одной ИМ в режиме чувствительности при действии угловой скорости z,x=±300/с и при изменении линейного ускорения от ±g до ±5g, составляет от 100 нм до 250 нм и от 260 нм до 1,5 мкм вдоль осей x и z, соответственно. Для второй инерционной массы значения амплитуд перемещений остаются такими же, меняются только оси чувствительности.
Исследованы переходные характеристики по предложенным моделям жесткости и динамической модели, показывающие, что данные численного моделирования подтверждают предложенные модели жесткости, при хорошем совпадении качественной картины максимальное расхождение амплитудных значений, как в переходных, так и в установившихся режимах не превышает 5%.
На рис.8 предложена методика проектирования сенсора угловых скоростей и линейных ускорений с двумя инерционными массами, построенного на принципе функциональной интеграции и имеющий три оси чувствительности.
Предложенный метод позволяет проектировать многоосевые сенсоры с учетом регистрации угловых скоростей и линейных ускорений по трем осям чувствительности. Для чего и были разработаны электромеханические модели и разработана методика проектирования сенсоров.
Моделирование характеристик микромеханических сенсоров, спроектированных по предложенному методу и методике, показывают приемлемое соответствие заданным требованиям.
В приложениях приводятся технологические маршруты изготовления сенсоров угловых скоростей и линейных ускорений с двумя и тремя осями чувствительности, акты и справки о внедрении и использовании результатов диссертационной работы.
Методика проектирования трехосевого сенсора угловых скоростей и линейных ускорений с двумя инерционными массами и промежуточной рамкой

Рис. 8
ОСНОВНЫЕ РЕЗУЛЬТАТЫ РАБОТЫ
- разработаны интегральные конструкции одномассовых сенсоров угловых скоростей и линейных ускорений с двумя осями чувствительности;
- разработана интегральная конструкция двухмассового сенсора угловых скоростей и линейных ускорений с тремя осями чувствительности;
- предложен метод построения сенсоров угловых скоростей и линейных ускорений на основе принципов функциональной интеграции;
- разработаны электромеханические модели интегральных двухосевых и трехосевого сенсоров угловых скоростей и линейных ускорений;
- разработаны методики проектирования интегральных двухосевых и трехосевого сенсоров угловых скоростей и линейных ускорений.
Публикации по теме диссертационной работы
Публикации в изданиях, рекомендованных ВАК РФ:
- Шерова Е.В., Лысенко И.Е. Моделирование упругого подвеса многоосевого микромеханического гироскопа-акселерометра // Известия вузов. Электроника. №4, 2009. С.48-55.
- Шерова Е.В., Лысенко И.Е., Коноплев Б.Г. Интегральный сенсор угловых скоростей и линейных ускорений // Инженерный вестник Дона, 2010.– №3. С.16-21
Публикации в других изданиях:
- Полищук Е.В.*, Чебураева И.В. Моделирование трехосевого микромеханического акселерометра-клинометра // Материалы I ежегодной научной конференции студентов и аспирантов базовых кафедр Южного научного центра РАН.– Ростов-на-Дону: Изд-во ЮНЦ РАН, 2005.– С.258-259.
- Полищук Е.В.*
- [1], Лысенко И.Е. Обзор принципов построения микромеханических генераторов энергии // Тезисы докладов VIII Всероссийской научной конференции студентов и аспирантов «Техническая кибернетика, радиоэлектроника и системы управления» (КРЭС-06).– Таганрог: ТРТУ, 2006.– С.275-276.
- Полищук Е.В.*, Лысенко И.Е. Моделирование многоосевого микромеханического акселерометра // Материалы Международной научно-технической конференции «Фундаментальные проблемы радиоэлектронного приборостроения» (INTERMATIC – 2006).– М.: МИРЭА, 2006.– Ч.3.– С.240-243.
- Лысенко И.Е., Полищук Е.В. *, Хайрулина В.А., Микромеханические насосы для лабораторий-на-кристалле // Материалы XIX Всероссийской научно-технической конференции студентов, молодых ученых и специалистов «Биотехнические, медицинские и экологические системы и комплексы» (БИОМЕДСИСТЕМЫ-2006).– Рязань: РГРТУ, 2006.– С.21-22.
- Полищук Е.В.*
- [2] Моделирование микромеханического гироскопа-акселерометра // Тезисы докладов 14-ой Всероссийской межвузовской научно-практической конференции студентов и аспирантов «Микроэлектроника и информатика – 2007». - М.: МИЭТ, 2007. – С. 116.
- Полищук Е.В.* Моделирование микромеханического гироскопа-акселерометра в гироскопическом режиме // Тезисы докладов III ежегодной научной конференции студентов и аспирантов базовых кафедр Южного научного центра РАН.– Ростов-на-Дону: Изд-во ЮНЦ РАН, 2007.– С.187-188.
- Лысенко И.Е., Полищук Е.В.* Моделирование микромеханического гироскопа-акселерометра на основе углеродных нанотрубок // Труды IX Международной конференции «Опто-, наноэлектроника, нанотехнологии и микросистемы». – Ульяновск: УлГУ, 2007. – С. 27.
- Полищук Е.В.* Методика проектирования микромеханического сенсора угловых скоростей и линейных ускорений // Тезисы докладов IX Всероссийской научной конференции студентов и аспирантов «Техническая кибернетика, радиоэлектроника и системы управления» (КРЭС-08).– Таганрог: ТТИ ЮФУ, 2008.– С.32-33.
- Лысенко И.Е., Полищук Е.В.* Многоосевой микромеханический гироскоп-акселерометр на основе углеродных нанотрубок // Труды VII Международной научной конференции «Химия твердого тела и современные микро- и нанотехнологии».– Кисловодск-Ставрополь: СевКавГТУ, 2007.– С.269-271.
- Полищук Е.В.* Механическая модель движения микромеханического гироскопа-акселерометра // Материалы Международной научно-технической конференции «Фундаментальные проблемы радиоэлектронного приборостроения» (INTERMATIC – 2007).– М.: МИРЭА, 2007.– Ч.2.– С.81-85.
- Шерова Е.В. Модель упругого подвеса микромеханического гироскопа-акселерометра // Тезисы докладов XI научной молодёжной школы по твердотельной электронике "Нанотехнологии, наноматериалы, нанодиагностика".– СПб: Изд-во СПбГЭТУ (ЛЭТИ), 2008.– С.64-65.
- Шерова Е.В., Приступчик Н.К. Моделирование многоосевого микромеханического гироскопа-акселерометра // Труды X конференции молодых ученых «Навигация и управление движением».– СПб.: ГНЦ РФ ЦНИИ «Электроприбор», 2008.– С.100.
- Шерова Е.В., Приступчик Н.К. Методика моделирования многоосевого автоэмиссионного акселерометра // Труды X конференции молодых ученых «Навигация и управление движением».– СПб.: ГНЦ РФ ЦНИИ «Электроприбор», 2008.– С.102.
- Шерова Е.В. Аналитическая модель упругого подвеса микромеханического гироскопа-акселерометра // Труды X Международной конференции «Опто-, наноэлектроника, нанотехнологии и микросистемы». – Ульяновск: УлГУ, 2008. – С. 100.
- Шерова Е.В. Микромеханический сенсор угловых скоростей и линейных ускорений // Труды X Международной конференции «Опто-, наноэлектроника, нанотехнологии и микросистемы». – Ульяновск: УлГУ, 2008. – С. 106.
- Шерова Е.В. Модель упругого подвеса трехосевого ММГА // Материалы Международной научно-технической школы-конференции «Молодые ученые - науке, технологиям и профессиональному образованию» (Молодые ученые – 2008).– М.: МИРЭА, 2008.– Ч.1.– С.179-182.
- Коноплев Б.Г., Шерова Е.В. Влияние технологических погрешностей на динамику трехосевого микромеханического гироскопа-акселерометра // Тезисы докладов Международной научно-технической конференции "Микроэлектроника и наноинженерия – 2008" – М.:МИЭТ, 2008. – С.141-142.
- Шерова Е.В., Приступчик Н.К. Моделирование многоосевого микромеханического гироскопа-акселерометра // Материалы докладов X конференции молодых ученых "Навигация и управление движением".– СПб.: ГНЦ РФ ЦНИИ «Электроприбор», 2009.– С. 375-382.
- Шерова Е.В., Приступчик Н.К. Методика моделирования многоосевого автоэмиссионного акселерометра // Материалы докладов X конференции молодых ученых "Навигация и управление движением".– СПб.: ГНЦ РФ ЦНИИ «Электроприбор», 2009.– С. 329-335.
- Шерова Е.В. Модель микроподвеса трехосевого микромеханического гироскопа-акселерометра // Тезисы докладов XII научной молодёжной школы по твердотельной электронике "Физика и технология микро- и наносистем".– СПб: Изд-во СПбГЭТУ (ЛЭТИ), 2009.– С.79-80.
- Шерова Е.В. Микромеханический сенсор угловых скоростей и линейных ускорений на основе углеродных нанотрубок // Тезисы докладов всероссийской молодежной школы-семинара «НАнотехнологии и инНОвации» (НАНО–2009). – Таганрог: ТТИ ЮФУ, 2009.– С.42-43.
- Шерова Е.В. Модель микроподвеса сенсора угловых скоростей и линейных ускорений // Материалы Международной НТК «Фундаментальные проблемы радиоэлектронного приборостроения».– М.: МИРЭА, 2009.– Ч.3.– С.80-83.
- Шерова Е.В., Лысенко И.Е. Влияние технологических погрешностей на динамику работы микропреобразователя угловых скоростей и линейных ускорений // Труды XI Международной конференции «Опто-, наноэлектроника, нанотехнологии и микросистемы». – Ульяновск: УлГУ, 2009. – С. 195.
- Шерова Е.В., Лысенко И.Е. Интегральные микромеханические гироскопы-акселерометры с наноразмерными элементами // Труды международной научно-технической конференции и молодежной школы-семинара. (Нанотехнологии – 2010).– Таганрог, 2010.– Ч.2.– С.181-183.
- Шерова Е.В., Лысенко И.Е. Динамическая модель чувствительного элемента сенсора угловых скоростей и линейных ускорений // Труды XII Международной конференции «Опто-, наноэлектроника, нанотехнологии и микросистемы». – Ульяновск: УлГУ, 2010. – С. 190.
- Шерова Е.В., Лысенко И.Е. Моделирование двухмассового сенсора угловых скоростей и линейных ускорений // Материалы IX Международной научно-технической конференции «Фундаментальные проблемы радиоэлектронного приборостроения» (Intermatic–2010).– М.: МИРЭА, 2010.– Ч.2.– С.102-105.
Патенты РФ:
- Коноплев Б.Г., Лысенко И.Е., Полищук Е.В.*
- [3] Интегральный микромеханический гироскоп-акселерометр на основе углеродных нанотрубок. // Патент РФ №2334237, 2008г.
- Коноплев Б.Г., Лысенко И.Е., Шерова Е.В. Интегральный микромеханический гироскоп-акселерометр // Патент РФ №2351896, 2009г.
- Коноплев Б.Г., Лысенко И.Е., Шерова Е.В. Интегральный микромеханический гироскоп-акселерометр // Патент РФ №2351897, 2009г.
Личный вклад диссертанта в работах, выполненных в соавторстве, заключается в следующем:
в [1, 8,10] – разработана интегральная конструкция ММГА;
в [2, 26] – разработана интегральная конструкция ММГА;
в [3,5] – выполнено моделирование трехосевого микромеханического акселерометра;
в [4, 6] – проведен обзор микромеханических компонентов;
в [14, 20, 28] – разработана интегральная конструкция ММГА и выполнено моделирование;
в [15, 24] – проведен анализ результатов моделирования;
в [19, 25, 27] – разработаны модели микромеханических компонентов и выполнено численное моделирование.
| ЛР 02205665 от 23.06.1997 г. | Подписано к печати ____. ____. 2010 г. |
| Формат 60х84 1/16. | Печать офсетная. |
| Бумага офсетная. | Усл.п. л. – |
| Заказ № _______ | Тираж 100 экз. |
©
Издательство Технологического института Южного федерального университета в г. Таганроге
Таганрог, 28, ГСП 17А, Некрасовский, 44
Типография Технологического института Южного федерального университета в
г. Таганроге
Таганрог, 28, ГСП 17А, Энгельса, 1
* Полищук Е.В. – девичья фамилия Шеровой Е.В.
* Полищук Е.В. – девичья фамилия Шеровой Е.В.
* Полищук Е.В. – девичья фамилия Шеровой Е.В.