

Стендовая информационно-измерительная система контроля геометрических параметров насосных штанг в процессе их ремонта
На правах рукописи
МЕЛЬКИН Александр Михайлович
СТЕНДОВАЯ ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ НАСОСНЫХ ШТАНГ В ПРОЦЕССЕ ИХ РЕМОНТА
Специальность: 05.11.16 – Информационно-измерительные
и управляющие системы (промышленность)
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
кандидата технических наук
Самара – 2008
Работа выполнена на кафедре «Информационно-измерительная техника»
Государственного образовательного учреждения высшего профессионального образования
«Самарский государственный технический университет»
Научный руководитель
| Доктор технических наук | Васильчук Александр Васильевич |
Официальные оппоненты:
| Заслуженный деятель науки РФ, доктор технических наук, профессор | Шатерников Виктор Егорович |
| кандидат технических наук | Галиуллин Рафаэль Минаксанович |
Ведущая организация:
МОО «Поволжское отделение Российской инженерной академии» г.Самара
Защита диссертации состоится 23 декабря 2008 года в 13 часов на заседании диссертационного совета Д 212.217.03 в аудитории №28 корпуса № 6 Самарского государственного технического университета (ул. Галактионовская, 141).
Отзывы на автореферат в двух экземплярах просим направлять по адресу: 443100, г. Самара, ул. Молодогвардейская 244, Самарский государственный технический университет, Главный корпус, на имя ученого секретаря диссертационного совета.
С диссертацией можно ознакомиться в библиотеке Самарского государственного технического университета по адресу: ул. Первомайская, 18.
Автореферат разослан ____ ноября 2008 г.
Ученый секретарь диссертационного
совета к.т.н., доцент Н.Г. Губанов
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность темы
Основным способом добычи нефти в мировой практике, по объему и широте применения, является добыча с помощью установок штанговых глубинных насосов (УШГН). Так, в США этим способом эксплуатируется 85% всего фонда скважин (более 470 тыс.), в России - около 59% (более 87 тыс.). Поэтому повышение надежности и эффективности применения УШГН, увеличение межремонтного периода и минимизация аварийных случаев, при которых значительные затраты идут на подъем и спуск всей штанговой колонны, является важной задачей.
Насосные штанги – это составные части штанговой колонны, которая предназначена для передачи возвратно-поступательного движения и продольного усилия от наземного привода к рабочему органу глубинного штангового насоса. Эти насосы работают на глубине 1,0 – 2,0 километров, и каждая колонна состоит из 150 – 300 штанг длиной до 9,5 метров каждая.
В процессе эксплуатации насосные штанги получают различные повреждения (большей частью – искривления), изнашиваются и обрываются. Большинство нефтяных скважин имеют наклонно-направленный профиль, что значительно снижает усталостную прочность штанг. Как показали статистические исследования, большинство обрывов штанг связано именно с наличием у них искривления оси вблизи головки.
В настоящее время существуют центры по ремонту насосных штанг, где производится их вытяжка до момента пластической деформации. Этот ремонт производится, в основном, с использованием ручного труда, что часто приводит к его неудовлетворительному качеству, зачастую штанги просто перекладываются к выправленным.
Следует отметить, что на существующих стендах по ремонту насосных штанг еще меньше внимания уделяется контролю качества правки, т.е. контролю геометрических параметров, а там, где это и производится, делается выборочно и с помощью ручных мерительных устройств. Классификация штанг по условным группам прочности не производится. А в процессе эксплуатации, штанги испытывают миллионы циклов нагружения, и наличие в них искривлений даже в пределах допустимых ГОСТом может привести к обрыву. В результате так и происходит, штанги попадают на участки колонны с нагрузками, превышающими их предел усталостной прочности, что ведет к обрывам колонн и дорогостоящим ремонтным работам.
Из сказанного выше следует, что существующие методики измерения отклонения геометрических параметров насосных штанг, и допустимые значения данных отклонений, включая предписанные ГОСТом, не дают гарантий их безаварийной работы в течение требуемого периода эксплуатации.
Отсутствие четких функциональных зависимостей допустимой нагрузки на штанги, отклонения их геометрических параметров, и низкая точность определения данных отклонений делает невозможным прогноз о работоспособности новых и отремонтированных насосных штанг.
Получение таких функциональных зависимостей и построение на их основе информационно-измерительной системы (ИИС), выполняющей с высокой точностью измерения геометрических параметров каждой отремонтированной штанги, позволит значительно повысить качество их ремонта. Это даст возможность снизить затраты на проведение ремонтных работ на скважине и потери от простоя скважины. Поэтому, создание ИИС контроля геометрических параметров штанг работающей непосредственно на стендах по их ремонту и позволяющей в сложных климатических и производственных условиях обеспечить высокую точность измерения геометрических параметров насосных штанг, в частности диаметра и эксцентриситета – является актуальной задачей.
Целью диссертационной работы является разработка стендовой информационно-измерительной системы контроля геометрических параметров насосных штанг в процессе их ремонта.
Для достижения указанной цели были поставлены и решены следующие задачи:
- Проведен анализ дефектных насосных штанг, причин их преждевременного разрушения, а так же анализ технологического процесса ремонта насосных штанг, на основании чего обоснована необходимость автоматизации процесса ремонта и создания высокоточной системы измерения геометрических параметров;
- Рассмотрены производственные требования к стендовой ИИС контроля геометрических параметров насосных штанг;
- Разработаны математические модели дополнительных напряжений для различных видов искривлений насосных штанг;
- На основании полученных моделей определены основные геометрические параметры, подлежащие измерению (диаметр и эксцентриситет), что показало достаточность проведения измерения в двух точках на поверхности штанг;
- Для измерения эксцентриситета разработаны тестовые методы, позволяющие учесть влияние на результат измерения всех возмущающих воздействий окружающей среды и связанных с этим дополнительных погрешностей;
- Разработана структурная схема стендовой информационно-измерительной системы для измерения геометрических параметров насосных штанг;
- Разработан и обоснован тестовый индуктивный преобразователь эксцентриситета насосных штанг. Проведен анализ методических и инструментальных погрешностей измерительной системы.
Основные методы исследования
При решении поставленных задач использовались методы математического моделирования, теория сопротивления материалов, теория погрешностей. Математическая модель разрабатывалась с помощью методов математического анализа и прикладных программ MATLAB.
Научная новизна заключается в следующем
- Разработан новый тестовый алгоритм функционирования ИИС эксцентриситета оси насосных штанг, в котором, в отличие от известных тестовых алгоритмов, используются только аддитивные тесты.
- Получено выражение для результирующей методической погрешности разработанного тестового алгоритма измерения, а так же её составляющих, что позволяет, использовать полученные соотношения для измерительных систем, функции преобразования которых аппроксимируются полиномами любого вида.
- Разработан тестовый индуктивный преобразователь эксцентриситета, обладающий высокой точностью и надежностью, в котором реализован предложенный тестовый алгоритм и устройство формирования аддитивных тестов.
- Разработана математическая модель напряжений в искривленной насосной штанге, которая, в отличие от известных, позволяет определять предельно допустимую нагрузку для штанг, имеющих сложные виды искривления.
- На основании разработанной модели сформулированы требования к метрологическим характеристикам измерительных преобразователей эксцентриситета, доказана необходимость совершенствования технологии изготовления насосных штанг и соответственно изменения ГОСТ 13677-96 в части требований, определяющих допустимую кривизну оси концов штанг и методов ее контроля.
Практическая значимость результатов
- Разработанная автоматизированная ИИС по сравнению с существующими средствами измерения геометрических параметров насосных штанг обеспечивает высокую точность измерения в сложных условиях эксплуатации на ремонтном стенде.
- Разработанный в диссертации тестовый алгоритм повышения точности измерения позволил проводить измерения эксцентриситета непосредственно в технологическом процессе ремонта штанг.
- Разработанная математическая модель насосной штанги позволяет определять её предельно-допустимые нагрузки и ресурс при сложных видах искривления.
Внедрение результатов работы
Результаты диссертационной работы, а именно математическая модель искривленной насосной штанги, алгоритм повышения точности измерения с использованием тестового метода успешно внедрены в ООО «Энерго-Пласт» (г. Балаково).
На защиту выносятся следующие научные результаты:
1. Тестовый алгоритм функционирования ИИС величины эксцентриситета оси насосных штанг, в котором функция преобразования (ФП) измерительных преобразователей (ИП) аппроксимируется полиномами любого вида.
2. Результаты исследования влияния различных составляющих погрешностей тестового метода измерения эксцентриситета оси вращении насосных штанг и выражение для оценки результирующей погрешности измерений.
3. Структура тестовых индуктивно - частотных измерительных преобразователей для измерения эксцентриситета оси вращении насосных штанг и их алгоритмы функционирования.
4. Математические модели дополнительных напряжений для различных видов искривлений насосных штанг, позволившие уточнить допуски и определить места контроля заданных отклонений.
5. Требования к эксплуатационным и метрологическим характеристикам ИИС исходя из особенностей технологического процесса и требуемой точности измерений.
Личный вклад
Основные научные результаты и рекомендации, содержащиеся в диссертационной работе и публикациях, получены автором самостоятельно и под руководством научного руководителя.
Публикации
Основные результаты исследования представлены в 10 печатных работах, в том числе из перечня, рекомендованных ВАК РФ - 3.
Структура и объем диссертации
Диссертация состоит из введения, пяти глав, заключения, содержит 156 страниц основного текста, 31 рисунок, список литературы из 67 наименований.
ОСНОВНОЕ СОДЕРЖАНИЕ РАБОТЫ
Во введении обоснована актуальность проблемы, определены цель и задачи диссертационной работы, сформулированы положения, выносимые на защиту.
В главе 1 проведен анализ насосной штанги, как объекта исследования. Исследованы факторы, влияющие на длительность работы штанг, выявлены наиболее частые причины обрывов штанг во время эксплуатации. К ним относятся наличие искривления оси штанги вблизи её головки и несоосность осей головки и тела штанги.
Проведен анализ существующих методов контроля геометрических параметров насосных штанг и обнаружения различных дефектов. Сформированы эксплуатационные и технологические требования к стендовой ИИС контроля геометрических параметров насосных штанг в процессе их ремонта.
Показано, что для уточнения метрологических требований к ИИС, а также для более точного определения зависимости ресурса штанги от отклонения её геометрических параметров и исследования данной зависимости, необходимо создание математических моделей напряжений при различных видах искривлений.
В главе 2 для создания математической модели напряжений в искривленной насосной штанге рассмотрен участок колонны насосных штанг, включающий в себя соединение длиной Lc (рис.1а) и прилегающие к головкам участки тела штанги. Выделены основные («чистые») виды искривления насосных штанг схематично изображенные на рисунках 1б-г:
- искривление по радиусу оси тела за головкой (рисунок 1б);
- перекос оси головки (рисунок 1в);
- параллельное смещение оси тела относительно оси резьбы головки (или муфты), иначе – несоосность резьбы и тела (рисунок 1г).
Проведен анализ основных видов искривления насосных штанг. Для основных видов искривления получены уравнения расчета напряжения изгиба в наиболее нагруженных сечениях. Показано, что зависимости, полученные с использованием теории упругого изгиба кривого стержня, дают более точные значения, чем аналогичные зависимости, полученные с использованием теории упругого изгиба прямого стержня.


Рисунок 1
Получены уравнения расчета напряжений изгиба штанг при комбинированных видах искривления (перекос оси и несоосность, искривление оси за головкой с радиусом ![]() у обоих соединенных концов, перекос оси головки у обоих соединенных концов). Показано, что все другие более сложные искривления можно представить комбинацией двух основных видов – перекоса оси головки, характеризуемого углом
у обоих соединенных концов, перекос оси головки у обоих соединенных концов). Показано, что все другие более сложные искривления можно представить комбинацией двух основных видов – перекоса оси головки, характеризуемого углом ![]() , и несоосностью, определяемой биением поверхности тела в сечениях, проходящих через точки А и В.
, и несоосностью, определяемой биением поверхности тела в сечениях, проходящих через точки А и В.
Анализ выражений полученных для комбинированных видов искривлений показал, что они могут быть получены методом суперпозиции (наложения) решений, полученных независимо друг от друга для каждой составляющей комбинированного искривления.
Принцип суперпозиции применительно к комбинированному искривлению концов штанг изложен следующим образом.
Пусть на участке оси, нагруженной усилием Р (рисунок 1а), колонны штанг, включающем соединение, имеется комбинированное искривление одного или обоих соединенных концов с i=n составляющими. Для каждой i-ой составляющей комбинированного искривления определим изгибающий момент в сечении х
![]()
где уi=f(x) отклонение оси колонны от линии действия силы, обусловленное действием изгибающего момента ![]() , независимо от моментов, соответствующих другим составляющим комбинированного искривления.
, независимо от моментов, соответствующих другим составляющим комбинированного искривления.
Построив эпюры изгибающих моментов ![]() для всех составляющих искривления и сложив их с учетом знаков, получим эпюру результирующего момента
для всех составляющих искривления и сложив их с учетом знаков, получим эпюру результирующего момента
![]() , (1)
, (1)
которая и определяет результирующее напряжение изгиба.
Другими словами, изгибающие моменты ![]() от отдельных составляющих комбинированного искривления суммируются по общепринятому в сопротивлении материалов правилу. Это правило распространяется и на случай пространственного искривления, когда составляющие комбинированного искривления расположены в разных плоскостях.
от отдельных составляющих комбинированного искривления суммируются по общепринятому в сопротивлении материалов правилу. Это правило распространяется и на случай пространственного искривления, когда составляющие комбинированного искривления расположены в разных плоскостях.
В этом случае результирующий изгибающий момент ![]() определяется векторной суммой моментов
определяется векторной суммой моментов ![]() для составляющих искривлений
для составляющих искривлений
![]() . (2)
. (2)
Используя принцип суперпозиции, для примера, определили напряжение изгиба в сечении А для случая равного перекоса оси головки у обоих соединенных концов:

 ,
,
что совпадает с выражением, полученным исходя из теории упругого изгиба кривого стержня.
Таким образом, в сложных случаях комбинированного искривления расчетные выражения для определения изгибающих моментов и напряжений изгиба могут быть получены суперпозицией решений, найденных для каждого из искривлений отдельно, без учета их взаимовлияния, что позволяет существенно облегчить решение практических задач контроля искривления и определения допустимых параметров искривления.
В главе 3 рассматривается создание стендовой информационно-измерительной системы контроля геометрических параметров штанг. Отмечено, что в целом стенд по ремонту насосных штанг состоит из трех блоков: подготовки к правке, правки и проверки остаточного искривления вблизи головки штанги. И самое важное место, с точки зрения влияния на конечный результат, занимает операция проверки остаточного искривления.
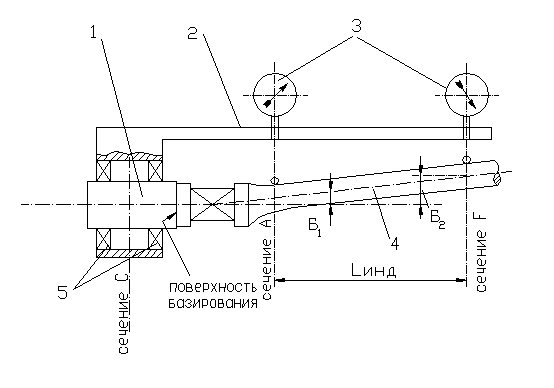
Рисунок 2
Для измерения параметров искривления наиболее приемлема схема измерения, при которой базовая деталь (муфта) индикатора-1 располагается на резьбе головки контролируемой штанги - 4 (рисунок 2). Стрела индикатора-2, на которой установлены измерительные преобразователи – 3, может вращаться вокруг оси муфты-1 на подшипниковой опоре-5.
Резьба базовой детали индикатора должна быть выполнена с положительными допусками (люфтом) относительно резьбы штанги таким образом, чтобы за счет данного люфта при затяжке муфты индикатора происходило базирование индикатора на плоскости упорного торца, даже если эта плоскость не является перпендикулярной к оси резьбы ниппеля.
В этом случае индикатор имитирует свинчивание контролируемой штанги с бездефектной (в части искривления оси) штангой и позволяет определить перекос осей контролируемой и бездефектной штанги независимо от причины перекоса. Причиной перекоса может быть искривление оси самой головки или неперпендикулярность упорного торца оси резьбы или комбинация обоих указанных факторов.
Подробно рассмотрены предельные величины отклонений, при которых напряжения изгиба, в наиболее нагруженных сечениях будут в пределах допустимых значений. Показано, что при соединении двух концов штанг, каждый из которых имеет предельно-допустимое искривление, напряжение изгиба ![]() или
или ![]() может превысить аналогичное напряжение, определенное при одном искривленном конце в два раза.
может превысить аналогичное напряжение, определенное при одном искривленном конце в два раза.
Показано, что данное устройство позволяет определить суммарное влияние всех видов искривлений на напряжения изгиба штанги. Наиболее опасным является комбинированное искривление конца штанги, при котором перекос оси головки и несоосность направлены в разные стороны. При тех же величинах предельных отклонений Б1 или Б2 напряжение изгиба для данной схемы может вдвое превысить аналогичное напряжения для чистого перекоса оси головки или несоосности.
Доказано, что необходимо совершенствование технологии изготовления насосных штанг и соответственно изменение ГОСТ 13677-96 в части требований, определяющих допустимую кривизну оси концов штанг и методов ее контроля.
В главе 4 описывается разработанный тестовый метод измерения эксцентриситета оси штанги относительно оси её вращения. На основании анализа диапазона измеряемых величин сформированы требования к метрологическим характеристикам измерительных преобразователей.
Показано, что измерительный канал ИИС при измерении диаметра, должен обеспечить погрешность измерения не превышающую 0,1%. При этом диапазон измерения должен лежать в пределах от 5 до 20 мм.
Рассмотрены случаи изменения измеряемого параметра в процессе принудительного вращения штанги при наличии каверн, истирания, эксцентриситета, что позволило определять наличие именно эксцентриситета.
Получено выражение, позволяющее связать величину эксцентриситета и углов поворота штанги с диаметром штанги.
Для исключения влияния аддитивной составляющей погрешности предложено проводить измерение диаметра и эксцентриситета двумя включенными встречно преобразователями.
Например, для линейной функции преобразования результаты измерения радиуса R0 двумя преобразователями запишутся в виде:
![]() , (3)
, (3)
вычитая одно из другого получили:
![]() . (4)
. (4)
Как видно из полученного уравнения при ![]() и
и ![]() результат измерения эксцентриситета не зависит от аддитивной составляющей ФП и величины
результат измерения эксцентриситета не зависит от аддитивной составляющей ФП и величины ![]() радиуса штанги
радиуса штанги
![]() . (5)
. (5)
Но создание двух идентичных измерительных преобразователей очень сложная техническая задача. А специфика измерения эксцентриситета предусматривает вращение штанги, следовательно, при измерении эксцентриситета можно использовать только один измерительный преобразователь, используя результаты измерений полученные при минимальном и максимальном значениях измеряемой величины, т.е. при повороте штанги на ![]() .
.
Для исключения влияния аддитивной и мультипликативной составляющих погрешности на результат измерения эксцентриситета, разработаны тестовые алгоритмы функционирования системы для ИИС, функции преобразования которых, описываются функциями любого вида.
В общем виде функция преобразования ИИС аппроксимируется полиномом
![]() . (6)
. (6)
Используя аддитивные тесты запишем результаты тактовых измерений для измерительного канала ИК1
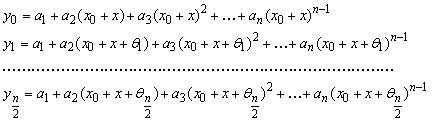 . (7)
. (7)
Для измерительного канала ИК2
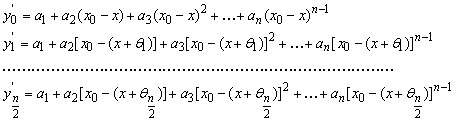 . (8)
. (8)
Проведя попарно вычитание уравнений из системы (7) и (8), а так же полагая, что n- четное число, представим системы уравнений (7) и (8) в виде
 (9)
(9)
где ![]() . (10)
. (10)
Обобщенный тестовый алгоритм повышения точности результата измерения сводится к решению системы уравнений (9) относительно измеряемой величины х при одновременном исключении влияния на результат измерения эквивалентных параметров bj, связанных с параметрами а1, а2,..., аn ФП исходных ИП зависимостью (10).
После преобразований, запишем для искомых параметров ФП преобразователя, обобщенное соотношение в виде
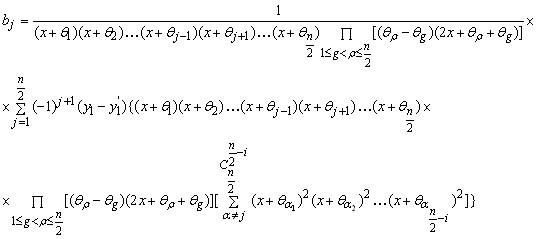 . (11)
. (11)
Подставляя решения (11) в уравнение (9) получим основное тестовое уравнение, связывающее результаты тестовых измерений y, величины образцовых приращений ![]() и измеряемую величину х:
и измеряемую величину х:
 (12)
(12)
Таким образом, получено тестовое уравнение с одним неизвестным х. Влияние всех параметров ![]() , а следовательно и
, а следовательно и ![]() функции преобразования на результат измерения исключено.
функции преобразования на результат измерения исключено.
Рассмотрен тестовый алгоритм для каналов измерения, аппроксимируемых линейными ФП. Проведя соответствующие преобразования получили:
![]() . (13)
. (13)
Выражение (13) является тестовым алгоритмом измерения для ИК аппроксимируемых линейными функциями преобразования, структурная схема, которых при совместной работе приведена на рисунке 3. Как видно из (13) результат измерения не зависит от параметров ![]() ФП, а точность его в основном определяется точностью задания образцового приращения
ФП, а точность его в основном определяется точностью задания образцового приращения ![]() .
.
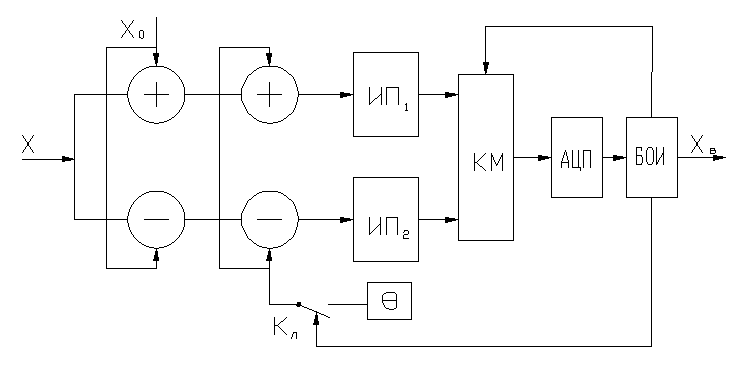
Рисунок 3
При этом следует иметь ввиду, что составляющая ![]() теста, является мерой при измерении величины х и обладает той же размерностью.
теста, является мерой при измерении величины х и обладает той же размерностью.
При описании функции преобразования измерительного канала полиномом второй степени можно получить тестовый алгоритм вычисления, аналогичный (13).
Это можно доказать, на примере двух тестовых измерений, в результате которых системы уравнений (8) и (9) примут следующий вид:
 (14)
(14)
Из (14) легко получить алгоритм вычисления х, путем деления друг на друга последних двух уравнений:
![]() ,
,
откуда
![]() . (15)
. (15)
Случай линейного и квадратичного описания ФП измерительных каналов, отличаются только параметрами b1. В линейном случае b1 = 2а2, а в квадратичном b1 = 2а2 + 4а3х0, но всвязи с тем, что параметры bi не входят в алгоритм вычисления измеряемой величины соотношения (15) и (16) являются идентичными. Заметим, что аналогичный вывод можно сделать при анализе основного обобщенного тестового уравнения (12).
В главе 5 анализируются погрешности тестового алгоритма измерения эксцентриситета оси вращении насосных штанг, и приводится структура разработанного тестового индуктивно-частотного измерительного преобразователя.
Получено выражение результирующей методической погрешности позволяющую учесть все составляющие, возникающие при проведении тактовых измерений, при использовании в качестве аппроксимирующей функцию преобразования измерительного канала полинома (n-1)-й степени:
 . (16)
. (16)
Результирующая методическая погрешность для линейных и квадратичных функций преобразований может быть представлена в виде:
![]() , (17)
, (17)
![]() . (18)
. (18)
Из (17) и (18), учитывая (16) для ![]() получили:
получили:
![]() . (19)
. (19)
Представлено выражение относительной приведенной ко входу погрешности ![]() тестового алгоритма преобразования описанной линейной или квадратичной частичной ФП:
тестового алгоритма преобразования описанной линейной или квадратичной частичной ФП:
 . (20)
. (20)
Проведя соответствующие преобразования для ![]() получили:
получили:
 (21)
(21)
Выражение (21) является обобщенным и из него могут быть получены выражения для ФП аппроксимируемой полиномами любой степени. Так при линейной и квадратичной ФП исходного канала измерения из (21) получили:
![]() . (22)
. (22)
Из (22), учитывая (18) для приведенной к выходу ИК динамической погрешности ![]() получили:
получили:
![]() . (23)
. (23)
Для определения влияния динамической погрешности на точность измерения использованы два метода. Один из них основан на проведении дополнительных тактов преобразования, в процессе которых определяется не только измеряемая величина, но и ее производные. Другой метод основан на проведении измерений рядом параллельно работающих идентичных измерительных каналов, что позволяет при сохранении быстродействия исключить влияние погрешности ![]() на результат.
на результат.
Проведено исследование погрешности неадекватности аппроксими-рующего полинома реальной ФП ![]() . Получено обобщенное выражение для
. Получено обобщенное выражение для ![]() :
:
 (24)
(24)
Получены выражения неадекватности аппроксимирующего полинома для линейной и квадратичной функции преобразования.
В рассматриваемой ИИС, для измерения перемещений в диапазоне до 20 мм, выбраны индуктивно-частотные датчики на основе генераторных схем, у которых элементами частотозависимых цепей являются индуктивности первичных измерительных преобразователей.
Показано, что в отличие от тестовых измерительных преобразователей с механическим смещением катушки индуктивности, преобразователи с переключаемыми секциями индуктивностей не имеют подвижных частей, что значительно упрощает конструкцию индуктивного преобразователя, повышает его надежность и долговечность. Кроме того, позволяет использовать их при аппроксимации исходной ФП полиномами более высоких степеней, требующих реализации нескольких аддитивных тестов.
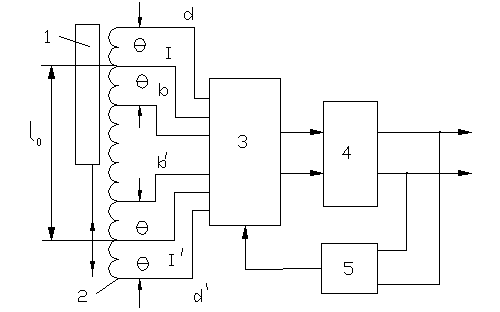
Рисунок 4
Структурная схема тестового индуктивно-частотного преобразователя для канала измерения эксцентриситета оси вращения насосной штанги приведена на рисунке 4.
На рисунке 4 приняты обозначения: 1 - ферритовый сердечник; 2 – катушка индуктивности; 3 – коммутатор; 4 – генератор; 5 – устройство управления. Катушка индуктивности содержит основную катушку ![]() и четыре вспомогательных
и четыре вспомогательных ![]() .
.
Вспомогательные катушки имеют одинаковые размеры и число витков, при чем размеры дополнительных катушек ![]() равны образцовому приращению
равны образцовому приращению ![]() , выраженному в единицах перемещения. Наличие четырех дополнительных тактовых секций объясняется тем, что при всех видах тактовых измерений общая длина катушки индуктивности, а следовательно и число ее витков, должны быть неизменными и равными длине
, выраженному в единицах перемещения. Наличие четырех дополнительных тактовых секций объясняется тем, что при всех видах тактовых измерений общая длина катушки индуктивности, а следовательно и число ее витков, должны быть неизменными и равными длине ![]() исходной катушки, участвующей в первом (основном) тактовом измерении.
исходной катушки, участвующей в первом (основном) тактовом измерении.
Функция преобразования индуктивно-частотного преобразователя описывается полиномом второй степени, следовательно, при первом тактовом измерении (отнеся его к максимальному отклонению ![]() оси вращения штанги по оси х-х) можно записать в виде
оси вращения штанги по оси х-х) можно записать в виде
![]() ,
,
где ![]() - радиус насосной штанги, х - эксцентриситет оси вращения.
- радиус насосной штанги, х - эксцентриситет оси вращения.
Второе тактовое измерение производится при подключении дополнительной катушки 1-I и отключении 1’-I’. При этом длина катушки 1-I’ остается равной длине исходной катушки I-I’, но рабочая зона, в которой находится сердечник – 1, увеличивается на величину ![]() .
.
Второе тестовое уравнение запишется в виде
![]()
После второго тактового измерения, коммутатор 3, переводит катушку индуктивности в первоначальное состояние.
Устройство управления вращения насосной штанги поворачивает последнюю на ![]() относительно оси х-х, вновь происходит исходное тактовое измерение
относительно оси х-х, вновь происходит исходное тактовое измерение ![]() при минимальном значении измеряемого параметра.
при минимальном значении измеряемого параметра.
![]()
Второе тактовое измерение производится при подключении дополнительной катушки I’-2’ и отключении I-2. При этом длина катушки 2-2’ также равна длине ![]() исходной катушки I-I’, а рабочая зона, в которой находится сердечник -1, уменьшается на величину
исходной катушки I-I’, а рабочая зона, в которой находится сердечник -1, уменьшается на величину ![]() .
.
Второе тактовое уравнение запишется в виде
![]()
Составляя из двух групп уравнений систему и решая ее аналогично вышеописанному способу, получили тестовый алгоритм вычисления эксцентриситета оси вращения штанги
![]() .
.
Результаты проведенных исследований были подтверждены экспериментально при создании опытного образца преобразователя с переключаемыми секциями индуктивностей в организации ООО «Энерго-Пласт».
Данный образец преобразователя, из-за предполагаемой эксплуатации в условиях повышенной влажности, был изготовлен в корпусе из нержавеющей стали. Внутри корпуса находятся направляющие для контактного штока и пружина для возвращения штока в начальное положение. А также катушка индуктивности с переключаемыми секциями и сердечник, прикрепленный к контактному штоку. Образец был размещен на модели устройства определения остаточного искривления вблизи головки насосных штанг, как показано на рисунке 5.

Рисунок 5
Управление правкой и измерение эксцентриситета осуществлялось с помощью -контроллера (производства MITSUBISHI ELECTRIC). Измерения производились на насосных штангах, имеющих различные виды и величины искривления.
При этом результаты измерений имели погрешность не превышающую 0,1% от заданного диапазона перемещения контактного устройства, что полностью удовлетворяют требованиям предъявляемым к системе и по ГОСТу, и по более жестким требованиям, указанным в четвертой главе настоящей работы.
ОСНОВНЫЕ РЕЗУЛЬТАТЫ РАБОТЫ
Диссертационная работа посвящена решению актуальной задачи создания стендовой информационно-измерительной системы контроля геометрических параметров насосных штанг в процессе их ремонта, обеспечивающей высокую точность измерений в сложных условиях эксплуатации. Проанализированы причины преждевременного разрушения штанг, разработана математическая модель напряжений при различных видах искривлений насосных штанг. На основе полученной модели разработано устройство для определения суммарного влияния всех видов искривлений на усталостную прочность штанги. Разработан тестовый алгоритм измерения эксцентриситета оси штанги относительно оси ее вращения. Проведен анализ влияния различных погрешностей на результат измерения. Показана эффективность использования разработанной ИИС.
В работе получены следующие основные результаты:
1. В результате анализа причин обрывов насосных штанг в процесс их эксплуатации показано, что большинство преждевременных обрывов насосных штанг связано с накоплением усталостных повреждений между твердой муфтой и переходной областью и более гибким телом штанги.
2. Разработаны математические модели дополнительных напряжений в штанге при перекосе оси головки, несоосности резьбы и тела штанги, а также при сложных искривлениях, включающих искривления нескольких видов. При этом показано, что сложные искривления можно свести к комбинации двух основных видов чистого искривления – перекосу оси головки и несоосности. Исследованы случаи искривления обоих соединенных концов.
3. Описано предлагаемое устройство для определения величины искривления вблизи головки насосной штанги, которое позволяет определить суммарное влияние всех видов искривлений на напряжения изгиба штанги. Рассмотрены величины отклонений, при которых напряжения изгиба, в наиболее нагруженных сечениях лежат в пределах допустимых значений и показано, что необходимо совершенствование технологии изготовления насосных штанг и соответственно изменение ГОСТ 13677-96 в части требований, определяющих допустимую кривизну оси концов штанг и методов ее контроля.
4. На основании анализа уточненного диапазона измеряемых величин сформированы требования к метрологическим характеристикам измерительных преобразователей. Рассмотрено, как изменяется измеряемый параметр в процессе принудительного вращения штанги.
5. Разработаны тестовые алгоритмы функционирования системы измерения диаметра и эксцентриситета оси вращения насосных штанг для ИП, функции преобразования которых, описываются функциями любого вида. Получен тестовый алгоритм для измерительных каналов, аппроксимируемых линейной ФП. Предложена структурная схема, позволяющая реализовать тестовый алгоритм измерения для ИК, имеющих идентичные и линейные функции преобразования.
6. Для определения результирующей погрешности ИИС рассмотрены влияния статической и динамической погрешностей на результат измерений, а также проведено исследование погрешности неадекватности аппроксимирующего полинома реальной функции преобразования.
7. Показано, что в рассматриваемой ИИС для измерения перемещений в диапазоне до 20 мм с заданной погрешностью, эффективными являются индуктивно-частотные преобразователи с переключаемыми секциями индуктивностей, которые не имеют подвижных частей, что упрощает их конструкцию, повышает надежность и долговечность, и позволяет использовать их при аппроксимации исходной ФП полиномами более высоких степеней, требующих реализации нескольких аддитивных тестов.
НАУЧНЫЕ ПУБЛИКАЦИИ ПО ТЕМЕ ДИССЕРТАЦИИ:
1. Куликовский К.Л., Мелькин А.М. Математическая модель для автоматического контроля состояния насосных штанг // Вестник Самарского государственного технического университета, серия «Технические науки» №35 Самара 2008. – с. 191-193.
2. Васильчук А.В., Мелькин А.М Измерение изгибающего момента в сечениях штанговых колонн глубинных насосов // Известия Самарского научного центра РАН, выпуск 5, Технологии управления организацией. Качество продукции и услуг / Самара – 2008. – с. 13-16.
3. Васильчук А.В., Мелькин А.М. Анализ методических погрешностей и способов их уменьшения при измерении эксцентриситета насосной штанги относительно оси ее вращения // Известия высших учебных заведений. Поволжский регион. Технические науки. Выпуск 3, Пензенский государственный университет – 2008. – с. 23-26.
4. Мелькин А.М. Автоматизация процесса ремонта и контроля состояния насосных штанг. Автоматизированный стенд по ремонту насосных штанг // Труды Поволжского регионального Научно-Технического центра Метрологической Академии РФ, выпуск 16, том 2, серия ИИУС / Самара – 2005. – с. 44-52.
5. Куликовский К.Л., Мелькин А.М., Чистяков М.В. Измерение изгибающего момента в сечениях обсадных, НКТ и штанговых колонн, находящихся в искривленном интервале ствола скважины // Труды Поволжского регионального Научно-Технического центра Метрологии Академии РФ, выпуск 17, серия ИИУС / Самара – 2005. – с. 35-43.
6. Мелькин А.М. Автоматизация процесса измерения геомет-рических параметров насосных штанг перед их ремонтом. ИИС блока подготовки штанг к правке // Сб.науч.статей, Информационно-измерительные и управляющие системы / Самара – 2008. – с. 48-58.
7. Мелькин А.М., Анализ факторов приводящих к обрывам колонн насосных штанг во время эксплуатации // Труды Поволжского регионального Научно-Технического центра Метрологии Академии РФ, выпуск 19, серия ИИУС / Самара – 2007. – с. 143-150.
8. Мелькин А.М., Математическая модель насосной штанги для автоматического определения предельно-допустимых величин искривления // Труды Поволжского регионального Научно-Технического центра Метрологии Академии РФ, выпуск 19, серия ИИУС / Самара – 2007. – с. 150-165.
9. Куликовский К.Л., Мелькин А.М. Тестовые индуктивно-частотные ИИС эксцентриситета насосных штанг // Сб.науч.статей, Информационно-измерительные и управляющие системы / Самара – 2008. – с. 59-65.
10. Мелькин А.М., Мельников Е.В., Татаренко Е.И. Программирование -контроллера с помощью LVS программного обеспечения: учебное пособие.- Самара.: Самар.гос.техн.ун-т, 2007. – 93 с.
Автореферат отпечатан с разрешения диссертационного совета Д 212.217.03 ГОУ ВПО «Самарский государственный технический университет» (протокол № 9 от 14 ноября 2008 года)
Заказ № 778, Тираж 100 экз. Отпечатано на ризографе.
Самарский государственный технический университет
Отдел типографии и оперативной печати
443100, г.Самара, ул. Молодогвардейская 244