

Управлени е первичными и вт о ричными колебаниями микромеханического г и роскопа
На правах рукописи
Ковалев Андрей Сергеевич
управлениЕ первичными и вторичными колебаниями микромеханического
гироскопа
Специальность 05.11.03 – Приборы навигации
АВТОРЕФЕРАТ
диссертации на соискание ученой
степени кандидата технических наук
Санкт-Петербург
2008
Работа выполнена в Федеральном государственном унитарном предприятии ЦНИИ «Электроприбор» - Государственный научный центр Российской Федерации.
Научный руководитель: кандидат технических наук,
Пономарев В.К.
Официальные оппоненты: доктор технических наук, профессор
Лукьянов Д.П.
кандидат технических наук, доцент
Филонов О.М.
Ведущая организация: ОАО «Авангард»
(г. Санкт-Петербург).
Защита состоится «20» февраля 2008 г в 15 часов на заседании диссертационного Совета ДС 411.007.01 при ФГУП ЦНИИ «Электроприбор» по адресу: 197046, Санкт-Петербург, ул. Малая Посадская, 30.
С диссертацией можно ознакомиться в библиотеке ЦНИИ «Электроприбор».
Автореферат разослан 2008 г.

Ученый секретарь диссертационного совета
доктор технических наук, профессор Колесов Н.В.
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность темы диссертации. Освоение технологии изготовления 3D механических структур с использованием оборудования, применяемого в микроэлектронике, открыло путь к созданию сверхминиатюрных электромеханических систем. Это новое направление в области приборостроения получило название технологии МЭМС (микроэлектромеханических систем). Наиболее сложными МЭМС устройствами являются микромеханические гироскопы (ММГ), появившиеся на рынке сравнительно недавно.
Работы по созданию ММГ начались с 1990-х г. в ряде ведущих лабораторий и институтов зарубежных стран. В настоящее время несколько крупных зарубежных фирм серийно выпускают ММГ низкого класса точности, например, Analog Devices, Epson, BAE, Honeywell, Bosch и др.
В зарубежных странах ММГ используются в автомобильной промышленности, робототехнике, системах стабилизации различных объектов от беспилотных летательных аппаратов до видеокамер.
Повышение точности ММГ позволит использовать их в новых областях гражданской и военной техники, в частности для обеспечения навигации и управления малыми подвижными объектами. Примерами таких объектов являются беспилотные летательные аппараты или “интеллектуальные снаряды”.
В России разработка ММГ находится на этапе изготовления и исследования опытных образцов. Однако важность этого направления приборостроения подтверждается списком критических технологий, утвержденным президентом России 21.05.2006 (п.п.11 и 23). В настоящее время отечественные производители миниатюрных интегрированных систем используют зарубежную элементную базу (например, система STA30 разработки НТЦ “РИССА”). Производство отечественных ММГ позволит заместить импортируемую технику и снизить зависимость разработчиков от зарубежных поставщиков.
Принцип действия ММГ основан на измерении вторичных колебаний инерционной вибрирующей массы, которые возникают под действием кориолисовых сил инерции при вращении основания. Одним из эффективных способов увеличения точности в таких гироскопах является использование резонансных свойств чувствительного элемента (ЧЭ) датчика. При этом первичные колебания возбуждаются на собственной частоте его механического резонанса. Максимальная чувствительность датчика достигается при равенстве собственных частот первичных и вторичных колебаний. Однако погрешности изготовления не позволяют обеспечить такую настройку с необходимой точностью. Кроме того, приборы с резонансной настройкой имеют очень узкую полосу пропускания. Специалисты считают, что наиболее эффективный путь повышения точности – это создание приборов с активным управлением характеристиками первичных и вторичных колебаний.
Вопросам разработки высокоточных ММГ и повышения их точности посвящено множество статей и патентов, при этом в большей их части объектом исследований и разработки являются приборы прямого типа измерения.
Публикации о принципах создания высокоточных ММГ компенсационного типа носят более поверхностный или фрагментарный характер, что обусловлено, по всей видимости, стремлением авторов защитить свои “ноу-хау”, а так же тем, что высокоточные ММГ являются в ряде стран (США, Франция, Германия, Великобритания) продукцией двойного назначения.
Среди доступных публикаций можно отметить стандарт IEEE 1431-2004 по испытаниям ММГ, а также статьи зарубежных исследователей Geen J., Ward P, Clark W.A., Shkel A, Geiger W, Link T.
В России публикаций о разработках ММГ существенно меньше. Причиной этого является несовершенство отечественной технологической базы и недостаточное финансирование проектов. Разработки ММГ ведутся в ГНЦ ФГУП “ЦНИИ “Электроприбор””, ЗАО “Гирооптика”, Раменском РПКБ, на кафедрах университетов СПб ГУАП, МИЭТ, ТРТУ и др. Из отечественных публикаций можно отметить монографии В.Я. Распопова и А.С. Неаполитанского, статьи А.М. Лестева, Л.П. Несенюка, М.И. Евстифеева, С.Г. Кучеркова, Л.А.Северова, В.К. Пономарева, А.И. Панферова, Я.А. Некрасова, Ю.В. Шадрина, В.Э. Джашитова, Ю.А. Чаплыгина, Д.П. Лукьянова, А.П. Мезенцева.
Целью диссертационной работы является разработка научных основ и методик проектирования систем управления первичными и вторичными колебаниями в ММГ прямого и компенсационного типа измерений.
Для достижения данной цели в работе решены следующие основные задачи:
1. Составлена уточненная модель ММГ, учитывающая влияние моментов электростатического тяжения со стороны электромеханических элементов конструкции.
2. Проанализировано влияние моментов внешних сил на динамику ротора ММГ.
3. Получены математические модели динамики для амплитуды первичных колебаний и огибающих вторичных колебаний ММГ.
4. Исследованы методы возбуждения первичных колебаний.
5. На основе амплитудных моделей разработаны и исследованы методы стабилизации параметров первичных колебаний.
6. Исследованы методы управления вторичными колебаниями путем организации позиционной и демпфирующей обратной связи в ММГ.
7. Разработан и исследован метод совмещения частот первичных и вторичных колебаний на основе фазовых измерений.
8. Разработана методика синтеза регулятора в ММГ компенсационного типа при реализации режима совмещенных частот.
9. Обоснована возможность организации управления фазными составляющими с использованием моделей синфазной и квадратурной огибающих вторичных колебаний в ММГ компенсационного типа.
10. Получено теоретическое и экспериментальное подтверждение работоспособности контуров управления первичными и вторичными колебаниями, синтезированных по разработанным методикам.
Методы исследования
Для решения поставленной задачи в работе использовались методы и аппарат теоретической механики, теории колебаний, теории автоматического управления, цифровой обработки информации, математического анализа и компьютерного моделирования.
Новыми научными результатами являются:
- математическая модель ММГ роторного типа, учитывающая влияние моментов электростатического тяжения со стороны электромеханических элементов конструкции;
- классификация систем управления первичными колебаниями ММГ на основе разработанных классификационных признаков;
- математические модели динамики амплитуды первичных колебаний и огибающих синфазной и квадратурной составляющих колебаний ММГ по оси вторичных колебаний, а также методики их получения;
- методика синтеза системы стабилизации параметров первичных колебаний ММГ на основе амплитудных моделей динамики;
- методика синтеза системы управления вторичными колебаниями ММГ компенсационного типа, основанные на моделях динамики огибающих, с использованием амплитудных и фазовых детекторов, реализующие режим совмещенных частот и формирование требуемой полосы пропускания датчика;
- аналитические выражения для передаточных функций синфазной и квадратурной составляющих вторичных колебаний, а также методики их получения.
Практическая ценность. В ходе выполнения работы получены следующие результаты, имеющие практическую ценность:
1. Разработаны структурные схемы и алгоритмы работы регуляторов системы возбуждения первичных колебаний, реализующие принципы автогенерации и фазовой автоподстройки частот (ФАПЧ) опорного генератора, со стабилизацией амплитуды колебаний угла или кинетического момента ЧЭ ММГ.
2. Разработана структурная схема регулятора с широтно-импульсной модуляцией (ШИМ) для возбуждения и стабилизации параметров первичных колебаний.
3. Разработаны структурные схемы регуляторов для демпфирования вторичных колебаний ЧЭ ММГ.
4. Разработаны структурная схема и алгоритм регуляторов системы совмещения частот первичных и вторичных колебаний на базе фазового детектора, а также система компенсации кориолисова момента в режиме совмещенных частот.
Достоверность научных и практических результатов подтверждается:
- использованием корректных математических приемов, сопоставлением аналитических результатов, данных, полученных в ходе математического моделирования и экспериментальных исследований;
- прохождением экспертизы в Российском анетстве по патентам и товарным знакам и положительным решением на выдачу патента на систему управления по оси вторичных колебаний и сертификата Роспатента на программу автоматического расчета системы управления по оси первичных колебаний ММГ “Микродрайвер”;
- критическим обсуждением результатов работы на научно-технических конференциях.
Внедрение результатов:
- синтезированная система управления первичными колебаниями (автогенераторная схема с астатической системой стабилизации амплитуды и пороговым включателем) реализована в изделиях “ММГ-1”, “ММГ-2”, “Микронавигация-1”;
- синтезированная система управления вторичными колебаниями (с демпфированием вторичных колебаний) реализована в изделиях “ММГ-1”, “ММГ-2”, “Микронавигация-1”;
- разработанные алгоритмы возбуждения и стабилизации первичных колебаний используются в стендовом испытательном оборудовании, на котором осуществляется входной контроль ЧЭ микромеханических датчиков и определяются их конструктивные параметры: зазоры, собственные частоты, добротности, нелинейности резонансных характеристик, смещения нуля, соотношение синфазных и квадратурных моментов и их амплитуда.
На защиту выносятся следующие основные положения:
1. Математическая модель ММГ роторного типа, учитывающая влияние моментов тяжения со стороны электромеханических элементов конструкции.
2. Классификация систем управления первичными колебаниями ММГ по ряду классификационных признаков, обобщающая доступную информацию по различным схемам систем управления ММГ.
3. Математические модели динамики амплитуды первичных колебаний и огибающих синфазной и квадратурной составляющих колебаний ММГ по оси вторичных колебаний и методики их получения.
4. Методики синтеза и структуры систем управления ММГ по оси первичных колебаний на основе амплитудных моделей, реализующих принципы автогенерации или ФАПЧ опорного генератора, со стабилизацией параметров колебаний, амплитудным и ШИМ регуляторами.
5. Методики синтеза и структуры систем управления вторичными колебаниями ММГ компенсационного типа, основанные на моделях огибающих синфазной и квадратурной составляющих колебаний с использованием амплитудных и фазовых детекторов в контуре совмещения частот.
Апробация работы и публикации. По теме диссертации имеется 18 опубликованных работ, из них 4 статьи в научно-технических журналах, рекомендуемых ВАК, 9 докладов на конференциях, 3 доклада на международных конференциях, 1 на отраслевых конференциях, 1 авторских свидетельства и 1 решение о выдаче патента.
Структура и объем работы. Диссертация состоит из введения, четырех глав, заключения, списка использованной литературы. Общий объем диссертации составляет 161 страницу, в тексте имеется 79 рисунков и 10 таблиц.
ОСНОВНОЕ СОДЕРЖАНИЕ РАБОТЫ
Во Введении обосновывается актуальность темы диссертации, формулируются цель и задачи исследования, а также основные положения, выносимые на защиту, дается краткий обзор содержания диссертации по главам. Также во введении приводится анализ современного уровня развития в области микромеханических датчиков.
В первой главе уточняется математическая модель ММГ роторного разработки ФГУП “ЦНИИ “Электроприбор””. Конструкция чувствительного элемента ММГ содержит: ротор, датчики угла первичных и вторичных колебаний, электростатический привод, датчик момента. Диаметр ротора 3 мм, зазоры в конструкциях датчиков угла и момента 2 мкм, добротности колебаний по осям первичных и вторичных колебаний составляют порядка 105 и 104, соответственно.
Анализ конструкции позволил уточнить влияние моментов электростатического тяжения на момент, развиваемый датчиком момента. Показано, что в первом приближении для малых углов отклонения ротора справедливо записать:
![]()
![]() , (1)
, (1)
![]() ,
,
![]() ,
,
![]() ,
,
![]() (x – “ДМ”, “ДУ1”, “ДУ2”).
(x – “ДМ”, “ДУ1”, “ДУ2”).
![]() ,
,
![]() .
.
где: ![]() - момент датчика момента по оси вторичных колебаний;
- момент датчика момента по оси вторичных колебаний; ![]() - угол отклонения ротора по оси вторичных колебаний;
- угол отклонения ротора по оси вторичных колебаний; ![]() - коэффициент датчика момента;
- коэффициент датчика момента; ![]() ,
, ![]() - коэффициенты, описывающие геометрию датчика угла;
- коэффициенты, описывающие геометрию датчика угла; ![]() - конструктивный параметр;
- конструктивный параметр; ![]() - средние радиусы от центра подвеса ротора до обкладок датчиков угла и момента;
- средние радиусы от центра подвеса ротора до обкладок датчиков угла и момента; ![]() - зазор между обкладками датчиков и ротора ММГ;
- зазор между обкладками датчиков и ротора ММГ; ![]() - напряжение на роторе;
- напряжение на роторе; ![]() ,
, ![]() - разность потенциалов между обкладками датчика момента и ротором;
- разность потенциалов между обкладками датчика момента и ротором; ![]() ,
, ![]() - напряжения на обкладках датчика момента;
- напряжения на обкладках датчика момента; ![]() - составляющая момента, не зависящая от угла отклонения ротора;
- составляющая момента, не зависящая от угла отклонения ротора; ![]() ,
, ![]() - составляющие момента, возникающие при отклонении ротора на угол
- составляющие момента, возникающие при отклонении ротора на угол ![]() .
.
Слагаемое ![]() является моментом электростатического тяжения, возникающим при наличии разности потенциалов между обкладками датчика угла и момента и ротором, влияющим на жесткость механической системы. Анализ показал, что данный момент входит в уравнения динамики ротора по оси вторичных колебаний в виде положительной обратной связи, коэффициент которой пропорционален углу отклонения ротора относительно данной оси. Снизить влияние данного момента можно, оптимизировав схему съема показаний ММГ или реализовав компенсационный режим измерения датчика, при котором отклонения ротора от оси вторичных колебаний незначительны.
является моментом электростатического тяжения, возникающим при наличии разности потенциалов между обкладками датчика угла и момента и ротором, влияющим на жесткость механической системы. Анализ показал, что данный момент входит в уравнения динамики ротора по оси вторичных колебаний в виде положительной обратной связи, коэффициент которой пропорционален углу отклонения ротора относительно данной оси. Снизить влияние данного момента можно, оптимизировав схему съема показаний ММГ или реализовав компенсационный режим измерения датчика, при котором отклонения ротора от оси вторичных колебаний незначительны.
По оси первичных колебаний моменты электростатического тяжения со стороны датчиков угла и электростатического привода не возникает, что обусловлено симметричностью конструкции и схемой включения обкладок.
Также анализ математической модели при наличии первичных колебаний собственной частоты позволил сгруппировать моменты, действующие на ротор по оси вторичных колебаний по следующим признакам:
- моменты синфазные с углом первичных колебаний;
- моменты квадратурные (имеющие сдвиг на 900) по отношению к углу первичных колебаний;
- прочие моменты.
Наибольшее влияние на характеристики датчика (коэффициент преобразования и смещение нуля) оказывают моменты, модулированные частотой первичных колебаний, действующие на ось вторичных колебаний. При этом полезный момент сил Кориолиса является квадратурным по отношению к первичным колебаниям, паразитные моменты могут иметь как синфазную, так и квадратурную составляющую, а суммарный момент ![]() представляется в виде:
представляется в виде:
![]() ,
,
![]() ,
,
 ,
,
где: ![]() - суммарный квадратурный момент, действующий на ротор ММГ по оси вторичных колебаний за исключением момента Кориолиса;
- суммарный квадратурный момент, действующий на ротор ММГ по оси вторичных колебаний за исключением момента Кориолиса; ![]() - момент Кориолиса;
- момент Кориолиса; ![]() - суммарный синфазный момент;
- суммарный синфазный момент; ![]() - частота первичных колебаний;
- частота первичных колебаний; ![]() - амплитуда суммарного момента;
- амплитуда суммарного момента; ![]() - фаза суммарного момента.
- фаза суммарного момента.
Анализ влияния расстройки частот первичных и вторичных колебаний на коэффициент преобразования ММГ показал, что при больших расстройках частот большая часть полезной составляющей содержится в квадратурной составляющей выходного сигнала. При совмещении частот полезная составляющая содержится в синфазной составляющей выходного сигнала (рис.1). Наименование составляющей соответствует фазе опорного сигнала по отношению к угловым колебаниям ротора по оси первичных колебаний, используемого для ее выделения в синхронном демодуляторе. Соответственно, в приборах с разнесенными частотами для выделения полезной составляющей необходимо использовать опорный сигнал, квадратурный первичным колебаниям, а в приборах с совмещенными частотами - синфазный. Характер полученных зависимостей несколько изменяется при наличии паразитных моментов ![]() и
и ![]() . При этом дополнительным негативным фактором является возникновение зависимости не только амплитуды вторичных колебаний от действующей на прибор угловой скорости, но и их фазы. Данный аналитический вывод подтверждается результатами моделирования и полученными экспериментальными данными. Введение обратных связей при этом может приводить к неустойчивым режимам при больших измеряемых скоростях. Снижение влияния данного негативного фактора возможно за счет усовершенствования конструкции, повышения точности ее изготовления, лазерной или электрической балансировки ротора ММГ.
. При этом дополнительным негативным фактором является возникновение зависимости не только амплитуды вторичных колебаний от действующей на прибор угловой скорости, но и их фазы. Данный аналитический вывод подтверждается результатами моделирования и полученными экспериментальными данными. Введение обратных связей при этом может приводить к неустойчивым режимам при больших измеряемых скоростях. Снижение влияния данного негативного фактора возможно за счет усовершенствования конструкции, повышения точности ее изготовления, лазерной или электрической балансировки ротора ММГ.
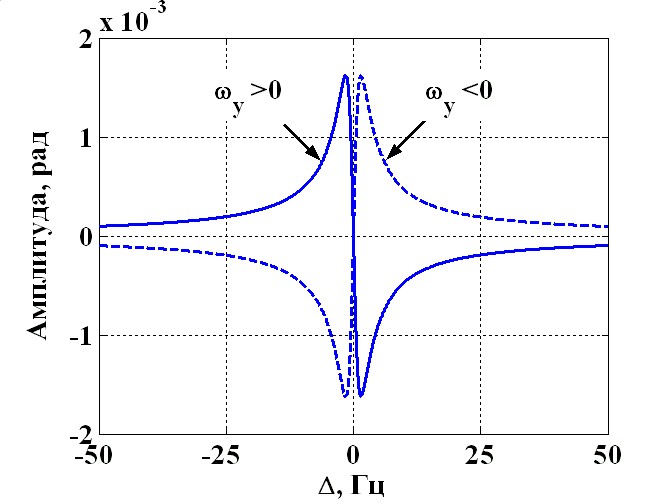
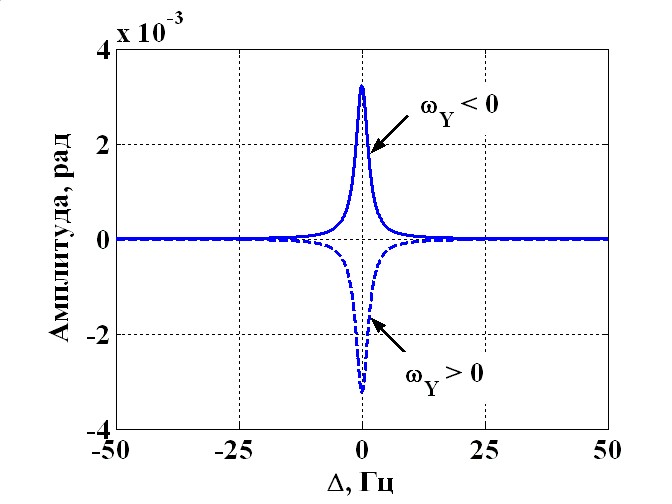
а) б)
Рисунок 1 – Зависимости синфазной (а) и квадратурной (б) составляющей от разности частот вторичных и первичных колебаний
Во второй главе исследуются методы возбуждения и стабилизации параметров первичных колебаний ротора ММГ и разрабатывается система управления первичными колебаниями.
Задачей системы управления первичными колебаниями является создание устойчивых первичных колебаний с высокой стабильностью параметров (амплитуды угла или угловой скорости) и выработка опорных сигналов для системы управления вторичными колебаниями.
Проведенный анализ отечественных и зарубежных работ позволил составить классификацию систем управления первичными колебаниями по используемым методам возбуждения и стабилизации первичных колебаний, методам формирования управляющих моментов и их аппаратной реализации.
Задача создания устойчивых первичных колебаний имеет две составляющие: возбуждение первичных колебаний на собственной частоте ротора ЧЭ по оси первичных колебаний и стабилизацию их амплитуды.
В работе исследованы методы возбуждения первичных колебаний с использованием принципов автогенерации и ФАПЧ опорного генератора, составлены структурные схемы соответствующих систем возбуждения. Результаты исследования показали, что автогенераторная схема возбуждения менее чувствительна к разбросам параметров и шумам ММГ и соответственно более надежна, чем схема с опорным генератором и ФАПЧ. Однако последняя вырабатывает более “чистые” опорные сигналы для управления датчиком и демодулятора, при помощи которого формируется выходной сигнал ММГ.
Для синтеза системы стабилизации первичных колебаний в диссертации разработан методика, использующая амплитудную модель динамики первичных колебаний. В работе показано, что при возбуждении первичных колебаний на собственной частоте одним из методов, рассмотренных выше, динамика параметров первичных колебаний описывается передаточной функцией вида:
![]() , (2)
, (2)
где: ![]() – для системы стабилизации амплитуды угла первичных колебаний;
– для системы стабилизации амплитуды угла первичных колебаний; ![]() – для системы стабилизации амплитуды угловой скорости первичных колебаний или кинетического момента ротора ММГ,
– для системы стабилизации амплитуды угловой скорости первичных колебаний или кинетического момента ротора ММГ, ![]() - конструктивный параметр.
- конструктивный параметр.
Систему стабилизации кинетического момента целесообразно использовать при серийном изготовлении, т.к. она улучшает стабилизацию характеристик датчиков от образца к образцу.
Также в работе предложен новый метод управления ММГ по оси первичных колебаний с использованием ШИМ регулятора. Преимуществом метода является то, что при его реализации в цифровом виде снижаются требования к аппаратной части. К недостаткам - высокие требования к частоте дискретизации (или такту) и импульсный характер работы схемы, что может оказывать влияние на электромагнитную совместимость системы управления первичными колебаниями с остальными блоками управления ММГ.
Структурные схемы регуляторов автогенераторной системы управления первичными колебаниями и системы с ШИМ в виде Simulink-моделей приведены на рис. 2 и 3 соответственно.
Проведенное полунатурное моделирование показало удовлетворительные результаты работы разработанных схем.
Алгоритм автогенераторной системы управления первичными колебаниями ММГ внедрен в изделия “ММГ-1”, “ММГ-2”, и “Микронавигация-2”.
Рассмотренные схемы могут использоваться и для ММГ, отличного от RR-типа.
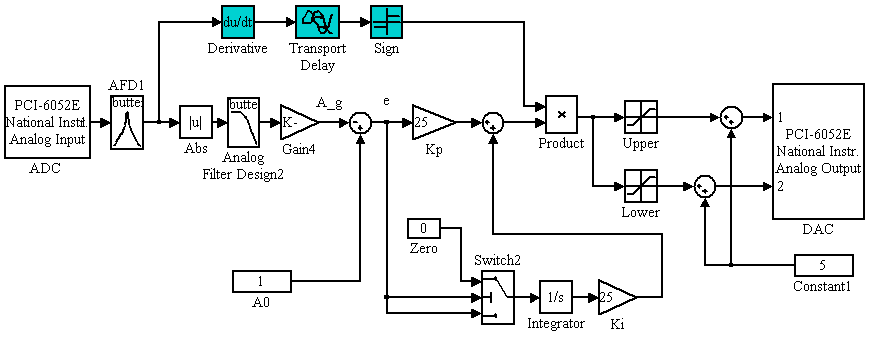
Рисунок 2 – Структурная схема регулятора автогенераторной системы управления первичными колебаниями ММГ
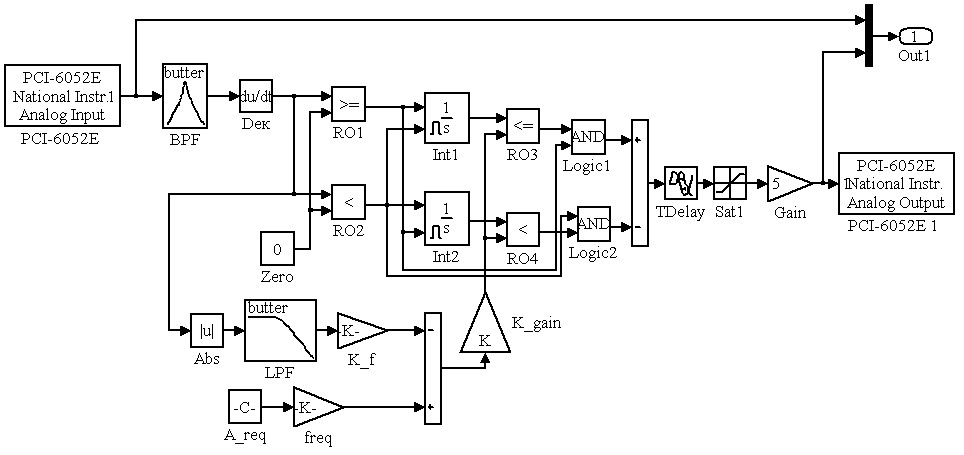

Рисунок 3 – Структурная схема ШИМ регулятора автогенераторной системы управления первичными колебаниями ММГ
В третьей главе исследуются методы управления вторичными колебаниями при помощи позиционного управления, управления по скорости, и управления фазными составляющими, с целью улучшения характеристик ММГ прямого и компенсационного типа измерения.
В диссертации решены следующие задачи управления вторичными колебаниями:
- управление частотой вторичных колебаний;
- демпфирование вторичных колебаний;
- реализация компенсационного режима измерения.
Разработана и исследована система управления на базе позиционной обратной связи, позволяющая управлять частотой вторичных колебаний ЧЭ ММГ. Исследования показали, что использование данного типа обратной связи при реализации ММГ компенсационного типа не позволяют повысить точность ММГ, однако потенциально повышают линейность выходной характеристики датчика.
Разработана и исследована система управления на базе демпфирующей обратной связи. Демпфирование вторичных колебаний – важная задача в ММГ. Высокая добротность датчика по оси вторичных колебаний, неравножесткость конструкции и технологические погрешности делают его чувствительным к механическим ударам и вибрациям, снижая его устойчивость к механическим воздействиям. Разработанная система управления позволяет повысить устойчивость ММГ к ударам до 120g и вибрациям с СКО до 7g в полосе до 400 Гц.
При разработке системы управления ММГ компенсационного типа измерения в диссертации разработана методика синтеза системы управления на базе моделей динамики синфазной и квадратурной огибающих вторичных колебаний. На основе анализа влияния на динамику ротора управляющих моментов и моментов внешних сил в диссертации получены математические модели синфазной и квадратурной огибающей в ММГ роторного типа, соответственно:
 ;
;
 ,
,
где: k – параметры, рассчитываемые по методике, изложенной в диссертации; ![]() – частота колебаний огибающей, рад/с;
– частота колебаний огибающей, рад/с; 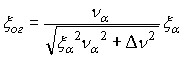 – декремент затухания;
– декремент затухания; ![]() – управление квадратурной составляющей;
– управление квадратурной составляющей; ![]() – управление синфазной составляющей;
– управление синфазной составляющей; ![]() – амплитуда синфазной составляющей;
– амплитуда синфазной составляющей; ![]() – амплитуда квадратурной составляющей.
– амплитуда квадратурной составляющей.
Использование данных моделей позволило упростить синтез системы управления ММГ по оси вторичных колебаний. Из решений, полученных в первой главе, следует, что квадратурная составляющая при резонансной настройке обращается в ноль, что может использоваться в качестве критерия настройки частоты в резонанс. Однако для работы такой системы требуется исключение технологических погрешностей, приводящих к появлению квадратурного момента.
Также в диссертации рассмотрен новый подход к решению задачи совмещения частот. Для этого разработана и исследована система управления частотой на базе фазового детектора, определяющего текущее разнесение частот, и регулятора, вырабатывающего сигнал, необходимый для их совмещения или обеспечения требуемого разнесения частот.
Введение дополнительной обратной связи превращает прибор в измеритель компенсационного типа. Для расчета регулятора обратной связи используется модель огибающей синфазной составляющей. Регулятор, обеспечивающий достижение требуемых динамических характеристик, может быть синтезирован по виду желаемой ЛАХ системы или динамическим характеристикам, обеспечивая сохранение максимальной чувствительности в заданной полосе частот. Указанный результат подтверждается математическим моделированием в среде Matlab. На рис.4 приведена соответствующая структурная схема ММГ компенсационного типа, работающего в режиме совмещенных частот.
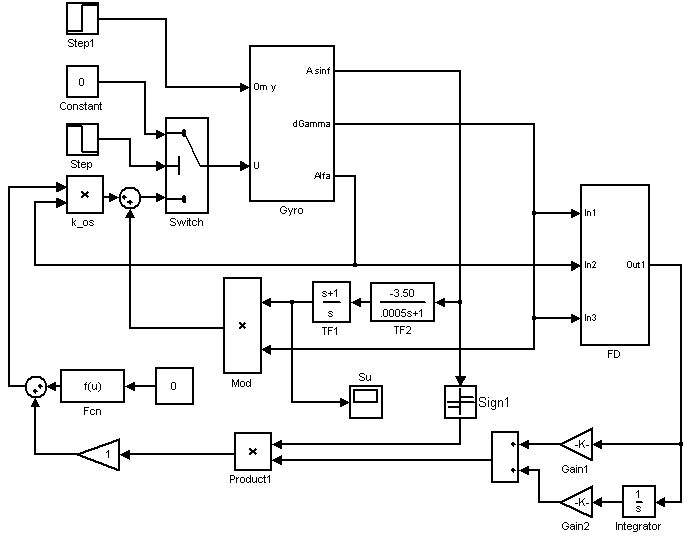
Рисунок 4 – Модель ММГ компенсационного типа в режиме совмещенных частот
Исследование разработанных систем управления ММГ показало эффективность предложенных методов управления вторичными колебаниями ММГ.
В четвертой главе приводятся экспериментальные результаты, подтверждающие выводы предыдущих глав в части уточнения модели, анализа динамики вторичных колебаний ротора ММГ, а также результаты работы систем управления первичными и вторичными колебаниями в экспериментальном образце изделия “ММГ-2” (см. рис.5). В изделии используются цифровые процессоры, в которых реализованы системы управления первичными и вторичными колебаниями и системы обработки и коррекции выходного сигнала. Обосновывается структура цифровой системы, дается ее описание и характеристики ее узлов. Анализ работы изделия подтверждает эффективность разработанных систем управления.
Рисунок 5 – Внешний вид датчика
В таблице 1 приведены достигнутые характеристики датчика, часть из которых поддается настройке за счет цифровой коррекции. Физически диапазон измерения ММГ может достигать +/-1000 0/с. В зависимости от требований заказчика цифровым способом может осуществляться подстройка диапазона измерения в пределах физически реализуемого, масштабный коэффициент и полоса пропускания датчика.
Таблица 1 – Характеристики датчика
| № | Параметр | Значение |
| 1 | Диапазон измерения, 0/с | +/- 50 |
| 2 | Коэффициент преобразования, мВ/0/с | 20 |
| 3 | Нелинейность, % | 1 |
| 4 | Полоса пропускания, Гц | 40 |
| 5 | Плотность мощности шума, 0/с/Гц | 0,05 |
| 6 | Напряжение питания, В | 5 |
| 7 | Потребляемая мощность, Вт | 0,6 |
ЗАКЛЮЧЕНИЕ
Основные результаты диссертации формулируются следующим образом.
1. Разработана и исследована математическая модель ММГ роторного типа, учитывающая влияние моментов электростатического тяжения со стороны электромеханических элементов конструкции.
2. Разработаны математические модели динамики амплитуды первичных колебаний и огибающих синфазной и квадратурной составляющих колебаний ММГ по оси вторичных колебаний, а также методики их получения.
3. Разработаны и исследованы методики синтеза и структуры систем управления ММГ по оси первичных колебаний на основе амплитудных моделей, реализующих принципы автогенерации или ФАПЧ опорного генератора, со стабилизацией параметров колебаний, амплитудным и ШИМ регуляторами.
4. Разработаны и исследованы методики синтеза и структуры систем управления вторичными колебаниями ММГ компенсационного типа, основанные на моделях огибающих синфазной и квадратурной составляющих колебаний с использованием амплитудных и фазовых детекторов в контуре совмещения частот.
5. Разработана система демпфирования вторичных колебаний ММГ, повышающая устойчивость ММГ к внешним механическим воздействиям.
6. Проведена апробация алгоритмов управления первичными и вторичными колебаниями ЧЭ, в изделиях ФГУП “ЦНИИ “Электроприбор””: “ММГ-1”, “ММГ-2”, “Микронавигация-1”.
ОПУБЛИКОВАННЫЕ РАБОТЫ ПО ТЕМЕ ДИССЕРТАЦИИ
- Ковалев А.С., Шадрин Ю.В. Исследование схем возбуждения первичных колебаний ротора микромеханического гироскопа в режиме автогенерации. // Навигация и управление движением. – Сборник докладов V конференции молодых ученых. – СПб.: ГНЦ РФ – ЦНИИ «Электроприбор», 2004, - стр.87-92.
- Ковалев А.С. Исследование возможности применения пакета программ CoventorWare в задаче проектирования микромеханического гироскопа. // Навигация и управление движением. – Сборник докладов VI конференции молодых ученых. – СПб.: ГНЦ РФ – ЦНИИ «Электроприбор», 2005, стр.170-176
- Ковалев А.С., Шадрин Ю.В. Оценка резонансных частот упругого подвеса микромеханического гироскопа в условиях наличия дополнительных электрических связей. // Навигация и управление движением. – Сборник докладов VI конференции молодых ученых. – СПб.: ГНЦ РФ – ЦНИИ «Электроприбор», 2005, стр.176-181.
- Ковалев А.С., Евстифеев М.И, Унтилов А.А, Шадрин Ю.В. Исследование влияния нелинейной жесткости на характеристики вибрационного микромеханического гироскопа. // Микросистемная техника МСТ-2004, Материалы научной молодежной школы, СПб-Таганрог, 2004, стр. 85-94.
- Ковалев А.С., Евстифеев М.И, Унтилов А.А, Шадрин Ю.В. Оценка нелинейной жесткости упругого подвеса микромеханического гироскопа // Гироскопия и навигация. – СПб.: ГНЦ РФ – ЦНИИ "Электроприбор", №4, 2004, с.65.
- Ковалев А.С., Лычев Д.И., Шадрин Ю.В. Результаты экспериментального исследования характеристик микромеханического гироскопа при совмещении резонансных частот // Навигация и управление движением. – Сборник докладов VIII конференции молодых ученых. – СПб.: ГНЦ РФ – ЦНИИ «Электроприбор», 2006, стр.158-163.
- Ковалев А.С., Евстифеев М.И, Унтилов А.А, Шадрин Ю.В. Анализ характеристик микромеханического гироскопа с нелинейной жесткостью подвеса// Известия ТРТУ № 9. Тематический выпуск. – Таганрог: Изд-во ТРТУ, 2004, стр.204-209.
- Ковалев А.С., Грязин Д.Г., Лычев Д.И., Шадрин Ю.В. К вопросу построения контура обратной связи микромеханического гироскопа // РАН. Научное приборостроение, 2007 г. том.17, выпуск 1, cтр.91-97.
- Ковалев А.С., Грязин Д.Г., Лычев Д.И., Шадрин Ю.В. Исследование режима функционирования микромеханического гироскопа с совмещенными частотами по осям первичных и вторичных колебаний. РАН // Научное приборостроение, том.17, выпуск 2, 2007 г, стр.48-53.
- Ковалев А.С. Исследование возможности применения пакета программ CoventorWare в задаче проектирования микромеханического гироскопа // Навигация и управление движением. – Сборник докладов VI конференции молодых ученых. – СПб.: ГНЦ РФ – ЦНИИ «Электроприбор», 2005, стр.170-176.
- Ковалев А.С. Панферов А.И. К вопросу о применении специализированной САПР МЭМС Coventor на отечественных предприятиях // III Международный симпозиум "Аэрокосмические технологии". - Материалы симпозиумаю – СПб.: ГУАП 2004, стр.304-306
- Баженов А.Г., Грязин Д.Г., Евстифеев М.И., Беляев Я.И., Молотков Д.Г., Ковалев А.С., Розенцвейн Д.В., Унтилов А.А., Шадрин Ю.В. Специализированный программный комплекс проектирования микромеханических инерциальных датчиков // Гироскопия и навигация. – СПб.: ГНЦ РФ – ЦНИИ "Электроприбор", №3, 2007, стр.52-62.
- Ковалев А.С. Лычев Д.И., Шадрин Ю.В. Программно- аппаратный комплекс для автоматизированного контроля параметров вибрационных микромеханических гироскопов. // Гироскопия и навигация. – СПб.: ГНЦ РФ – ЦНИИ "Электроприбор", №1, 2005, стр.78.
- Т.А.Андреева, С.В.Багаева, А.С.Ковалев, Д.И.Лычев, Н.В.Моисеев, А.А.Унтилов, Ю.В.Шадрин, А.М.Боронахин. Цикл лабораторных работ по проектированию микромеханических гироскопов. // Гироскопия и навигация. – СПб.: ГНЦ РФ – ЦНИИ "Электроприбор", №1, 2007. стр.109.
- Ковалев А.С. Лычев Д.И., Матвеев С.И., Шадрин Ю.В. Исследование температурных погрешностей микромеханического гироскопа. // Сборник докладов IX конференции молодых ученых. – СПб.: ГНЦ РФ – ЦНИИ «Электроприбор», 2007.
- А.С.Ковалев, М.И.Евстифеев, Д.И.Лычев, А.А.Унтилов, Ю.В.Шадрин. Исследование поведения чувствительного элемента микромеханического гироскопа на вибрирующем основании. // Навигация и управление движением. – Сборник докладов VII конференции молодых ученых. – СПб.: ГНЦ РФ – ЦНИИ «Электроприбор», 2005, стр.168-174.
- Панферов А.И., Кучерков С.Г., Шадрин Ю.В., Ковалев А.С. "Микродрайвер". Свидетельство об официальной регистрации программы для ЭВМ № 2004611525, 21.06.2004.
- Северов Л.А., Пономарев В.К., Грязин Д.Г., Ковалев А.С., Шадрин Ю.В. Микромеханический гироскоп вибрационного типа. Заявка N2006115535. Решение Роспатента о выдаче патента от 04.09.2007.