

Широкодиапазонные поворотные стенды с цифровыми системами управления и навигационными приборами в качестве чувствительных элементов для контроля измерителей угловой скорости
На правах рукописи
Депутатова Екатерина Александровна
ШИРОКОДИАПАЗОННЫЕ ПОВОРОТНЫЕ СТЕНДЫ
С ЦИФРОВЫМИ СИСТЕМАМИ УПРАВЛЕНИЯ
И НАВИГАЦИОННЫМИ ПРИБОРАМИ В КАЧЕСТВЕ
ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ ДЛЯ КОНТРОЛЯ
ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ
Специальность 05.11.03 – Приборы навигации
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
кандидата технических наук
Саратов – 2012
Работа выполнена в ФГБОУ ВПО «Саратовский государственный технический университет имени Гагарина Ю.А.» и в филиале ФГУП «НПЦ АП» –
«ПО «Корпус», г. Саратов.
Научный руководитель – доктор технических наук
Калихман Дмитрий Михайлович
Официальные оппоненты: Распопов Владимир Яковлевич,
доктор технических наук, профессор,
Тульский государственный университет,
заведующий кафедрой «Приборы
управления»
Андрейченко Константин Петрович,
доктор технических наук, профессор,
Саратовский государственный
технический университет
имени Гагарина Ю.А.,
профессор кафедры «Прикладная
математика и системный анализ»
Ведущая организация – ГНЦ РФ ОАО «Концерн «ЦНИИ
«Электроприбор», г. Санкт-Петербург
Защита состоится « 11 » мая 2012 г. в 1300 часов на заседании диссертационного совета Д 212.242.04 при ФГБОУ ВПО «Саратовский государственный технический университет им. Гагарина Ю.А.» по адресу: 410054, г. Саратов, ул. Политехническая, 77, корп. 1, ауд. 319.
С диссертацией можно ознакомиться в научно-технической библиотеке ФГБОУ ВПО «Саратовский государственный технический университет им. Гагарина Ю.А.».
Автореферат разослан « 11 » апреля 2012 г.
Ученый секретарь
диссертационного совета Алешкин В.В.
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность темы диссертации. В современном точном приборостроении наземные испытания измерителей угловых скоростей и блоков на их основе требуют применения поворотных стендов, задающих с высокой точностью и стабильностью вращение с постоянной или изменяющейся по определенному закону угловой скоростью в широком диапазоне (от 0,01 до 10000°/с).
Настоящая диссертационная работа посвящена разработке новых схемотехнических решений построения широкодиапазонных поворотных стендов с цифровыми системами управления (ЦСУ), где в качестве инерциальных чувствительных элементов (ИЧЭ) применяются различные навигационные приборы, а именно измерители угловых скоростей и кажущихся ускорений. Введение ЦСУ позволит стендам выйти на новый уровень точностных характеристик, а также в случае необходимости позволит изменять динамические свойства стендов путем перепрограммирования цифровой части их регуляторов.
Целью диссертационной работы является повышение точности задания угловой скорости и улучшение динамических характеристик широкодиапазонных стендов с навигационными приборами в качестве ИЧЭ путем разработки новых схемотехнических решений построения стендов с ЦСУ.
Для достижения поставленной цели решаются следующие задачи:
- разработка схемотехнических решений построения стендов нового поколения – стендов с ЦСУ и ИЧЭ;
- синтез цифровых регуляторов систем управления стендов и ИЧЭ;
- анализ синтезированных систем в частотной и временной областях и проведение экспериментальных исследований для подтверждения правильности предлагаемых решений;
- оценка влияния помех широкодиапазонных стендов с ЦСУ;
- разработка методик и алгоритмов повышения точности задания угловых скоростей стендами нового поколения.
Методы исследования применены теоретические и экспериментальные. В теоретическом исследовании использован аппарат теории автоматического управления, методы программирования и компьютерного моделирования. Экспериментальное исследование широкодиапазонного стенда с ЦСУ производилось на филиале ФГУП «НПЦ АП» – «ПО «Корпус».
Достоверность результатов подтверждается соответствием теоретических результатов, в том числе полученных математическим моделированием, с результатами экспериментальных исследований.
Научная новизна полученных результатов заключается в следующем:
- предложены два варианта построения широкодиапазонных стендов с ЦСУ. На базе предложенных вариантов разработаны три схемотехнических решения построения стендов, защищенные патентами РФ на изобретения;
- показано, что в стендах возможна смена ИЧЭ вне зависимости от класса ИЧЭ и типа его обратной связи. Смена ИЧЭ не ведет к изменению конструкции и функциональной электроники стенда, а обеспечивается за счет подстройки коэффициентов цифровой части регулятора в ЦСУ стенда;
- получены новые алгоритмы цифровой стабилизации движений ИЧЭ и платформы стенда, обеспечивающие требуемые точностные характеристики и частотные свойства этих приборов;
- разработано программно-математическое обеспечение, реализующее математические модели погрешностей предлагаемых стендов;
- разработана методика калибровки приводного двигателя стенда, улучшающая точностные характеристики стенда.
Практическая значимость диссертационной работы заключается в том, что полученные результаты позволяют:
- повысить точность и стабильность задаваемой угловой скорости в предлагаемых схемотехнических решениях построения стендов;
- снизить энергопотребление и габаритно-массовые характеристики;
- обеспечить возможность задания широкого диапазона программных движений вращения платформы стенда, а не только постоянных по величине и направлению, либо изменяющихся по гармоническому закону;
- обеспечить возможность изменения динамических характеристик стенда и ИЧЭ путем перепрограммирования цифровой части их регуляторов без изменения конструкции и функциональной электроники;
- с введением ЦСУ ликвидировать зависимость масштабного коэффициента и полосы пропускания стенда от угловой скорости при использовании в качестве ИЧЭ акселерометров, измеряющих центростремительное ускорение.
На защиту выносятся:
- два варианта построения широкодиапазонных стендов с цифровыми системами управления, представленные тремя схемотехническими решениями с различными измерителями угловой скорости;
- новые алгоритмы цифрового управления в контурах чувствительных элементов и контурах стабилизации стендов;
- программно-математическое обеспечение, реализующее математические модели погрешностей предлагаемых стендов;
- алгоритм адаптации системы управления стенда к смене ИЧЭ;
- методика калибровки приводного двигателя стендов.
Апробация результатов. Основные результаты работы обсуждались и докладывались на VIII-XIV конференциях молодых ученых «Навигация и управление движением», XXV научно-технической конференции памяти Н.Н. Острякова, XV-XVIII Международных конференциях по интегрированным навигационным системам, IV Мультиконференции по проблемам управления (ОАО «Концерн «ЦНИИ «Электроприбор», Санкт-Петербург, 2006-2012); IV научно-технической конференции молодых работников и специалистов (ФГУП «НПЦ АП», Москва, 2010) и конференции «Математические методы в технике и технологиях» (СГТУ, Саратов, 2011).
Публикации. По теме диссертации опубликованы 23 печатные работы, из них 6 статей в журналах из перечня ВАК РФ, 3 статьи без соавторов и 3 патента РФ на изобретения.
Личный вклад автора в этих работах состоит в разработке схемотехнических решений построения стендов с ЦСУ; формировании математических моделей стендов с процессорными устройствами; синтезе цифровых регуляторов стендов, датчиков угловой скорости (ДУС) и кварцевых маятниковых акселерометров; анализе синтезированных систем; оценке влияния помех, присущих системам управления стендов; разработке программно-математического обеспечения; разработке алгоритмов и методик повышения точности задания угловой скорости стендами; проведении экспериментальных исследований.
Использование результатов. Результаты, полученные в диссертационной работе, были использованы на филиале ФГУП «НПЦ АП» –
«ПО «Корпус» в качестве опытной разработки программно-математического обеспечения при решении задач синтеза цифровых регуляторов и способов повышения точности задания угловой скорости стендами, а именно:
- принципы построения поворотных стендов и ИЧЭ с ЦСУ;
- алгоритмы реализации цифровых регуляторов в виде разностных уравнений вычисления управляющих воздействий в микроконтроллерах процессорных модулей, находящихся в цепях обратных связей приборов;
- а также методика калибровки приводного двигателя стенда.
Алгоритмы реализации цифровых регуляторов были апробированы при расчетах кварцевого маятникового акселерометра с ЦСУ и широкодиапазонного поворотного стенда с ЦСУ, имеющего ДУС и акселерометры с аналоговыми системами управления в качестве ИЧЭ.
Структура и объем диссертации. Диссертационная работа состоит из введения, пяти глав, заключения, списка источников, включающего 120 наименований, и четырех приложений. Объем пояснительной записки составляет 125 страниц, общий объем со списком источников и приложениями – 167 страниц; в работе имеются 83 рисунка и 20 таблиц.
ОСНОВНОЕ СОДЕРЖАНИЕ РАБОТЫ
Во введении обосновывается актуальность темы диссертации, формулируются основные результаты работы, выносимые на защиту.
В первой главе анализируется состояние современных испытательных стендов для контроля измерителей угловой скорости по основным техническим характеристикам. Приводится единая концепция построения стендов, разработанная д.т.н. Д.М. Калихманом.
Описывается развитие нового направления в построении поворотных стендов, в котором используются схемные и конструктивные решения, аналогичные применяемым в гиростабилизаторах, а в системе управления содержащим ИЧЭ. Рассматривается принцип действия и функциональный состав поворотного стенда с аналоговой системой управления (АСУ), где в качестве ИЧЭ применяются поплавковый датчик угловой скорости (ДУС) КХ79-060 и шесть кварцевых маятниковых акселерометров КХ67-041 разработки филиала ФГУП «НПЦ АП» – «ПО «Корпус». Стенд работает в двух режимах задания угловых скоростей: 1-й – от 0,1 до 30°/с (с управлением по сигналам ДУС и триады акселерометров, измеряющих тангенциальное ускорение точек их крепления к платформе стенда), 2-й – от 30 до 1200°/с (с управлением по сигналам двух триад акселерометров, измеряющих тангенциальное и центростремительное ускорения). Описываемый стенд используется в качестве прототипа для разработки новых схемотехнических решений построения широкодиапазонных стендов с ЦСУ.
Также в первой главе приводится обзор существующих двигателей, датчиков углов, измерителей угловых скоростей и кажущихся ускорений, которые целесообразно применять в качестве функциональных элементов в стендах нового поколения. Кроме того, описываются недостатки существующих стендов для контроля измерителей угловой скорости и обосновываются цель и задачи исследований в рамках диссертации.
Во второй главе приводится описание двух вариантов построения широкодиапазонных стендов с ЦСУ, представленные тремя схемотехническими решениями. На рис. 1 и рис. 2 приведены функциональные схемы стендов, построенные по первому варианту с различными ИЧЭ, в качестве которых используются акселерометры и измерители угловой скорости – ДУС, волоконно-оптический (ВОГ) и кольцевой лазерный гироскоп (КЛГ). На рис. 3 приведена функциональная схема стенда, построенного по второму варианту.
На рис. 1-3 введены обозначения: ИП – испытуемый прибор; УЭ – угловой энкодер; ДУ – датчик угла; ДМ – датчик момента; ИУС – измеритель угловой скорости; СЭ – сервисная электроника; БПИ – блок преобразования информации; ПЛИС – программируемая логическая интегральная схема; УМ – усилитель мощности; ПУ – предварительный усилитель; УФ – усилитель-формирователь; – угловая скорость вращения платформы стенда с закрепленными на ней элементами.
Принцип действия стендов с ЦСУ, построенных как по первому, так и по второму вариантам, заключается в следующем. От управляющего компьютера, находящегося в режиме информационного обмена с процессорным модулем, на усилитель мощности приводного двигателя поступает сигнал, пропорциональный задаваемой угловой скорости. Двигатель приводит во вращение платформу стенда с закрепленными на ней элементами. ИЧЭ реагируют на угловую скорость вращения и в процессорный модуль,
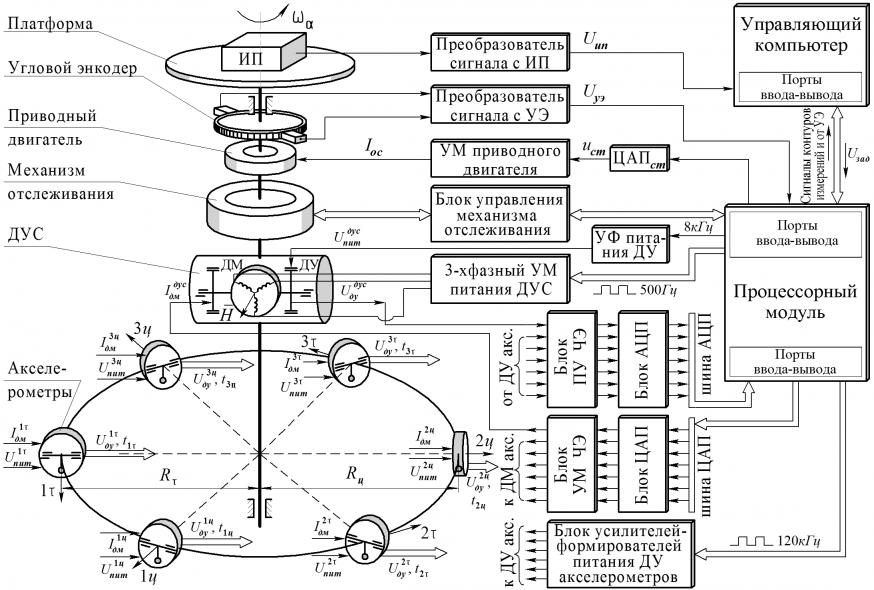
Рис. 1. Функциональная схема стенда с единой цифровой системой управления
с ДУС и акселерометрами в качестве чувствительных элементов
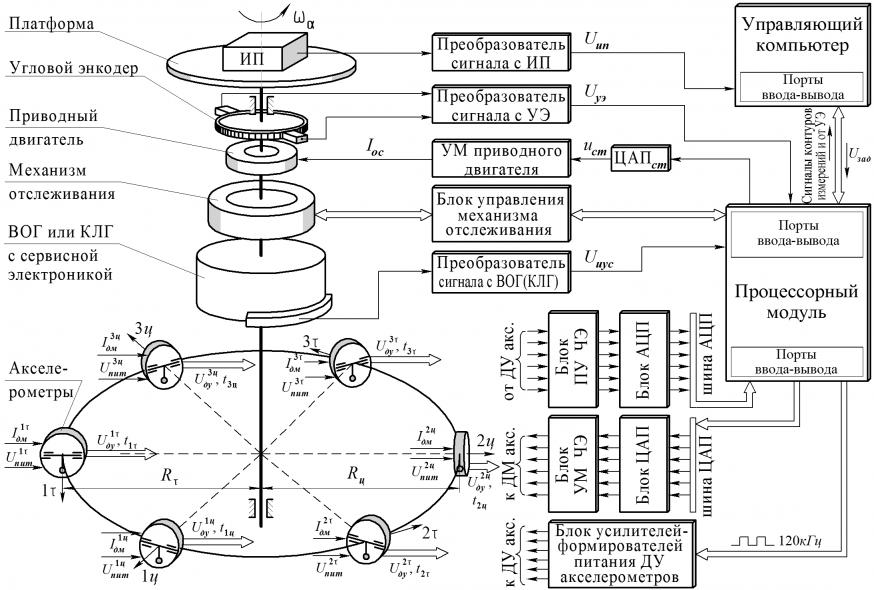
Рис. 2. Функциональная схема стенда с единой цифровой системой управления
с ВОГ (или КЛГ) и акселерометрами в качестве чувствительных элементов
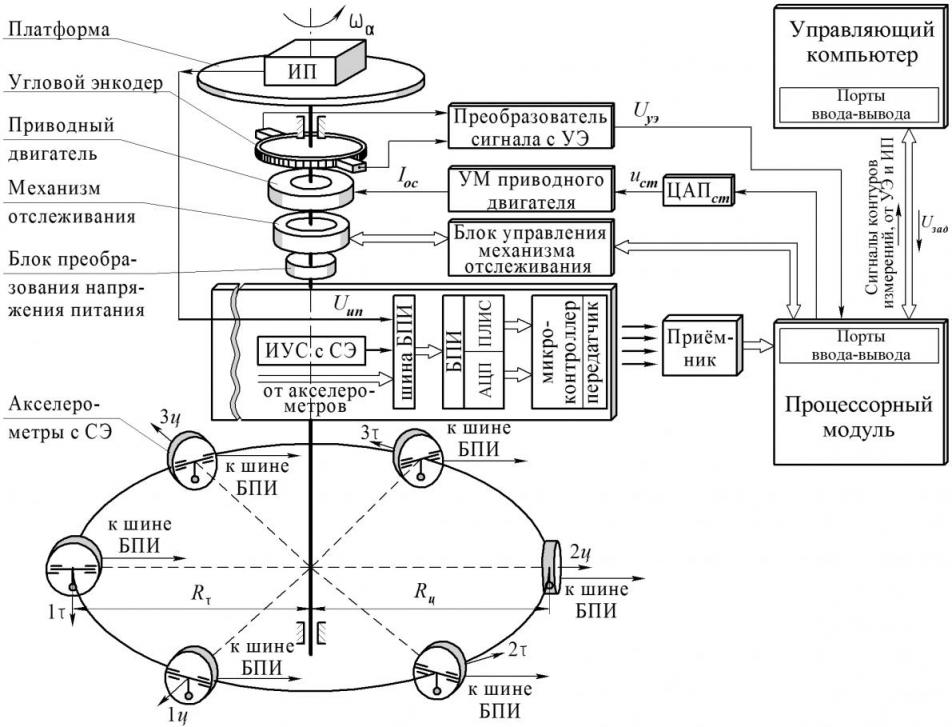
Рис. 3. Функциональная схема универсального стенда с ЦСУ
где реализованы их цифровые регуляторы, поступают сигналы, а оттуда через ЦАП эти сигналы передаются в систему управления двигателем. Калибровка статической характеристики испытуемого прибора, информация с которого через универсальный преобразователь сигнала поступает в управляющий компьютер, осуществляется путем сопоставления с информацией с ИЧЭ и с датчика угла, в качестве которого используется угловой энкодер. При этом информация с энкодера пересчитывается в угловую скорость путем деления значений угла на время, вычисленное в процессоре. Стабилизация вращения платформы стенда наступает при равенстве сигналов с управляющего компьютера и суммы сигналов с ИЧЭ. Сравнение сигналов происходит в сумматоре, алгоритмически реализованном в процессорном модуле в цепи обратной связи стенда. Также в схемотехнических решениях построения стендов применяется так называемый механизм отслеживания, разгружающий ось вращения от вредных моментов, возникающих в подшипниковых опорах и коллекторе подвода питания.
Различие вариантов построения стендов заключается в формировании ЦСУ стенда, использовании встроенных или сменных ИЧЭ, а также в организации обратной связи этих ИЧЭ.
В соответствии с первым вариантом (рис. 1) управление приводным двигателем и сигналами цепей обратных связей ИЧЭ реализуется на базе единого процессорного модуля, находящегося в системе управления стенда. Сигналы с ИЧЭ через блок предварительных усилителей и АЦП передаются в процессорный модуль, где происходит цифровая коррекция сигналов. Затем через блоки ЦАП и усилителей мощности сигналы поступают на входные каскады сервисной электроники соответствующих ИЧЭ. Кроме того, в процессоре находится модуль ШИМ-формирования для управления напряжением питания гиромотора ДУС через 3-фазный усилитель мощности и прошит алгоритм управления шаговым двигателем механизма отслеживания, а также устройство формирования разностного сигнала (сумматор) и переключения режимов работы стенда. В случае применения в качестве ИЧЭ ВОГ или КЛГ с сервисной электроникой в схему стенда (рис. 2) включается преобразователь сигнала с этого гироскопа, а в процессорном модуле производится подстройка параметров цифрового регулятора стенда к параметрам нового измерителя.
В соответствии со вторым вариантом (рис. 3) схема стенда строится как универсальная с возможностью применения различных ИЧЭ с автономными обратными связями, как аналоговыми, так и цифровыми. В управляющем процессоре реализуется цифровое управление двигателем, а также осуществляется реализация алгоритмов адаптации платформы стенда к смене ИЧЭ и алгоритмов компенсации погрешностей в случае подобной необходимости.
Преимущество реализации схемотехнических решений на основании первого варианта построения стендов с цифровыми системами управления заключается в том, что использование единого процессора в системе управления позволяет синхронизировать сигналы чувствительных элементов по частоте и более эффективно использовать алгоритмы комплексирования выходной информации для формирования сигнала управления двигателем. Реализация второго варианта построения стендов позволяет использовать в их системах управления различные классы измерителей угловой скорости и кажущегося ускорения, серийно выпускаемые промышленными предприятиями. Кроме того, появляется возможность организовать 3-й режим работы стенда с цифровым управлением от углового энкодера и акселерометров, измеряющих тангенциальное ускорение. Это позволяет расширить диапазон задания угловых скоростей до 10 000°/с и использовать стенд как миниатюрную центрифугу для контроля параметров акселерометров.
Также во второй главе приводятся функциональные схемы чувствительных элементов стенда с цифровыми системами управления: ДУС (рис. 4) и акселерометра (рис. 5). Представленные ИЧЭ рассматриваются как самостоятельные системы автоматического управления.
На рис. 4 и 5, помимо введенных ранее, приняты обозначения: ОУ – обмотка управления, ООС – обмотка обратной связи, ОВ – обмотка возбуждения, СО – сигнальная обмотка, ВИП – вторичный источник питания, ФЧВ – фазочувствительный выпрямитель, ТД – термодатчик.
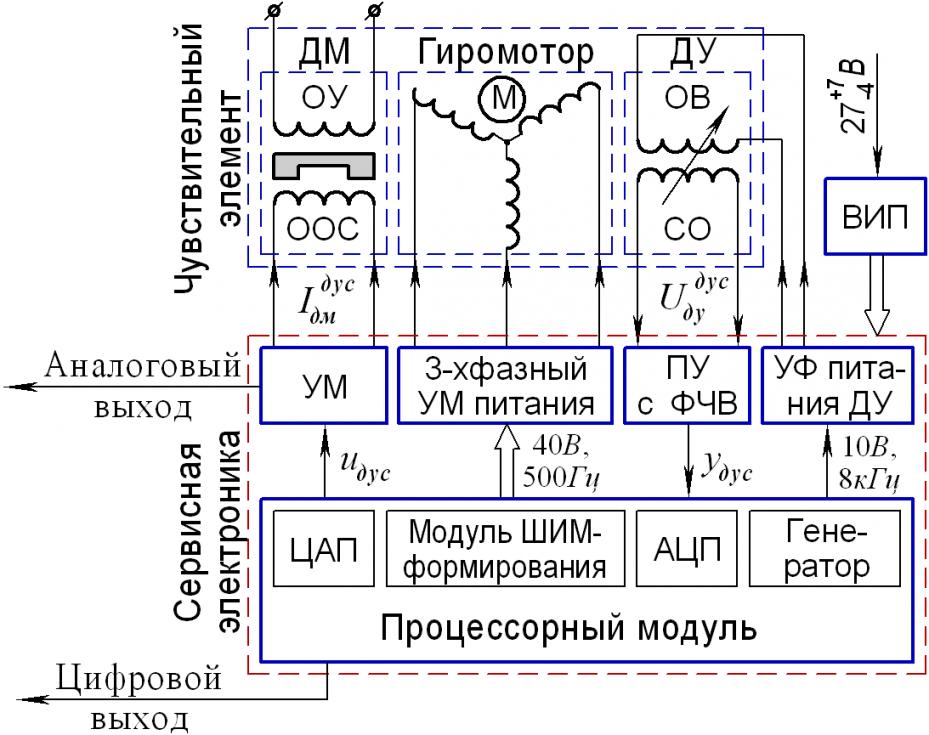
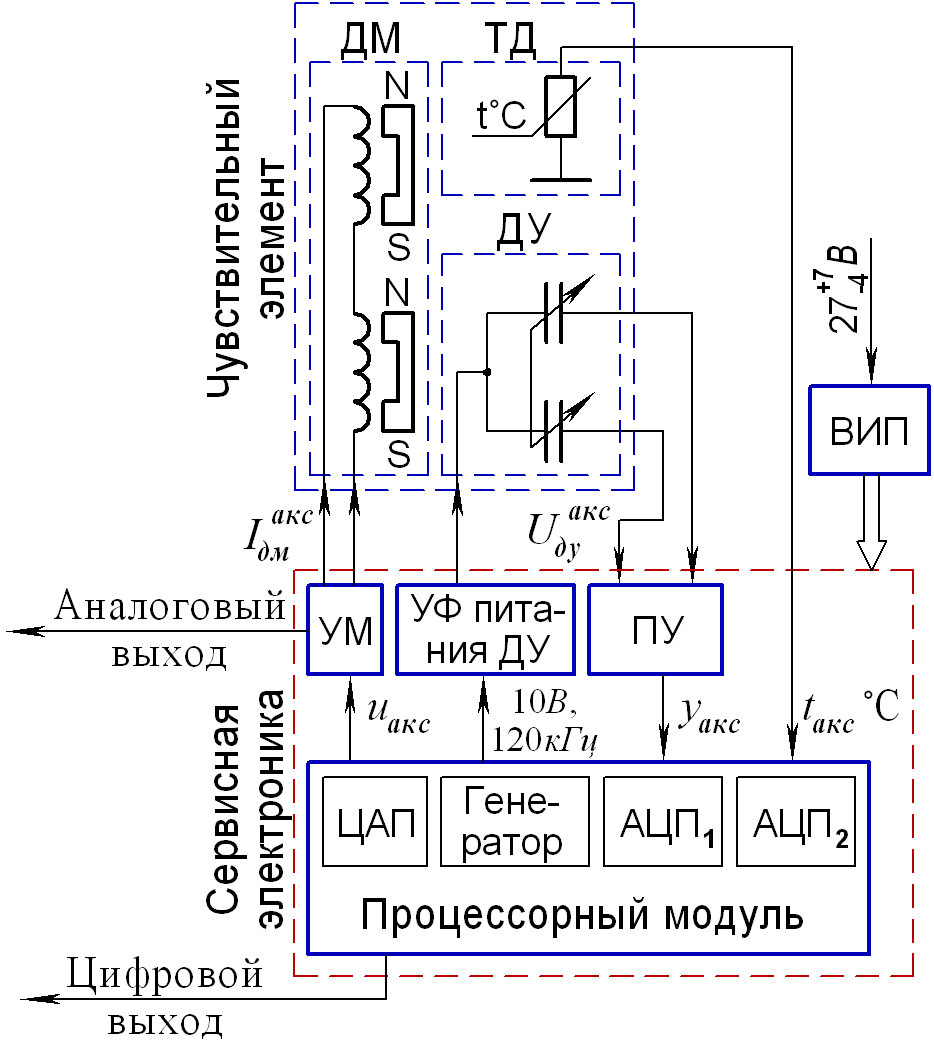
| Рис. 4. Функциональная схема ДУС с цифровой системой управления | Рис. 5. Функциональная схема акселерометра с цифровой системой управления |
В третьей главе проводится синтез и анализ цифровых регуляторов для ДУС и акселерометра в соответствии со структурными схемами на рис. 6 и 7.

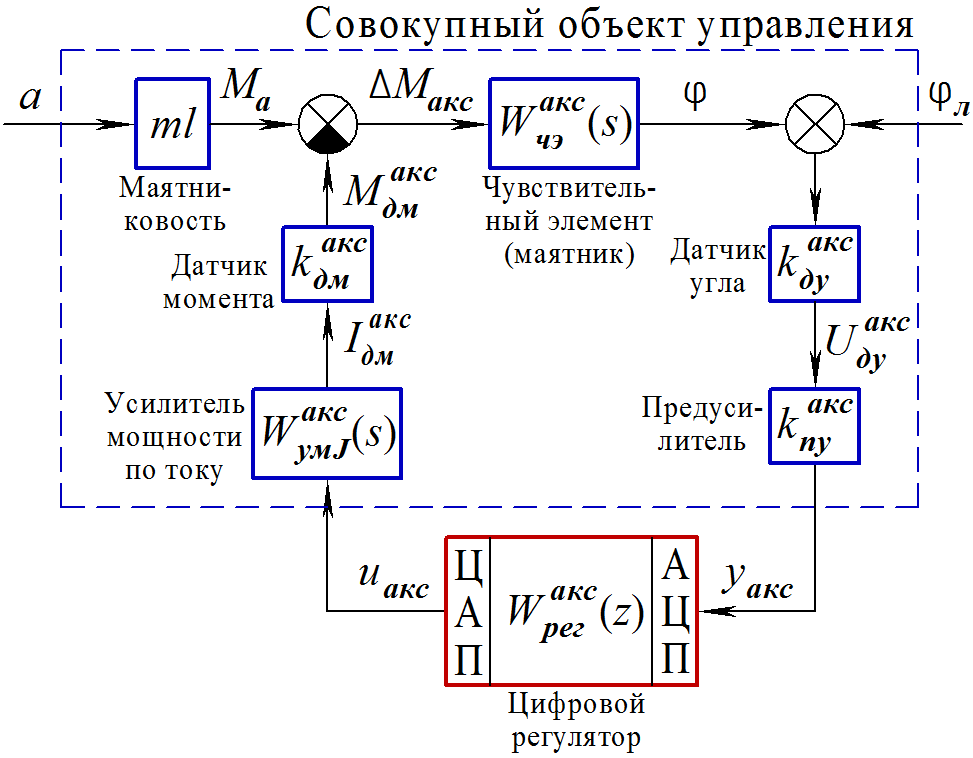
| Рис. 6. Структурная схема ДУС с цифровой системой управления | Рис. 7. Структурная схема акселерометра с цифровой системой управления |
Структурные схемы (рис. 6 и 7) состоят из функциональных блоков и описываются аппаратом передаточных функций теории автоматического управления в виде изображений по Лапласу:
 ,
,
 (1)
(1)
где числовые значения параметров приведены в табл. 1.
Методика синтеза цифровых регуляторов ДУС и акселерометра с передаточными функциями ![]() и
и ![]() основана на использовании метода линейно-квадратической дискретной оптимизации (LQD-оптимизации), цифровой фильтрации и теории наблюдающих устройств минимальной размерности типа Люенбергера. Для выбора хотя бы из двух вариантов синтез проводится для двух частот дискретизации сигналов: 2 и 10 кГц для ДУС и 10 и 30 кГц для акселерометра. Выбор частот определяется полосой пропускания этих приборов.
основана на использовании метода линейно-квадратической дискретной оптимизации (LQD-оптимизации), цифровой фильтрации и теории наблюдающих устройств минимальной размерности типа Люенбергера. Для выбора хотя бы из двух вариантов синтез проводится для двух частот дискретизации сигналов: 2 и 10 кГц для ДУС и 10 и 30 кГц для акселерометра. Выбор частот определяется полосой пропускания этих приборов.
Таблица 1. Числовые значения параметров ДУС и акселерометра
| Параметр | Величина | Параметр | Величина | Параметр | Величина |
| H, гс·см·с (Н·м·с) | 65 (6,5·10–3) | Тфчв, с | 3·10–3 | Ст, гс·см/рад (Н·м/рад) | 1,6 (1,6·10–4) |
| K | 5,4·10–3 | ||||
| J, гс·см·с2 (Н·м·с2) | 0,286 (2,86·10–5) | Тум1, с | 1,31·10–2 | k | 182 |
| Тум2, с | 8,03·10–4 | k | 1,15 | ||
| n, гс·см·с (Н·м·с) | 35 (3,5·10–3) | ml, гс·см/g (Н·м/g) | 0,15 (1,5·10–5) | k | 150 (1,5·10–2) |
| k | 8,6 | J, гс·см·с2 (Н·м·с2) | 1,2·10–4 (1,2·10–8) | k | 0,910–3 |
| k | 30 | 0,3310–3 | |||
| k | 567,2 (5,672·10–2) | n, гс·см·с (Н·м·с) | 0,05 (5·10–6) | 0,32710–4 |
Для частоты 10 кГц получены следующие передаточные функции:
 ,
,
 , (2)
, (2)
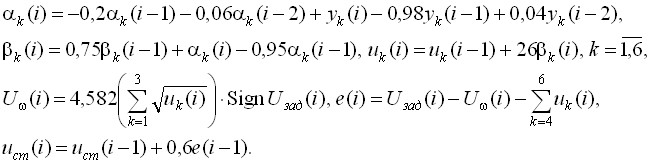
которые соответствуют следующим алгоритмам управления:
 (3)
(3)
где начальные условия, необходимые для реализации этих алгоритмов, приняты нулевыми.
Проводится численное моделирование ИЧЭ с синтезированными цифровыми регуляторами в частотной и временной областях. Результаты моделирования для ДУС и акселерометра как с цифровыми (с различными частотами дискретизации), так и с аналоговыми (для сравнения) системами управления сведены в табл. 2.
В целом для приборов с ЦСУ характеристики получились не хуже, чем у существующих приборов с аналоговыми системами управления. Кроме того, для ДУС с ЦСУ уменьшились резонансные значения угла прецессии с 1,74 до 1,20 угл.мин, а для акселерометров – уменьшились резонансные значения угла скручивания торсиона маятника с 0,7 до 0,4 угл.мин.
Таблица 2. Результаты математического моделирования ДУС и акселерометра
с аналоговыми и цифровыми системами управления
| Характеристика | Величина | |||||
| ДУС | Акселерометр | |||||
| АСУ | ЦСУ, 2 кГц | ЦСУ, 10 кГц | АСУ | ЦСУ, 10 кГц | ЦСУ, 30 кГц | |
| Запас по амплитуде, дБ | 18 | 9,5 | 10,2 | 22,4 | 17 | 19,6 |
| Запас по фазе, ° | 70 | 114 | 129 | 34,7 | 49,6 | 51,9 |
| Полоса пропускания, Гц | 20,1 | 11,6 | 11,6 | 574 | 1052 | 1052 |
| Показатель колебательности | 1,07 | 1,13 | 1,13 | 1,77 | 1,94 | 1,62 |
| Время переходного процесса, с | 0,15 | 0,1 | 0,1 | 0,005 | 0,005 | 0,002 |
| Перерегулирование, % | 5 | 10 | 10 | 45 | 36 | 30 |
Также в третьей главе для анализа работы волоконно-оптического (ВОГ) и кольцевого лазерного гироскопов (КЛГ) в качестве чувствительных элементов в широкодиапазонных стендах приводятся упрощенные математические модели этих гироскопов и рассчитываются коэффициенты передачи, а именно kвог = 7,143 B·c; kлг = 257,5 B·c, соответственно.
В четвертой главе проводится синтез цифровых регуляторов широкодиапазонных стендов с различными ИЧЭ. Синтез проводится в соответствии со структурными схемами, составленными для 1-го (рис. 8а) и 2-го (рис. 8б) режимов работы стенда. На рис. 8 для простоты не показаны внешние воздействия, кроме задающего Uзад и не учтена динамика разгрузочного устройства (kру=193,8 гсм/В) и контуров ИЧЭ, причем в случае применения в качестве измерителя угловой скорости в стенде ДУС статический коэффициент передачи kиус=kдус=3,314 Вс, для ВОГ – kиус=kвог, для КГЛ – kиус=kлг, а для акселерометров – k=kц=0,0193 Вс2. Такое упрощение является вполне оправданным, так как постоянные времени данных функциональных элементов на несколько порядков меньше постоянной времени платформы Тпл=J/n=1000/40=25 c. Кроме того, на структурной схеме стенда, работающего в 1-м режиме (рис. 8а), не отражено влияние гироскопического момента Н от ДУС на движение платформы, поскольку это влияние, как показало моделирование, оказывается достаточно малым.
Регуляторы контуров стабилизации стендов состоят из коэффициентов обратных связей k, k и передаточной функции ![]() , подлежащих определению. Кроме того, синтез регуляторов проводится таким образом, чтобы обеспечить требуемый масштабный коэффициент Kст = 3°/с/В в 1-м и Kст = 30°/с/В во 2-м режимах работы стенда, причем в существующем стенде во 2-м режиме этот коэффициент зависит от задаваемой угловой скорости и находится в диапазоне от 20 до 133°/с/В.
, подлежащих определению. Кроме того, синтез регуляторов проводится таким образом, чтобы обеспечить требуемый масштабный коэффициент Kст = 3°/с/В в 1-м и Kст = 30°/с/В во 2-м режимах работы стенда, причем в существующем стенде во 2-м режиме этот коэффициент зависит от задаваемой угловой скорости и находится в диапазоне от 20 до 133°/с/В.
Для нахождения неизвестных коэффициентов записываются выражения для ошибок контуров стабилизации в 1-м и 2-м режимах работы стенда с учетом множителя n=3, имитирующего суммирование сигналов:
 – 1-й режим, (4)
– 1-й режим, (4)
![]() – 2-й режим, (5)
– 2-й режим, (5)
где ![]() – установившееся значение угловой скорости вращения стенда.
– установившееся значение угловой скорости вращения стенда.
Регулятор контура стабилизации обеспечивает астатизм этого контура, т.е. е = 0, ![]() и при
и при ![]() из (4) k = 1/(Kстkиус), а именно для стенда с ДУС – k = 5,763, с ВОГ – k = 2,674 В, с КЛГ – k = 0,074 В·с. Аналогично для 2-го режима стенда из (5)
из (4) k = 1/(Kстkиус), а именно для стенда с ДУС – k = 5,763, с ВОГ – k = 2,674 В, с КЛГ – k = 0,074 В·с. Аналогично для 2-го режима стенда из (5) ![]() .
.
Синтез цифровых регуляторов стендов с различными ИЧЭ основан на том, что при выбранном периоде дискретности h = 10–4 c частота среза разомкнутого контура стабилизации оказывается значительно меньше частоты Найквиста N = /h. При этом с учетом достаточно простой структуры объекта управления для контура стабилизации (рис. 8) применяется метод прямой дискретизации, т.е. находится регулятор в аналоговой форме в виде ![]() (kрег – некоторый коэффициент), а цифровой определяется переводом полученного решения в дискретную форму. Тогда, исходя из желаемой частоты среза ср*=30 Гц, коэффициенты запишутся:
(kрег – некоторый коэффициент), а цифровой определяется переводом полученного решения в дискретную форму. Тогда, исходя из желаемой частоты среза ср*=30 Гц, коэффициенты запишутся:
 , (6)
, (6)
где i = 1,2 – номер режима.
С учетом числовых значений коэффициенты из (6) определятся как ![]() ,
, ![]() (при ИЧЭ ДУС, ВОГ и КЛГ),
(при ИЧЭ ДУС, ВОГ и КЛГ), ![]() ,
, ![]() .
.
Для частоты дискретизации 10 кГц получены следующие алгоритмы управления широкодиапазонного стенда:
– в 1-м режиме (с различными измерителями угловой скорости):
 (7)
(7)
– во 2-м режиме:
 (8)
(8)
Для начального момента (i=0) начальные значения: yk(–1), yk(–2), k(–1), k(–2), k(–1), e(–1) и uст(1) приняты нулевыми.
Далее в четвертой главе приводятся результаты численного моделирования стендов с синтезированными цифровыми регуляторами. Анализ характеристик стенда для обоих режимов работы в частотной области проводится по частотным характеристикам разомкнутых контуров и замкнутых систем. Характеристики рассматриваются в основной полосе частот дискретной системы, ограниченной сверху частотой Найквиста. Анализ замкнутой системы во временной области проводится по структурным схемам рис. 8. При этом задающее воздействие принимается в виде единичной функции Uзад(i) = 1(i), соответствующей изменению напряжения на 1В. Результаты моделирования для стенда в 1-м (с различными измерителями угловой скорости) и 2-м режимах работы как с цифровыми, так и аналоговыми (для сравнения) системами управления сведены в табл. 3.
Таблица 3. Результаты математического моделирования стенда
с аналоговыми и цифровыми системами управления
| Характеристика | Величина | |||||
| 1-й режим | 2-й режим | |||||
| АСУ | ЦСУ, ДУС | ЦСУ, ВОГ | ЦСУ, КЛГ | АСУ | ЦСУ | |
| Запас по амплитуде, дБ | 26,5 | 14,7 | 15 | 43 | ~ | 43 |
| Запас по фазе, ° | 42,6 | 89,9 | 72 | 82 | ~ | 66,6 |
| Полоса пропускания, Гц | 12 | 8 | 5 | 7 | ~ | 16 |
| Показатель колебательности | 1,2 | 1 | 1 | 1 | ~ | 1 |
| Масштабный коэффициент, °/с/В | 3 | 3 | 3 | 3 | ~ | 30 |
| Время переходного процесса, с | 0,1 | 0,1 | 0,1 | 0,1 | 0,3 | 0,14 |
| Перерегулирование, % | 0 | 7 | 0 | 0 | 0 | 6,7 |
Для стенда с ЦСУ качество переходных процессов вполне удовлетворительное, перерегулирование для стендов с ВОГ и КЛГ отсутствует, а частотные показатели качества оказались выше, чем в существующей аналоговой системе, и характеризуют цифровую систему стабилизации как систему с высокими робастными свойствами.
В пятой главе проводятся исследования, связанные с оценкой влияния помех в стендах с ЦСУ. В качестве помех рассматриваются моменты М (нестабильность момента сопротивления, вызываемая нестабильностью момента трения в подшипниках по оси вращения и в коллекторе подвода питания к элементам подвижной части стенда, как с механизмом отслеживания, так и без него, а также имеющего бесконтактный съем информации и без такового), М (нестабильность момента тяжения по оси прецессии поплавкового гироузла ДУС), М и Мц (моменты сопротивления по осям скручивания торсионов маятников акселерометров, измеряющих тангенциальное и центростремительное ускорения точек их крепления к платформе стенда). Момент М описывается известной моделью трения, которая учитывает эффект предварительного смещения.
По результатам математического моделирования для стендов с ЦСУ величина нестабильности задания угловой скорости меньше, чем для стенда с АСУ, причем наилучшие точностные характеристики имеет стенд с механизмом отслеживания; так, для стендов с ЦСУ в 1-м режиме работы нестабильности задания угловой скорости при использовании ДУС в качестве ИЧЭ не превышает 3,6·10–5 °/с, при ВОГ – 3,5·10–5 °/с, при КЛГ – 2,8·10–5 °/с. Во 2-м режиме работы стенда с ЦСУ нестабильности задания угловой скорости составляет 1,5·10–4 °/с.
Разработана методика повышения точности обработки выходной информации от избыточного количества измерителей стенда. Числовая реализация методики показывает, что погрешность измерения угловой скорости в 1-м режиме работы стенда с ДУС в качестве ИЧЭ может быть уменьшена до 10–5°/с, а во 2-м – до 0,58·10–4°/с.
Разработана методика повышения точности задания угловой скорости стендом путем калибровки разгрузочного устройства, содержащего датчик положения и бесконтактный двигатель. Двигатель работает по принципу синусно-косинусного вращающего трансформатора, в котором возможна неидентичность каналов, связанная с различием коэффициентов передачи этих каналов. Данный эффект наблюдается из-за дрейфа операционных усилителей, неидентичности номиналов RC-элементов и наличия нулевых сигналов в синусном и косинусном каналах. Методика реализуется путем диагностики неидентичности каналов двигателя в определенной технологической последовательности. Показывается, что без калибровки двигателя допуск на различие его каналов не должен превышать 0,1 %, чтобы не ухудшить заявленные точностные характеристики стенда.
Разработан алгоритм адаптации системы управления стенда к смене ИЧЭ. Реализация алгоритма возможна только при наличии ЦСУ стенда.
Приводятся результаты экспериментальных исследований акселерометра с ЦСУ и широкодиапазонного стенда с ЦСУ, где в качестве ИЧЭ применяются ДУС и две триады акселерометров с аналоговыми системами управления. На рис. 9 и 10 приведены результаты экспериментальных исследований стендов с ЦСУ в 1-м и 2-м режимах работы. Нестабильность задания угловой скорости вычисляется как разность измеренных и расчетных значений с учетом того, что масштабный коэффициент в 1-м режиме работы равен 3°/с/В и во 2-м – 30°/с/В.
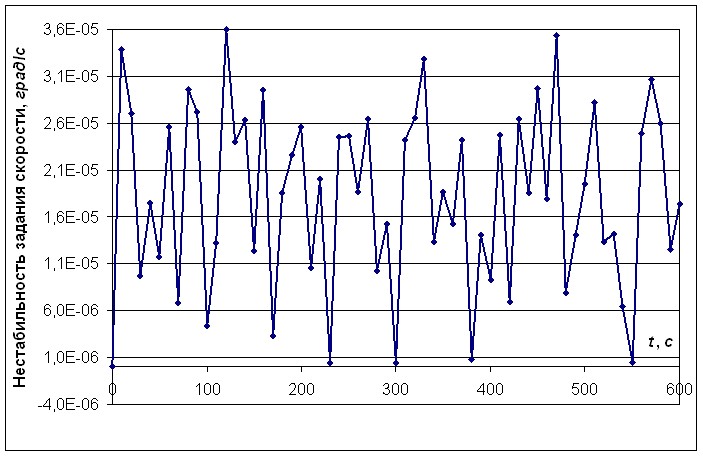
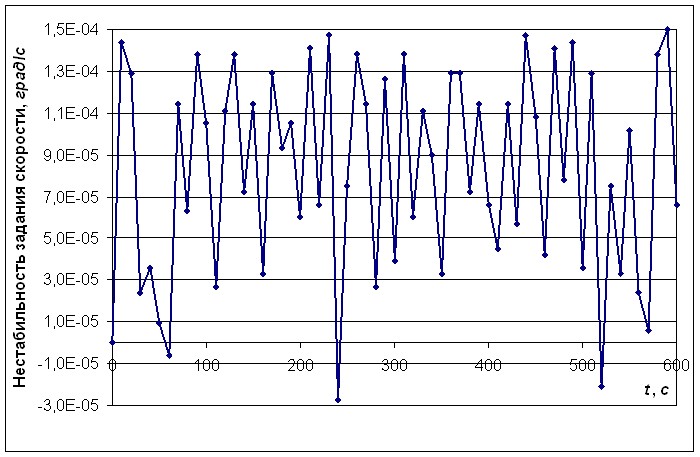
| Рис. 9. Нестабильность задания угловой скорости стенда с ЦСУ в 1-м режиме работы | Рис. 10. Нестабильность задания угловой скорости стенда с ЦСУ во 2-м режиме работы |
Проводится сопоставительный анализ с результатами математического моделирования и отладка коэффициентов цифровых регуляторов. Сопоставительный анализ подтверждает правильность принятых решений в рамках диссертации.
В приложении приводятся численные значения параметров чувствительных и функциональных элементов стенда, необходимые для моделирования; графики частотных характеристик и переходных процессов широкодиапазонных стендов с ЦСУ; графики реакций выходных сигналов широкодиапазонных стендов на возмущающие воздействия, а также тексты программ для реализации синтеза цифровых регуляторов, построения динамических характеристик исследуемых систем и реализации математические модели погрешностей стендов с ЦСУ.
ЗАКЛЮЧЕНИЕ
В рамках диссертации были получены следующие результаты:
- разработаны два варианта построения широкодиапазонных стендов с ЦСУ, в соответствии с которыми предложено три схемотехнических решения построения стендов с различными навигационными приборами в качестве ИЧЭ;
- разработаны функциональные и структурные схемы ИЧЭ и широкодиапазонных стендов с ЦСУ, построенные по блочной структуре с введением аналого-цифровых и цифро-аналоговых преобразователей;
- сформулирована задача синтеза комплексного цифрового регулятора стенда и предложен метод ее решения путем нахождения составляющих этого регулятора, представленного регуляторами измерительных контуров (контуров ИЧЭ) и регулятором контура стабилизации (контур управления приводным двигателем), для чего проведена процедура синтеза регуляторов ИЧЭ с ЦСУ на базе метода LQD-оптимизации, цифровой фильтрации и теории наблюдающих устройств минимальной размерности типа Люенбергера. Показано, что методика синтеза носит общий характер и применима к любому схемотехническому решению построения стенда, представленному в работе. Из полученных передаточных функций цифровых регуляторов сформированы алгоритмы управления для программирования их в процессорных модулях;
- проведена численная реализация систем управления ИЧЭ и широкодиапазонных стендов с ЦСУ в двух режимах работы, а также анализ всех систем в частотной и временной областях. Для ИЧЭ с ЦСУ проведено исследование влияния периода дискретности на их динамические характеристики. Кроме того, реализация цифрового регулятора стенда во 2-м режиме работы позволяет исключить нелинейность в канале управления приводным двигателем по сигналам акселерометров, измеряющих центростремительное ускорение, что ведет к установившимся динамическим характеристикам в этом скоростном диапазоне;
- проведена оценка влияния возмущающих воздействий на динамические характеристики стендов с ЦСУ, которая показала, что реакция угловой скорости на возмущающий момент по оси вращения уменьшается в 2 раза;
Таблица 4. Технические характеристики широкодиапазонных поворотных
стендов с цифровыми системами управления
| Характеристика, размерность | Величина | |||
| 1-й режим | 2-й режим | |||
| с ДУС | с ВОГ | с КЛГ | ||
| от 0,01 до 30 | от 0,01 до 80 | от 0,01 до 400 | от 30 (с ДУС), 80 (с ВОГ) или 400 (с КЛГ) до 1200 |
| 3,6·10–5 | 3,5·10–5 | 2,8·10–5 | 1,5·10–4 |
| 3 | 3 | 3 | 30 |
| 14,7 89,9 | 15 72 | 43 82 | 43 66,6 |
| 25 | 30 | 25 | 15 |
| 15 | 15 | 15 | 15 |
| 40 | 30 | 60 | 30 |
| 480 580 | 500 600 | 550 650 | 480 580 |
| 60 | 55 | 70 | 60 |
- разработана методика повышения точности задания угловой скорости стенда, заключающаяся в калибровке приводного двигателя в соответствии с предложенной технологической последовательностью;
- проведены экспериментальные исследования акселерометра и стенда с рассчитанными цифровыми регуляторами в системах управления. Проведен сопоставительный анализ с результатами математического моделирования, который позволил подтвердить правильность обозначенного подхода к разработке приборов нового поколения.
Проведенные исследования позволяют определить технические характеристики широкодиапазонных стендов с ЦСУ, работающих в двух режимах задания угловой скорости на различных ИЧЭ (табл. 4).
Существенным отличием разработанных стендов с ЦСУ является то, что появляется возможность алгоритмической компенсации погрешностей не в выходных каскадах, а в контурах управления стендов.
ПУБЛИКАЦИИ АВТОРА ПО ТЕМЕ ДИССЕРТАЦИИ
Публикации в изданиях, рекомендованных перечнем ВАК РФ
- Депутатова Е.А. Математическая модель волоконно-оптического измерителя угловой скорости средней точности / Д.М. Калихман, Е.А. Депутатова, В.И. Гребенников, В.А. Седышев, В.А. Акеев, А.А. Скрипкин // Авиационная промышленность.– 2006. –№4. – С. 33-40; 2007. – №1. – С. 32-41.
- Депутатова Е.А. О возможности создания трехстепенного имитационно-калибровочного стенда с волоконно-оптическим гироскопом в качестве инерциального чувствительного элемента по вертикальной оси вращения / Д.М. Калихман, Л.Я. Калихман, А.В. Полушкин, Е.А. Депутатова, А.А. Скрипкин // Авиационная промышленность. – 2008. №1. – С. 11-17.
- Депутатова Е.А. Математическая модель трехкомпонентного волоконно-оптического измерителя угловой скорости / Д.М. Калихман, В.И. Гребенников, Е.А. Депутатова, В.А. Седышев, А.А. Скрипкин // Авиационная промышленность. – 2008. – №4. – С. 53-58.
- Депутатова Е.А. Прецизионный стенд с датчиком угловой скорости в качестве инерциального чувствительного элемента и двухконтурной цифровой системой управления / Д.М. Калихман, Ю.В. Садомцев, А.В. Полушкин, Е.А. Депутатова, А.А. Скрипкин // Авиационная промышленность. – 2010. – №1. – С. 43-49.
- Депутатова Е.А. Способ повышения стабильности задаваемой угловой скорости в прецизионных стендах с инерциальными чувствительными элементами / Е.А. Депутатова // Труды ФГУП «НПЦ АП». Системы и приборы управления 2010. – №3(13). – С. 23-31.
- Депутатова Е.А. Цифровая стабилизация движений прецизионных управляемых оснований с инерциальными чувствительными элементами. I. Применение поплавкового измерителя угловой скорости / Е.А. Депутатова, Д.М. Калихман, А.В. Полушкин, Ю.В. Садомцев // Известия РАН. Теория и системы управления. 2011. – № 1. – С. 120-132; II. Применение поплавкового измерителя угловой скорости и маятниковых акселерометров // Известия РАН. Теория и системы управления. 2011. – № 2. – С. 131-146.
Патенты РФ
- Депутатова Е.А. Стенд для контроля измерителей угловой скорости / Д.М. Калихман, Л.Я. Калихман, Ю.В. Садомцев, А.В. Полушкин, Р.В. Ермаков, Е.А. Депутатова, С.Ф. Нахов; Патент RU № 2339912, 2008 Бюл. № 33.
- Депутатова Е.А. Широкодиапазонный стенд для контроля измерителей угловой скорости / Д.М. Калихман, Л.Я. Калихман, А.В. Полушкин, Ю.В. Садомцев, С.Ф. Нахов, Р.В. Ермаков, Е.А. Депутатова; Патент RU №2378618, 2010 Бюл. №1.
- Депутатова Е.А. Универсальный стенд для контроля прецизионных гироскопических измерителей угловой скорости / Д.М. Калихман, Л.Я. Калихман, А.В. Полушкин, Ю.В. Садомцев, С.Ф. Нахов, Р.В.Ермаков, Е.А. Депутатова, А.В. Молчанов, М.В. Чиркин, Е.А. Измайлов; Патент RU № 243538, 2010 Бюл. № 31.
Публикации в других изданиях
- Депутатова Е.А. Математическая модель прецизионного датчика угловой скорости с электрической обратной связью / Д.М. Калихман, Е.А. Депутатова // Навигация и управление движением: VIII конференция молодых ученых // Гироскопия и навигация. – 2006. – № 2. – С. 100-101.
- Депутатова Е.А. Модернизация установки «Спектр» и развитие методик контроля регистрации частот и уровней вибрации гиромоторов / Л.Я. Калихман, Д.М. Калихман, А.В. Полушкин, А.В. Михеев, Р.В. Ермаков, Е.А. Депутатова, В.А. Седышев // Гироскопия и навигация. – 2006. – №4. – С. 115-116.
- Депутатова Е.А. Математическая модель трехстепенного имитационно-калибровочного стенда для испытания гироскопических приборов / В.А. Акеев, Е.А. Депутатова // Навигация и управление движением: материалы докладов IX конференции молодых ученых «Навигация и управление движением». – СПб.: ГНЦ РФ ЦНИИ «Электроприбор», 2008. – С. 39-46.
- Депутатова Е.А. Прецизионный стенд с гироскопическим датчиком угловой скорости в качестве инерциального чувствительного элемента с цифровой системой управления / Д.М. Калихман, Л.Я. Калихман, Ю.В. Садомцев, А.В. Полушкин, Р.В. Ермаков, Е.А. Депутатова, С.Ф. Нахов // 15-я С.-Петерб. Междунар. конф. по инерциальным навигационным системам. – СПб.: Изд-во ЦНИИ «Электроприбор», 2008. – С. 169-172.
- Депутатова Е.А. Синтез цифрового регулятора прецизионного кварцевого маятникового акселерометра / Е.А. Депутатова // Навигация и управление движением: материалы докл. X конф. молодых ученых. – СПб.: ГНЦ РФ ЦНИИ «Электроприбор», 2009. – С. 309-316.
- Deputatova E.A. The precision test simulator comprising a rate gyro as an inertial sensitive element with a digital control system / D.M. Kalihman, L.Y. Kalihman, Y.V. Sadomtsev, A.V. Polushkin, E.A. Deputatova, R.V. Ermakov, S.F. Nahov, A.A. Skripkin // Bulletin of engineering academy of Ukraine, Issue 3-4. –Kyiv, 2008. – C. 15-22.
- Депутатова Е.А. От аналоговой к цифровой системе обратной связи на примере поплавкового двухстепенного гироскопа / Е.А. Депутатова, Р.В. Ермаков // Навигация и управление движением: материалы докладов XI конференции молодых ученых. – СПб.: ГНЦ РФ ЦНИИ «Электроприбор», 2010. – С. 429-436.
- Депутатова Е.А. Прецизионный широкодиапазонный стенд с инерциальными чувствительными элементами и цифровой системой управления / Д.М. Калихман, Л.Я. Калихман, Ю.В. Садомцев, А.В. Полушкин, Р.В. Ермаков, Е.А. Депутатова, С.Ф. Нахов // 16-я С.-Петерб. Междунар. конф. по инерциальным навигационным системам. – СПб.: Изд-во ЦНИИ «Электроприбор», 2009. – С. 48-53.
- Депутатова Е.А. Разработка цифрового регулятора и исследование характеристик прецизионного поплавкового ДУС КХ79-060 при различных частотах квантования сигнала и различных коэффициентах весовых матриц / Е.А. Депутатова. – Деп. в ВИНИТИ. № 394 – В 2009 – 2009. – 30 с.
- Депутатова Е.А. Универсальный стенд с цифровой системой управления для контроля измерителей угловой скорости различного принципа действия / Д.М. Калихман, Л.Я. Калихман, Ю.В. Садомцев, А.В. Полушкин, Е.А. Депутатова, Р.В. Ермаков, С.Ф. Нахов, Е.А. Измайлов, А.В. Молчанов, М.В. Чиркин // 17-я С.-Петерб. Междунар. конф. по инерциальным навигационным системам. – СПб.: Изд-во ЦНИИ «Электроприбор», 2010. – С. 147-154.
- Депутатова Е.А. Гироскопические мехатронные системы / Д.М. Калихман, Л.Я. Калихман, Ю.В. Садомцев, А.В. Полушкин, Р.В. Ермаков, Е.А. Депутатова // Мехатроника, автоматизация и управление: материалы 7-й науч.-техн. конф. – СПб., 2010. – С. 212-216.
- Депутатова Е.А. Математическая модель блока датчиков угловых скоростей для низкоорбитальных космических объектов / Ю.А. Самойлова, Е.А. Депутатова // Приборы и системы управления ракетно-космических комплексов: тр. IV науч.-техн. конф. молодых ученых и специалистов. – М.: Изд-во ФГУП «НПЦ АП», 2010. – С. 268-281.
- Депутатова Е.А. Математическая модель широкодиапазонного поворотного стенда с инерциальными чувствительными элементами и цифровой системой управления / Е.А. Депутатова, Р.В. Ермаков // Навигация и управление движением: ХII конф. молодых ученых // Гироскопия и навигация. – 2010. №2. – С.66.
- Депутатова Е.А. Широкодиапазонный универсальный стенд с цифровой системой управления для контроля гироскопических приборов / Д.М. Калихман, Л.Я. Калихман, Ю.В. Садомцев, А.В. Полушкин, Е.А. Депутатова, С.Ф. Нахов, В.М. Никифоров // 18-я С.-Петерб. Междунар. конф. по интегрированным навигационным системам. – СПб.: Изд-во ЦНИИ «Электроприбор», 2011. – С. 131-146.
Подписано в печать 05.04.12 Формат 6084 1/16
Бум. офсет. Усл. печ. л. 1,0 Уч.-изд. л. 1,0
Тираж 100 экз. Заказ 59 Бесплатно
Саратовский государственный технический университет
410054, Саратов, Политехническая ул., 77
Отпечатано в Издательстве СГТУ. 410054, Саратов, Политехническая ул., 77
Тел.: 24-95-70; 99-87-39, е-mail: [email protected]