

Информационно-измерительная система определения параметров коррекции движения для низкоорбитальных космических аппаратов
На правах рукописи
САФРОНОВ Сергей Геннадьевич
ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КОРРЕКЦИИ ДВИЖЕНИЯ
ДЛЯ НИЗКООРБИТАЛЬНЫХ КОСМИЧЕСКИХ АППАРАТОВ
Специальность 05.11.16 – Информационно-измерительные
и управляющие системы (приборостроение)
Автореферат
диссертации на соискание ученой степени
кандидата технических наук
Пенза – 2013
Работа выполнена на кафедре «Электронные системы и информационная безопасность» Федерального государственного бюджетного образовательного учреждения высшего профессионального образования «Самарский государственный технический университет».
Научный руководитель: кандидат технических наук, доцент
БУКАНОВ Федор Федорович
Официальные оппоненты: ЮРКОВ Николай Кондратьевич,
доктор технических наук, профессор,
заведующий кафедрой «Конструирование
и производство радиоаппаратуры»
ФГБОУ ВПО «Пензенский
государственный университет»
ГАНЬКИН Александр Васильевич,
кандидат технических наук, ведущий
научный сотрудник ОАО «Пензенский
научно-исследовательский
электротехнический институт»
Ведущая организация: ФГБОУ ВПО «Поволжский государственный университет телекоммуникаций и информатики»
(г. Самара)
Защита диссертации состоится 24 декабря 2013 г. в 14 часов 00 мин на заседании диссертационного совета Д 212. 186.02 ФГБОУ ВПО «Пензенский государственный университет» по адресу: 440026, г. Пенза, ул. Красная, 40.
С диссертацией можно ознакомиться в библиотеке ФГБОУ ВПО «Пензенский государственный университет».
Автореферат разослан «23» ноября 2013 г.

Ученый секретарь
диссертационного совета Светлов Анатолий Вильевич
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность работы. В отраслях промышленности, связанных с разработкой ИИС, предназначенных для решения целевых задач наведения и навигации, одной из основных проблем является определение параметров коррекции движения управляемого объекта. Подобные измерительные задачи решаются при создании систем наведения и сопровождения объектов с помощью оптико-электронных систем, размещаемых на борту подвижных объектов, при производстве автоматических средств навигации и определения ориентации летательных аппаратов, а также при обеспечении точности движения автономных промышленных транспортных роботов. Похожие проблемы существуют в отраслях промышленности, занимающихся производством аэро-фото-видеоаппаратуры; визуальных, астрономических и медицинских приборов; систем военного назначения.
Анализ открытых источников показывает, что существующие методы определения параметров коррекции движения подвижных объектов имеют технологические и эксплуатационные ограничения, сужающие возможность выполнения целевых задач в условиях внешних эксплуатационных воздействий. В системах, устанавливаемых на борту подвижных объектов, используются методы инерциальной, спутниковой навигации, астронавигации и методы навигации по эталонным картам местности. По отдельности каждая из систем не в состоянии решать все задачи, при этом точность результата достигается применением громоздких вычислительных процедур и дорогостоящих технологических решений.
В аэрокосмических системах наблюдения достигнутый уровень точности ориентации носителя и отсутствие технической возможности реализации не позволяют обеспечить стабилизацию линии визирования на период проведения съёмки заданных объектов. Существует проблема создания бортовых автономных систем сигнатурного зондирования космических аппаратов (КА), имеющих в составе специализированную ИИС, способную определять изменения состояния объектов и других элементов наблюдаемой сцены в реальном масштабе времени и обладающую свойствами самонастройки и самокоррекции. Часть задач может решаться с помощью интегрированной системы, обеспечивающей автоматическое формирование параметров коррекции движения КА в режиме реального времени. Создание такой системы на основе современных достижений в области обработки изображений, новых принципов построения ИИС и накопленного опыта применения в системах наведения и навигации корреляционных алгоритмов является актуальной задачей.
Значительный теоретический вклад в развитие корреляционно-экстремальных методов и алгоритмов обработки изображений внесли отечественные и зарубежные учёные Красовский А.А., Тарасенко В.П., Порфирьев Л.П., Лазарев Л.П., Прэтт У.К., Ту Д., Фу К., Гонсалес Р., Белоглазов И.Н., Баклицкий В.К., Алпатов П.А., Буканов Ф.Ф., Сбродов В.В., Свиридов В.П. и др. Основное внимание в литературе уделено корреляционным, разностным алгоритмам и локальным методам, основанным на сегментации изображений. Практика использования ИИС, в которых реализованы эти методы и алгоритмы, подтвердила высокий уровень метрологических характеристик и быстродействия ИИС.
Объектом исследования является оптико-электронная информационно-измерительная система определения параметров коррекции движения для низкоорбитальных космических аппаратов (КА).
Предметом исследования являются метод и алгоритм определения параметров коррекции движения подвижного объекта по изменению положения произвольных ориентиров на формируемом приёмником изображении подстилающей поверхности.
Целью диссертационной работы является создание ИИС определения параметров коррекции движения для низкоорбитального КА, функционирующей в реальном масштабе времени на основе разработанного метода и алгоритма с использованием эталонных изображений подстилающей поверхности.
Для достижения поставленной цели в диссертационной работе должны быть решены следующие задачи:
- анализ существующих методов наведения, навигации и обоснование метода определения параметров коррекции движения подвижного объекта по изменению значений координат ориентиров на формируемом приёмником изображении подстилающей поверхности;
- анализ влияния внешних условий на формирование оптического изображения и получение энергетических соотношений для выбранной модели наблюдения;
- разработка математической модели, определяющей связь измеряемых основной навигационной системой параметров движения и доступных измерению координат элементов изображения подстилающей поверхности, формируемого приёмником;
- разработка на основе предложенного метода определения параметров коррекции алгоритма, обеспечивающего работу ИИС в режимах обнаружения, наведения и стабилизации;
- разработка структуры ИИС, функционирующей в реальном времени;
- оценка общей погрешности, быстродействия аппаратной реализации ИИС, а также проведение математического, физико-математического моделирования и полунатурных экспериментов.
Научная новизна работы:
- Комбинированный метод определения параметров коррекции движения подвижного объекта, базирующийся на измерении смещения элементов формируемого приёмником изображения, отличающийся тем, что измерения, проводимые в условиях мгновенного винтового и вращательного движения носителя, основаны на учёте базового расстояния от фокальной плоскости приемника изображения до центра масс носителя.
- Модель движения элементов изображения, отличающаяся тем, что для установления связи параметров движения изображения и подвижного объекта проведён кинематический анализ механизма формирования изображения.
- Алгоритм определения параметров для осуществления коррекции движения подвижного объекта, основанный на периодическом сравнении текущего и эталонного изображения ориентира подстилающей поверхности, отличающийся тем, что применён программно-адаптивный принцип формирования изображений эталонов опорных ориентиров из текущего изображения.
- Оптико-электронная ИИС, структура которой отличается наличием арифметико-логического блока формирования параметров коррекции, функционирующего на основе предварительно записанных в память расчётных значений соответствия между изменением координат ориентира на текущем изображении и параметров ориентации носителя.
Методы исследований основаны на использовании теорий и положений измерительной техники, цифровой обработки сигналов, оптико-электронных систем, фотограмметрии, теоретической механики, теории статистических решений, аналитической геометрии, а также разделов математического анализа и математических методов обработки эксперимента.
Основные теоретические и практические выводы диссертации подтверждены результатами моделирования на ЭВМ и экспериментальными исследованиями макетных и стендовых образцов.
Практическая значимость:
- Метод позволяет за счёт изменения входных параметров модифицировать его для решения задач стабилизации пространственного положения подвижного объекта при сближении с другим подвижным или неподвижным объектом, возникающих, например, при стыковке КА или осуществлении мягкой посадки КА на исследуемую поверхность.
- Модель движения элементов изображения, формируемого приёмником, позволяет устанавливать связь параметров изображения с параметрами ориентации подвижного объекта, осуществляющего сложное составное движение.
- Алгоритм работы ИИС, адаптирующийся к изменениям условий наблюдения, позволяет автоматически формировать команды замкнутого управления для обеспечения стабилизации пространственного положения подвижного объекта.
- Аппаратно-программная реализация интегрируемой ИИС, предполагающая использование минимального количества вычислительных операций и отсутствие процедур определения значений наклонной дальности до опорного ориентира местности, позволяет организовать функционирование комплексной навигационной системы в реальном времени.
На защиту выносятся:
- Метод определения параметров коррекции движения подвижного объекта, основанный на учёте изменения положения ориентиров на формируемом приёмником изображении подстилающей поверхности.
- Математическая модель, определяющая связь доступных измерению параметров изображения подстилающей поверхности с известными параметрами движения подвижного объекта.
- Алгоритм формирования сигналов коррекции движения КА, обеспечивающий работу ИИС в режимах обнаружения, наведения и стабилизации.
- Структура оптико-электронной ИИС, предназначенной для определения в реальном времени параметров коррекции движения КА по формируемым приёмником текущим изображениям подстилающей поверхности.
- Результаты оценок быстродействия, анализа погрешностей, компьютерного моделирования и экспериментальных исследований ИИС.
Реализация и внедрение результатов работы осуществлены при разработке по заказу ФГУП ГНП РКЦ «ЦСКБ-Прогресс» (г. Самара) информационно-измерительного комплекса многоцелевой космической системы наблюдения малого КА и бортового комплекса целевого управления малого КА. Также ФГУП ГНП РКЦ «ЦСКБ-Прогресс» (г. Самара) используются результаты диссертации, полученные при проведении следующих фундаментальных научно-исследовательских работ (ФНИР), выполняемых по постановлению директивных органов:
- Разработка методики и алгоритмов оценки статистических характеристик при обработке космической информации. НТО по ФНИР. Шифр темы: «Самара 2», х/д 84/98, Самара, 1998 г.
- Анализ и исследование алгоритмов опознавания в реальном масштабе времени и возможности создания быстродействующего датчика опознавания наземных ориентиров. НТО по ФНИР. Шифр темы: «Основа-СУД – СГТУ», х/д 84/00, Самара, 2000 г.
- Проведение исследований обеспечения создания датчика целеуказаний для автоматической поворотной платформы точного наведения целевой аппаратуры малого КА многоцелевой космической системы наблюдения, сбора и передачи информации. НТО по ФНИР. Шифр темы: «Волга», х/д 101/01, Самара, 2001 г.
- Разработка принципов построения многоконтурной системы управления поворотной платформы точного наведения целевой аппаратуры КА на базе датчика целеуказаний. НТО по ФНИР. Шифр темы: «Волга», х/д 351/02, Самара, 2002 г.
- Разработка и оценка эффективности принципов построения бортового комплекса целевого управления малыми КА с использованием датчиков целеуказаний, местоположения и ориентации. Отчет по НИР. Шифр темы: «Волга», х/д 129/03, Самара, СамГТУ, 2003 г.
Результаты диссертации используются в учебном процессе кафедры «Электронные системы и информационная безопасность» ФБГОУ ВПО СамГТУ в курсах «Оптико-электронные системы средств дистанционного зондирования», «Телекоммуникационные технологии».
Апробация работы. Результаты работы докладывались, обсуждались и были одобрены на международных, всероссийских и межвузовских научно-технических конференциях, в том числе на XVIII Санкт-Петербургской международной конференции по интегрированным навигационным системам (Санкт-Петербург, 2011), III Всероссийской научно-технической конференции «Актуальные проблемы информационной безопасности. Теория и практика использования программно-аппаратных средств» (Самара, 2010), IХ Всероссийской научно-практической конференции «Компьютерные технологии в науке, практике и образовании» (Самара, 2010), V Всероссийской научно-технической конференции «Актуальные проблемы информационной безопасности. Теория и практика использования программно-аппаратных средств» (Самара, 2011), III Международной научно-технической конференции «Информационные, измерительные и управляющие системы (ИИУС-2012)» (Самара, 2012), VI Всероссийской научно-технической конференции «Актуальные проблемы информационной безопасности. Теория и практика использования программно-аппаратных средств» (Самара, 2012), V Всероссийской научно-практической конференции с международным участием «Математическое моделирование, численные методы и информационные системы» (Самара, 2013).
Публикации. По теме диссертационной работы опубликовано 11 печатных работ, в том числе 4 статьи в изданиях из перечня, рекомендуемого ВАК РФ.
Объем и структура работы. Диссертационная работа состоит из введения, четырех разделов, выводов и списка литературы из 252 наименований. Общий объем – 165 страниц, 7 таблиц, 54 рисунка, 7 фотографий.
СОДЕРЖАНИЕ РАБОТЫ
Во введении обосновывается актуальность темы исследования, формулируются цели и задачи исследования, характеризуются научная новизна и практическая ценность полученных результатов, приводятся основные положения, выносимые на защиту.
В первой главе рассматривается состояние проблемы и выбирается направление исследования. В обзоре проведен анализ и приведены особенности существующих методов измерений, применяемых для навигации, наведения, самонаведения подвижных объектов.
Показано, что из рассмотренных методов измерений для создания ИИС наиболее перспективен обзорно-сравнительный метод использования эталонных изображений подстилающей поверхности. Идентичность задач коррекции движения, решаемых с использованием эталонных карт местности на различных этапах движения подвижных объектов, позволяет использовать универсальные возможности обзорно-сравнительного метода. Корреляционно-экстремальные системы коррекции движения, наведения и самонаведения, реализующие этот метод, отличаются высокой точностью, помехозащищенностью, автономностью и достаточным быстродействием.
Предложен комбинированный метод определения параметров коррекции движения подвижных объектов, основанный на использовании результатов, получаемых основной навигационной системой подвижного объекта, и значений смещения координат ориентиров, расположенных на формируемом приёмником изображении подстилающей поверхности. Особенностью метода является учёт отношения значения фокусного расстояния к расстоянию между центром масс подвижного объекта и размещаемым перпендикулярно линии визирования приёмником изображения. Использованные в качестве эталонов изображения опорные ориентиры разнесены по диагоналям фокальной плоскости приёмника и формируются из текущего изображения подстилающей поверхности. Результирующие параметры коррекции образуются из соотношения измеренных значений смещения изображения и предварительно вычисленных и записанных в память угловых параметров ориентации.
Во второй главе с целью определения оптимальных условий для формирования изображения получено соотношение освещённости в фокальной плоскости приёмника (прибор с зарядовой связью ПЗС), параметров оптической системы и условий наблюдения:
 ,
,
где ![]() – освещенность на входе в атмосферу;
– освещенность на входе в атмосферу; ![]() – освещенность на входе в оптическую систему (ОС) за счет самосвечения атмосферы;
– освещенность на входе в оптическую систему (ОС) за счет самосвечения атмосферы; ![]() – угол вертикального ракурса;
– угол вертикального ракурса; ![]() – зенитный угол Солнца;
– зенитный угол Солнца; ![]() – относительное отверстие объектива;
– относительное отверстие объектива; ![]() – коэффициент рассеивания излучения (соотношение падающего и рассеянного излучения);
– коэффициент рассеивания излучения (соотношение падающего и рассеянного излучения); ![]() – коэффициент альбедо поверхности;
– коэффициент альбедо поверхности; ![]() – коэффициент пропускания атмосферы;
– коэффициент пропускания атмосферы; ![]() – коэффициент пропускания оптики.
– коэффициент пропускания оптики.
В модели изображения использован пространственно-временной фактор, определяющий величины измеряемых параметров коррекции
![]() ,
, ![]() ,
,
где ![]() ,
, ![]() – компоненты скорости перемещения изображения;
– компоненты скорости перемещения изображения; ![]() – время измерения.
– время измерения.
Для обеспечения измерений в пределах допустимого «смаза» предложено использовать оценку функции передачи модуляции
 ,
,  ,
,
где ![]() – время накопления;
– время накопления; ![]() – частота Найквиста;
– частота Найквиста; ![]() – размер элемента ПЗС.
– размер элемента ПЗС.
Установлена связь (рисунок 1) координат точки p изображения в фокальной плоскости приёмника, координат точки P подстилающей поверхности и координат носителя C, основанная на использовании фотограмметрических соотношений с учётом коэффициентов матрицы направляющих косинусов ![]() угловых элементов внешнего ориентирования
угловых элементов внешнего ориентирования ![]() , а также расстояния между центром масс C КА и центром проецирования S (
, а также расстояния между центром масс C КА и центром проецирования S (![]() ):
):
 где
где ![]() – координаты точки P местности;
– координаты точки P местности; ![]() – координаты КА;
– координаты КА;![]() – координаты точки p изображения;
– координаты точки p изображения; ![]() – фокусное расстояние ОС.
– фокусное расстояние ОС.
Разности значений координат точек p и p’ в фокальной плоскости изображения соответствуют наведению линии визирования из точки P’ (программное значение ориентира) в точку P (фактическое значение ориентира) ![]() ,
, ![]() .
.

Рисунок 1. Схема движения КА при обнаружении, наведении и стабилизации
Путем нахождения полной производной по времени получены значения компонентов скорости движения ![]() и
и ![]() точки p изображения. Условия наблюдения с борта КА:
точки p изображения. Условия наблюдения с борта КА: ![]()
![]()
![]()
![]()
![]() (высота полёта КА постоянна, точка P местности не движется и находится на горизонтальной поверхности);
(высота полёта КА постоянна, точка P местности не движется и находится на горизонтальной поверхности); ![]() (проекция путевой скорости движения КА);
(проекция путевой скорости движения КА); ![]() (расстояние между точками C и S).
(расстояние между точками C и S).
Составлены кинематические уравнения Эйлера, устанавливающие связь угловых скоростей точек изображения с их проекциями:

![]()
![]() .
.
Проведён кинематический анализ механизма формирования изображения. При этом для установления связи составляющих угловых элементов и компонентов угловых скоростей точек C и S использованы соотношения Виллиса для плоского механизма:
Для перехода от значений проекций угловых скоростей центра масс C к их абсолютным значениям использованы кинематические уравнения Эйлера:
![]()
![]()
![]() .
.
Получены выражения для компонентов скорости движения изображения, определяющие параметры коррекции ![]() ;
;![]() за время измерения
за время измерения ![]() :
:
 ;
;
 .
.
В третьей главе проведены анализ и выбор процедур предобработки, критериальной функции, способа поиска максимума критериальной функции для реализации алгоритма определения параметров коррекции, а также сформулированы требования к формированию эталонной информации БЭИ.
Предложен алгоритм работы системы (рисунок 2), имеющий следующие этапы: предобработка изображения; режим обнаружения; режим наведения; режим стабилизации.
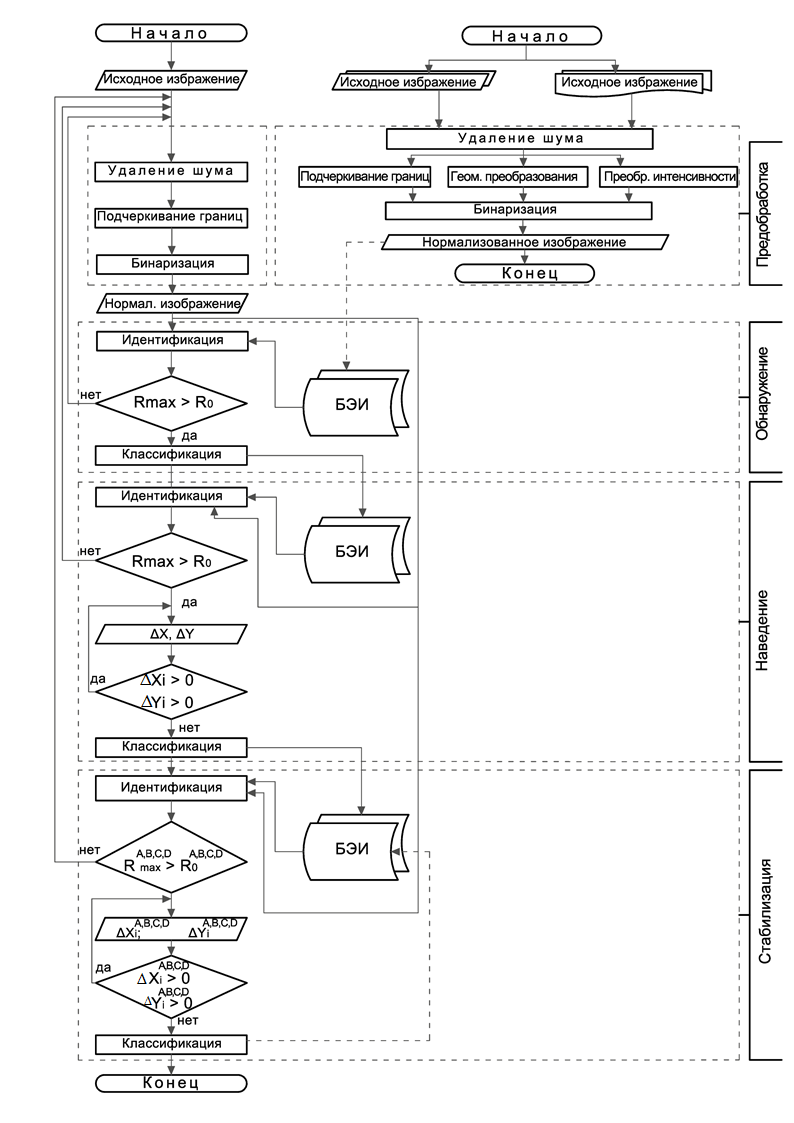
Рисунок 2. Алгоритм работы ИИС
Для предобработки используется пороговый метод фильтрации импульсных помех, при котором значение каждого из элементов массива F(i, j) анализируемого изображения сравнивается со средним значением функции яркости для небольшой группы ![]() в окрестностях элемента. Использована процедура подчёркивания контуров оператором Собеля, снижающая негативный эффект размытия границ после фильтрации. Применена бинаризация с использованием адаптивного порога. При этом в качестве порога квантования выбирается среднее значение отсчетов яркости по предыдущей строке
в окрестностях элемента. Использована процедура подчёркивания контуров оператором Собеля, снижающая негативный эффект размытия границ после фильтрации. Применена бинаризация с использованием адаптивного порога. При этом в качестве порога квантования выбирается среднее значение отсчетов яркости по предыдущей строке ![]() .
.
Для решения задачи поиска глобального максимума критериальной функции в структуру алгоритма включено функциональное ядро, состоящее из повторяющихся циклов предобработки, идентификации, принятия решения, классификации с последующей записью эталона в библиотеку эталонной информации (см. рисунок 2).
Для процедуры идентификации использован разностный алгоритм вида  , где
, где ![]() и
и ![]() – значения эталонного (ЭИ) и текущего (ТИ) изображений, особенность которого заключается в определении глобального максимума критериальной функции, означающего совпадение ЭИ и ТИ. Параметрами, характеризующими качество обнаружения объекта на изображении, являются вероятности правильного обнаружения
– значения эталонного (ЭИ) и текущего (ТИ) изображений, особенность которого заключается в определении глобального максимума критериальной функции, означающего совпадение ЭИ и ТИ. Параметрами, характеризующими качество обнаружения объекта на изображении, являются вероятности правильного обнаружения ![]() и ложной тревоги
и ложной тревоги ![]() . Уровню
. Уровню ![]() соответствует значение порога обнаружения
соответствует значение порога обнаружения ![]() , где
, где ![]() – функция Лапласа,
– функция Лапласа, ![]() ,
, ![]() – математическое ожидание сигнала,
– математическое ожидание сигнала, ![]() – среднеквадратическое отклонение ВКФ. Условием обеспечения качества обнаружения является превышение значения глобального максимума ВКФ уровня порога
– среднеквадратическое отклонение ВКФ. Условием обеспечения качества обнаружения является превышение значения глобального максимума ВКФ уровня порога ![]() . Порог
. Порог ![]() определяется в результате моделирования при задании условной вероятности ложной тревоги
определяется в результате моделирования при задании условной вероятности ложной тревоги ![]() (критерий Неймана – Пирсона). При сравнении бинарных ТИ и ЭИ основным фактором, влияющим на обнаружение, является отношение «сигнал/шум»
(критерий Неймана – Пирсона). При сравнении бинарных ТИ и ЭИ основным фактором, влияющим на обнаружение, является отношение «сигнал/шум» ![]() , где
, где ![]() – общее число элементов в ЭИ,
– общее число элементов в ЭИ, ![]() – число инвертированных (вследствие шумов) элементов ЭИ.
– число инвертированных (вследствие шумов) элементов ЭИ.
Сформулированы требования к ЭИ БЭИ, подготовка ЭИ проводится путём геометрических преобразований и преобразований распределения интенсивности изображений выбранных ориентиров. Опорные ориентиры представляют собой изображения протяженных объектов характерной формы (дороги, реки, строения и т.д.). Ориентиры отбираются с использованием первичных информационных материалов, при этом основным критерием выбора ориентира является наличие глобального максимума и низких значений уровней боковых максимумов. При выполнении нормализации отклонение характеристик ЭИ не должно превышать: по яркостным искажениям ±(15 25) %; по контрастным искажениям ±(15 25) %, по масштабным искажениям ±(5 10) %; по углу ракурса ±(10 15°); по ориентации ±(2 2,5°).
Предложена структура оптико-электронной ИИС (рисунок 3) в составе вспомогательной аппаратуры бортового комплекса управления (БКУ) КА, включающая в себя: ППИ – первичный преобразователь информации (матрица ПЗС KAI-01050, оптическая система «Калейнар-3В»); БПО – блок предварительной обработки; ФСУ – формирователь сигналов управления; БЭИ – библиотеку эталонной информации; ОЗУ ТИ – оперативно-запоминающее устройство текущей информации; ОЗУ ЭИ – оперативно-запоминающее устройство эталонной информации; УФЭ – устройство формирования эталона; АУС – анализатор условий сравнения; ВКО – вычислитель координат ориентира; ПК – параллельный коррелятор; УПМ – устройство поиска максимума.
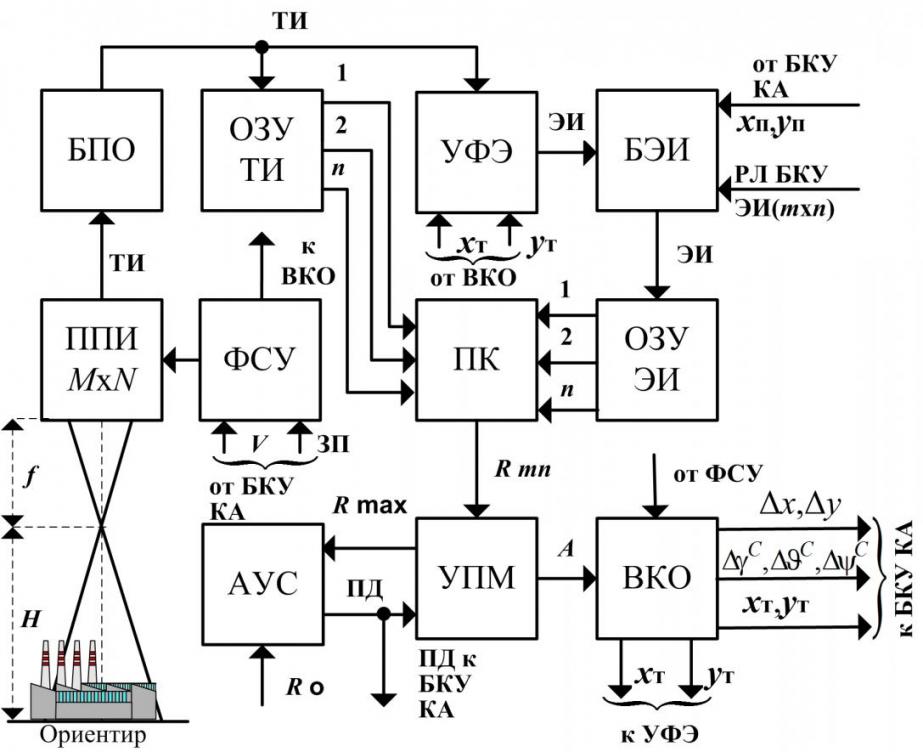
Рисунок 3. Структура оптико-электронной ИИС
Предложен программно-адаптивный принцип функционирования ИИС в режимах обнаружения, наведения и стабилизации (см. рисунок 2). При подходе к участку коррекции по команде БКУ (загрузка параметров ЗП), выдаваемой одновременно с передачей информации о расчетных значениях скорости движения изображения (V), программных значениях координат ориентира (![]() ) и эталонной информации (ЭИ
) и эталонной информации (ЭИ![]() ), ИИС запускается в режиме обнаружения. После предварительной обработки бинарный сигнал записывается в ОЗУ ТИ емкостью
), ИИС запускается в режиме обнаружения. После предварительной обработки бинарный сигнал записывается в ОЗУ ТИ емкостью ![]() бинарных отсчётов. В каждом такте поступления информации из ОЗУ ТИ параллельный коррелятор (рисунок 4), состоящий из n строчных бинарных корреляторов (СБК), осуществляет сравнение с
бинарных отсчётов. В каждом такте поступления информации из ОЗУ ТИ параллельный коррелятор (рисунок 4), состоящий из n строчных бинарных корреляторов (СБК), осуществляет сравнение с ![]() элементами строки ЭИ. На другие
элементами строки ЭИ. На другие ![]() входов ПК поступает информация с ОЗУ ЭИ. В результате этого в ПК методом «скользящего окна» происходит параллельное сравнение текущего и эталонного массивов в окне
входов ПК поступает информация с ОЗУ ЭИ. В результате этого в ПК методом «скользящего окна» происходит параллельное сравнение текущего и эталонного массивов в окне ![]() при всех возможных положениях эталона в зоне поиска
при всех возможных положениях эталона в зоне поиска ![]() . Значения функции взаимной корреляции (ВКФ)
. Значения функции взаимной корреляции (ВКФ)  , используемой в качестве меры сходства, с ПК поступают в УПМ, в котором запоминаются значения глобального максимума
, используемой в качестве меры сходства, с ПК поступают в УПМ, в котором запоминаются значения глобального максимума ![]() , а значения координат фактического положения
, а значения координат фактического положения ![]() в системе координат
в системе координат ![]() , связанной с линией визирования, определяются в ВКО. Значение
, связанной с линией визирования, определяются в ВКО. Значение ![]() сравнивается в АУС с порогом
сравнивается в АУС с порогом ![]() , при выполнении условия
, при выполнении условия ![]() система переходит в режим наведения. Анализатор АУС выдаёт команду (ПД) в УПМ, по которой в ВКО выдаётся адресная команда (А). С ВКО считывается разность между измеренным и программным положением ориентира
система переходит в режим наведения. Анализатор АУС выдаёт команду (ПД) в УПМ, по которой в ВКО выдаётся адресная команда (А). С ВКО считывается разность между измеренным и программным положением ориентира![]() ,
,![]() . В ВКО осуществляется преобразование измеренных значений отклонений
. В ВКО осуществляется преобразование измеренных значений отклонений ![]() ,
,![]() в угловые значения коррекции
в угловые значения коррекции ![]() .
.
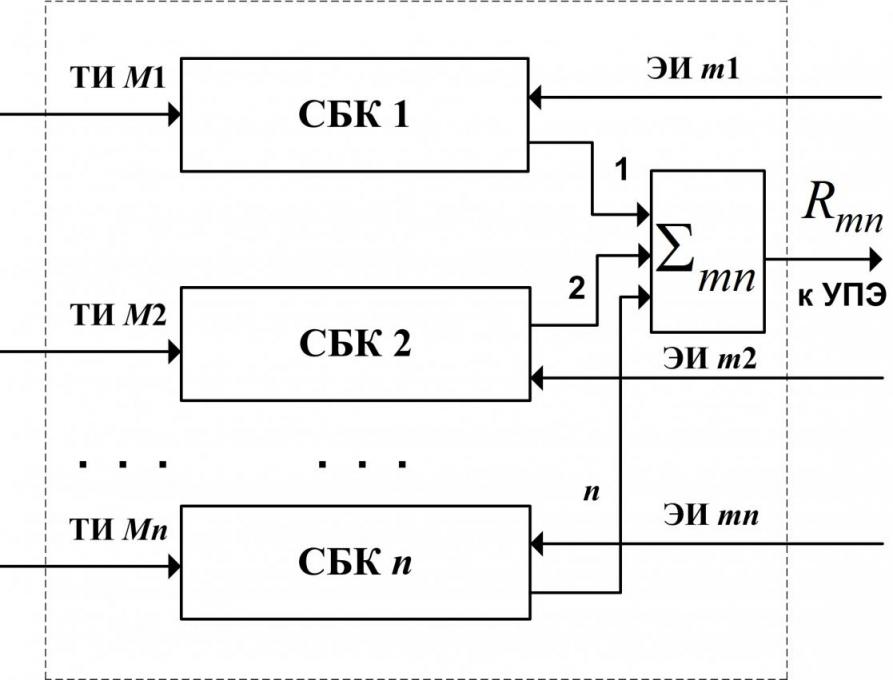
Рисунок 4. Структура параллельного коррелятора
Текущие значения ![]()
![]()
![]() .
.
Полученные результаты (![]() ) вместе с признаком достоверности результатов измерений (ПД) передаются в БКУ, осуществляющий коррекцию движения. Признак ПД формируется на основании значений
) вместе с признаком достоверности результатов измерений (ПД) передаются в БКУ, осуществляющий коррекцию движения. Признак ПД формируется на основании значений ![]() и сравнения полученных отклонений
и сравнения полученных отклонений ![]() ,
,![]() с ошибками предварительных целеуказаний БКУ.
с ошибками предварительных целеуказаний БКУ.
В режиме наведения УФЭ перезаписывает ЭИ опознанного фрагмента (ориентира) с ТИ в ОЗУ ЭИ. Перезапись эталона из ТИ позволяет повысить надежность сопровождения ориентира в процессе наведения, так как с целью оптимизации соотношения между вероятностями правильного обнаружения и ложной тревоги изменяется порог принятия решения ![]() . После совмещения линии визирования с центром ориентира ИИС переходит в режим стабилизации линии визирования, в котором обеспечивается измерение отклонений
. После совмещения линии визирования с центром ориентира ИИС переходит в режим стабилизации линии визирования, в котором обеспечивается измерение отклонений ![]() ,
, ![]() и парирование искажений ориентира при изменении положения КА относительно наблюдаемой сцены по алгоритму, аналогичному режиму наведения. При этом происходит перестройка структуры коррелятора ПК: из одного коррелятора с окном анализа
и парирование искажений ориентира при изменении положения КА относительно наблюдаемой сцены по алгоритму, аналогичному режиму наведения. При этом происходит перестройка структуры коррелятора ПК: из одного коррелятора с окном анализа ![]() формируются четыре независимых коррелятора формата
формируются четыре независимых коррелятора формата ![]() . Один из них – центральный, работает по запомненному ранее (при завершении наведения) фрагменту наблюдаемой сцены, а три других – по произвольным ориентирам, записанным из ТИ.
. Один из них – центральный, работает по запомненному ранее (при завершении наведения) фрагменту наблюдаемой сцены, а три других – по произвольным ориентирам, записанным из ТИ.
В четвертой главе проведены оценка статических, динамических характеристик ИИС и анализ погрешностей определения параметров коррекции движения.
На основе соотношений, полученных при анализе влияния внешних условий на формирование изображения, определены значения минимальной и максимальной освещенности в фокальной плоскости ![]() ,
, ![]() , которые позволяют сделать вывод о достаточности энергетического диапазона
, которые позволяют сделать вывод о достаточности энергетического диапазона ![]() для формирования качественного изображения.
для формирования качественного изображения.
Определены значения отношения «сигнал/шум» на выходе матрицы ПЗС: ![]() , где
, где ![]() – количество сигнальных электронов; количество шумовых электронов
– количество сигнальных электронов; количество шумовых электронов ![]() ; фотонный шум
; фотонный шум ![]() . Получено соотношение
. Получено соотношение 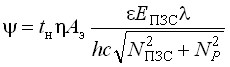 , где Аэ – площадь светочувствительного элемента;
, где Аэ – площадь светочувствительного элемента; ![]() – время накопления;
– время накопления; ![]() – квантовая эффективность ПЗС, – коэффициент использования излучения;
– квантовая эффективность ПЗС, – коэффициент использования излучения; ![]() – постоянная Планка;
– постоянная Планка; ![]() – скорость света в вакууме. Диапазон значений отношения сигнала к шуму на выходе ПЗС от
– скорость света в вакууме. Диапазон значений отношения сигнала к шуму на выходе ПЗС от ![]() до
до ![]() за счёт достаточного уровня освещённости обеспечивает процесс распознавания.
за счёт достаточного уровня освещённости обеспечивает процесс распознавания.
Показано, что начиная с пространственной частоты с периодом 3![]() размера ячейки функция передачи модуляции
размера ячейки функция передачи модуляции ![]() , характеризующая качество изображения, будет динамически устойчивой, а уровень сигнала на выходе ПЗС оказывается относительно стабильным и слабозависящим от фазы. То есть для обеспечения реальной разрешающей способности допустимый сдвиг изображения не должен превышать
, характеризующая качество изображения, будет динамически устойчивой, а уровень сигнала на выходе ПЗС оказывается относительно стабильным и слабозависящим от фазы. То есть для обеспечения реальной разрешающей способности допустимый сдвиг изображения не должен превышать ![]() элемента ПЗС
элемента ПЗС ![]() , так как значение функции
, так как значение функции ![]() зависит от быстроменяющихся величин
зависит от быстроменяющихся величин ![]() (время накопления) и
(время накопления) и ![]() (скорость движения изображения).
(скорость движения изображения).
Характер зависимости компонента скорости ![]() от значений углов пространственной ориентации КА (рисунок 5)
от значений углов пространственной ориентации КА (рисунок 5) ![]() =
=![]() для двух крайних диагональных значений координат изображения зоны поиска
для двух крайних диагональных значений координат изображения зоны поиска ![]() и
и ![]() показывает, что
показывает, что ![]() имеет максимальное значение при наблюдении в надир. Общий пример зависимости компонента скорости
имеет максимальное значение при наблюдении в надир. Общий пример зависимости компонента скорости ![]() от значений
от значений ![]() и
и ![]() (рисунок 6) подтверждает предположение о влиянии удаленности приемника изображения от центра масс на значение
(рисунок 6) подтверждает предположение о влиянии удаленности приемника изображения от центра масс на значение ![]() . С учетом значений
. С учетом значений ![]() ,
, ![]() и
и ![]() определено максимальное расчётное время накопления кадра ПЗС (
определено максимальное расчётное время накопления кадра ПЗС (![]() ) в режиме обнаружения при допустимом «смазе»
) в режиме обнаружения при допустимом «смазе» ![]() элемента
элемента ![]() . При этом функция
. При этом функция ![]() .
.
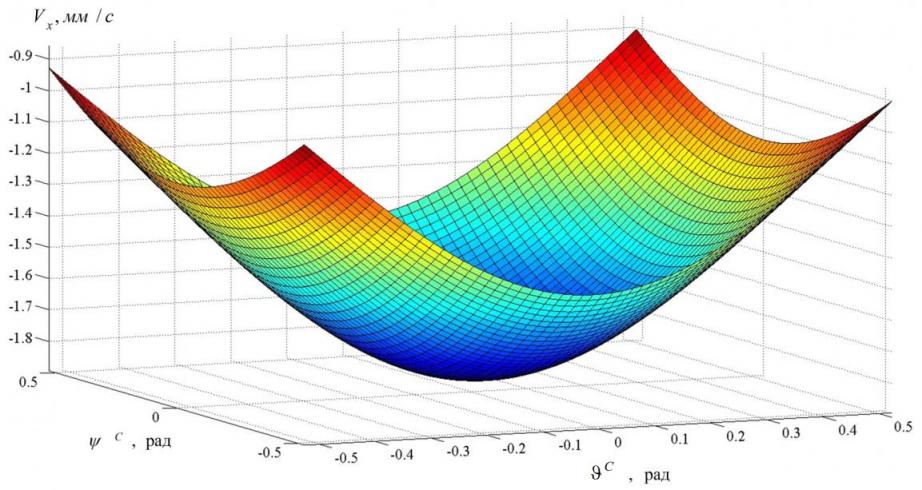
Рисунок 5. Зависимость компонента скорости ![]()
от значений углов пространственной ориентации КА ![]()
Особенность архитектуры ПЗС (KAI-01050) с буферизацией строк
(Interline Transfer CCD) позволяет производить одновременно экспонирование и считывание предыдущего кадра, т.е. при ![]() общее быстродействие ИИС определяется максимальным временем считывания кадра в режиме обнаружения
общее быстродействие ИИС определяется максимальным временем считывания кадра в режиме обнаружения ![]() :
: ![]() мс.
мс.
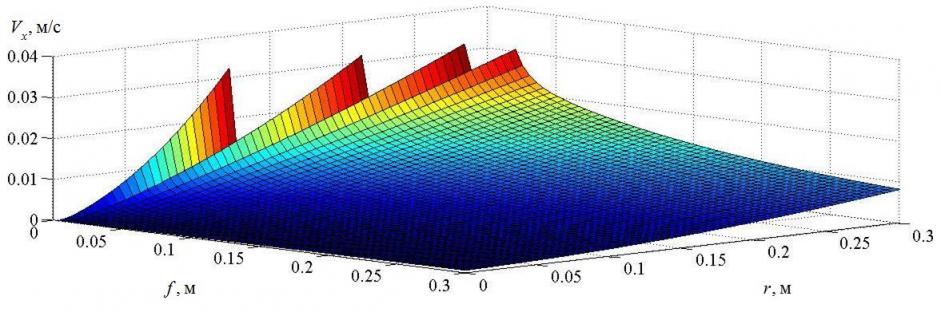
Рисунок 6. Зависимость компонента скорости ![]() от значений
от значений ![]()
(расстояние от приёмника до центра масс) и ![]() (фокусное расстояние ОС)
(фокусное расстояние ОС)
Точность ИИС обусловлена двумя типами погрешности: статической погрешностью (дискретизация, квантование, трансформирование) и динамической погрешностью, являющейся следствием инертности компонентов бортовой ИИС и её движения в пространстве относительно поверхности Земли, включающими:
- ошибку трансформирования – результат приближенного представления переменных в принятой математической модели;
- методическую ошибку алгоритма распознавания;
- инструментальную ошибку, имеющую сложный состав из-за трансформации ошибок всех этапов;
- дополнительные ошибки – следствие внешних влияний на ИИС.
При статистической оценке методической погрешности учитывалось, что плоскости матрицы ПЗС соответствует корреляционное поле на выходе коррелятора. При этом задача обнаружения сводится к фиксации факта попадания глобального максимума (ГМ) функции взаимной корреляции (ВКФ) в зону поиска. Собственные шумы матрицы ПЗС приводят к снижению значения и смещению положения ГМ ВКФ в корреляционной плоскости, создавая случайную составляющую координатной погрешности измерения. При различных уровнях зашумления ТИ фиксировалось число отклонений ВКФ относительно центра зоны обнаружения при условии наличия факта обнаружения. Общая случайная абсолютная погрешность измерения в долях размера пикселя:  , где
, где ![]() – среднеарифметическое отклонение значений
– среднеарифметическое отклонение значений ![]() ряда измерений
ряда измерений ![]() ,
, ![]() – квантиль распределения Стьюдента, табличное значение которого при доверительной вероятности
– квантиль распределения Стьюдента, табличное значение которого при доверительной вероятности ![]() и значении
и значении ![]() составляет 3,3.
составляет 3,3.
Приведенная погрешность смещения ГМ ВКФ (режим обнаружения) ![]() (рисунок 7) позволяет сделать вывод, что начиная со значения
(рисунок 7) позволяет сделать вывод, что начиная со значения ![]() методическая погрешность алгоритма обнаружения объекта приобретает необходимую стабильность
методическая погрешность алгоритма обнаружения объекта приобретает необходимую стабильность ![]() . Соответственно, для всего диапазона координат матрицы ПЗС (режим стабилизации)
. Соответственно, для всего диапазона координат матрицы ПЗС (режим стабилизации) ![]() .
.
При наблюдении в надир ![]() и максимальном значении
и максимальном значении ![]() для координаты
для координаты![]()
 приведённая погрешность трансформирования некоррелированных значений:
приведённая погрешность трансформирования некоррелированных значений:
 ;
;
 .
.
А для координаты ![]() :
:

 ;
;
 .
.
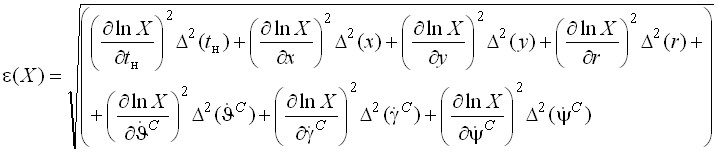
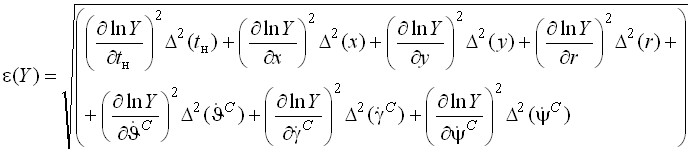
Для области ПЗС размером ![]() (режим обнаружения) получены значения
(режим обнаружения) получены значения ![]() ;
; ![]() при скорости КА
при скорости КА ![]() высоте полёта
высоте полёта ![]() угловых скоростях
угловых скоростях ![]() ; зоне обнаружения
; зоне обнаружения  фокусном расстоянии
фокусном расстоянии ![]() ; расстоянии от ПЗС до центра масс
; расстоянии от ПЗС до центра масс ![]() , где
, где ![]() ;
; ![]() ;
; ![]() ;
;  – абсолютные допустимые погрешности. Пример (рисунок 8) отражает зависимость приведённой погрешности в области допускаемых значений угловых скоростей, а оценка погрешности вблизи малых значений аргументов позволяет выбирать значения угловых скоростей регулирования положения центра масс КА при формировании закона наведения, осуществляемого БКУ.
– абсолютные допустимые погрешности. Пример (рисунок 8) отражает зависимость приведённой погрешности в области допускаемых значений угловых скоростей, а оценка погрешности вблизи малых значений аргументов позволяет выбирать значения угловых скоростей регулирования положения центра масс КА при формировании закона наведения, осуществляемого БКУ.

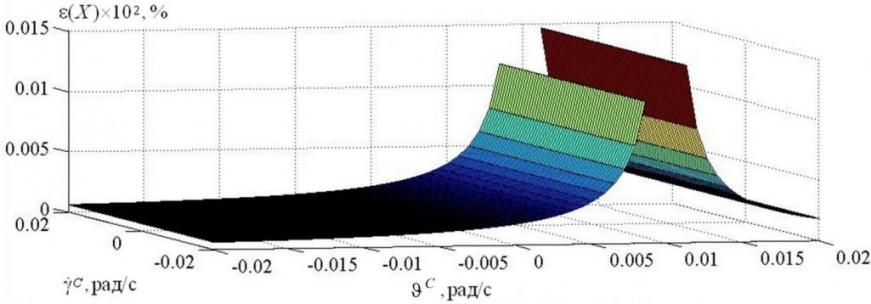
Рисунок 7. Методическая погрешность Рисунок 8. Зависимость погрешности
алгоритма (смещения ГМ ВКФ) от значений угловых скоростей
Преобразование непрерывной величины в дискретную величину ![]() осуществляется в матрице ПЗС с максимальным абсолютным значением погрешности дискретности
осуществляется в матрице ПЗС с максимальным абсолютным значением погрешности дискретности ![]() , где
, где ![]() – шаг дискретизации. В режиме стабилизации при использовании всей координатной шкалы зоны поиска
– шаг дискретизации. В режиме стабилизации при использовании всей координатной шкалы зоны поиска ![]() приведённая погрешность дискретности
приведённая погрешность дискретности ![]() .
.
Для оценки приведенной погрешности квантования АЦП (типа ADC14L040) использовано её предельное значение ![]() . Значение погрешности квантования для
. Значение погрешности квантования для ![]() разрядов
разрядов ![]() определяет выбор необходимой разрядности АЦП, осуществляемый таким образом, чтобы погрешность квантования составляла приблизительно
определяет выбор необходимой разрядности АЦП, осуществляемый таким образом, чтобы погрешность квантования составляла приблизительно ![]() от суммарной допускаемой приведённой погрешности.
от суммарной допускаемой приведённой погрешности.
Источником инструментальных погрешностей бортового вычислителя ИИС является ограничение разрядности сетки. Необходимый запас разрядной сетки цифровой подсистемы ИИС обеспечивается в ПЛИС (серии Virtex 5, Virtex 5SXT Xilinx) путём каскадирования блоков аппаратного умножителя 18-разрядных операндов, совмещенных с 48-разрядными аккумуляторами, соответственно, влиянием погрешностей вычислений можно пренебречь.
Приведённая погрешность средства измерения в динамическом режиме – погрешность измерения переменной во времени величины, определяемой скоростью движения КА относительно подстилающей поверхности и временем считывания кадра ![]() в режиме стабилизации
в режиме стабилизации  .
.
Для ИИС определена дополнительная случайная динамическая частотная погрешность, характерная для периодических процессов, влияние которой ограничивает диапазоны значений частоты кадров и времени накопления: ![]() , где
, где ![]() – время накопления,
– время накопления, ![]() – частота кадров. Для заданной относительной погрешности
– частота кадров. Для заданной относительной погрешности ![]() при
при ![]() с минимальная частота кадров составит
с минимальная частота кадров составит![]() кадра/с, а при максимальной частоте кадров
кадра/с, а при максимальной частоте кадров ![]() кадров/с минимальное расчётное время накопления
кадров/с минимальное расчётное время накопления ![]() . Необходимый уровень точности ИИС, работающей в динамическом режиме, обеспечивается командами ФСУ, формируемыми в зависимости от значений скорости движения изображения, уровня «сигнал/шум», времени накопления и частоты кадров.
. Необходимый уровень точности ИИС, работающей в динамическом режиме, обеспечивается командами ФСУ, формируемыми в зависимости от значений скорости движения изображения, уровня «сигнал/шум», времени накопления и частоты кадров.
Оценка суммарной случайной погрешности в динамическом режиме производилась путём геометрического суммирования среднеквадратических значений приведённых погрешностей, являющихся статистически независимыми, а следовательно, и некоррелированными величинами: ![]() , где
, где ![]() – суммарная погрешность трансформирования;
– суммарная погрешность трансформирования; ![]() – суммарная методическая погрешность;
– суммарная методическая погрешность; ![]() – сумма инструментальных погрешностей. Суммарные погрешности измерения параметров коррекции для координаты
– сумма инструментальных погрешностей. Суммарные погрешности измерения параметров коррекции для координаты ![]() :
:
 ,
,
для координаты ![]() :
:
 .
.
Для подавления некоррелированных погрешностей и уменьшения случайной составляющей погрешности использован метод пространственного осреднения, при этом за счёт перестройки структуры организуется ![]() измерительных каналов, имеющих параллельную структуру. В этом случае среднеквадратическое отклонение суммарной случайной погрешности при независимости случайных погрешностей каналов может быть снижена в
измерительных каналов, имеющих параллельную структуру. В этом случае среднеквадратическое отклонение суммарной случайной погрешности при независимости случайных погрешностей каналов может быть снижена в ![]() раз:
раз: ![]() . Итоговые приведённые погрешности для
. Итоговые приведённые погрешности для ![]() (по числу эталонов) координаты
(по числу эталонов) координаты ![]() :
: ![]() , координаты
, координаты ![]() :
: ![]() .
.
Абсолютные значения погрешности выходных параметров коррекции ![]()
![]() ; (ПЗС)
; (ПЗС)
![]()
![]()
![]() ;(на местности)
;(на местности)
![]() 0,00002694рад0°0'6";
0,00002694рад0°0'6";  0,00002651рад0°0'6";
0,00002651рад0°0'6";![]() 0,0005350°1'50", где
0,0005350°1'50", где ![]() .
.
При использовании 8 ориентиров 1616: ![]() 4";
4";![]() 0°1'18".
0°1'18".
Экспериментальные исследования ИИС представлены тремя этапами. На первом и втором этапах проводились математическое моделирование и экспериментальные исследования влияния геометрических, масштабных и других искажений текущего информационного массива на работу корреляционного алгоритма в зависимости от параметров предварительной обработки, изменения углов ориентации, угла визирования, масштаба, освещённости и контраста, а также смаза изображения. Первый этап математического моделирования на ЭВМ позволил оценить возможность реализации алгоритма проектируемой системы. Исследования второго этапа, проводимые на стенде метрологических исследований (СМИ), позволили сформулировать требования к качеству и объему ЭИ, а также определить область допустимых искажений, при которых корреляционный алгоритм сохраняет свою работоспособность. При исследованиях использована модель искажения исходного изображения матричного ПЗС
 ,
,
где ![]() – параметр смаза;
– параметр смаза; ![]() – коэффициент яркостных искажений;
– коэффициент яркостных искажений;![]() – коэффициент контрастных искажений;
– коэффициент контрастных искажений; ![]() – случайный шум.
– случайный шум.
На третьем этапе проведены исследования и отладка ИИС путём моделирования влияния динамических условий наблюдения фоно-целевой обстановки (ФЦО) на стенде комплексной отработки (СКО) (рисунок 9). Стенд позволяет проводить отладку автономных исследуемых систем (АИС) различного назначения. В методику отработки ИИС на СКО входила проверка функционирования узлов и блоков, заключающаяся в контроле эксплуатационных характеристик при задании диапазонов основных влияющих факторов, имитирующих реальные условия, а также отладка информационного обмена с бортовыми системами КА, заключающаяся в имитации структуры, форматов, последовательности команд реальной бортовой ЭВМ и БКУ КА.
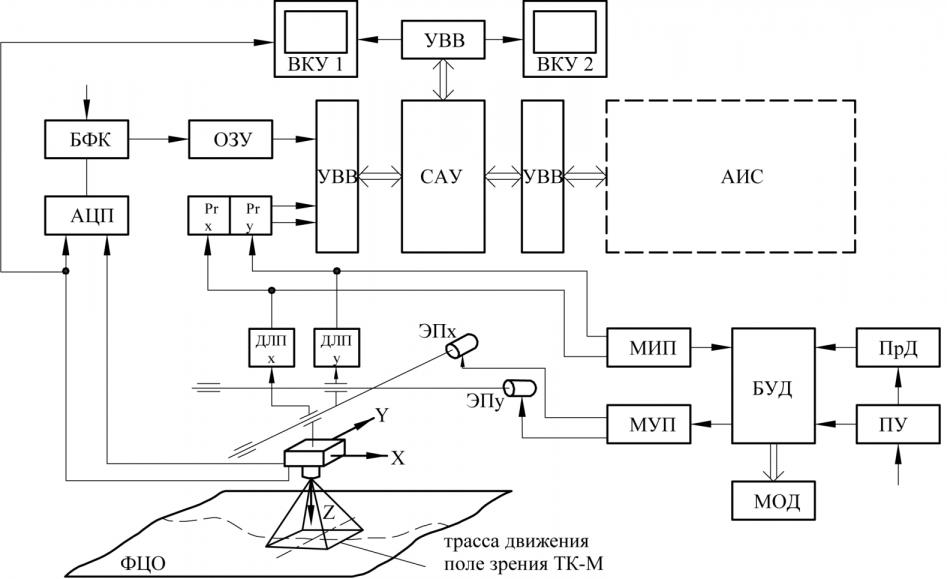
Рисунок 9. Стенд комплексной отработки АИС
Этапы моделирования представлены некоторыми результатами в виде зависимостей значений деградации максимума ВКФ от изменений условий наблюдения: рисунок 10 – при различных углах визирования ![]() от значений угла ориентации
от значений угла ориентации ![]() ; рисунок 11 – при разном с/ш в зависимости от контраста
; рисунок 11 – при разном с/ш в зависимости от контраста ![]() ; рисунок 12 – при
; рисунок 12 – при ![]() ,
, ![]() и освещённости (линия 1 – а=1,0; линия 2 – а=1,5; линия 3 – а=0,5) от значений смаза
и освещённости (линия 1 – а=1,0; линия 2 – а=1,5; линия 3 – а=0,5) от значений смаза ![]() ; рисунок 13 – при
; рисунок 13 – при ![]() и
и ![]() (линия 1 – с/ш=30; линия 2 – с/ш=20; линия 3 – с/ш=10; линия 4 – с/ш=5) от освещенности
(линия 1 – с/ш=30; линия 2 – с/ш=20; линия 3 – с/ш=10; линия 4 – с/ш=5) от освещенности ![]() .
.
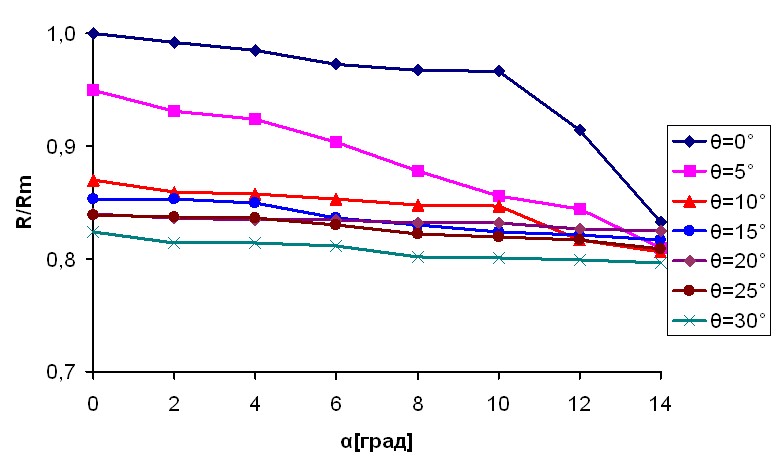
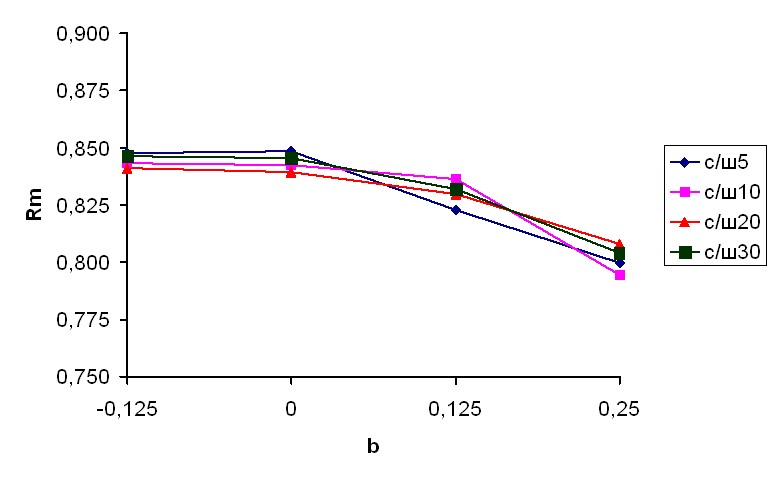
Рисунок 10. Зависимость ВКФ Рисунок 11. Зависимость ВКФ
от изменения угла ориентации от изменения контраста
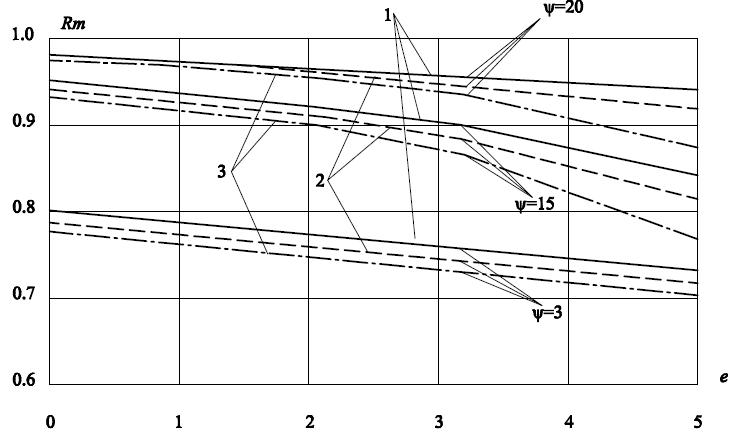
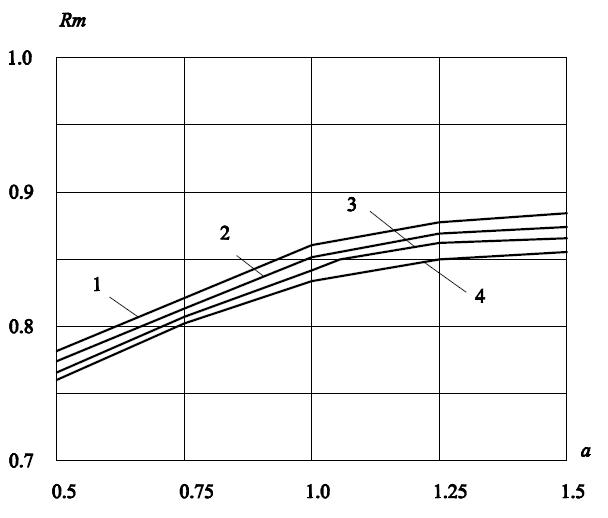
Рисунок 12. Зависимость ВКФ Рисунок 13. Зависимость ВКФ
от изменения значений «смаза» от изменения освещённости
Проведённые эксперименты показали работоспособность ИИС определения параметров коррекции при моделировании внешних воздействий.
Результаты и выводы по работе:
1. По результатам анализа существующих методов коррекции движения подвижных объектов предложен комбинированный метод определения параметров коррекции движения подвижного объекта по эталонным изображениям, формируемым приёмником из текущего изображения подстилающей поверхности.
2. Определены оптимальные условия, необходимые для формирования приёмником изображения подстилающей поверхности, а также получены основные энергетические соотношения, учитывающие влияние внешних факторов.
3. Разработана математическая модель, устанавливающая связь параметров сложного движения подвижного объекта с параметрами смещения изображения, сформированного приёмником.
4. Реализован и опробован алгоритм определения параметров коррекции движения КА, обеспечивающий работу ИИС в режимах обнаружения, наведения и стабилизации.
5. Предложена структура быстродействующей ИИС определения параметров коррекции движения КА, которая позволяет использовать её в качестве интегрированной системы при создании различных навигационных комплексов.
6. На основе результатов компьютерного моделирования и экспериментальных исследований макетных образцов подтверждена работоспособность ИИС. Проведенная оценка погрешности ИИС позволяет сделать вывод о существенном (минимум в 60 раз по каналам тангажа и крена; минимум в 2,5 раза по каналу рысканья) снижении погрешности определения параметров ориентации и стабилизации существующих БКУ КА.
ОСНОВНЫЕ ПУБЛИКАЦИИ ПО ТЕМЕ ДИССЕРТАЦИИ
Статьи, опубликованные в изданиях, рекомендованных ВАК РФ
1. Сафронов С.Г. Использование систем дистанционного зондирования для решения задач управления подвижными объектами [Текст] / В.В. Сбродов, В.П. Свиридов, С.Г. Сафронов // Вестник Самарского государственного технического университета. Серия «Технические науки». – 2011. – № 3(31). – С. 89-96.
2. Сафронов С.Г. Решение задач управления и наведения средств дистанционного зондирования с помощью систем обработки и анализа визуальной информации [Текст] / В.В. Сбродов, В.П. Свиридов, С.Г. Сафронов // Вестник Самарского государственного аэрокосмического университета. – 2012. – № 1(32). – С. 47-55.
3. Сафронов С.Г. Метод установления связи параметров движения изображения приемника с параметрами движения носителя [Текст] / С.Г. Сафронов // Образование. Наука. Научные кадры. – 2013. – № 5. – С. 196-203.
4. Сафронов С.Г. Компьютерное моделирование и полунатурные испытания оптико-электронных систем на автоматизированных стендах [Текст] / Ф.Ф. Буканов, В.В. Сбродов, С.Г. Сафронов // Информационно-управляющие системы. – 2013. – № 6(67). – С. 37-47.
Публикации в других изданиях
5. Сафронов С.Г. Многоконтурные системы управления и навигации на базе датчиков опознавания ориентиров [Текст] / В.В. Сбродов, В.П. Свиридов, С.Г. Сафронов // В сб.: XVIII Санкт-Петербургская международная конференция по интегрированным навигационным системам. – СПб.: ОАО «Концерн ЦНИИ Электроприбор», 2011. – С. 246-247.
6. Сафронов С.Г. Оценка возможности использования оптико-электронных систем наблюдения для управления малыми космическими аппаратами [Текст] / Ф.Ф. Буканов, С.Г. Сафронов, В.В. Сбродов // В сб.: Информационные, измерительные и управляющие системы (ИИУС-2012): Мат. III Международной научно-технической конференции. – Самара: СамГТУ, 2012. – С. 193-198.
7. Сафронов С.Г. Моделирование процедур обнаружения объектов в системах визуального наблюдения [Текст] / Ю.Н. Лазарев, В.В. Сбродов, С.Г. Сафронов // В сб.: Актуальные проблемы информационной безопасности. Теория и практика использования программно-аппаратных средств: Мат. VI Всероссийской научно-технической конференции. – Самара: СамГТУ, 2012. – С. 57-63.
8. Сафронов С.Г. К вопросу обнаружения природно-антропогенных пожаров дистанционными средствами зондирования [Текст] / Ф.Ф. Буканов, С.Г. Сафронов, В.В. Сбродов // В сб.: Актуальные проблемы информационной безопасности. Теория и практика использования программно-аппаратных средств: Мат. V Всероссийской научно-технической конференции. – Самара: СамГТУ, 2011. – С. 25-27.
9. Сафронов С.Г. Информационные системы безопасности воздушных судов [Текст] / В.В. Сбродов, И.В. Тихомиров // В сб.: Актуальные проблемы информационной безопасности. Теория и практика использования программно-аппаратных средств: Мат. IV Всероссийской научно-технической конференции. – Самара: СамГТУ, 2011. – С. 58-62.
10. Сафронов С.Г. Классификация и перспектива информационно-управляющих систем навигации, наведения и распознавания образов [Текст] // В сб.: Компьютерные технологии в науке, практике и образовании: Тр. IX Всероссийской научно-технической конференции. – Самара: СамГТУ, 2010. – С. 151-153.
11. Сафронов С.Г. Оценка погрешностей корреляционного обнаружения объектов на изображении с использованием метода Монте-Карло [Текст] / Ю.Н. Лазарев, С.Г. Сафронов, Н.Ю. Лазарев // В сб.: Математическое моделирование, численные методы и информационные системы: Мат. V Всероссийской научно-практической конференции с международным участием. – Самара: САГМУ, 2013. – T.1. – С. 152-156.
Научное издание
Автореферат отпечатан с разрешения диссертационного совета
(протокол № 16 от 13.11.2013 г.)
Подписано в печать хх.11.13
Формат 6084 1/16. Бумага офсетная
Усл. п. л. 2,09. Уч.-изд. л. 2,03
Тираж 100 экз. Заказ № ххх
Федеральное государственное бюджетное
образовательное учреждение
высшего профессионального образования
«Самарский государственный технический университет»
443100, г. Самара, ул. Молодогвардейская, 244. Главный корпус
Отпечатано в типографии
Самарского государственного технического университета
443100, г. Самара, ул. Молодогвардейская, 244. Корпус №8