

Алгоритмы и способы повышения точности работы системы ориентации и навигации внутритрубных средств дефектоскопии
На правах рукописи
КОПИЧЕВА Алла Алексеевна
АЛГОРИТМЫ И СПОСОБЫ ПОВЫШЕНИЯ ТОЧНОСТИ
РАБОТЫ СИСТЕМЫ ОРИЕНТАЦИИ И НАВИГАЦИИ
ВНУТРИТРУБНЫХ СРЕДСТВ ДЕФЕКТОСКОПИИ
Специальность 05.11.03 – Приборы навигации
Автореферат
диссертации на соискание ученой степени
кандидата технических наук
Саратов 2013
Работа выполнена в Федеральном государственном бюджетном образовательном учреждении высшего профессионального образования «Саратовский государственный технический университет имени Гагарина Ю.А.»
Научный руководитель – заслуженный деятель науки и техники РФ,
доктор технических наук, профессор
Плотников Петр Колестратович
Официальные оппоненты: Панкратов Владимир Михайлович
доктор технических наук, профессор,
ФГБУН «Институт проблем
точной механики и управления
Российской академии наук»,
заместитель директора по научной работе
Пылаев Юрий Константинович
кандидат технических наук,
ООО НПП «Антарес» (г. Саратов),
главный конструктор
Ведущая организация – ФГУП «Научно-производственный
центр автоматики и приборостроения
имени академика Н.А. Пилюгина» –
«ПО «КОРПУС» (г. Саратов)
Защита состоится «26» декабря 2013 г. в 15 часов на заседании диссертационного совета Д 212.242.04 при ФГБОУ ВПО «Саратовский государственный технический университет имени Гагарина Ю.А.» по адресу: 410054, Саратов, ул. Политехническая, 77, ауд. 414/1 корп.
С диссертацией можно ознакомиться в научно-технической библиотеке ФГБОУ ВПО «Саратовский государственный технический университет имени Гагарина Ю.А.».
Автореферат разослан «25» ноября 2013 года
Ученый секретарь
диссертационного совета Алешкин Валерий Викторович
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность проблемы. Проблема надежной эксплуатации магистральных газопроводов затрагивает интересы всех крупнейших нефтяных и газовых компаний мира. В Российской Федерации функционируют магистральные нефте- и газотрубопроводы общей протяженностью свыше 600 тыс. км. Аварии магистральных трубопроводов (ТП) обычно являются причинами больших экологических разрушений и экономических потерь. Для исключения аварий трубопроводов в нефтегазовой отрасли налажен их периодический мониторинг с помощью широкого спектра технических средств как наружного, так и внутреннего наблюдения их состояния.
Существует несколько различных методов определения технического состояния трубопровода (ТП). При этом общепризнано, что метод внутритрубной дефектоскопии позволяет с наибольшей эффективностью обнаруживать коррозионные поражения, механические повреждения и отклонения от строительных норм. Данный метод относится к группе методов так называемого «неразрушающего контроля» и, что немаловажно, осуществляется без остановки процесса транспортировки газо- или нефтепродукта по исследуемому участку трубопровода.
Инструментом такого контроля являются внутритрубные средства дефектоскопии (ВСД) различных классов:
- профилемеры, определяющие геометрические параметры ТП;
- дефектоскопы на основе магнитных или ультразвуковых датчиков, определяющие тип повреждения металла стенки трубы (коррозионное, механическое) и глубину его поражения;
- навигационно-топографические ВСД, позволяющие определять пространственные координаты трубопровода и его дефектов.
Для снижения затрат на ремонт магистральных ТП требуется знание положения его элементов и дефектов на местности с погрешностью, соизмеримой с шириной ковша землеройных машин (1 м). Точные пространственные координаты трубопроводов необходимы и для решения вопросов землепользования: составления кадастров, подготовки проектной документации на строительство вблизи охранной зоны и др. Привязка дефектов трасс магистральных ТП (особенно многониточных) к карте местности позволяет выявлять пространственно обусловленные факторы их развития, более эффективно прогнозировать техническое состояние магистрального ТП и планировать ремонтно-восстановительные работы.
Уровень безопасности и надежности трубопровода определяется не только дефектами труб и сварных соединений, но и уровнем напряженно-деформированного состояния элементов трубопровода. Известно, что максимальное количество отказов и аварий на подземных трубопроводах происходят в начальный период их эксплуатации – другими словами, в период, когда уложенные в землю трубы испытывают наибольшие перемещения, связанные с осадкой грунтов и восстановлением нарушенных при строительстве водотоков. Контроль таких перемещений, их мониторинг позволяют выявлять наиболее опасные места и своевременно принимать необходимые меры. Особенно актуальна эта проблема для новых трубопроводов, проложенных в гористой местности или местности с нестабильным тектоническим состоянием, а также на участках с большой неоднородностью плотности грунта при сезонных колебаниях температуры. Для определения таких мест требуется знание положения газопровода на местности с точностью до десятков сантиметров.
Не менее важным параметром пространственного положения трубопровода является его расположение под землей, в первую очередь глубина его залегания. Этот параметр строго регламентируется на этапе строительства трубопроводов Строительными нормами и правилами для магистральных трубопроводов СНиП 2.05.06-85*. Согласно данным СНиП, заглубление трубопроводов до верха трубы надлежит принимать не менее 0.6 м, однако глубина залегания отдельных участков трубопровода определяется характеристиками местности. За время эксплуатации трубопровода глубина его залегания может меняться. Это связано с естественными природными процессами, такими как размытие дна рек, пучение грунта, естественное осушение болот, оползневые процессы и т.п. В связи с этим появляется необходимость мониторинга глубины залегания трубопровода с течением времени.
Для решения задачи позиционирования трубопровода перспективным направлением является использование на борту внутритрубного средства дефектоскопии (ВСД) интегрированных систем ориентации и навигации. Такие системы обычно представляют собой совокупность бесплатформенной инерциальной системы ориентации (БИСО) и системы навигации в виде одометров, спутниковых навигационных систем (СНС) и геодезических средств для определения координат характерных точек трубопровода.
Точность решения задачи позиционирования трубопровода определяется погрешностями СНС, одометрической системы (![]() ) и погрешностями решения задачи ориентации. При этом следует отметить, что БИСО, установленная на борту ВСД, определяет ориентацию приборного трехгранника, а для решения задачи счисления координат на основе интегрирования сигналов одометрической системы требуется определять текущую ориентацию оси и других точек ТП. Из опыта эксплуатации ВСД известно, что угловое смещение продольной оси инспектирующего снаряда относительно оси ТП может составлять порядка 1°, что при длине участка ТП до 1 км может привести к погрешности определения координат до 20 м.
) и погрешностями решения задачи ориентации. При этом следует отметить, что БИСО, установленная на борту ВСД, определяет ориентацию приборного трехгранника, а для решения задачи счисления координат на основе интегрирования сигналов одометрической системы требуется определять текущую ориентацию оси и других точек ТП. Из опыта эксплуатации ВСД известно, что угловое смещение продольной оси инспектирующего снаряда относительно оси ТП может составлять порядка 1°, что при длине участка ТП до 1 км может привести к погрешности определения координат до 20 м.
Работой в области подземной навигации успешно занимаются такие организации как ROSEN, Tuboscope Pipeline Services Inc (США), ЗАО «Газприборавтоматикасервис» (Саратов, Россия), ЗАО НПО «Спецнефтегаз» (Екатеринбург, Россия).
Проблемам повышения точности работы подземных средств ориентации и навигации посвящены труды как российских авторов: А.Н. Бакурский, П.К. Плотников, А.И. Синев, В.Б. Никишин, Я.И. Биндер, Н.А. Парусников, А.В. Андропов, А.А. Панев, так и зарубежных: Eun-Hwan Shin (Канада, Корея), Naser El-Sheimy (Канада).
Автор выражает большую признательность генеральному директору ЗАО «Газприборавтоматикасервис» Синеву А.И. за разрешение использования в диссертационной работе натурных данных пропусков ВСД на участках реальных трубопроводов, а также особую благодарность к.т.н. Никишину В.Б. за многочисленные консультации по работе над диссертацией.
Цель и основные задачи диссертационной работы. Целью настоящей работы является разработка способов и алгоритмов повышения точности интегрированных бесплатформенных систем ориентации и навигации средств внутритрубной дефектоскопии.
Для достижения указанной цели поставлены следующие задачи:
- провести анализ современных подходов к решению задач ориентации и способов повышения точности позиционирования трубопровода с помощью ВСД;
- исследовать и сопоставить уровни методических и инструментальных погрешностей и выработать рекомендации по использованию различных вариантов построения алгоритмов работы БИСО в виде дифференциальных кинематических уравнений Эйлера с введенными в них членами коррекции, для различных режимов движения ВСД с малыми (< 20°) и большими (> 20°) углами тангажа;
- разработать и исследовать алгоритмы и способы идентификации и компенсации влияния углового смещения продольной оси снаряда относительно оси трубопровода на точность его позиционирования для случаев движения ВСД с вращением и без вращения;
- внедрить в производство внутритрубных средств навигации и дефектоскопии результаты исследований, разработанные алгоритмы и способы компенсации влияния углового смещения.
Методы исследования. Рассматриваемые в диссертационной работе задачи решаются с использованием методов и математического аппарата теории инерциальной навигации, теории дифференциальных уравнений, теории автоматического управления, теории устойчивости, методов системного анализа, методов математического моделирования и экспериментальных исследований.
Научная новизна:
- построены алгоритмы функционирования бесплатформенной инерциальной системы ориентации и навигации с учетом влияния углового смещения продольной оси ВСД относительно оси трубопровода;
- методами математического моделирования и сопоставительного анализа определены границы применимости настройки на частоту Шулера и выработаны рекомендации по требуемой точности ДПИ при решении задачи ориентации ВСД двумя разновидностями алгоритмов ориентации на основе дифференциальных кинематических уравнений Эйлера с введенными членами коррекции, отличающимися использованием угловых скоростей и кажущихся ускорений в проекциях на оси объектового или горизонтного базисов, в условиях движения основания с малыми (< 20°) и большими (> 20°) углами тангажа;
- выведены конечные формулы ошибок БИСОН в зависимости от углового смещения, в которых в явном виде показана зависимость от угла крена ошибок определения параметров ориентации, обусловленных угловым смещением;
- разработаны алгоритмы и способы идентификации и компенсации углового смещения продольной оси ВСД относительно оси ТП:
- аналитически и экспериментально показано, что идентификация углового смещения возможна на основе выявления корреляции изменения оценок углов тангажа и азимута от оценок угла крена, т.е. только по выходным параметрам БИСО, а также что использование сведений о рельефе местности позволяет оценивать угловое смещение при отсутствии вращения ВСД;
- аналитически и экспериментально произведена оценка эффективности применения алгоритмов и способов компенсации влияния углового смещения продольной оси снаряда относительно оси трубопровода на точность позиционирования ТП.
Достоверность результатов обеспечивается корректностью математической постановки задач, строгостью применяемых методов решения, подтверждением основных теоретических предпосылок результатами математического моделирования и эксперимента.
На защиту выносятся:
- математические модели работы БИСОН с учетом влияния углового смещения продольной оси ВСД относительно оси трубопровода;
- математические модели ошибок функционирования БИСО для алгоритмов двух разновидностей с учетом влияния углового смещения и законы формирования ошибок оценок параметров ориентации от углового смещения;
- обоснование границ применимости настройки на частоту Шулера и выработанные рекомендации по требуемой точности ДПИ для алгоритмов ориентации на основе корректируемых кинематических уравнений Эйлера с приведенными к объектовому или горизонтному базисам параметрами ориентации, в условиях движения основания с малыми (< 20°) и большими (> 20°) углами тангажа;
- алгоритмы и способы идентификации и компенсации влияния углового смещения на основе корреляции изменения углов тангажа и азимута от угла крена при наличии углового смещения и с использованием сведений о рельефе местности.
Практическая ценность. На основе проведенного сопоставительного анализа алгоритмов ориентации в виде дифференциальных кинематических уравнений Эйлера с введенными членами коррекции с приведенными к объектовому и горизонтному базисам членами ориентации выработаны рекомендации по требуемой точности ДПИ для решения задачи ориентации ВСД, необходимые при проектировании БИСО повышенной точности для ВСД.
Разработанные алгоритмы и способы идентификации и компенсации влияния углового смещения продольной оси ВСД относительно оси ТП позволяют снизить требования по жесткости к манжетам (что улучшает эксплуатационные параметры ВСД) и существенно уменьшить погрешности определения координат ТП без изменений конструкции ВСД и состава бортового оборудования (за счет использования избыточности информации).
Исследования эффективности двух разновидностей алгоритмов ориентации были использованы при совершенствовании и оптимизации алгоритмов работы бесплатформенных систем ориентации для внутритрубных навигационных инспектирующих снарядов ЗАО «Газприборавтоматикасервис».
Способы и алгоритмы идентификации и компенсации влияния углового смещения внедрены в технологию навигационного обследования трубопроводов всех диаметров средствами внутритрубной дефектоскопии ЗАО «Газприборавтоматикасервис».
Апробация работы. Основные положения и результаты по работе докладывались на следующих конференциях:
- VIII конференция молодых ученых «Навигация и управление движением» (Санкт-Петербург, ЦНИИ «Электроприбор», 2006);
- Юбилейная X конференция молодых ученых «Навигация и управление движением» (Санкт-Петербург, ЦНИИ «Электроприбор», 2008);
- XXI Международная научная конференция «Математические методы в технике и технологиях» (Саратов, СГТУ, 2008);
- XV Санкт-Петербургская международная конференция по интегрированным навигационным системам (Санкт-Петербург, ЦНИИ «Электроприбор», 2008);
- XXII Международная научная конференция «Математические методы в технике и технологиях» (Саратов, СГТУ, 2009);
- XXVI Международная научная конференция «Математические методы в технике и технологиях» (Саратов, СГТУ, 2013),
а также на научных семинарах кафедры «Приборостроение» СГТУ (2005-2013 гг.).
Публикации. Основные результаты диссертационной работы опубликованы в 12 печатных работах. Из них 2 статьи в изданиях, рекомендованных в действующем перечне ВАК РФ, 1 патент РФ, 7 докладов в сборниках международных и всероссийских конференций, 1 работа депонирована в ВИНИТИ. Также зарегистрирован 1 программный продукт.
Структура и объем работы. Диссертация состоит из введения, пяти глав, заключения, списка использованной литературы. Общий объем диссертации составляет 147 страниц, включая 38 рисунков.
СОДЕРЖАНИЕ РАБОТЫ
Во введении обосновывается актуальность темы исследований, формулируются цель, конкретные задачи и направления исследований, научная новизна, практическая значимость исследований, основные результаты, выносимые на защиту, приводится обзор содержания диссертации.
В первой главе приводится обзор трудов по теории и практике повышения точности решения задач ориентации ВСД и позиционирования ТП.
Приводятся описания различных уравнений ориентации, применяемых при исследовании трубопроводов. Производится обзор существующих инерциальных датчиков, применяемых в составе БИСО для ВСД, а также обзор известных методов и способов повышения точности алгоритмов работы бесплатформенных инерциальных систем ориентации. Поставлены и обоснованы задачи диссертационного исследования.
Во второй главе описан подвижный объект – внутритрубный снаряд-дефектоскоп (ВСД), на котором устанавливается БИСО, интегрированная со спутниковой навигационной системой (СНС), одометрами и магнетометрами. Приведен анализ условий работы БИСО в составе ВСД, построены ее физическая и математическая модели. При этом выводятся две разновидности алгоритмов функционирования БИСО с учетом влияния углового смещения ВСД относительно продольной оси трубопровода. Приводятся алгоритмы системы навигации по сигналам одометра и приборов и систем неинерциальной природы. Функциональная схема ВСД с установленной на его борту БИСО, одометрами, а также другими наземными приборами и системами приведена на рис. 1.
Рис. 1. Функциональная схема ВСД с установленной на его борту БИСО
Структура системы ориентации и навигации внутритрубного средства дефектоскопии включает две подсистемы: бортовую и наземную. Бортовая подсистема включена непосредственно в состав внутритрубного снаряда-дефектоскопа и содержит: БИСО в виде инерциального модуля (ИМ), включающего трехкомпонентный гироскопический измеритель абсолютной угловой скорости (ТГИУС) и трехкомпонентный измеритель кажущегося ускорения (ТИКУ), а также одометр и бортовой компьютер. К наземной части относятся неинерциальные геодезические приборы и системы (приемники спутниковой навигационной системы, трассоискатели в виде магнитометров и др.) навигации и привязки элементов и дефектов трубопровода к координатам местности.
При анализе условий работы были использованы натурные данные БИСО в составе ВСД производства ЗАО «Газприборавтоматикасервис» и других приборов и систем по 40 участкам магистральных трубопроводов. Условия работы характеризуются следующими данными:
- поступательная скорость движения снаряда, как правило, составляет не более 4-5 м/с, в отдельных случаях при несоблюдении скоростного режима, при попадании на пути снаряда сложнопреодолимых препятствий могут наблюдаться полные остановки ВСД (иногда длительностью до 0.5-1 часа), а после прохождения препятствий рывки до 20-40 м/с;
- параметры вращения нестабильны, в некоторых случаях наблюдается равномерное вращение с периодами 100-300 с/об, в некоторых случаях наблюдаются плавные повороты по крену на углы от 1° до 360° за весь участок пути, в некоторых случаях вращение отсутствует вовсе;
- значения угла тангажа зависят в основном от рельефа местности и, как правило, не превышают 60°;
- угол курса также зависит от естественных препятствий при прокладке газопровода, которые необходимо было преодолеть, и его значение может достигать 90°;
- при прохождении внутри трубопровода дефектоскоп, как правило, испытывает перегрузки с возможными кратковременными торможениями и разгонами до 10g, также могут наблюдаться вибрации, зависящие от проката стали, загрязненности трубы и соблюдения режима пропуска снаряда.
Построены физическая и математическая модели работы системы ориентации и навигации ВСД на основе комплексирования данных БИСО и одометров, установленных на его борту, с данными неинерциальных геодезических приборов и систем (приемников СНС и трассоискателей).
К особенностям физической модели следует отнести следующее:
1. Использование режима постобработки информации:
- во время пропуска ВСД по трубопроводу на устройство памяти (флэш-диск) с помощью бортового компьютера записываются оцифрованные сигналы всех бортовых измерительных систем, в том числе инерциальных датчиков (ТГИУС и ТИКУ), одометрической измерительной системы, датчиков дефектов или профильных датчиков;
- после пропуска на стационарном персональном компьютере проводится комплексный анализ всех записей, при необходимости предварительная обработка сигналов и оценка режимов движения ВСД. Далее по инерциальной и одометрической информации с привлечением информации о пространственном положении маркерных (характерных) точек трубопровода решаются задачи ориентации и навигации. На этом этапе режим постобработки позволяет реализовать итерационные алгоритмы вычисления, при этом сначала оцениваются инструментальные погрешности измерительных средств, а на последующих итерациях они компенсируются. Комплексный анализ решения задачи ориентации и навигации и результатов дефектоскопии позволяет оптимизировать алгоритмы ориентации и навигации, с одной стороны, и повысить достоверность результатов дефектоскопии – с другой.
2. Доступность одометрической информации позволяет при решении задачи навигации использовать методы счисления координат по приращениям сигналов одометра и результатам решения задачи ориентации. Это снижает требования по точности к инерциальным датчикам на порядок и более.
3. В отличие от наиболее распространенных способов применения инерциальных модулей на подвижных объектах в данном случае требуется решить задачи ориентации и навигации не для самого подвижного объекта – ВСД, а для трубопровода, по которому он движется. При этом следует отметить, что между осью трубопровода и соответствующей осью инерциального модуля, как правило, присутствует угловое смещение порядка 1° (что зачастую значительно превышает погрешности БИСО). В результате этого приходится решать задачу ориентации и навигации при использовании исходной информации в различных измерительных базисах (одометрическая – в трубной системе координат, инерциальная – в приборной системе координат). Нескомпенсированное угловое смещение данных базисов может приводить к значительным погрешностям определения пространственных координат трубопроводов (до десятков метров).
При построении математической модели выводятся две разновидности алгоритмов функционирования БИСО с учетом влияния углового смещения ВСД относительно продольной оси трубопровода.
Вводится в рассмотрение связанная с ВСД система координат Ou1u2u3, развернутая относительно трубы (рис. 2).
Алгоритмы функционирования центрального компьютера при решении задачи ориентации с приведением угловых скоростей к осям объектового трехгранника (1-я разновидность) с учетом углового смещения продольной оси ВСД относительно оси трубопровода:
 (1)
(1)
 (2)
(2)
где ![]() – оценки параметров ориентации по крену, тангажу и рысканию;
– оценки параметров ориентации по крену, тангажу и рысканию; ![]() – оценки угловой скорости и кажущегося ускорения в системе координат Х;
– оценки угловой скорости и кажущегося ускорения в системе координат Х; ![]() – углы смещения соответствующих осей системы координат Х относительно системы координат U;
– углы смещения соответствующих осей системы координат Х относительно системы координат U; ![]() – угловые скорости коррекции по осям крена и тангажа;
– угловые скорости коррекции по осям крена и тангажа; ![]() – коэффициенты позиционной и интегральной (индекс I) коррекции;
– коэффициенты позиционной и интегральной (индекс I) коррекции; ![]() – переносные угловые скорости:
– переносные угловые скорости:
 , (3)
, (3)
где U – модуль вектора угловой скорости вращения Земли; ![]() – оценка географической широты местности;
– оценка географической широты местности; ![]() – матрица направляющих косинусов оценок углов ориентации ВСД относительно горизонтной системы координат имеет вид
– матрица направляющих косинусов оценок углов ориентации ВСД относительно горизонтной системы координат имеет вид
 (4)
(4)
Алгоритмы функционирования БИСО второй разновидности с приведением угловых скоростей и кажущихся ускорений к осям горизонтного трехгранника при наличии углового смещения продольной оси ВСД относительно оси трубопровода имеют вид
 (5)
(5)
 (6)
(6)
 (7)
(7)
 (8)
(8)
где ![]() – оценки угловой скорости и кажущегося ускорения в системе координат ;
– оценки угловой скорости и кажущегося ускорения в системе координат ; ![]() – угловые скорости коррекции по осям
– угловые скорости коррекции по осям ![]() соответственно;
соответственно; ![]() – коэффициенты позиционной и интегральной (индекс I) коррекции;
– коэффициенты позиционной и интегральной (индекс I) коррекции;  –начальные значения угловых скоростей;
–начальные значения угловых скоростей; ![]() – элементы матрицы направляющих косинусов оценок углов ориентации
– элементы матрицы направляющих косинусов оценок углов ориентации ![]() .
.
В третьей главе строятся и решаются уравнения ошибок для выведенных алгоритмов функционирования БИСОН, находятся аналитическим путем формулы для составляющих их ошибки от углового смещения.
Выведенная математическая модель ошибок ![]() БИСО для алгоритмов ориентации первой разновидности имеет вид
БИСО для алгоритмов ориентации первой разновидности имеет вид


 Математическая модель ошибок
Математическая модель ошибок ![]() БИСО для алгоритмов ориентации второй разновидности получена в следующей форме:
БИСО для алгоритмов ориентации второй разновидности получена в следующей форме:

Подчеркнутые члены в (9) и (10) характеризуют влияние углового смещения продольной оси ВСД относительно оси трубопровода на ошибки функционирования БИСО.
Условия асимптотической устойчивости решений уравнений ошибок (9) сводится к выполнению условий ![]() ,
, ![]() .
.
Для модели ошибок (10), если начальные значения этих ошибок ![]() ,
, ![]() ,
, ![]() являются малыми, при
являются малыми, при ![]() ,
, ![]() обеспечивается асимптотическая устойчивость по Гурвицу частных решений первых двух уравнений. В каждом из двух первых уравнений в (10) возможно выполнение условий Шулера. По углу имеет место неасимптотическая устойчивость.
обеспечивается асимптотическая устойчивость по Гурвицу частных решений первых двух уравнений. В каждом из двух первых уравнений в (10) возможно выполнение условий Шулера. По углу имеет место неасимптотическая устойчивость.
Математическая модель ошибок ![]() БИСО и при равномерном движении и вращении ВСД по крену (
БИСО и при равномерном движении и вращении ВСД по крену (![]() ) получена из (10) и имеет вид
) получена из (10) и имеет вид
Здесь подчеркиванием выделены составляющие погрешностей работы БИСО, вносимые угловым смещением продольной оси ВСД относительно оси трубопровода. Для определения характера влияния параметров углового смещения на ошибки БИСО элементы, характеризующие переходные процессы в решениях уравнений (11), не учитываются, рассматриваются ошибки в установившемся движении. На основе анализа решений уравнений ошибок были выведены формулы для ошибок оценок параметров ориентации от углового смещения для установившегося движения, справедливые для обеих разновидностей алгоритмов ориентации, в двух случаях:
- Использование алгоритмов ориентации с введенными членами позиционной и интегральной коррекции (
 ,
,  ):
):
![]() ,
, ![]() . (12)
. (12)
- Использование алгоритмов ориентации без интегральной коррекции (
 ,
,  ):
):
![]() ,
, ![]() . (13)
. (13)
Влияние углового смещения на погрешности задачи позиционирования трубопровода при ![]() аналитически записываются в следующем виде для двух случаев использования коррекции:
аналитически записываются в следующем виде для двух случаев использования коррекции:
| 1. Введение интегральной коррекции: | 2. Отсутствие интегральной коррекции: | |
 |  | (14) |
где ![]() – приращение продольной координаты (дистанции) на шаге опроса.
– приращение продольной координаты (дистанции) на шаге опроса.
В работе предлагаются два способа идентификации и компенсации углового смещения продольной оси ВСД относительно оси трубопровода – для вращающегося и не вращающегося по крену ВСД, когда ![]() .
.
В первом способе предлагается определять параметры углового смещения продольной оси ВСД относительно строительной оси трубопровода по результатам предварительного решения задачи навигации на основе корреляции ошибок определения углов тангажа и рыскания, вызванных угловым смещением, с изменением угла крена.
По результатам решения задачи навигации методом счисления пути определяется угол наклона вычисленной траектории к плоскости горизонта
 , (15)
, (15)
где ![]() – оценка приращения высоты на шаге опроса по сигналам одометров;
– оценка приращения высоты на шаге опроса по сигналам одометров; ![]() – оценка приращения продольной координаты (дистанции) на шаге опроса.
– оценка приращения продольной координаты (дистанции) на шаге опроса.
С учетом углового смещения угол наклона траектории представляется в виде
![]() , (16)
, (16)
где ![]() – истинный угол тангажа ВСД,
– истинный угол тангажа ВСД, ![]() – составляющая погрешности от углового смещения продольной оси ВСД относительно оси трубопровода,
– составляющая погрешности от углового смещения продольной оси ВСД относительно оси трубопровода, ![]() – прочие погрешности оценки тангажа (обусловленные инструментальными погрешностями инерциальных датчиков и одометрической системы, баллистическими погрешностями системы ориентации, погрешностями тракта преобразования информации, вычислительными погрешностями алгоритмов и пр.).
– прочие погрешности оценки тангажа (обусловленные инструментальными погрешностями инерциальных датчиков и одометрической системы, баллистическими погрешностями системы ориентации, погрешностями тракта преобразования информации, вычислительными погрешностями алгоритмов и пр.).
Используется оценка погрешности от углового смещения в виде формулы (12):
![]() . (17)
. (17)
Для компенсации погрешности от углового смещения продольной оси ВСД относительно оси трубопровода необходимо определить его параметры ![]() и
и ![]() .
.
Для определения параметров углового смещения предлагается аппроксимировать реализацию (15) с помощью функции (17), осуществляя фильтрацию остальных составляющих (16), например, методом наименьших квадратов.
При повторном просчете трассы осуществляется компенсация углового смещения путем введения в алгоритмы ориентации корректирующих членов кажущихся ускорений и угловых скоростей:
 (18)
(18)
Основными условиями использования представленного способа являются:
- Наличие вращательного движения ВСД вокруг продольной оси во время обследования участка трубопровода, что достаточно часто выполняется. При соблюдении определенных конструктивных решений вращение может быть обеспечено постоянно. При отсутствии вращения или при нерегулярном вращении данным способом невозможно определить величину углового смещения.
- Для исключения потери части информации о рельефе местности и тем самым снижения точности из-за предварительной фильтрации вычисленного угла тангажа при использовании данного способа для нахождения параметров углового смещения необходимо выбирать участки траектории с незначительным изменением рельефа местности.
В случае отсутствия вращательного движения ВСД (![]() ) предлагается второй способ снижения погрешности определения высотной координаты трубопровода (в том числе и из-за углового смещения).
) предлагается второй способ снижения погрешности определения высотной координаты трубопровода (в том числе и из-за углового смещения).
В данном способе предлагается использовать сведения о рельефе местности. Данные сведения могут быть получены, например, методом геодезических измерений координат доступных участков осевой линии трубопровода. Специалистами измеряется высота грунта над трубопроводом с шагом 10-100 м (в зависимости от протяженности участка и сложности рельефа) и в этих точках трассоискателем измеряется глубина залегания трубопровода. Таким образом, получается высота осевой линии трубы в точках измерения:
![]() (19)
(19)
Основной вклад в погрешности таких измерений вносит погрешность определения глубины залегания трубопровода (равная погрешности работы трассоискателя ±0.5 м). Для уменьшения влияния этой погрешности и получения непрерывного массива исходных геоинформационных данных предлагается аппроксимировать массив (19) методом наименьших квадратов многочленом:
![]() , (20)
, (20)
где  – расстояние между точками геодезических измерений; А, В, С – коэффициенты, несущие информацию о параметрах составляющей ошибки определения высотной координаты.
– расстояние между точками геодезических измерений; А, В, С – коэффициенты, несущие информацию о параметрах составляющей ошибки определения высотной координаты.
Аппроксимация производится на участках ограниченной длины (50…150 м), имеющих небольшое изменение рельефа местности, при условии, когда mn (n – количество точек геоинформационных измерений; m – количество точек, участвующих в построении аппроксимирующего многочлена). Для ограничения порядка аппроксимирующего многочлена при сохранении необходимой точности используется метод аппроксимации сплайн-функциями.
После аппроксимации получается непрерывный массив высот, который на каждом шаге решения задачи позиционирования сравнивается с инерциальными данными. Затем формируется корректировка угла тангажа и, вычитая ее на следующей итерации из значения, полученного инерциальным путем, производится компенсация погрешности определения угла тангажа (в том числе и от углового смещения), тем самым увеличивается точность определения высотной координаты.
Стоит отметить, что не всегда есть возможность измерить координаты на всем участке трубопровода, например, на подводных переходах, в гористой или болотистой местности. В таком случае корректировка производится на доступных участках и полученный корректирующий угол тангажа применяется при инерциальном просчете на недоступном участке.
В четвертой главе методом математического моделирования произведено исследование двух разновидностей алгоритмов ориентации на основе дифференциальных кинематических уравнений Эйлера с введенными членами коррекции. При работе автономной БИСО рассматривались два типа алгоритмов ориентации. Исследовались методические погрешности, а также оценка погрешностей определения параметров ориентации в зависимости от уровня погрешностей датчиков первичной информации (ДПИ), при режиме движения с малыми (<20°) и большими (>20°) углами тангажа.
Показано, что при условии использования в БИСО идеальных датчиков погрешности определения параметров ориентации без настройки на частоту Шулера для алгоритмов в горизонтной системе координат совпадают с погрешностями определения параметров ориентации в алгоритмах с приведением сигналов к объектовому базису. При настройке алгоритмов второго типа на частоту Шулера методические погрешности значительно уменьшаются (рис. 3).
![]()

Рис. 3. Ошибки оценивания угла азимута
Результаты проведенных исследований показали, что алгоритмы 1-й разновидности требуют меньшее время выставки, но обладают погрешностями в канале азимута, связанными с эффектом детектирования кинематических параметров движения объекта. Алгоритмы 2-й разновидности исключают данные азимутальные погрешности, и позволяют реализовать настройку системы на период Шулера, что исключает баллистические погрешности и спровоцированные ими кардановые погрешности. Таким образом, алгоритмы 2-й разновидности обеспечивают более высокую точность выходных данных БИСО.

Также проводилось моделирование случая использования в обеих разновидностях алгоритмов позиционной и интегральной коррекции. Доказаны аналитические предпосылки, что введение интегральной коррекции в алгоритмы 1-го типа приводит к ухудшению их результативности, что свидетельствует о невозможности настройки алгоритмов в объектовых осях на частоту Шулера.
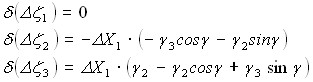
Для выявления параметров ДПИ, оказывающих наибольшее влияние на точность решения задачи ориентации, было проведено математическое моделирование работы БИСО с поочередным варьированием точностных параметров ДПИ (при нулевых прочих погрешностях). На рис. 4 в качестве примера приведены зависимости погрешностей определения угла крена от величины нулевого сигнала акселерометров (a) и дрейфа гироскопов (б).
Анализ показал, что для БИСО, состоящей из ГИУС прецизионного класса точности (o<0.01°/час, Km<10-5) и ИКУ прецизионного (Wo<10-5g, Km<10-5) или среднего (Wo =10-510-3g, Km=10-410-3) классов точности, наиболее целесообразно в качестве алгоритмов функционирования использовать кинематические уравнения Эйлера с настройкой на период Шулера и предварительным приведением сигналов ДПИ к горизонтному базису, т.к. в данном случае погрешности определения углов ориентации меньше, чем при использовании алгоритмов 1 типа (в 2 раза по каналу азимута, на 2 порядка по каналу тангажа и на 2…3 порядка по каналу крена).
При использовании в качестве ДПИ акселерометров грубого класса точности, а гироскопов среднего и грубого класса точности настройка на период Шулера становится невозможной, вследствие чего уровень погрешностей определения параметров ориентации с использованием алгоритмов 1-го типа и алгоритмов 2-го типа становится соразмерным. Следовательно, при таком наборе ДПИ тип используемых алгоритмов не влияет на точность решения задачи ориентации.
При сравнительном исследовании методических погрешностей двух разновидностей алгоритмов работы БИСО для режимов движения основания с большими углами тангажа (20°…60°) показано, что методические погрешности определения параметров ориентации при таком движении с использованием алгоритмов 2-й разновидности на 2..3 порядка меньше, чем при использовании алгоритмов первой разновидности, что соответствует значениям от 10-5 угл.град до 10-4 угл.град для алгоритмов 2-й разновидности против 10-2…10-1 угл.град для алгоритмов 1-й разновидности. Также результаты моделирования показали, что уровень погрешностей определения параметров ориентации с использованием алгоритмов 1-й разновидности на 2 порядка (по осям рыскания и крена) и на 3 порядка (по оси тангажа) ниже, чем при использовании алгоритмов 2-й разновидности.
Также математическим моделированием было произведено исследование эффективности применения способа и алгоритмов компенсации погрешностей, связанных с угловым смещением продольной оси ВСД относительно оси ТП на основе их корреляции с креном. Показано, что при значительном изменении рельефа местности точность определения параметров углового смещения осей снижается, увеличение количества оборотов в 10 раз на исследуемом участке приводит к уменьшению погрешности определения параметров углового смещения по амплитуде и фазе в 3 раза. Это говорит о том, что при использовании данного метода в реальных условиях необходимо избегать в расчетах участков трасс, где наблюдается существенное изменение рельефа (> 3…5 м), а также необходимым условием является наличие вращения снаряда по крену с периодом не менее 100-300 м за оборот.
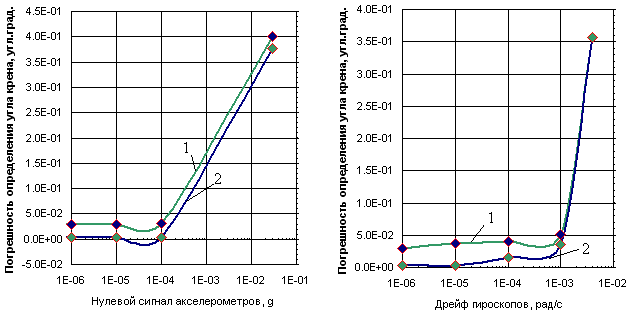
В пятой главе представлены результаты проверки алгоритмов ориентации с использованием угловых скоростей в объектовом и горизонтном базисе на основе натурных записей реальных ДПИ в составе реального ВСД. Показано, что для ВСД, в состав которого входят трехкомпонентный гироскопический измеритель угловой скорости ПНСК 40-016 и три кварцевых акселерометра КХ-067, при отключении настройки на частоту Шулера алгоритмов ориентации с использованием угловых скоростей в горизонтном базисе оба типа алгоритмов работают адекватно, уровень погрешностей определения углов ориентации одинаков (разница в значениях угла тангажа достигает 0.5°, в значениях угла азимута – до 0.4°). Кривые плановой и профильной (рис. 5) траектории трубопровода практически полностью совпадают. В контрольных точках погрешность определения высотной координаты при использовании обеих разновидностей алгоритмов ориентации составляет не более 0.5 м, что является достаточной для практики точностью.
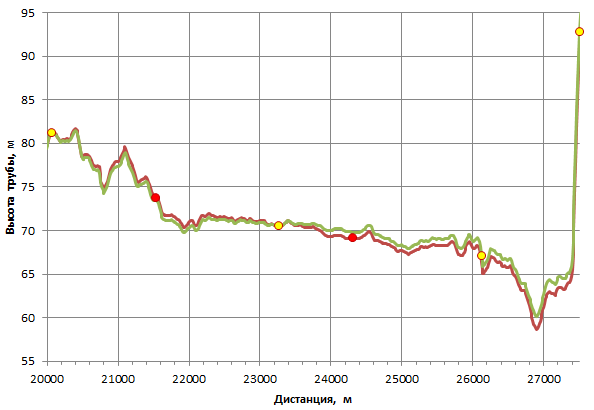
Рис. 5. Профиль участка МГ Ямбург – Западная граница по результатам просчета
с использованием двух типов алгоритмов
Также было проведено исследование достижимой точности идентификации и компенсации погрешностей определения координат трубопровода из-за наличия углового смещения продольной оси ВСД относительно оси трубопровода при обследовании трубопроводов различных диаметров.
В качестве примера приведено обследование участка трубопровода (рис. 6) внутритрубным дефектоскопом Крот СК700, оснащенным средством навигационно-топографическим СИТ-700, производства ЗАО «Газприборавтоматикасервис». Показано, что в контрольных точках погрешность определения высотной координаты снижается до 0.3…0.5 м при компенсации влияния углового смещения продольной оси ВСД относительно оси ТП. Причем для протяженных трасс, где есть возможность разбиения просчета на участки и определения параметров углового смещения для каждого участка, точность увеличивается в 1.5-2 раза по сравнению с определением средних параметров на всю трассу (рис. 6).
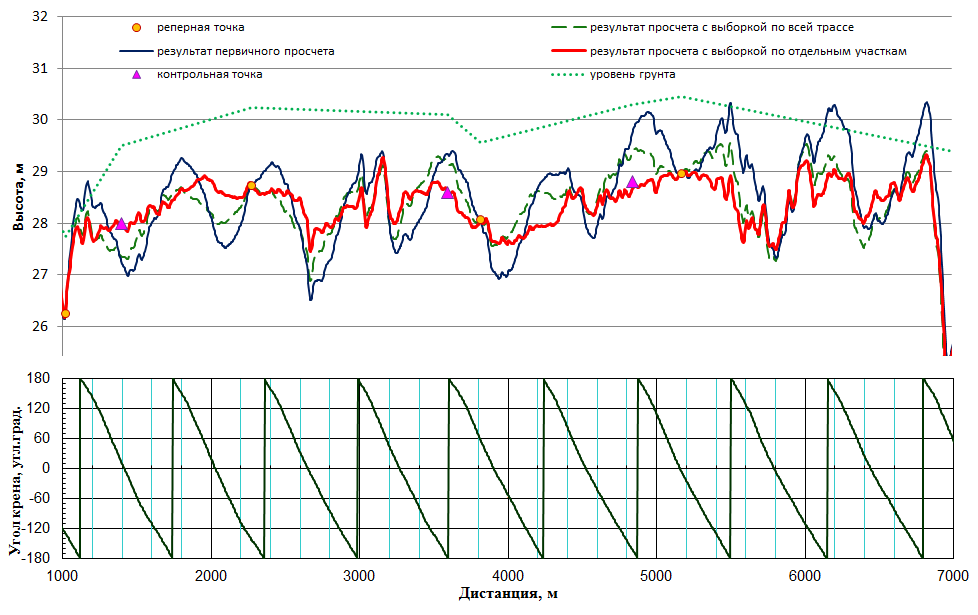
Рис. 6. Изменение высотной координаты и угла крена по дистанции, полученное в результате
первичного просчета трассы и после идентификации и компенсации углового смещения продольной оси
ВСД и оси трубопровода
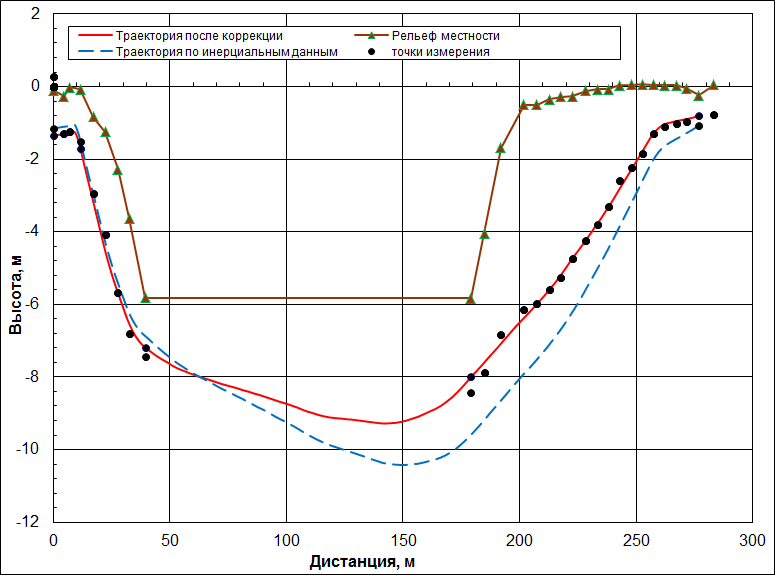
Рис. 7 Результат обследования подводного перехода через р. Паша
с использованием сведений о рельефе местности
В качестве примера внедрения способа компенсации погрешности определения высотной координаты с использованием сведений о рельефе местности приведено обследование подводного перехода через р. Паша. Геодезические координаты и глубина залегания трубопровода были измерены специалистами с дискретностью порядка 5-10 м на правом и левом берегах реки, что позволило оценить и компенсировать погрешность определения угла тангажа и, как следствие, повысить точность определения высотной координаты с 1...1.5 м до 15…40 см (рис. 7).
Экспериментально показано, что при существующем наборе инерциальных датчиков первичной информации в составе ВСД использование алгоритмов ориентации 1-й и 2-й разновидностей показывают равнозначную точность, что является подтверждением выводов математического моделирования. Также показано, что погрешность определения высотной координаты от углового смещения продольной оси ВСД относительно оси трубопровода может составлять 1…3 м, предложенные способы позволяют снизить данную погрешность до 0.2…0.5 м, что является достаточной для практики точностью.
В заключении сформулированы основные выводы диссертационной работы:
- Построены две разновидности алгоритмов функционирования бесплатформенной системы ориентации и навигации с учетом влияния углового смещения продольной оси ВСД относительно оси трубопровода;
- Методами математического моделирования и сопоставительного анализа проведено исследование указанных разновидностей алгоритмов функционирования бесплатформенной инерциальной системы ориентации на основе дифференциальных кинематических уравнений Эйлера с введенными членами горизонтальной коррекции с использованием угловых скоростей в проекциях на оси объектового (1-я разновидность) или горизонтного (2-я разновидность) трехгранников:
- показано, что в алгоритмах 1-й разновидности при наклонах основания >20° нарушается настройка на период Шулера, что приводит к увеличению их методических погрешностей на 2..3 порядка по отношению к алгоритмам второй разновидности (от 10-2 угл. град до 10-1 угл. град против 10-5…10-4 угл. град);
- при сопоставительном анализе методических погрешностей с инструментальными установлено, что при нестабильности скорости дрейфа гироскопов более 2°/ч влияние инструментальных погрешностей на ошибки оценок параметров ориентации сопоставимо с методическими погрешностями алгоритмов 1-й разновидности, т.е. применение алгоритмов 2-й разновидности эффективно при нестабильности скорости дрейфа гироскопов менее 1°/ч.
- Выведены конечные формулы ошибок БИСОН в зависимости от углового смещения продольной оси ВСД относительно оси трубопровода при наличии и отсутствии интегральной коррекции:
- показано, что данная погрешность обусловлена использованием разных измерительных базисов БИСО и одометрической системы ВСД и может составлять до нескольких метров в плане и профиле;
- в явном виде показана зависимость от угла крена ошибок определения параметров ориентации, обусловленных угловым смещением;
- при отсутствии интегральной коррекции отсутствует постоянная составляющая погрешности.
- Предложены, исследованы и внедрены алгоритмы и способы идентификации и компенсации влияния углового смещения:
- показано, что на основе исследования корреляции изменения углов тангажа и азимута от угла крена и применения метода наименьших квадратов возможно определение параметров углового смещения, что приводит к снижению погрешности позиционирования трубопровода до 30…50 см, что приемлемо в практическом плане;
- показано, что использование сведений о рельефе местности позволяет существенно снизить влияние различных погрешностей (в том числе и от углового смещения) на точность определения высотной координаты трубопровода до 15…40 см.
- применение данных способов в практике обследования МГ позволило снизить погрешность позиционирования трубопроводов с 1..3 до 0.2…0.5 м. Разработанные способы внедрены в ЗАО «Газприборавтоматикасервис» в технологию внутритрубной дефектоскопии и навигации. С их использованием успешно произведено обследование более 7000 км магистральных трубопроводов.
Основное содержание диссертационной работы отражено в следующих публикациях:
Статьи в российских рецензируемых научных журналах, рекомендуемых ВАК РФ
- Копичева, А.А. О границах применимости настройки на частоту Шулера в алгоритмах бесплатформенной системы ориентации на основе кинематических уравнений Эйлера с введенными членами горизонтальной коррекции / А.А. Копичева // Вестник Саратовского государственного технического университета. – 2009. – № 4 (42). Вып. 1. – С. 129-135.
- Копичева, А.А. О выборе предпочтительной разновидности алгоритмов функционирования бесплатформенной инерциальной системы ориентации на основе кинематических уравнений Эйлера с введенными членами горизонтальной коррекции в условиях движения объекта с большими углами тангажа / А.А. Копичева // Вестник Саратовского государственного технического университета. – 2013. – № 2 (70). Вып. 1. – С. 53-59.
Патенты и государственные свидетельства
- Патент РФ №2437127 от 07.06.2010. Система определения координат трассы подземного трубопровода / В.Б. Никишин, А.И. Синев, П.Г. Чигирев, А.В. Ульянов, С.П. Никишина, А.А, Копичева.
- Копичева, А.А. Идентификация углового смещения внутритрубного инспектирующего снаряда / В.Б. Никишин, М.Н. Карпов, А.И. Синев, В.С. Шорин, А.А. Копичева. Свидетельство о государственной регистрации программы для ЭВМ №2013615323 от 04.07.2013.
Прочие публикации
- Копичева, А.А. Модели ошибок системы ориентации при проецировании кинематических параметров на оси различных базисов / П.К. Плотников, В.Б. Никишин, А.А. Копичева // Математические методы в технике и технологиях ММТТ-22: сб. тр. XXII Междунар. науч. конф. – Т. 9. – Саратов: Сарат. гос. тех. ун-т, 2009. – С. 200-201.
- Копичева, А.А. Сравнительный анализ алгоритмов ориентации на основе кинематических уравнений Эйлера / А.А. Копичева, А.В. Ульянов, В.Б. Никишин // Навигация и управление движением: материалы докладов VIII конференции молодых ученых / науч. ред. д.т.н. О.А. Степанов; под общ. ред. акад. В.Г. Пешехонова. – СПб: ГНЦ РФ ЦНИИ «Электроприбор», 2007. – С. 386.
- Копичева, А.А. Сопоставительный анализ основных метрологических параметров внутритрубных снарядов-профилемеров / В.Ю. Буров, В.Б. Никишин, А.А. Копичева // Навигация и управление движением: материалы докладов Юбилейной Х конференции молодых ученых / науч. ред. д.т.н. О.А. Степанов; под общ. ред. акад. В.Г. Пешехонова. – СПб: ГНЦ РФ ЦНИИ «Электроприбор», 2008. – С. 380-385.
- Копичева, А.А. Компенсация погрешностей определения пространственного положения магистрального трубопровода / Никишин В.Б., Карпов М.Н., Копичева А.А., Панченко С.Ю. // Математические методы в технике и технологиях – ММТТ-25: сб. тр. Т. 6. Секция 10 / под общ. ред. А.А. Большакова. – Волгоград: Волгогр. гос. техн. ун-т, 2012. –С. 95-98.
- Копичева, А.А. Исследование системы ориентации, использующей интегральную информацию о движении объекта / В.С. Шорин, А.А. Копичева, П.Г. Чигирев, А.В. Ульянов// Математические методы в технике и технологиях – ММТТ-21: сб. тр. XXI Междунар. науч. конф.: в 10 т. – Т. 7. Секции 9, 14 / под общ. ред. В.С. Балакирева. – Саратов: Сарат. гос. техн. ун-т, 2008. – С. 278.
- Копичева, А.А. Применение инерциального микромеханического модуля для измерения параметров магистральных газопроводов / В.Б. Никишин, А.И. Синев, А.В. Мельников, П.Г. Чигирев, А.В. Ульянов, В.Ю. Буров, А.А. Копичева // Сборник материалов Юбилейной XV Санкт-Петербургской международной конференции по интегрированным навигационным системам. – СПб: ГНЦ РФ ЦНИИ «Электроприбор», 2008. – С. 342.
- Копичева, А.А. Математическая модель прецизионного кварцевого маятникового акселерометра / В.А. Акеев, Д.М. Калихман, А.А. Копичева // Навигация
и управление движением: материалы докладов VIII конференции молодых ученых / науч. ред. д.т.н. О.А. Степанов; под общ. ред. академика В.Г. Пешехонова. – СПб: ГНЦ РФ ЦНИИ «Электроприбор», 2007. – С. 386. - Копичева, А.А. Анализ развития гироскопических компасов / А.А. Копичева, В.Ю. Чеботаревский, А.В. Михеев. Деп. в ВИНИТИ. – 14.12.2004. – №1982 – В2004.
Подписано в печать 19.11.13 Формат 60x84 1/16
Бум. офсет Усл. печ. л. 1,0 Уч.-изд. л. 1,0
Тираж 100 экз. Заказ 199 Бесплатно
Саратовский государственный технический университет
410054, Саратов, Политехническая ул., 77
Отпечатано в издательстве СГТУ. 410054, Саратов, Политехническая ул., 77
Тел.: 24-95-70, 99-87-39, e-mail: [email protected]