

Унифицированные электромагнитные датчики перемещений для систем специального назначения
На правах рукописи
ТРОФИМОВ Алексей Анатольевич
Унифицированные электромагнитные датчики перемещений для систем специального назначения
Специальность 05.11.16 – Информационно-измерительные
и управляющие системы (приборостроение)
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
доктора технических наук
Пенза 2011
Работа выполнена в государственном образовательном учреждении высшего профессионального образования «Пензенский государственный университет».
Научный консультант – доктор технических наук, профессор
Цыпин Борис Вульфович.
Официальные оппоненты: доктор технических наук, профессор
Гречишников Владимир Михайлович;
доктор технических наук, профессор
Ураксеев Марат Абдулович;
доктор технических наук, профессор
Чувыкин Борис Викторович.
Ведущее предприятие – ФГУП «ГНПРКЦ "ЦСКБ–Прогресс"»,
г. Самара.
Защита диссертации состоится «____»_________» 2011 г., в «___» часов, на заседании диссертационного совета Д 212.186.02 в государственном образовательном учреждении высшего профессионального образования «Пензенский государственный университет» по адресу: 440026,
г. Пенза, ул. Красная, 40.
С диссертацией можно ознакомиться в библиотеке государственного образовательного учреждения высшего профессионального образования «Пензенский государственный университет». Автореферат размещен на сайте ВАК.
Автореферат разослан «___» _______ 2011 г.
Ученый секретарь
диссертационного совета
доктор технических наук,
профессор Светлов А. В.
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность темы. Современное развитие специальной техники, к которой относят ракетно-космическую технику, вооружение и военную технику, авиацию, двигателестроение, изделия для атомной энергетики и т.п., во многом зависит от технического уровня информационно-измерительных и управляющих систем (ИИУС), качество и технико-экономические показатели которых определяются использованной в них датчико-преобразующей аппаратурой (ДПА). В специальной технике ДПА эксплуатируется при воздействии большого количества дестабилизирующих факторов: ударов, вибраций, линейных ускорений, акустического шума, широкого диапазона воздействующих температур. При создании сложных комплексов в настоящее время широко используются электромагнитные датчики перемещений (ЭМДП). Они применяются во многих ИИУС специальной техники.
Практика использования ЭМДП специального назначения выдвигает перед разработчиками многообразные, зачастую противоречивые требования, которым они должны удовлетворять. Это точность, надежность, помехозащищенность, быстродействие, малые габаритные размеры, технологичность изготовления и пр. Жесткость требований к ЭМДП обусловлена необходимостью повышения их точности и одновременного уменьшения габаритных размеров, что связано в первую очередь с широким использованием датчиков на подвижных объектах, где уменьшение габаритов и массы оборудования позволяет увеличить общий коэффициент полезного действия объекта и объем формируемой информации. Это особенно важно при работе датчиков в ограниченных пространствах: во внутренних полостях агрегатов, двигателей, гидроцилиндров, под обшивками летательных аппаратов, в переносных устройствах, где ограничения в габаритных размерах играют решающую роль при выборе датчика. Кроме того, снижение габаритно-весовых показателей ведет к уменьшению энергопотребления и материалоемкости, однако при этом должны сохраняться метрологические характеристики датчиков.
В настоящее время разработано большое количество ЭМДП, которые отличаются по структуре построения и методу обработки сигналов с чувствительных элементов (ЧЭ).
Наибольшее распространение среди электромагнитных датчиков получили взаимоиндуктивные (трансформаторные) преобразователи перемещений, отличающиеся высокой помехоустойчивостью, наличием гальванической развязки и высокой надежностью в условиях воздействия де-
стабилизирующих факторов. Тем не менее они не свободны от ряда недостатков, таких как:
– влияние нестабильности питающего напряжения (тока);
– изменение параметров датчика от температуры окружающей
среды;
– зависимость диапазона измеряемых перемещений от габаритных размеров датчика.
Большой вклад в развитие теории, проектирования и промышленного освоения ЭМДП внесли приборостроительные фирмы как отечественные (МГТУ им. Н. Баумана; Самарский государственный аэрокосмический университет; Ульяновский авиационный институт; ОАО «НИИФИ»,
г. Пенза; НПО «Измерительная техника», г. Королев Московской обл.; Ульяновское конструкторское бюро приборостроения и др.), так и зарубежные (HEIDENHAIN; Siemence and Halske; Hottin Ger Baedwin Messteschnik GMBH, Германия; Shaevitz Electronic Corporation, США; Olivetti, Италия; Mitsubishi, Япония и др.). Современные методы и средства проектирования ЭМДП сформировались на базе большого количества исследовательских работ и изобретений известных ученых: Д. И. Агейкина,
А. А. Ахметжанова, Э. И. Гитиса, В. Г. Домрачева, М. Ф. Зарипова,
Н. Е. Конюхова, Л. Ф. Куликовского, К. Л. Куликовского, Е. А. Мокрова, П. В. Новицкого, Е. П. Осадчего, М. А. Ураксеева, М. П. Цапеко, В. Е. Шатерникова, В. М. Шляндина и др.
Разработаны образцы ЭМДП с высокими точностными показателями, временной стабильностью, быстродействием, приемлемыми массо-габаритными характеристиками и т.п. Тем не менее в настоящее время не существуют серийно выпускаемые ЭМДП, сохраняющие свои точностные характеристики в диапазоне температур от –196 до +300 °С, не разработаны унифицированные конструкции, на базе которых возможно построение ряда датчиков, способных удовлетворять потребности отраслей промышленности в преобразователях специального назначения для измерения перемещений в жестких условиях эксплуатации. Отсутствуют теоретические основы проектирования унифицированных ЭМДП с использованием растровых сопряжений; разработанные математические модели, описывающие воздействие нестационарных тепловых процессов на конструкции ЭМДП, когда внешняя и измеряемая среды имеют существенно неоднородные характеристики; обоснованные правила выбора параметров конструктивных элементов, позволяющие проектировать ЭМДП с заданными характеристиками; инженерные методики расчета магнитной проводимости в рабочих зазорах растровых электромагнитных датчиках угловых перемещений, имеющих температурную погрешность не более 0,001 %/°С;
В результате возникла необходимость разработки теории и конструктивных решений по созданию унифицированных рядов, а именно совокупности датчиков перемещений одинакового функционального назначения, включающей базовую конструкцию и ее модификации с сохранением числового ряда главного параметра (диапазон измерения), для ИИУС специального назначения с малой температурной погрешностью, высокой точностью измерения и малыми габаритными размерами, не зависящими от диапазона измерения.
Решение поставленных выше задач по созданию унифицированных ЭМДП для ИИУС специального назначения обусловливает актуальность представленной работы.
Целью диссертационной работы является совершенствование существующих, разработка новых ЭМДП ИИУС; развитие теории и разработка методик инженерного проектирования электромагнитных датчиков, работающих в жестких условиях эксплуатации с заданными метрологическими и эксплуатационными характеристиками; создание и внедрение унифицированных рядов датчиков линейных и угловых перемещений.
Для достижения поставленной цели в диссертационной работе решались следующие задачи:
1) разработка физической и математической моделей взаимоиндуктивных ЧЭ для растровых ЭМДП с цилиндрическим и торцевым сопряжением растров;
2) анализ обобщенной схемы замещения и создание методики расчета проводимостей рабочих зазоров в ЭМДП с комбинационным сопряжением зубцовых растров;
3) исследование влияния нестационарных тепловых процессов при различных условиях и режимах работы ЭМДП, получение качественных и количественных оценок параметров этих процессов;
4) проведение анализа погрешностей ЭМДП, определение зависимости между метрологическими и конструктивными параметрами датчиков;
5) исследование метрологических характеристик и источников погрешностей растровых ЭМДП при использовании амплитудно-логического метода обработки сигналов;
6) проведение физического моделирования растровых сопряжений ЭМДП для определения оптимальных соотношений элементов конструкций и влияния инструментальных погрешностей на метрологические характеристики датчиков;
7) разработка базовых конструкций и создание на их основе унифицированных рядов ЭМДП, работоспособных в жестких условиях эксплуатации;
8) разработка градуировочно-испытательного оборудования для подтверждения метрологических и эксплуатационных характеристик разработанных датчиков с учетом особенностей технологии изготовления и испытаний ЭМДП.
Методы исследований. При решении поставленных задач использованы методы интегрального и дифференциального исчисления, аналитической геометрии, математического моделирования, теории электрических цепей, электромагнитного поля. Теоретические и экспериментальные исследования проводились с использованием пакета программ MathCAD и алгоритмического языка Turbo Pascal. При проектировании конструкций датчиков применялись системы автоматизированного проектирования КОМПАС и AutoCAD.
Достоверность научных положений, выводов и рекомендаций диссертационной работы подтверждена результатами экспериментальных исследований опытных образцов ЭМДП, разработанных при выполнении НИОКР по государственным программам и прямым договорам, результатами стендовых и натурных испытаний в составе ИИУС изделий авиационной и ракетно-космической техники.
Научная новизна диссертационной работы заключается в следующем:
1. Созданы теоретические основы проектирования растровых взаимоиндуктивных датчиков линейных и угловых перемещений.
2. Предложена и теоретически обоснована модель теплового поля ЭМДП при его эксплуатации в условиях сложных тепловых воздействий, позволяющая на ранних стадиях разработки проводить анализ, рассчитывать температурные поля и выбирать основные конструктивные параметры.
3. Разработаны обобщенная схема замещения и математическая модель чувствительных элементов растровых ЭМДП. На их основе сформированы теоретические основы методик расчета магнитной проводимости в зубцовых зазорах с учетом сопротивлений утечки, позволяющие рассчитывать основные конструктивные параметры датчиков.
4. Разработаны научные основы проектирования высокотемпературных бесконтактных ЭМДП с использованием металлопленочных и металлокерамических обмоток.
5. Проведен метрологический анализ инструментальных погрешностей растровых взаимоиндуктивных датчиков угловых и линейных перемещений, определены пути их уменьшения.
Практическая ценность работы определяется внедрением основных положений, выводов и рекомендаций, полученных при исследовании и разработке ЭМДП для ИИУС специального назначения. Практическую ценность работы представляют:
1. Программное обеспечение в комплексе «DLP», позволяющее проводить анализ, рассчитывать и визуализировать неоднородные, нестационарные температурные поля ряда ЭМДП.
2. Результаты математического моделирования тепловых процессов в бесконтактном ЭМДП при различных условиях и режимах его работы, позволившие получить качественные и количественные оценки параметров этих процессов для разработки тепловых моделей программируемых контроллеров для космического аппарата «Фотон-М» №2.
3. Инженерная методика расчета конструктивных параметров растровых ЭМДП.
4. Разработанные базовые конструкции ряда датчиков:
– линейных и угловых перемещений ПЛИ 086, ПУИ 065, ПУИ 063 для системы измерения стендового оборудования по теме «КБС» и системы измерений при испытаниях динамического макета разгонного блока 465ГК0000АХ61-0 по теме «Наземный старт»;
– линейных перемещений С 085 для системы контроля параметров изделия «Булава»;
– угловых перемещений ПУИ 062 для системы измерения параметров внутритрубного профилемера;
– угловых перемещений ПУИ 064 для системы контроля параметров шасси объекта Т-50.
5. Результаты проверочных испытаний разработанных в ОАО «НИИФИ» (г. Пенза) унифицированных конструкций ЭМДП (С 085,
ПУИ 062, ПУИ 064, ПУИ 065, ПЛИ 086), подтвердившие технические характеристики датчиков.
На защиту выносятся:
1. Математическая модель на основе обобщенной магнитной схемы замещения ЧЭ взаимоиндуктивных датчиков перемещений с растровым сопряжением, позволившая сформировать основные расчетные выражения для выходных сигналов с учетом сопротивлений утечки с торцевых поверхностей статора и ротора, сопротивлений магнитопровода и сопротивлений воздушного зазора.
2. Модель теплового поля бесконтактного ЭМДП при его эксплуатации в условиях воздействия нестационарных тепловых полей, позволяющая определять температуру в любой точке датчика во время воздействия теплового потока и размеры теплозащитного экрана.
3. Аналитические выражения, определяющие зависимости между конструктивными параметрами и инструментальными погрешностями растровых взаимоиндуктивных датчиков перемещений и зависимости между точностными и динамическими показателями, позволяющие проводить расчет конструкций датчиков исходя из заданных метрологических характеристик.
4. Варианты разработанных автором унифицированных ЧЭ и оригинальных конструкций различных ЭМДП для экстремальных условий эксплуатации.
Реализация и внедрение.
Разработанные в диссертационной работе теоретические основы инженерных методов расчета внедрены в ОАО «НИИФИ» (г. Пенза) при создании ряда датчиков линейных и угловых перемещений ПУИ 062, С 085, ПУИ 065, ПЛИ 086, ПУИ 064, которые прошли приемочные испытания и поставляются потребителям.
Методики оценки погрешностей и предложенные автором конструктивные решения использованы в ОАО «НИИФИ» при проведении ОКР по теме «Возрождение», включенной в Федеральную космическую программу развития датчиковой аппаратуры на период 2006–2015 гг. утвержденной Постановлением Правительства от 22 октября 2005 г. № 635, НИР «Обнова», «Разработка макетных образцов перспективных датчиков, преобразователей физических величин и компонентов датчиков параметров физических величин с подтверждением их основных технических характеристик», выполняемой в рамках Комплексной целевой программы «Датчик ВВТ», по госконтракту № 5341/215-05 от 12.05.2005, ОКР «Разработка системы контроля параметров шасси для объекта Т 50» по прямому договору с ОАО «ОКБ Сухого», ОКР «Булава», «Разработка системы измерения линейных перемещений» по договору с ГРЦ «КБ им. академика
В. П. Макеева».
Новые технические решения (патент РФ № 2208762) использованы в датчике линейных перемещений системы С 085. Датчик серийно поставлялся в течение 2002–2003 гг. в КБ им. В. П. Макеева (г. Миасс).
Разработанный автором датчик ПУИ 062 внедрен в систему измерений внутритрубного профилемера и серийно поставлялся предприятию ОАО ЦТД «Диаскан» в течение 2003 г. Датчик угловых перемещений
ПУИ 064 и переключатель конечный ПК 3 внедрены в систему контроля параметров шасси объекта Т 50 и поставляются предприятию ОАО «ОКБ Сухого».
Результаты диссертационной работы внедрены в учебный процесс на кафедре «Информационно-измерительная техника» ГОУ ВПО «Пензенский государственный университет».
Запатентованные новые технические решения (патент РФ № 63143) реализованы в преобразователе для растровых датчиков линейных и угловых перемещений Б 014, разработанном по теме ОКР «Возрождение – ПГУ», договор № 5-06/11/06.
Внедрение результатов работ подтверждено актами ОАО «НИИФИ» (г. Пенза); ГРЦ «КБ им. академика В. П. Макеева» (г. Миасс Челябинской обл.); ОАО ЦТД «Диаскан» (г. Луховицы Московской обл.); РКК «Энергия» (г. Королев Московской обл.); НПП «Антарес» (г. Саратов); ЗАО Волжское конструкторское бюро РКК «Энергия» (г. Самара); ИПТМУ РАН (г. Саратов), ОАО «ОКБ Сухого» (г. Москва); ГОУ ВПО «Пензенский государственный университет» (г. Пенза).
Апробация работы. Основные положения диссертационной работы докладывались и обсуждались на международных конференциях и семинарах: международной научно-технической конференции (МНТК) «Методы и средства измерения в системах контроля и управления» (г. Пенза, 2001, 2002 гг.); на российско-германской конференции «Датчики и системы» (г. Санкт-Петербург, 2002 г.); на IV международной молодежной научно-практической конференции «Человек и космос» (г. Днепропетровск, Украина, 2002 г.); на международной НТК «Измерения» (ПГУ, г. Пенза, 2002, 2003, 2006, 2008 гг.); на международном форуме «Топливно-энергетический комплекс России: региональные аспекты» (Санкт-Петербург, 2002 г.); на 8-й всероссийской НТК «Состояние и проблемы измерений» (г. Москва, 2002 г.); на научно-практической конференции «Нефтегазовая отрасль: тенденции и перспективы развития» (г. Саратов, 2002 г.); на научно-техническом семинаре «МПС–2003» (г. Таганрог,
2003 г.); на международной НТК «Проблемы и перспективы развития двигателестроения» (г. Самара, 2003 г.); на НТК «Датчики и детекторы для авиационной техники» (г. Пенза, 2003 г.); на международной НТК «Датчики и системы» (г. Пенза, 2005 г.); на IV и V международных конференциях «Авиация и космонавтика» (г. Москва, МАИ, 2005, 2006 гг.); на второй международной НТК «Авиадвигатели XXI века» (ФГУП «ЦИАМ
им. П. И. Баранова», г. Москва, 2005 г.); на НТК «Датчики и системы»
(г. Москва, Дом оптики, 2006 г.); на международном симпозиуме «Надежность и качество» (г. Пенза, 2007 г.); на отраслевой НТК «Информационно-управляющие и измерительные системы» (НПО «Измерительная техника», г. Королев Московской обл., 2007 г.); на международной НТК «Проблемы автоматизации и управления в технических системах» (ПГУ, г. Пенза, 2008, 2009 гг.); на межотраслевой конференции «Технологии производства перспективных МЭМС-приборов» (ЗАТО, г. Заречный Пензенской обл., ФГУП ФНПЦ «ПО Старт», 2009 г.); на НТК «Актуальные проблемы ракетно-космического приборостроения и информационных технологий» (РНИИКП, г. Москва, 2007, 2009, 2010 гг.); на международной НТК «Перспективные информационные технологии для авиации и космоса» (СГАУ, г. Самара, 2010 г.).
Публикации. По теме диссертации опубликовано лично и в соавторстве 65 печатных работ, в том числе 1 монография, 13 статей в журналах по списку ВАК, 2 патента РФ на изобретение, 1 патент РФ на полезную модель и 3 учебных пособия.
Структура и объем диссертации. Диссертация состоит из введения, шести глав, основных результатов и выводов по работе, библиографического списка из 164 наименований и приложений. Общий объем работы – 303 страницы. Библиографический список и приложения выполнены на
36 страницах.
Диссертационная работа написана автором по материалам НИОКР, выполненных в ОАО «Научно-исследовательский институт физических измерений» (г. Пенза) в рамках работ, проводимых по госконтрактам,
а также по прямым договорам с предприятиями авиационной и ракетно-космической отраслей и договорным работам, выполненным на кафедре «Информационно-измерительная техника» ГОУ ВПО «Пензенский государственный университет».
Автор выражает благодарность бывшему генеральному директору-главному конструктору ОАО «Научно-исследовательский институт физических измерений», доктору технических наук, профессору Е. А. Мокрову за ценные замечания, полученные при постановке и решении задач в процессе разработки ЭМДП специального назначения.
КРАТКОЕ СОДЕРЖАНИЕ РАБОТЫ
Во введении кратко изложены основные направления развития датчиковой аппаратуры. Обоснована актуальность темы исследования, определено состояние проблемы, сформулированы научная новизна, практическая ценность, цели и задачи исследования, приводятся основные положения, выносимые на защиту.
В первой главе представлен анализ чувствительных элементов, используемых для построения электромагнитных датчиков перемещений специального назначения. Проанализированы электромашинные датчики (сельсины, редуктосины, вращающиеся трансформаторы), взаимоиндуктивные бесконтактные ЧЭ, чувствительные элементы соленоидного типа, растровые взаимоиндуктивные и вихретоковые ЧЭ. Проведенный анализ показал, что наиболее перспективными для решения задач измерения перемещений с высокой точностью в широком диапазоне температур и высокой надежностью в жестких условиях эксплуатации являются растровые взаимоиндуктивные датчики. Сформулированы основные требования, предъявляемые к датчикам перемещений специального назначения. Предложена систематизация электромагнитных преобразователей перемещений для систем специального назначения по методам кодирования и квантования, которая не только охватывает все реализованные виды электромагнитных цифровых преобразователей перемещений, но и позволяет прогнозировать появление новых, пока еще не существующих типов преобразователей, в которых операции квантования и кодирования выполняются новой комбинацией звеньев и методов обработки.
Разработана физическая модель взаимоиндуктивных чувствительных элементов с цилиндрическим растром, которая показала, что для формирования расчетной математической модели необходима разработка обобщенной схемы замещения магнитной цепи растровых взаимоиндуктивных датчиков перемещений.
Во второй главе исследованы вопросы построения математической модели растровых датчиков линейных и угловых перемещений с цилиндрическим сопряжением растров, отличающихся от известных тем, что статор с обмотками возбуждения и считывания расположен внутри вращающегося ротора. С целью создания математической модели растровых трансформаторных датчиков рассмотрены их унифицированные конструктивные исполнения.
На рисунке 1 изображена разработанная автором базовая конструктивная схема датчика угловых перемещений, состоящего из неподвижного статора 2, вращающегося ротора 1, ось 5 которого связана с объектом контроля, обмоток возбуждения и считывания 3, расположенных в кольцевых проточках статора, соединенных последовательно встречно. Ротор установлен на подшипниках 4. Статор и ротор выполнены из пермаллоя марки 79 НМ.
На рисунке 2 приведена конструктивная схема растрового универсального взаимоиндуктивного преобразователя линейных перемещений,
в основе которого, как и у датчика угловых перемещений, лежит вращающийся ротор 1 и расположенный внутри него статор 2. В кольцевых пазах статора размещены питающая и измерительные обмотки 3. Узел ротора
установлен в подшипниках качения 4 и имеет закрепленный в нем с помощью кольца шарик 5, который входит в профилированную винтовую
канавку на поверхности штока 6, жестко связанного с объектом контроля. Шток выполняет роль механической связи между датчиком и контролируемыми блоками механических систем, свободно перемещается в осевом направлении, совпадающем с направлением контролируемого перемещения.

Рисунок 1 – Базовая конструктивная схема датчика угловых перемещений

Рисунок 2 – Базовая конструктивная схема растрового универсального
преобразователя перемещений
Линейное перемещение штока с помощью шарика, взаимодействующего с винтовой канавкой штока, преобразуется во вращательное движение узла ротора. Перемещение зубьев ротора относительно зубьев статора приводит к появлению модуляции в четырех выходных обмотках.
Статор 1 и ротор 2 служат прямым и обратным магнитопроводом и представляют распределенную магнитную систему (РМС). В этом случае уравнения для РМС выводятся так же, как для электрической линии, поскольку законы магнитных цепей аналогичны законам Кирхгофа. Анализ двух конструктивных схем позволил составить их обобщенную схему замещения растрового ЧЭ с наружным ротором, приведенную на рисунке 3, которая дает возможность определить основные выражения для выходных сигналов с учетом магнитных сопротивлений утечки ![]() с торцевых поверхностей статора и ротора, сопротивлений магнитопроводов
с торцевых поверхностей статора и ротора, сопротивлений магнитопроводов ![]() , проводимостей воздушного зазора
, проводимостей воздушного зазора ![]() и участков обмоток с магнитодвижущей силой (МДС)
и участков обмоток с магнитодвижущей силой (МДС) ![]() . На основе обобщенной магнитной схемы замещения сформирована электрическая схема замещения магнитной цепи растрового ЭМДП, представленная на рисунке 4, которая определяется выражением (1), составленным по второму закону Кирхгофа. В выражении (1) ток в k-й ветви соответствует магнитному потоку в этой ветви
. На основе обобщенной магнитной схемы замещения сформирована электрическая схема замещения магнитной цепи растрового ЭМДП, представленная на рисунке 4, которая определяется выражением (1), составленным по второму закону Кирхгофа. В выражении (1) ток в k-й ветви соответствует магнитному потоку в этой ветви ![]() , а ЭДС пропорциональна МДС:
, а ЭДС пропорциональна МДС:
 (1)
(1)
Проведен расчет магнитной проводимости в рабочих зазорах растровых трансформаторных датчиков перемещений с цилиндрическим сопряжением зубцовых растров. На рисунке 5 показаны проекции зубцовых зон ротора и статора базовых конструкций датчиков угловых и линейных перемещений (см. рисунки 1 и 2) и контур обмотки, который может «перемещаться» вдоль оси ![]() при повороте ротора. Зоны зубцовых поверхностей статора и ротора заштрихованы. Из рисунка видно, что участки сопряжения можно разделить на четыре типа, обладающие различной проводимостью
при повороте ротора. Зоны зубцовых поверхностей статора и ротора заштрихованы. Из рисунка видно, что участки сопряжения можно разделить на четыре типа, обладающие различной проводимостью![]() , тогда суммарную проводимость участка, ограниченного контуром обмотки шириной r, можно выразить следующим образом:
, тогда суммарную проводимость участка, ограниченного контуром обмотки шириной r, можно выразить следующим образом:
 , (2)
, (2)
где ![]() – магнитная проводимость участка «выступ над выступом»;
– магнитная проводимость участка «выступ над выступом»; ![]() – магнитная проводимость участка «выступ ротора над впадиной статора»;
– магнитная проводимость участка «выступ ротора над впадиной статора»; ![]() – магнитная проводимость участка «впадина над впадиной»;
– магнитная проводимость участка «впадина над впадиной»; ![]() – магнитная проводимость участка «выступ статора над впадиной ротора»; m – число участков цепи «зуб – впадина».
– магнитная проводимость участка «выступ статора над впадиной ротора»; m – число участков цепи «зуб – впадина».


Рисунок 3 – Обобщенная магнитная схема замещения растрового ЧЭ

Рисунок 4 – Схема замещения растрового ЧЭ ЭМДП
С учетом геометрических параметров сопряжения, показанных на рисунке 5, получено выражение для расчета магнитной проводимости воздушного зазора:
 , (3)
, (3)
где ![]() – площади участков, охваченных обмоткой считывания с проводимостями
– площади участков, охваченных обмоткой считывания с проводимостями ![]() соответственно; h – высота контура считывания;
соответственно; h – высота контура считывания; ![]() – экспериментальный коэффициент, учитывающий влияние боковых магнитных потоков;
– экспериментальный коэффициент, учитывающий влияние боковых магнитных потоков; ![]() – шаг нарезки зубцового сопряжения (здесь
– шаг нарезки зубцового сопряжения (здесь![]() – угол наклона зубцов статора); a, b, c, d – глубина воздушных зазоров участков.
– угол наклона зубцов статора); a, b, c, d – глубина воздушных зазоров участков.

Рисунок 5 – Проекции зубцовых зон ротора и статора
На основе разработанной математической модели составлена методика расчета конструктивных параметров (шаг растра, количество зубьев статора и ротора, ширина и высота зуба, угол наклона и др.) взаимоиндуктивных растровых преобразователей угловых и линейных перемещений с цилиндрическим и торцевым сопряжением растров и приведен пример расчета растрового датчика перемещений.
Разработаны конструктивные и технологические способы совершенствования растровых датчиков перемещений, позволившие улучшить взаимозаменяемость датчиков, а также исключить индивидуальную подстройку сигнала с каждого канала растрового датчика по амплитуде. Проведен анализ возможности расширения температурного диапазона растровых трансформаторных датчиков перемещений. В результате проведенного анализа материалов и комплектующих растровых трансформаторных датчиков перемещений выявлено, что расширение их температурного диапазона до 250 °С может быть достигнуто за счет замены некоторых материалов и комплектующих без принципиального изменения конструктивных решений.
Сформирована методика расчета бесконтактных ЭМДП с разомкнутым магнитопроводом, обобщенная схема которых представлена на рисунке 6.
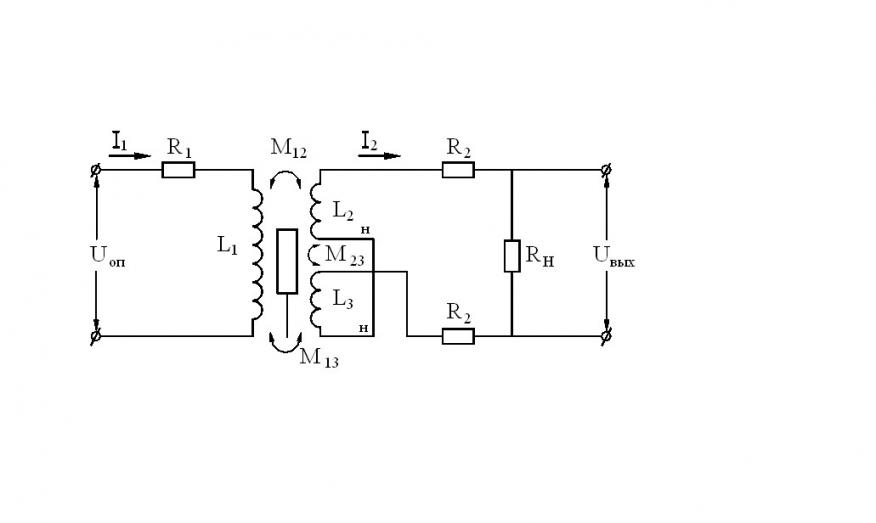
Рисунок 6 – Схема бесконтактного ЭМДП
На схеме замещения приняты следующие обозначения: R1 – активное сопротивление обмотки питания; R2 – активное сопротивление секции измерительной обмотки; Uоп – напряжение, поступающее на обмотку питания; L1 – индуктивность обмотки питания; М12 и М13 – взаимные индуктивности соответственно верхней и нижней секций измерительной обмотки и обмотки питания; М23 – взаимные индуктивности секций измерительной обмотки; L2 и L3 – индуктивности соответственно верхней и нижней секций измерительной обмотки; Rн – сопротивление нагрузки; Uвых – выходное напряжение.
ЭДС верхней и нижней секций вторичной обмотки ЭМДП Е1 и Е2 выражается в долях выходной эдс, приходящейся на единицу перемещения сердечника:
 ; (4)
; (4)
 , (5)
, (5)
где ![]() – ЭДС на зажимах секций вторичной обмотки при расположении якоря в электрической нейтрали датчика;
– ЭДС на зажимах секций вторичной обмотки при расположении якоря в электрической нейтрали датчика; ![]() – перемещение сердечника относительно электрической нейтрали датчика;
– перемещение сердечника относительно электрической нейтрали датчика; ![]() – изменение вторичной ЭДС, приходящееся на единицу перемещения сердечника;
– изменение вторичной ЭДС, приходящееся на единицу перемещения сердечника;
 , (6)
, (6)
где ![]() и
и ![]() – ЭДС на зажимах секций первичной и вторичной обмотки соответственно.
– ЭДС на зажимах секций первичной и вторичной обмотки соответственно.
Значение выходной ЭДС датчика при встречном включении вторичной обмотки определяется выражением
![]() . (7)
. (7)
В третьей главе на базе общих подходов, методов и алгоритмов проведен расчет температурных полей ЭМДП, построенный на применении численного метода и метода «элементарных» балансов с использованием основных законов теплообмена: закона сохранения энергии, закона Фурье, закона Ньютона, закона Стефана – Больцмана. Разработана модель тепловых процессов, протекающих в датчике линейных перемещений (рисунок 7), которая реализована в специализированном программном комплексе «DLP».
Использование основных законов теплообмена приводит к непосредственному получению расчетных алгоритмов, минуя стадию составления дифференциальных уравнений.
Сущность предложенного метода заключается в следующем: датчик разбивается на конечные твердотельные элементарные объемы, имеющие форму кольцевых или сплошных цилиндров. Количество элементарных объемов N (в каждом из которых определяется температурное поле) выбрано равным 50 исходя из конструктивных соображений (см. рисунок 7).
Количество тепла ![]() , вошедшего в i-элементарный объем за время
, вошедшего в i-элементарный объем за время ![]() , равно
, равно
 , (8)
, (8)
где ![]() – температура i-го твердотельного элемента, i = 1, 2, …N;
– температура i-го твердотельного элемента, i = 1, 2, …N; ![]() – температура объемов-каналов, заполненных средами-теплоносителями;
– температура объемов-каналов, заполненных средами-теплоносителями; ![]() – температура окружающей среды;
– температура окружающей среды; ![]() – количество объемов-каналов, заполненных средами-теплоносителями; qij – термопроводимости между твердотельными элементами i, j; qic – термопроводимости между i-м элементом и окружающей средой;
– количество объемов-каналов, заполненных средами-теплоносителями; qij – термопроводимости между твердотельными элементами i, j; qic – термопроводимости между i-м элементом и окружающей средой; ![]() – термопроводимости между i-м элементом и
– термопроводимости между i-м элементом и ![]() -м объемом, заполненным средой-теплоносителем;
-м объемом, заполненным средой-теплоносителем; ![]() – мощность источника тепловой энергии (обмотки возбуждения).
– мощность источника тепловой энергии (обмотки возбуждения).
Сумма количества тепла, вошедшего в рассмотренный «элементарный» объем, равна увеличению его теплосодержания:
![]()
где ci – удельная теплоемкость i-го элементарного объема; ![]() – температура i-го объема в последующий момент времени;
– температура i-го объема в последующий момент времени;

 (9)
(9)
здесь qij – термопроводимость между твердотельными элементами i, j;
qic – термопроводимость между i-м элементом и окружающей средой.

Рисунок 7 – Тепловая модель бесконтактного ЭМДП
и разбивка его на элементарные объемы
Разработанная модель позволяет рассчитывать, проводить анализ и визуализировать неоднородные, нестационарные температурные поля бесконтактных ЭМДП, функционирующих в условиях сложных тепловых воздействий.
Адекватность модели была подтверждена при разработке взаимоиндуктивного датчика линейных перемещений системы измерения С 085. Математическое моделирование и компьютерные эксперименты позволили определить в заданный момент времени температуру в любой точке датчика и рассчитать эффективность теплозащиты в зависимости от мощности и характера теплового потока (рисунок 8), размеров и материала защитных элементов.
Результаты экспериментов и натурные испытания в составе системы подтвердили достоверность результатов моделирования.
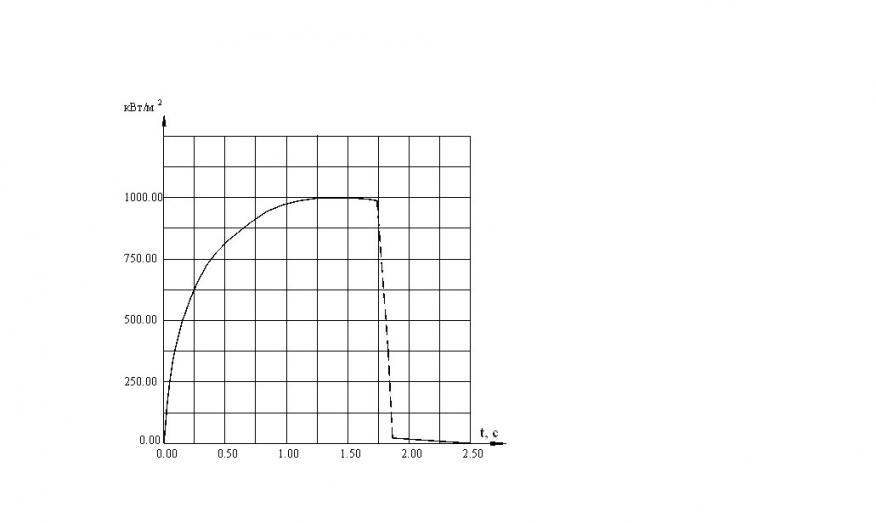
Рисунок 8 – Зависимость мощности осредненного теплового потока от времени
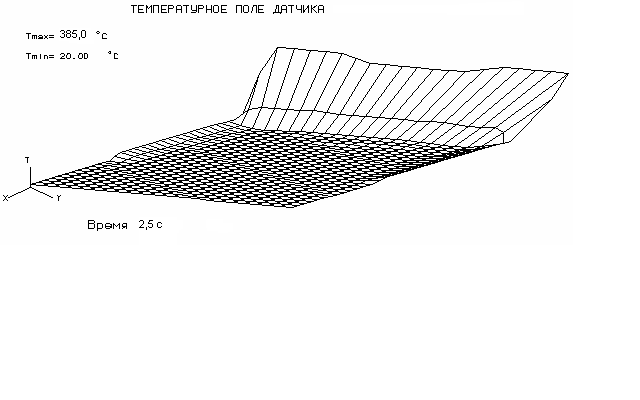
Рисунок 9 – Топограмма температурного поля датчика
Представленная на рисунке 9 топограмма температурного поля бесконтактного ЭМДП системы С 085 позволяет наглядно определить распределение температуры внутри датчика.
В четвертой главе исследованы основные и дополнительные погрешности датчиков перемещений специального назначения. Исследовано влияние инструментальных погрешностей растровых ЭМДП, для чего проведена систематизация инструментальных погрешностей растровых ЭМДП, представленная на рисунке 10, определены основные источники инструментальных погрешностей (рисунок 11) и предложены способы компенсации погрешности от конусности, эллипсности, биения статора и ротора. Также выявлены погрешности, вызванные допусками на элементы зубцового сопряжения (угол наклона, длину и ширину зубца и впадины, шаг нарезки зубцов, количество витков обмоток).

Рисунок 10 – Систематизация инструментальных погрешностей
растровых ЭМДП
Изменение магнитной проводимости Gэс, вызванной наличием эксцентриситета с:

 , (10)
, (10)
где![]() ;
; ![]() – количество обмоток, расположенных на статоре.
– количество обмоток, расположенных на статоре.
Выражение для расчета изменения проводимости при биениях ротора, таким образом, аналогично выражению (10), если заменить ![]() на
на ![]() и
и ![]() на
на ![]() .
.
Изменение магнитной проводимости Gэ, вызванной эллипсностью:
 . (11)
. (11)
Изменение магнитной проводимости от конусности ротора имеет вид
 . (12)
. (12)
Выявлены основные составляющие погрешности при амплитудно-логическом методе (АЛМ) обработки сигналов с растровых датчиков. Метод основан на сравнении по амплитуде сигналов с четырех измерительных обмоток датчика u1– u4 (рисунок 12). «Опознание» участков Д1,
Д2,…, Д8 внутри периода Т, соответствующего шагу зубцового сопряжения, производится путем сравнения выходных сигналов. Например, на участке Д3
u1 > u2 > u4 > u3. (13)
Далее происходит последовательный счет периодов Т.
Абсолютная погрешность из-за ошибок сравнения ![]() равна
равна
 , (14)
, (14)
где ![]() – погрешность сравнения; В – максимальное изменение амплитуды выходного напряжения на выходе датчика;
– погрешность сравнения; В – максимальное изменение амплитуды выходного напряжения на выходе датчика; ![]() – коэффициент электрической редукции.
– коэффициент электрической редукции.
Для нормальной работы преобразователя при идеальном компараторе суммарная погрешность детектора ![]() должна быть меньше или равна 1/4 цены единицы младшего разряда.
должна быть меньше или равна 1/4 цены единицы младшего разряда.
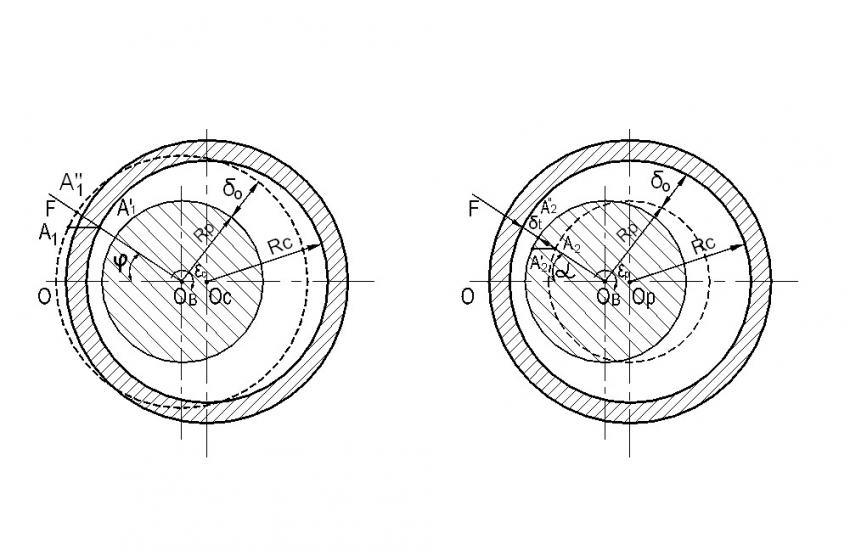

а – эксцентриситет; б – биение; в – эллипсность; г – конусность
Рисунок 11 – Источники погрешностей элементов ЭМДП
с цилиндрическим сопряжением растров


а – изменение сигналов во времени; б – изменение огибающих сигналов
в зависимости от перемещения x для датчика с четырьмя обмотками считывания
Рисунок 12 – Выходные сигналы с растрового датчика
В главе проведен расчет быстродействия и определена максимально допустимая скорость угловых перемещений ротора датчика ![]() при АЛМ обработки в зависимости от числа зубьев ротора, частоты напряжения питания и количества измерительных обмоток:
при АЛМ обработки в зависимости от числа зубьев ротора, частоты напряжения питания и количества измерительных обмоток:
 , (15)
, (15)
где ![]() у – число логически распознаваемых участков при повороте ротора на один зуб; Z – число зубьев ротора; fп – частота питающего напряжения.
у – число логически распознаваемых участков при повороте ротора на один зуб; Z – число зубьев ротора; fп – частота питающего напряжения.
Получено выражение для выходного сигнала с растровых ЭМДП:
 , (16)
, (16)
где ![]() и
и ![]() – число витков первичной и вторичной обмоток; Кв – скорость вращения вала растрового ЭМДП;
– число витков первичной и вторичной обмоток; Кв – скорость вращения вала растрового ЭМДП; ![]() – угол поворота ротора;
– угол поворота ротора; ![]() – составляющие магнитного сопротивления рабочего зазора.
– составляющие магнитного сопротивления рабочего зазора.
Из выражения (16) следует, что выходной сигнал состоит из трех составляющих:
![]() , (17)
, (17)
где ![]() – постоянная составляющая для
– постоянная составляющая для ![]()
![]() – трансформаторная ЭДС, являющаяся информативным сигналом;
– трансформаторная ЭДС, являющаяся информативным сигналом; ![]() – генераторная ЭДС, являющаяся основным источником динамической погрешности.
– генераторная ЭДС, являющаяся основным источником динамической погрешности.
Динамическая погрешность преобразователя возрастает с увеличением скорости вращения вала. Увеличение разрешающей способности, связанное с увеличением числа зубьев Z и количества обмоток считывания, приводит к увеличению динамической погрешности (рисунок 13).
Все рассматриваемые растровые датчики имеют частоту питающего напряжения ![]() , которая определялась экспериментальным путем исходя из условия получения максимальной чувствительности датчика, поэтому целесообразно определить предельно допустимые значения скоростей контролируемых перемещений. Учитывая, что во всех преобразователях линейное или угловое перемещение в конечном счете преобразуется в промодулированное по синусоидальному закону изменение сигнала от угла поворота ротора, можно записать
, которая определялась экспериментальным путем исходя из условия получения максимальной чувствительности датчика, поэтому целесообразно определить предельно допустимые значения скоростей контролируемых перемещений. Учитывая, что во всех преобразователях линейное или угловое перемещение в конечном счете преобразуется в промодулированное по синусоидальному закону изменение сигнала от угла поворота ротора, можно записать
 , (18)
, (18)
где А – амплитуда сигнала; ![]() , здесь
, здесь ![]() – частота огибающего выходного сигнала.
– частота огибающего выходного сигнала.
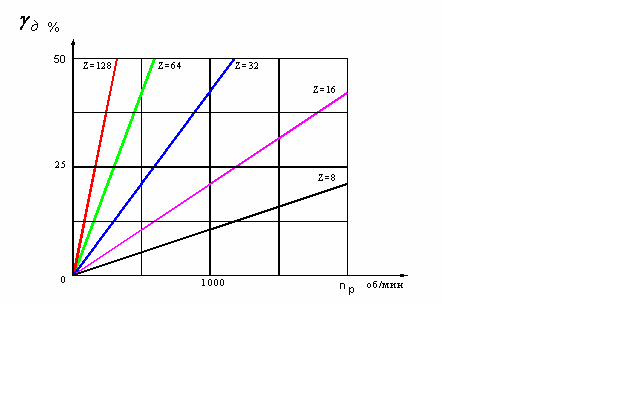
Рисунок 13 – Зависимость динамической погрешности от скорости
вращения входного вала датчика; ![]() – динамическая погрешность,
– динамическая погрешность,
выраженная в % от цены наименьшего разряда выходного кода
В свою очередь,
![]() , (19)
, (19)
где ![]() – число оборотов ротора.
– число оборотов ротора.
Кроме рассмотренных ограничений скорости контролируемых перемещений, связанных с погрешностью квантования, существуют ограничения, налагаемые методом обработки выходного сигнала. Выявлены две основные составляющие погрешности при использовании АЛМ обработки сигналов с растровых датчиков перемещений: погрешность амплитудных детекторов и погрешность преобразования запоминающего устройства.
В пятой главе сформулирован основной подход к созданию унифицированных перспективных конструкций ЭМДП для вновь проектируемых ИИУС с применением метода опережающего проектирования. Определены основные задачи унификации и стандартизации при разработке датчиков перемещений специального назначения; приведены основные понятия и определения:
– базовая конструкция датчика – конструкция датчика, его сборочных единиц и деталей, отраженная в чертежах, а также в требованиях, определяющих конструктивное решение, обязательное для применения при конструировании ряда датчиков4
– конструктивно-унифицированный ряд – совокупность датчиков одинакового функционального назначения, включающая базовую конструкцию, ее модификации и сохраняющая числовое значение главного параметра.
Проанализированы пути создания унифицированных конструкций датчиков ИИУС специального назначения и показано, что наиболее перспективным для создания датчиков по своим технико-экономическим показателям, отвечающим требованиям, предъявляемым к вновь разрабатываемым изделиям специальных отраслей промышленности, является метод опережающего проектирования, заключающийся в разработке унифицированных ЧЭ, отвечающих прогнозируемым техническим требованиям, с использованием новейших материалов и элементной базы. На основе предложенных инженерных методик расчета и базовых конструкций ЧЭ для датчиков угловых и линейных перемещений (см. рисунки 1 и 2) разработаны при участии автора в ОАО «НИИФИ» (г. Пенза) унифицированные ряды ЭМДП, основные технические характеристики которых приведены в таблице 1.
Предложена функциональная схема унифицированного вторичного преобразователя Б-014 (рисунок 14), предназначенного для работы со всеми разработанными растровыми ЭМДП, выполненная на базе микроконтроллера PIC18F2523 фирмы Microchip.

ГСC – генератор синусоидального сигнала; ПНТ – преобразователь
«напряжение – ток»; УС1–УС6 – узлы сравнения;
ЦУС1 и ЦУС2 – цифровые управляемые сопротивления
Рисунок 14 – Функциональная схема преобразователя Б 014
На датчики разработана конструкторская документация, изготовлены экспериментальные образцы и проведены испытания по подтверждению основных технических характеристик. Преобразователи ПУИ 062, ПУИ 063, ПУИ 064, ПУИ 065, ПУИ 065-01, МДП, ПЛИ 086, ДП-2, система С 085 внедрены на изделиях заказчика.
Таблица 1 – Основные технические характеристики разработанных
датчиков перемещений специального назначения
| Наименование прибора | Диапазон рабочих температур, °С | Диапазон измеряемых перемещений | Основная приведенная погрешность, % | Положения диссертации, реализованные в разработанных ЭМДП |
| 1. Штоковый универсальный датчик ПЛИ 086 | –60...+200 | 0–30, 0–45, 0–60, 0–90, 0–125, 0–180, 0–250, 0–350, 0–500, 0–700 мм | 0,10,2 | – разработанная математическая модель растрового ЭМДП; – инженерная методика расчета растровых ЧЭ; – результаты физического моделирования и экспериментальных исследований растровых сопряжений ЭМДП; – базовые конструкции ЧЭ растровых ЭМДП; – результаты метрологического анализа погрешностей; – патент на полезную модель РФ № 63143, внедренный в преобразователе для растровых датчиков линейных и угловых перемещений Б 014 |
| 2. Датчик угловых перемещений с механической редукцией ПУИ 065-01 | –65…+200 | 0–360° | 0,02 | |
| 3. Растровый датчик угловых перемещений ПУИ 065 | –65…+200 | 0–360° | 0,1 | |
| 4. Датчик линейных перемещений с нарезным штоком ДП-2 | –65…+200 | 0–150 мм | 0,5 | |
| 5. Датчик линейных перемещений с расширенным диапазоном измерений системы С 085 | 2500 °С в течение 2 с | (0–25), (0–40) мм | 1,0 | – разработанная тепловая модель бесконтактного ЭМДП; – патент, внедренный в датчике линейных перемещений системы С 085; – анализ экспериментальных исследований |
| 6. Датчик углового положения для контроля профиля трубы ПУИ 062 | –30…+50 | 0–80° | 1,0 | – разработанная математическая модель и инженерная методика расчета дифференциальных трансформаторных датчиков угловых перемещений с разомкнутым магнитопроводом; – разработанная базовая конструкция |
| 7. Двухканальный датчик угловых перемещений ПУИ 063 | –60...+70 | 0–120° | 0,2 | |
| 8. Датчик угловых перемещений ПУИ 064 | –60...+70 | 0–120° | 0,2 | |
| 9. Малогабаритный датчик угловых перемещений МДП | –60…+100 | 0–160° | 0,2 |
В шестой главе представлены результаты экспериментальных исследований, полученные в процессе выполнения работ по проектированию растровых сопряжений электромагнитных датчиков. Для подтверждения расчетных соотношений разработаны установки для экспериментальных исследований УМ-1, У-1, У-2, внешний вид которых представлен на рисунке 15. Разработанная установка УМ-1, с помощью которой проверялось влияние основных видов инструментальных погрешностей, представляет собой увеличенный в несколько раз ЧЭ, в котором возможно устанавливать определенные значения отклонений от заданных размеров элементов растровых торцевых сопряжений. Установки У-1 и У-2 использовались для проверки расчетов магнитной проводимости в торцевом и цилиндрическом растровом сопряжениях. С их помощью исследовались влияния параметров обмотки, геометрии растров, проведены работы по поиску оптимальных соотношений для разработки датчиков перемещений ПУИ 065,
ПУИ 065-01, ПЛИ 086.
 |  |  |
| а) | б) | в) |
а – внешний вид установки УМ-1; б – установка для исследования комбинационных
сопряжений с подвижными растрами У-1; в – установка для исследования
комбинационных сопряжений с подвижными обмотками У-2
Рисунок 15 – Установки для экспериментальных исследований
Анализ метрологических характеристик основных видов градуировочного и испытательного оборудования, использованного для проведения испытаний взаимоиндуктивных датчиков перемещений, подтвердил, что все оборудование полностью удовлетворяет эксплуатационным и точностным требованиям, предъявляемым к разработанным датчикам.
Проведены испытания датчика линейных перемещений системы
С 085 на воздействие повышенного давления. Определены динамические характеристики системы линейных перемещений С 085; схема проведения испытаний приведена на рисунке 16. Представлены основные результаты экспериментальных исследований датчика линейных перемещений при разных частотах питающего напряжения с различной толщиной якоря. По результатам исследований подтверждены основные технические и эксплуатационные характеристики разработанной бесконтактной системы для контроля линейных перемещений С 085.

Рисунок 16 – Схема определения АЧХ системы С 085
В главе приведено описание ИИ и УС контроля параметров шасси объекта Т-50, которая является составной частью комплексной системы управления объектом (рисунок 17). Система служит для контроля давления зарядки амортизаторов передней и основных опор шасси, контроля хода штоков амортизаторов передней и основных опор шасси, для выдачи в системы объекта разовых сигналов при обжатии передней и основных опор, для выдачи в системы объекта разовых сигналов по положению опор шасси. Контроль хода штоков, обжатия и положения опор осуществляется разработанными при участии автора датчиками ПУИ 064 и ПК 3.
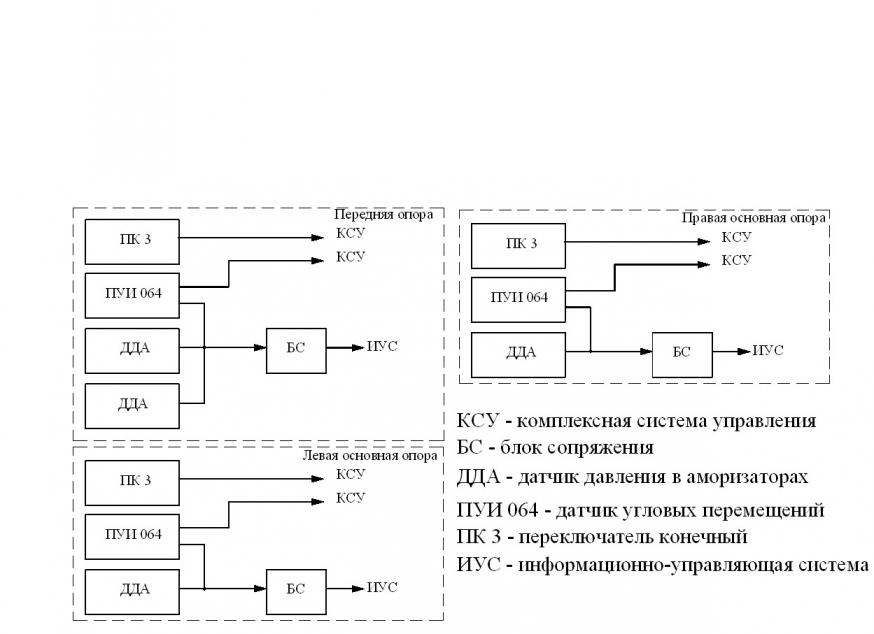
Рисунок 17 – Блок-схема системы контроля
параметров шасси объекта Т-50
В главе проведена сравнительная оценка технического уровня разработанных ЭМДП с «идеальным» образцом и лучшими мировыми аналогами; приведены циклограммы основных единичных показателей датчиков угловых и линейных перемещений, показывающие, что достигнутые технические характеристики разработанных датчиков перемещений соответствуют уровню лучших мировых аналогов.
ОСНОВНЫЕ РЕЗУЛЬТАТЫ И ВЫВОДЫ
Диссертационная работа является итогом теоретических и экспериментальных исследований автора по разработке ЭМДП для ИИУС специального назначения, в результате которых разработана теория проектирования нового класса ЭМДП с использованием растровых сопряжений, позволившая создать инженерные методики расчета и конструирования унифицированных рядов датчиков линейных и угловых перемещений с более высокими техническими характеристиками, нашедших широкое применение в авиационной и ракетно-космической технике.
Основные результаты и выводы работы сводятся к следующему:
1. В результате проведенного анализа электромагнитных датчиков перемещений, построенных на различных принципах преобразования, выявлены преимущества взаимоиндуктивных датчиков и разработана их систематизация по методам кодирования и квантования, что существенно облегчает выбор конструкции на ранних стадиях проектирования в зависимости от требований по метрологическим, габаритно-массовым показателям и условиям эксплуатации. Сформированы требования, предъявляемые к датчикам перемещений, работающим в составе ИИУС в жестких условиях эксплуатации.
2. Анализ основных типов взаимоиндуктивных ЧЭ позволил провести и обосновать выбор растровых ЧЭ с разработкой их обобщенных конструктивных схем для использования при построении датчиков перемещений систем специального назначения.
3. Разработанная физическая модель взаимоиндуктивных ЧЭ для растровых датчиков перемещений с цилиндрическим сопряжением растров показала, что для формирования математической расчетной модели целесообразно воспользоваться методами теории цепей с разработкой обобщенной схемы замещения. На базе предложенной автором обобщенной схемы замещения разработана математическая модель растровых ЭМДП
с цилиндрическим сопряжением растров и сформированы основные расчетные выражения для выходных сигналов с учетом сопротивлений утечки, сопротивлений магнитопровода и сопротивлений воздушного зазора.
4 Разработана математическая модель нестационарных тепловых процессов, протекающих в бесконтактном ЭМДП при различных условиях и режимах его работы; получены количественные и качественные оценки параметров этих процессов. Проведено математическое моделирование базовых тепловых режимов работы бесконтактного ЭМДП при воздействии температуры рабочей среды по заданному закону, позволяющее при разработке датчиков определять их работоспособность и рассчитывать элементы конструкции в зависимости от мощности и времени воздействия теплового потока.
5. На основе математической модели разработаны инженерные методики расчета конструктивных параметров растровых взаимоиндуктивных датчиков перемещений.
6. На основе предложенной систематизации инструментальных погрешностей растровых датчиков проведен метрологический анализ инструментальных погрешностей и определена зависимость между точностными и конструктивными параметрами датчиков, позволяющая на ранних стадиях разработки проводить выбор конструктивного исполнения исходя из заданных метрологических характеристик. Анализ метрологических характеристик позволил выявить источники основной и дополнительной погрешностей растровых датчиков перемещений при использовании амплитудно-логического метода обработки сигналов.
7. Проведенный анализ динамических погрешностей позволил определить зависимость между скоростью измеряемых перемещений, конструктивными параметрами и динамической составляющей погрешности.
8. На основе анализа путей создания унифицированных конструкций датчиков для ИИУС специального назначения предложен метод опережающего проектирования унифицированных рядов ЭМДП для перспективных изделий специальных отраслей.
9. Предложена функциональная схема унифицированного вторичного преобразователя, предназначенного для работы с растровыми ЭМДП, реализованная на базе микроконтроллера PIC18F2523 фирмы Microchip и внедренная в унифицированном преобразователе Б 014.
10. Разработаны экспериментальные установки для исследования ЧЭ растровых ЭМДП с цилиндрическим и торцевым сопряжением, с помощью которых исследовано влияние задаваемых значений допусков на величину инструментальных погрешностей и определены оптимальные соотношения растровых сопряжений (угол наклона, ширина и длина зубьев, число витков измерительных обмоток).
11. Разработаны базовые конструкции унифицированных рядов ЭМДП ИИУС, работающих в жестких условиях эксплуатации, приведены их конструктивные исполнения и основные технические характеристики.
12. Проведен анализ метрологических характеристик основных видов оснастки и градуировочного оборудования для проведения испытаний ЭМДП, полностью удовлетворяющий эксплуатационным и точностным требованиям, предъявляемым к разработанным датчикам. Выявлены резервы для совершенствования конструкций и улучшения технических характеристик разработанных датчиков.
13. Разработаны и внедрены конструкции датчиков угловых перемещений ПУИ 062, ПУИ 064, ПУИ 065, МДП и датчиков линейных перемещений С 085, ПЛИ 086, ДП-2 на предприятии-изготовителе
ОАО «НИИФИ». Результаты внедрения подтверждены соответствующими актами.
14. Учитывая сформулированные в диссертации перспективные требования, предъявляемые к ЭМДП разработчиками ИИУС специального назначения, в плане дальнейших работ предполагается значительно улучшить характеристики по точности, надежности, расширить эксплуатационные возможности за счет внедрения новейших достижений микроэлектроники и критических технологий, использования перспективных высокостабильных керамических материалов и микропроцессорных модулей.
Основные положения диссертации отражены
в следующих публикациях
Статьи, опубликованные в изданиях, рекомендованных ВАК
1. Трофимов, А. А. Вопросы разработки унифицированных конструкций датчиков для перспективных систем измерения и контроля специальной техники / А. Г. Дмитриенко, А. Н. Трофимов, А. А. Трофимов // Измерительная техника. – 2010. – № 10. – С. 18–21.
2. Трофимов, А. А. Способы совершенствования растровых взаимоиндуктивных датчиков перемещений / А. А. Трофимов, В. А. Зеленский // Известия Самарского научного центра РАН. – 2009. – № 2. – С. 275–278.
3. Трофимов, А. А. Расширение температурного диапазона растровых трансформаторных датчиков перемещений / А. А. Трофимов,
А. Н. Трофимов // Измерительная техника. – 2009. – № 6.
4. Трофимов, А. А. Основные задачи унификации и стандартизации при разработке датчиков перемещений специального назначения /
А. А. Трофимов // Измерительная техника. – 2008. – № 12. – С. 56–58.
5. Трофимов, А. А. Расчет магнитной проводимости в многооборотном датчике больших линейных перемещений / А. А. Трофимов // Датчики и системы. – 2008. – № 6. – С. 7–10.
6. Трофимов, А. А. Многофункциональный датчик перемещений с цифровым выходом / А. А. Трофимов, А. А. Мельников, В. Б. Цыпин // Датчики и системы. – 2008. – № 6. – С. 37–40.
7. Трофимов, А. А. Датчик угловых перемещений для системы контроля параметров шасси / А. А. Трофимов, В. Н. Новиков, С. Ф. Горбунов // Датчики и системы. – 2008. – № 7. – С. 55–58.
8. Трофимов, А. А. Унифицированный ряд высокотемпературных растровых электромагнитных датчиков перемещений / А. Н. Трофимов,
А. В. Блинов, А. А. Трофимов // Датчики и системы. – 2007. – №7. –
С. 24–29.
9. Трофимов, А. А. Система измерения линейных перемещений /
В. А. Гаврилов, А. А. Трофимов // Датчики и системы. – 2005. – № 9. –
С. 44–46.
10. Трофимов, А. А. Датчик угловых перемещений / А. А. Трофимов // Датчики и системы. – 2005. – № 9. – С. 13–14.
11. Трофимов, А. А. Трансформаторные датчики перемещений с расширенным диапазоном измерений / А. А. Трофимов, Н. Д. Конаков // Датчики и системы. – 2005. – № 9. – С. 8–10.
12. Трофимов, А. А. Датчик углового положения лопаток направляющих аппаратов компрессора / Н. И. Баринов, А. А. Трофимов // Измерительная техника. – 2004. – № 5. – С. 43–45.
13. Трофимов, А. А. Датчики углового положения для внутритрубного профилемера / Н. И. Баринов, А. А. Трофимов // Датчики и системы. – 2004. – № 2. – С. 37–39.
Монография и учебные пособия
14. Трофимов, А. А. Взаимоиндуктивные датчики перемещений : моногр. / А. А. Трофимов, А. Н. Трофимов. – Пенза : Изд-тво Пенз. гос.
ун-та, 2009. – 174 с.
15. Трофимов, А. А. Датчики механических величин : учеб. пособие / Е. А. Мокров, Ю. М. Крысин, А. А. Трофимов, А. Л. Шамраков. – Пенза : Инф.-изд. центр ПензГУ, 2009. – 152 с.
16. Трофимов, А. А., Преобразование измерительных сигналов: учеб. пособие / А. А. Трофимов, Ю. М., Крысин, А. Н., Трофимов. – Пенза : Изд-во Пенз. гос. ун-та, 2007. – 104 с.
17. Трофимов, А. А. Методы технической диагностики : учеб. пособие / А. Н. Трофимов, Б. В. Цыпин, А. А. Трофимов. – Пенза : Инф.-изд. центр ПензГУ, 2006. – 121 с.
Статьи, опубликованные в других изданиях
18. Трофимов, А. А. Создание многофункциональных средств измерения физических величин для промышленных систем управления /
С. В. Ионов, В. В. Козлов, М. Г. Мясникова // Перспективные информационные технологии для авиации и космоса : избр. труды Междунар. конф. – Самара, 2010. – С. 102–104.
19. Трофимов, А. А. Разработка унифицированных конструкций датчиков для перспективных систем измерений и контроля специальной техники / А. Г. Дмитриенко, А. В. Блинов, А. Н. Трофимов, А. А. Трофимов // Актуальные проблемы ракетно-космического приборостроения и информационных технологий : сб. докл. науч.-техн. конф. – М. : Радиотехника, 2010.
20. Трофимов, А. А. Растровый трансформаторный датчик линейных перемещений с нарезным штоком / А. А. Трофимов // Проблемы автоматизации и управления в технических системах : сб. трудов Междунар. науч.-технич. конф. – Пенза, 2009. – С. 187–189.
21. Трофимов, А. А. Направления развития перспективных датчиков перемещений специального назначения / А. А. Трофимов, А. Н. Трофимов, Д. И. Нефедьев // Проблемы автоматизации и управления в технических системах : сб. трудов Междунар. науч.-техн. конф. – Пенза, 2009. –
С. 189–191.
22. Трофимов, А. А. Инструментальные погрешности трансформаторных датчиков перемещений с торцевым сопряжением растров /
А. А. Трофимов, А. Н. Трофимов // Информационно-измерительная техника : межвуз. сб. ст. – Пенза, 2009. – Вып. 34. – С. 26–34.
23. Трофимов, А. А. Об особенностях технологии изготовления высокотемпературного датчика линейных перемещений / А. А. Трофимов,
Д. И. Нефедьев // Технологии производства перспективных МЭМС-приборов : сб. матер. межотрасл. конф. / ЗАТО, г. Заречный Пензенской обл., ФГУП ФНПЦ «ПО Старт». – Заречный, 2009. – С. 37–42.
24. Трофимов, А. А. Растровые датчики перемещений для работы в жестких условиях эксплуатации / А. А. Трофимов, В. А. Зеленский // Автоматизация, диагностика и контроль технологических процессов и оборудования : межвуз. сб. науч. трудов. – Самара : СГТУ, 2008. – С. 9–14.
25. Трофимов, А. А. К вопросу унификации датчиков перемещений / А. А. Трофимов // Состояние и проблемы измерений : сб. докл. 10-й Всерос. науч.-техн. конф. / МГТУ им. Н.Э. Баумана. – М., 2008. – С. 60–63.
26. Трофимов, А. А. Инструментальные погрешности растровых трансформаторных датчиков перемещений / А. А. Трофимов, Д. А. Скаморин, В. Б. Цыпин // Информационно измерительная техника : межвуз. сб. ст. – Пенза, 2008. – Вып. 32. – С. 144–-152.
27. Трофимов, А. А. Задачи унификации при разработке датчиков перемещений, работоспособных в жестких условиях эксплуатации /
А. А. Трофимов, С. В. Ионов // Проблемы автоматизации и управления в технических системах : сб. тезисов Междунар. науч.-техн. конф. – Пенза, 2008. – С. 157–160.
28. Трофимов, А. А. Малогабаритный датчик угловых перемещений с цифровым выходом / А. А. Трофимов, В. Б. Цыпин // Измерения–2008 : сб. матер. Междунар. науч.-техн. конф. – Пенза, 2008. – С. 133–136.
29. Трофимов, А. А. Динамические погрешности растровых трансформаторных преобразователей перемещений / А. Н. Трофимов,
А. А. Трофимов, С. В. Ионов // Информационно-измерительная техника : межвуз. сб. ст. – Пенза, 2008. – Вып. 32. – С. 117–124.
30. Трофимов, А. А. Высокотемпературные преобразователи перемещений / А. Н. Трофимов, А. В. Блинов, А. А. Трофимов // Мир измерений. – 2007. – № 11. – С. 42–46.
31. Трофимов, А. А. К вопросу разработки трехканального датчика угловых перемещений / А. А. Трофимов // Информационно-измерительная техника : межвуз. сб. ст. – Пенза, 2007. – Вып. 31. – С. 48–56.
32. Трофимов, А. А. Результаты разработки тепловой модели датчика линейных перемещений / А. А. Трофимов, Д. А. Скаморин // Надежность и качество : сб. докл. Междунар. симп. – Пенза, 2007. – Т. 1. –
С. 371–373.
33. Трофимов, А. А. Направление совершенствования датчиков перемещений и частоты вращения разработки НИИ физических измерений / А. Н. Трофимов, А. А. Трофимов // Актуальные проблемы ракетно-космического приборостроения и информационных технологий : сб. докл. науч.-техн. конф. – М. : РНИИКП, 2007.
34. Трофимов, А. А. Результаты разработки базовых конструкций цифровых электромагнитных датчиков перемещений и частоты вращения / А. Н. Трофимов, А. А. Трофимов // Информационно-управляющие и измерительные системы : сб. тезисов докладов науч.-техн. конф. – Королев : НПОИТ, 2007. – С. 61.
35. Трофимов, А. А. Преобразователи пульсации давления, акустических давлений, осевых и радиальных биений, частоты вращения и угловых перемещений для авиационно-космической техники нового поколения /
А. Н. Трофимов, А. Л. Шамраков, А. А. Трофимов // Авиация и космонавтика : сб. докладов 5-й Междунар. конф. – М. : МАИ, 2006. – С. 194–195.
36. Трофимов, А. А. Унифицированный ряд высокотемпературных растровых трансформаторных преобразователей перемещений / А. Н. Трофимов, А. В. Блинов, А. А. Трофимов // Датчики и системы : сб. докл. конф. – М. : Дом оптики, 2006. – С. 101–104.
37. Трофимов, А. А. Микропроцессорная обработка сигналов растровых трансформаторных датчиков перемещения / Б. В. Цыпин, А. А. Мельников, С. В. Ионов, А. А. Трофимов // Измерения–2006 : сб. материалов Междунар. науч.-техн. конф. – Пенза, 2006. – С. 70–72.
38. Трофимов, А. А. Конструктивные и схемные решения, примененные при разработке системы измерения линейных перемещений С 085 / В. А Гаврилов, А. А. Трофимов // Датчики и системы : сб. докл. Междунар. науч.-техн. конф. – Пенза, 2005. – С. 473–475.
39. Трофимов, А. А. Датчик угловых перемещений / А. А. Трофимов // Датчики и системы : сб. материалов Междунар. науч.-техн. конф. – Пенза, 2005. – С. 411–412.
40. Трофимов, А. А. Датчики для системы бортовых и наземных измерений авиационной техники в разработках НИИФИ / А. Н. Трофимов,
Н. И. Баринов, А. А. Трофимов // Авиация и космонавтика : сб. докл.
4-й Междунар. конф. – М. : МАИ, 2005. – С. 101.
41. Трофимов, А. А. Измерительные преобразователи пульсации давления, акустического давления, частоты вращения, осевых и радиальных биений валов для авиационно-космической техники нового поколения / А. Л. Шамраков, Н. И. Баринов, А. А. Трофимов // Авиадвигатели ХХI века : сб. тезисов 2-й Междунар. науч.-техн. конф. – М. : ЦИАМ им. П. И. Баранова, 2005. – Т. 3. – С. 54–55.
42. Трофимов, А. А. Обобщенная схема замещения растровых датчиков угловых и линейных перемещений / Е. А. Ломтев, А. А. Трофимов // Информационно-измерительная техника : межвуз. сб. ст. – Пенза, 2004. – Вып. 29. – С. 19–25.
43. Трофимов, А. А. Датчик углового положения / Н. И. Баринов,
А. А. Трофимов // Проблемы и перспективы развития двигателестроения : сб. материалов Междунар. науч.-техн. конф. – Самара, 2003. –
С. 208–210.
44. Трофимов, А. А. Датчик углового положения направляющих аппаратов компрессора / Н. И. Баринов, А. А. Трофимов // Датчики и детекторы для авиационной техники : сб. докл. науч.-техн. конф. – Пенза, 2003. – С. 65–66.
45. Трофимов, А. А. Анализ методов обработки периодических выходных сигналов аналого-цифровых преобразователей перемещений /
Ю. М. Крысин, А. А. Трофимов // Информационно-измерительная техника : сб. материалов конф. – Пенза, 2003. – Вып. 28. – С. 10–16.
46. Трофимов, А. А. Взаимоиндуктивные высокотемпературные преобразователи перемещений, основные конструктивные исполнения и технические характеристики / А. Н. Трофимов, А. А. Трофимов // Информационно-управляющие и измерительные системы : сб. тезисов докл. науч.-техн. конф. – Королев : НПОИТ, 2003. – С. 71–73.
47. Трофимов, А. А. Моделирование воздействия неоднородных нестационарных тепловых полей на датчики давления и перемещений /
Е. А. Мокров, Д. В. Тихомиров, А. А. Трофимов // Научно-технический семинар. – Таганрог, 2003. – С. 89–93
48. Трофимов, А. А. Датчики углового положения для внутритрубного профилемера / Н. И. Баринов, А. А. Трофимов // Нефтегазовая отрасль: тенденции и перспективы развития : сб. материалов конф. – Саратов, 2002. – С. 20–21.
49. Трофимов, А. А. Универсальный растровый трансформаторный датчик перемещений / Н. И. Баринов, А. А. Трофимов // Человек и Космос : сб. материалов конф. – Днепропетровск, 2002. – С. 312.
50. Трофимов, А. А. Высокотемпературные датчики перемещений на основе металлокерамических катушек индуктивности / Н. Д. Конаков,
А. А. Трофимов // Датчики и Системы : сб. российско-германской конф. – СПб., 2002. – С. 242–245.
51. Трофимов, А. А. Многофункциональный датчик перемещений / А. А. Трофимов // Измерения–2002 : сб. материалов Междунар. науч.-техн. конф. – Пенза, 2002. – С.40–41.
52. Трофимов, А. А. Бесконтактный датчик перемещений на основе металлопленочного чувствительного элемента / А. А. Трофимов // Методы и средства измерения в системах контроля и управления : сб. трудов Междунар. конф. – Пенза, 2002. – С. 41–42.
53. Трофимов, А. А. Растровый трансформаторный датчик угловых перемещений / А. Н. Трофимов, А. А. Трофимов // Методы и средства измерения в системах контроля и управления : сб. трудов Междунар. конф. – Пенза, 2002. – С. 19–20.
54. Трофимов, А. А. Трансформаторные датчики перемещений, работоспособные в широком диапазоне температур / А. Н. Трофимов,
А. А. Трофимов // Состояние и проблемы измерений : сб. докл. 8-й Всерос. науч.-техн. конф. / МГТУ им. Н. Э. Баумана. – М., 2002. – Ч. 1.– С. 95–96.
55. Трофимов, А. А. Некоторые результаты использования двойных технологий при разработке датчиков для систем безопасности АЭС /
А. Н. Трофимов, А. А. Папко, А. А Роганов, А. А. Трофимов // Топливно-энергетический комплекс России: региональные аспекты : сб. материалов Междунар. форума. – СПб., 2002. – С. 229–-233.
56. Трофимов А. А. Датчики угловых перемещений для внутритрубного профилемера / Н. И. Баринов, А. А. Трофимов // Аналитика, диагностика и средства автоматизации для нефтегазового комплекса : сб. докл.
4-го ежегодного науч.-техн. семинара / ВНИИТФА–ГЦИПК. – М.. 2002. – С. 33–39.
57. Трофимов, А. А. Анализ инструментальных погрешностей растровых трансформаторных преобразователей / А. А. Трофимов // Методы и средства измерения в системах контроля и управления : сб. материалов ВНТК. – Пенза, 2001. – С. 14–15.
58. Трофимов, А. А. Результаты исследований возможности расширения диапазона измерения бесконтактных амплитудно-фазовых трансформаторных датчиков линейных перемещений / А. А. Трофимов,
Н. Д Конаков // Методы и средства измерения в системах контроля и управления : сб. материалов ВНТК. – Пенза, 2001. – С. 15–17.
59. Trofimov, A. A. A detector of angular position of the guide vanes of a compressor / N. I. Barinov, A. A. Trofimov // Measurement Techniques. – Springer New York. – 2004. – May. – Vol. 47. – № 5. P. 484–486.
60. Trofimov, A. A. Main problems of the unification and standardization in developing special purpose displacement transducers / A. A. Trofimov // Measurement Techniques. – Springer New York. – 2008. – December. – Vol. 51. – № 12. – P. 1347–1350.
61. Trofimov, A. A. Expanding the temperature range of raster differential-transformer displacement transducers / A. N. Trofimov, A. A. Trofimov // Measurement Techniques. – Springer New York. – 2009. – June. – Vol. 5. –
№ 6. – P. 593–596.
62. Trofimov, A. A. Development of uniform designs of transducers for prospective measurement and control systems for specially engineered instruments / A. G. Dmitrienko, A. N. Trofimov, A. A. Trofimov // Measurement Techniques. – Springer New York. – 2010. – October. – Vol. 53. – № 10. – P. 1107–1112.
Патенты
63. Пат. 2340878 РФ. Датчик для контроля уровня жидкости / Бари-
нов Н. И., Трофимов А. А., Глухов О. Д., Конаков Н. Д. – Опубл. 2008,
Бюл. № 34.
64. Пат. на полезную модель 63143 РФ. Растровый трансформаторный преобразователь перемещения в код / Мокров Е. А., Цыпин Б. В., Трофимов А. Н., Мельников А. А., Трофимов А. А. – Опубл. 2007,
Бюл. № 13.
65. Пат. 2208762 РФ. Амплитудно-фазовый трансформаторный датчик перемещений с фазовым выходом / Трофимов А. А., Конаков Н. Д., Глухов О. Д. – Опубл. 2003, Бюл. № 20.
Научное издание
Трофимов Алексей Анатольевич
Унифицированные электромагнитные датчики перемещений для систем специального назначения
Специальность 05.11.16 – Информационно-измерительные
и управляющие системы (приборостроение)
Подписано в печать 23.03.2011. Формат 60841/16.
Усл. печ. л. 2,09.
Заказ № 194. Тираж 100.
Пенза, Красная, 40, Издательство ПГУ
Тел./факс: (8412) 56-47-33; e-mail: [email protected]