

» средстваизмерительного преобразовани€ скорости движени€плазмы дл€ информационно-измерительных и управл€ющих систем электродинамическихускорителей
Ќа правах рукописи
»–»≈¬— »…≈вгений ¬ладимирович
ћ≈“ќƒџ » —–≈ƒ—“¬ј»«ћ≈–»“≈Ћ№Ќќ√ќ ѕ–≈ќЅ–ј«ќ¬јЌ»я
— ќ–ќ—“» ƒ¬»∆≈Ќ»яѕЋј«ћџ ƒЋя »Ќ‘ќ–ћј÷»ќЌЌќ-»«ћ≈–»“≈Ћ№Ќџ’
» ”ѕ–ј¬Ћяёў»’ —»—“≈ћ ЁЋ≈ “–ќƒ»Ќјћ»„≈— »’”— ќ–»“≈Ћ≈…
—пециальность 05.11.16 Ц »нформационно-измерительные иуправл€ющие
системы (вмашиностроении)
ј¬“ќ–≈‘≈–ј“
диссертации на соискание ученой степени
доктора техническихнаук
Ќовочеркасск ≠≠Ц2009
–абота выполнена на кафедре Ђ»нформационно-измерительна€ имедицинска€техникаї
√ќ” ¬ѕќ Ђёжно-–оссийскийгосударственный технический университет
(Ќовочеркасскийполитехнический институт)
| Ќаучныйконсультант | доктор технических наук,профессор √орбатенко Ќиколай»ванович |
| ќфициальные оппоненты: | доктор технических наук,профессор «а€рный ¬€чеслав ѕетрович. |
| доктор технических наук,профессор —ипливый ЅорисЌиколаевич. | |
| доктор технических наук,профессор ‘андеев ≈вгений »ванович. | |
| ¬едуща€организаци€ | ћосковский инженерно-физический институт (техническийуниверситет) - ћ»‘» |
«ащита состоитс€Ђ6їфеврал€ 2009 г.в ______ часов назаседании диссертационного совета ƒ 212.028.05при ¬олгоградском государственномтехническом университете по адресу: 400131, г.¬олгоград, пр. Ћенина, 28, ауд. 209. — диссертацией можноознакомитьс€ в библиотеке ¬олгоградскогогосударственного технического университета јвтореферат разосланЂ____ї _____________ 200_ г. ”ченыйсекретарь диссертационногосовета ќ.ј. јвдеюк | |
ќЅўјя’ј–ј “≈–»—“» ј –јЅќ“џ
јктуальностьтемы. “ехнологи€ разгона плазмы итолкаемых ею тел с помощью магнитоплазменных электродинамическихускорителей (Ёƒ”) в последние двадес€тилети€ активно развиваетс€ как за рубежом,так и в нашей стране. »сследованию проблемэлектрофизики, св€занных сЁƒ”, посв€щены труды отечественных изарубежных ученых (јрцимович Ћ.ј.,Ѕабаков ё. ѕ., Ѕашкатов ё. Ћ., ¬енгерский¬.¬., ¬елихов ≈.ѕ., √аланинћ.ѕ., √линов ј.ѕ., √лухих ¬. ј.,ƒодотченко¬.¬., ƒрейзин ёј., ƒробышевский ≈. ћ.,∆елезный ¬. ¬., ∆уков Ѕ.ѕ., »ерусалимска€ ».¬., алихман —.ј., алюжный ¬.≈., ол€дин Ќ.ћ., ондратенко ј. , удр€вцев ј.¬., узнецов¬.ћ., узнецов ћ.ћ., учинский ¬. √., Ћеонов—.ј., Ћотоцкий ј.ѕ., ћинайлос ј.Ќ., Ќечаев Ќ.Ќ., ќлейникЌ.»., ќсташев¬.≈., ѕерков —.ј., ѕисьменный¬.ƒ,, ѕлеханов ј.¬., ѕолищук ¬.ѕ., ѕолтанов ј.≈., ѕол€нский ќ.ё.,–утберг ‘.√., —афонов ¬.»., —тадниченко ».ј.,—урков ј.—., “ерентьев ¬.√., “итов ¬. ћ.,Ўамраев ».ћ., Ўвецов √. ј., Ўкольников Ё.я. и др., Batten J.H.,Brooks A.L., Deadrick F.D., Fowler C.M., Hawke R.S, Kemmey P. J., Marshall R.A., Peterson O.R., Powel J.D.,Usuba S.и др.).
ќдной из основныхпроблем в этой области€вл€етс€ создание информационно-измерительных иуправл€ющихсистем(»»”—) Ёƒ” сцелью обеспечени€ управл€емого разгона плазмы (толкаемых еютел) ирегистрациирезультатов эксперимента.–ешение этой проблемы св€зано с необходимостью получени€ измерительнойинформации о скоростидвижени€ системыЂплазменный поршень (ѕѕ) Ц разгон€емоетелої вканале Ёƒ”.ѕри этом достигаютс€ две цели: во-первых,измерение ирегистраци€параметров движени€ на участке внутренней баллистики (вканале Ёƒ”) и,во-вторых, допусковый контрольскорости разгона дл€ формировани€ подсистемой автоматического управлени€ (—ј”)»»”— Ёƒ”в рассчитанный моменткоманды на прекращение подвода энергии к Ёƒ”дл€ стабилизациизаданной скорости на выходе. ƒо недавнего времени решалась только перва€задача, а втора€ задача находилась в стадиипостановки. ¬первые задача управл€емого разгона ѕѕи тел в Ёƒ” путемстабилизации заданной скорости была теоретическисформулирована ученымиЌ»»прикладной механики и электродинамики ћј» и ÷Ќ»»ћашиностроени€ јзановым ».Ѕ.,јлександровым ¬.ј., ќбыденниковым —.—.,“ютиным ¬. ., ’русталевым ћ.ћ., ёдасом¬.»., которымибыл предложен алгоритмуправлени€ разгоном с механизмом пам€ти и коррекцией скорости путем использовани€ измерительнойинформации дл€ вычислени€ в режиме on-line с несколькимиуточнени€ми момента формировани€команд на прекращение подвода энергиик Ёƒ”. Ётот алгоритмуправлени€ обеспечивает высокуюточность (погрешностьстабилизациискорости не более
ќднако такой перспективный путь решени€проблемы управл€емого разгона сталкиваетс€ ср€домнерешенныхзадач,св€занных с созданием важнейшего элемента »»”— Ёƒ” - измерительногопреобразовател€ скорости (»ѕ—)движени€ ѕѕ. —реди них:обоснование методологии выбора принципа управлени€ Ёƒ”дл€ обеспечени€ стабилизации скоростиѕѕ иопределени€требований ксоотношению точности и быстродействи€»ѕ—; систематизаци€ известных методов и принциповпостроени€»ѕ—; исследование вли€ни€ параметров системыУрельсотрон Ёƒ”-датчики положени€ ѕѕФ на выходные сигналыдатчиковположени€; метрологический анализ »ѕ— и оценка путейснижени€ различных составл€ющих погрешностиизмерени€; разработка математической модели системы ЂЁƒ” Ц »ѕ—ї дл€проведени€ вычислительных экспериментовпо исследованию точностных характеристикалгоритмов измерительного преобразовани€скорости ѕѕ вЁƒ”; разработка методов параметрического и структурногосинтеза »ѕ— идр.
Ќерешенностьэтих задач требует проведени€дополнительных исследований и обобщени€их
результатов. ѕоскольку точность управлени€разгоном и достижение заданныхбаллистических характеристик разгон€емых ѕѕ и тела завис€тот качества контрол€ их скорости, а в мировойпрактике до сих пор отсутствовали методы исредства измерительногопреобразовани€ мгновенной скоростиразгона ѕѕ ител в Ёƒ”, задачаразработки »ѕ— дл€ »»”—Ёƒ” €вл€етс€ актуальной.
ƒанна€ диссертаци€посв€щена разработке методов исредств измерительногопреобразовани€ параметров движени€ ѕѕ и ускор€емыхтел дл€»»”— Ёƒ”. –аботы порешению этой проблемы втечение р€да лет выполн€лись в рамках целевой комплекснойнаучно-технической программы Ђ ачество и безопасностьї,утвержденной совместными приказамићинвуза –—‘—– є28/82 от 26.02.81г. и ћинистерствамашиностроени€ ———– є91/92 от 24.02.87г., в соответствии сЂѕеречнем ѕриоритетных направлений развити€ науки итехники и критических технологийфедерального уровн€ї (раздел Ђѕроблемыуправлени€ и автоматизацииї),утвержденными ѕостановлением ѕравительства –‘ от17.04.95 г. є360, Ђѕеречнем критических технологий –оссийской‘едерацииї, утвержденным ѕрезидентом –‘ 21.05.06 г. є ѕр-842(разделыЂ“ехнологии обработки,хранени€, передачи и защиты информацииї,Ђ“ехнологии создани€ интеллектуальныхсистем навигации и управлени€ї), всоответствии с тематикой по единымзаказ-нар€дам ћинобразовани€ –‘:Ђ“еоретические основы и математическоемоделирование специальных системуправлени€, измерени€ и диагностикиїє1.10.99‘, є1.6.99‘, є1.7 99‘ и є1.9.99‘ї и по научному направлению ё–√“” (Ќѕ») Ђ“еори€ и принципы построени€информационно-измерительных систем исистем управлени€ї (утверждено решениемученого совета университета от 25.01.03).
јктуальность ифундаментальность темы насто€щегонаучного исследовани€ подтверждаетс€ ееподдержкой –‘‘» в 2008 году (грант08-08-00667-а по проекту Ђ–азработка основтеории и методов проектировани€систем автоматическогоконтрол€ параметров движени€ плазмы вмагнитоплазменных электродинамических ускорител€х суправл€емым разгономї).
÷елью диссертационнойработы €вл€етс€ создание научнойбазы проектировани€ измерительных преобразователейсредней, квазимгновенной и мгновеннойскорости разгона ѕѕ как элементов»»”— Ёƒ”путем проведени€ комплекса теоретическихисследований и разработки новых методовизмерительного преобразовани€скорости, параметрического и структурногосинтеза »ѕ—, что позволит повысить точностьконтрол€ скорости ѕѕ и качество управлени€магнитоплазменными Ёƒ”.
¬соответствии с поставленнойцельюв диссертационной работе решались следующие основныезадачи:
1. ¬ыбор алгоритмауправлени€ Ёƒ” дл€ стабилизации скоростиѕѕ и анализ требований к точности »ѕ— какэлемента »»”—Ёƒ”.
- »сследованиезакона движени€ ѕѕ в Ёƒ” методомвычислительного эксперимента и анализ требований ксоотношению точности и быстродействи€ »ѕ— какэлемента »»”—.
- ќбоснованиебазового метода измерени€ скорости наоснове анализа современного состо€ни€ проблемыконтрол€ параметров движени€ ѕѕ и тел вЁƒ”.
- –азработкаструктурных и параметрических методовповышени€ помехозащищеннос≠ти »ѕ—.
- »сследованиеметодом вычислительного экспериментавли€ни€ на сигналыдатчиков параметров системыУдвижущийс€ѕѕ - датчики положени€Ф.
- ћетрологическийанализ базового метода измерени€ скорости.
- –азработкаматематической модели системы ЂЁƒ” Ц »ѕ—ї и программдл€ вычислительных экспериментов по исследованиюточности алгоритмов измерительногопреобразовани€ скорости движени€ ѕѕ вЁƒ”.
- –азработка иисследование на Ё¬ћ методовизмерительного преобразовани€ квазимгновенной и мгновеннойскорости разгона ѕѕ вЁƒ”.
- –азработкаметодологии структурногоипараметрического синтеза »ѕ—.
ћетодыисследовани€ идостоверность результатов. ѕоставленные вдиссертации задачи решались с использованием комплексного подхода, основанного на теоретическоманализе и вычислительном эксперименте.ѕри теоретическом анализе использовались методы теорий: дифференциального и интегрального исчислени€,математического анализа, комбинаторного анализа, веро€тностей и математической статистики,статистических решений, электромагнитного пол€, случайныхпроцессов, нечеткихмножеств, многокритериального ранговогоанализа, измерений иметрологии, информации,оптимальных методов приемапри флуктуационных помехах,параметрического иструктурного синтеза систем, экспертныхоценок. ¬ вычислительном экспериментеиспользоваласьтеори€ алгоритмов и программ, методыимитационного моделировани€.
ƒостоверность научных результатоввыполненных диссертационных исследованийподтверждаетс€ корректным применениемматематических методов и общеприн€тыхтеорий, обоснованных математическихмоделей, методик расчета, алгоритмовсинтеза »ѕ—, использованием вматематических модел€х в качествеисходных данных известныхэкспериментальных результатов,сопоставлением полученных данных сизвестными теоретическими иэкспериментальными результатами,согласованием теоретических положений срезультатами имитационного моделировани€,непротиворечивостью математическихвыводов и преобразований, а такжеподтверждена использованием основныхрезультатов диссертации припроектировании, внедрении разработанных»ѕ— в р€де отраслей промышленности иопытом их длительной эксплуатации сиспользованием при проведенииэкспериментальных исследований узаказчиков только поверенной высокоточнойаппаратуры и аттестованных специальныхизмерительных стендов. ѕрин€тые допущени€не противоречат физике рассматриваемыхпроцессов и €вл€ютс€ общеприн€тыми прирешении соответствующих задач.
Ќа защитувынос€тс€:
1.ѕринцип понижени€ динамическойпогрешности измерени€ скорости ѕѕ (тела) вЁƒ” с питанием от емкостного накопител€энергии, основанный на использованиирежима измерени€ мгновенной скорости на участкахквазиравномерного движени€,соответствующих окрестност€м точекперехода токаплазмы черезнуль.
2. омплексна€ математическа€ модель системыЂмагнитоплазменный Ёƒ”Ц »ѕ—ї дл€ выполнени€сравнительного анализа по точностиалгоритмов вычислени€ скорости (структур»ѕ—), основанна€ на совместномиспользовании: модели движени€ ѕѕ в Ёƒ” набазе модифицированной системы уравненийјрцимовича; численной моделиэлектромагнитного пол€ от тока в ѕѕ;модели индукционного датчика положени€проводника с током; моделей различныхалгоритмов вычислени€ скорости движени€ ѕѕ.
3. омплекс расчетных формул, обеспечивающихопределение скоростных, временныхпараметров,положени€ движущегос€ ѕѕ и методическихпогрешностей измерени€ скорости сиспользованием различных вариантовврем€пролетного метода.
4. ћетодизмерительного преобразовани€ средней иквазимгновенной скорости, основанный наформировании промежуточных точек опросамежду двум€ группами датчиков положени€путем попарной коммутации датчиков обеихгрупп и обеспечивающий повышение точностиизмерени€ на участках траектории между группамидатчиков.
5. ћетодкоординатной функции с р€дом модификаций,обеспечивающих повышение его эффективности, дл€измерительного преобразовани€квазимгновенной и мгновенной скорости ѕѕ,основанный наформировании специальной функции,завис€щей только от положени€ ѕѕ, иобеспеченииее инвариантности к сопутствующимпараметрам и факторам.
6. ћетодизмерительного преобразовани€ скоростиѕѕ, основанный на использовании вкачествеинформативных параметров электрическоготока в цепи ѕѕ и геометрического среднегосигналовдатчиков положени€, отличающегос€зависимостью только от скорости и тока вцепи ѕѕ и инвариантного ко всем мешающимфакторам, чтопозвол€ет повысить помехозащищенность »ѕ—за счет замены операции дифференцировани€на операцию непрерывного измерени€ тока вѕѕ.
7.ћетодики структурного и параметрическогосинтеза измерительных преобразователейсредней,квазимгновенной и мгновенной скорости ѕѕ,в том числе с применением элементовинтеллектного управлени€.
8. омплекс алгоритмов и программ дл€ Ё¬ћ,структур и схемотехнических решений,реализующих предложенныематематические модели и методыизмерительного преобразовани€параметровдвижени€ дл€ »»”— Ёƒ”.
Ќаучна€ новизнаработы состоит вследующем:
1. ¬первые предложен итеоретически обоснован простой алгоритмуправлени€ и стабилизации скорости ѕѕ вЁƒ” с управл€емым разгоном, основанныйна измерении мгновенной скорости ѕѕ иоднократном расчете в процессе разгона ѕѕмомента прекращени€ подвода энергии Ёƒ”,который, в отличие от известногосложного алгоритма, основанного на измерениир€да параметров, в том числе средней скоростии ускорени€ ѕѕ, не требует введени€механизма пам€ти и выполнени€ в процессеразгона ѕѕ многократногоитерационного расчетамомента прекращени€ подвода энергии к Ёƒ”,что в результате обеспечивает упрощение и повышениенадежности »»”— Ёƒ” при сохраненииточности управлени€ разгоном истабилизациискорости ѕѕ.
2. Ќа основе вы€вленныхи изученных особенностей закона движени€ѕѕ в рельсотроне Ёƒ” сформулированытребовани€ к соотношению точности ибыстродействи€ »ѕ—, дл€ обеспечени€котороговпервые предложено использование режимапрерывистого измерени€ мгновеннойскорости на участках квазиравномерногодвижени€ ѕѕ, что позволило снизить допренебрежимо малых значений динамическуюпогрешность измерени€ скорости и повысить точность»»”— Ёƒ”.
3. ¬первые исследовановли€ние параметров системы Удвижущийс€ ѕѕ-датчикиположени€Ф на выходнойсигнал »ƒ, что позволило разработатьрекомендации пообоснованному выбору конструктивныхпараметров »ƒ и –– на их основе дл€ обеспечени€ требуемыхточностных характеристик »ѕ— приреализации врем€пролетного метода измерени€скорости.
4. ¬первые выполненметрологический анализ основныхпогрешностей врем€пролетного метода измерени€скорости ѕѕ в Ёƒ”, в результате чего получены предельные оценкисоставл€ющих инструментальной погрешностиизмерени€ средней и мгновенной скорости;с использованием информационного подходаустановлена аналитическа€ зависимостьмежду погрешностью интерпол€ции ичисломдатчиков положени€ в –– , что позвол€етпри проектировании »ѕ— »»”— Ёƒ” определ€тьколичество точек опроса, обеспечивающеепренебрежимо малую погрешностьинтерпол€ции. Ќа основе полученных аналитическихзависимостей, св€зывающих динамическуюпогрешность с рабочим диапазономскоростей и конструктивными параметрами–– выработаны методическиерекомендации по снижению динамическойпогрешности выбором соотношенийпараметров –– и впервые установлено, что дл€минимизации динамической погрешности »¬»необходимо обеспечить нормализацию формысигнала на выходе датчиков положени€, приближа€еЄ к форме гауссова сигнала, дл€ чегопредложено включать интеграторы на выходе»ƒ или использовать вместопоследних датчики’олла.
5. ѕредложен,запатентован и исследован новый базовыйметод измерительногопреобразовани€ скорости движени€ ѕѕ - Ђметодкоординатной функцииї, основанныйна одновременном использованиивыходных сигналов двух датчиков положени€,между которыми движетс€ ѕѕ с последующимвычислением различных вариантов ихфункции отношени€, что обеспечиваетинвариантность ‘ ко всем параметрам, кромеположени€ ѕѕ, и на его основеразработан р€д запатентованных методовизмерительного преобразовани€ скоростидвижени€ ѕѕ (с использованиемпрограммируемой попарной коммутациидатчиков положени€; сочетани€ нулевого,дифференциального и логометрическогометодов измерени€; геометрическогосреднего сигналов датчиков положени€),позвол€ющихсущественно повысить точность »ѕ— »»”— засчет перехода от измерени€ средней кизмерениюмгновенной (квазимгновенной) скорости разгонаѕѕ.
6. –азработана нова€методологи€ структурного синтезаоптимальных »ѕ—, котора€ в отличие отизвестных подходов, основанных на синтезеструктур по одному из критериев (минимумаошибки обнаружени€ объекта датчиками илиминимума потери информации о параметрахсигнала датчиков в услови€х помех),обеспечивает одновременноедостижение указанных минимумов путемвведени€ в состав включенного на выходе датчиков фильтра, оптимального по критериюминимума ошибки обнаружени€ сигнала,дополнительного корректирующего звена,обеспечивающего минимум потери информациио параметрах сигнала датчиков. ѕри этомвпервые решена задачаструктурного синтезаоптимального фильтра каксоставной части »ѕ— попредложенному критерию Ђдвойногоминимумаї ивыведены соотношени€, доказывающиеэффективность объединени€ несколькихдатчиков положени€ в каждом канале регистрации–– дл€ уменьшени€ веро€тности ошибкиобнаружени€ сигналов датчиков в услови€хпомех.
7. ¬первые предложена комплексна€математическа€ модель системы ЂЁƒ” Ц »ѕ—ї сиспользованием модифицированной системыуравнений движени€ плазмы јрцимовича,модели электромагнитного пол€ движущегос€проводника с током, модели »ƒ синтегратором на выходе, набора моделей алгоритмовопределени€ скорости движени€ ѕѕ,позвол€юща€ проводить вычислительныеэксперименты по исследованию точностиразличных алгоритмов измерительногопреобразовани€ скорости движени€ ѕѕ в Ёƒ”, чтопозволило выбрать оптимальный вариантструктуры нейросетевой реализации »ѕ—,обеспечивающий минимальную методическуюпогрешность измерительногопреобразовани€ мгновенной скорости ѕѕ.
8. ¬первые предложеналгоритм параметрического синтеза –– (–» ), обеспечивающий минимизациюсуммарной погрешности измерени€ скорости,основанный на сочетании off-line-планировани€ дл€ расчета иформировани€ первого интервала пути иon-line-планировани€ дл€расчета иформировани€ каждого последующегоинтервала пути между парами датчиков в –– или точкамиопроса в –» , что позвол€ет формироватьоптимальный переменный шаг опроса в –» с учетомрезультатов измерени€ времени прохождени€ѕѕ предыдущего интервала.
ѕрактическа€ ценностьи реализаци€ результатов работы:
1. –азработаны основыпроектировани€ оптимальных измерительныхпреобразователей средней,квазимгновенной и мгновенной скорости дл€»»”— Ёƒ”, в том числе:
- получен комплексрасчетных формул дл€ оценкиметрологических параметров двухвариантовреализации врем€пролетного методаизмерени€ средней и квазимгновеннойскорости при равноускоренном движении (при заданнойбазе или заданном временном интервале) иразработана инженерна€ методика выбораварианта врем€пролетного метода,основанна€ на параметрическом синтезеэлементов »ѕ— по критерию минимумаметодической погрешности;
- разработанаинженерна€ методика графо-аналитическогорасчета минимально допустимого числадатчиков в –– (точек опроса в –» ) приизмерении, соответственно, средней иквазимгновенной скорости по заданнойпогрешности интерпол€ции;
- разработананомограмма в виде семейства графическихзависимостей, св€зывающих динамическуюпогрешность »¬» »ѕ— с рабочим диапазономскоростей »ѕ— и конструктивными параметрами –– ;
- разработанаинженерна€ методика параметрическогосинтеза –– »ѕ—, позвол€юща€, задава€сьдопустимой веро€тностью ошибкиобнаружени€ и порогомчувствительности регистратора сигналов сдатчиков, определ€ть оптимальныеконструктивные параметры –– (числодатчиков изначени€ интервалов между ними);
- разработанаинженерна€ методика структурного синтеза–– »ѕ— по критерию минимальнойверо€тности ошибки обнаружени€ сигналовдатчиков, основанна€ на интерактивнойпроцедурепоочередного перехода от одного кдругому варианту объединени€ датчиков,обеспечивающей выбор оптимальнойструктуры –– .
2. Ќа основаниипредложенной комплексной математическоймодели системы ЂЁƒ”-»ѕ—ї разработан изарегистрирован в ќтраслевом фондеалгоритмов и программ программныйкомплекс MMVSдл€проведени€исследовани€ законов движени€ ѕѕ в Ёƒ” иразличных алгоритмов измерительногопреобразовани€ средней, квазимгновенной имгновенной скорости с оценкой ихметрологических характеристик методом вычислительногоэксперимента, что позвол€ет на стадиипроектировани€ »»”— Ёƒ” обойтись без дорогосто€щих натурныхэкспериментов на уникальных Ёƒ”.
3. –азработана изарегистрирована в ќтраслевом фондеалгоритмов и программ компьютерна€программа FuzzyRAV,позвол€юща€ в интерактивном режиме решатьзадачи рангового анализа вариантов (методов)измерительного преобразовани€ средней,квазимгновенной и мгновенной скоростибез ограничений на количество критериев исравниваемых вариантов.
4. ѕроведенаапробаци€ в смежной областиэлектротехники разработанного методакоординатной функции дл€ контрол€параметров движени€ контактоввысоковольтных коммутационных аппаратов (в томчисле мгновенной скорости), подтвердивша€его эффективность, универсальность иперспективность при измерени€х в широкомдиапазоне скоростей.
5. –азработаныструктурные и функциональные схемы р€да»ѕ—, реализующие предложенные в работеметоды измерительного преобразовани€средней, квазимгновенной и мгновеннойскорости ѕѕв Ёƒ”.
6. Ќа основевыполненных исследований:
- разработано ивнедрено дл€ предпри€тий различныхотраслей (ЋЌѕќ Ђ—оюзї, г. ƒзержинский ћосковскойобл.; ÷Ќ»»ћаш, г. оролев ћосковской обл.)7 типов и модификаций »ѕ— и »»”—магнитоплазменных Ёƒ” (ѕ–-»ƒ, ѕ–-–», ѕ—-–Ѕ’-1,ѕ—-–Ѕ’-2, »»”— Ђѕ–ќЋќ√ї, »»”— Ђћолни€ї, »»”—Ђ»скраї), часть изкоторых включена в ќтраслевой каталог продукции;
- разработано ивнедрено в смежной области электротехникидл€ р€да энергетических предпри€тий Ћитвы и –‘(ќјќ Ђ–остовэнергої, ќјќ Ђ убаньэнергої,ќјќ ЂЌижновэнергої, ќјќ Ђ омиэнергої и др.) 18комплектов регистраторов параметровдвижени€ контактов высоковольтных выключателей(Ђћј–—-1ї), использующих предложенный вработе Ђметод координатной функцииї дл€измерени€мгновенной скорости;
- материалыдиссертационной работы используютс€ вучебном процессе ё–√“” (Ќѕ») в видеразделов курсов лекций Ђ»змерительныеинформационные системыї, при выполнениидипломныхпроектов по направлению 200100 Ђѕриборостроениеї.
Ќовизна и практическа€ценность результатов диссертационныхисследований подтверждена полученнымиавторскими свидетельствами ———– ипатентами –‘, программами Ё¬ћ,зарегистрированными в отраслевых фондахалгоритмов и программ (всего 25 охранныхдокументов).
јпробаци€работы. –езультатыработы докладывались и обсуждались на:1-й межотраслевой научно-техническойконференции по электродинамическимускорител€м (г. ƒзержинский ћосковской обл., 1988 г.);«ональном научно-техническом семинареЂћетоды и средства измерени€ механических параметровв системах контрол€ и управлени€Ф (г.ѕенза, 1991г.); ¬сесоюзной научной конференции Ућетоды исредства измерени€ механическихпараметров в системах контрол€ иуправлени€Ф (г. ѕенза, 1992г.); 1-й¬сероссийской научно-техническойконференции –оссийской метрологическойакадемии У—осто€ние и проблемытехнических измеренийФ (г. ћосква, ћ√“”им. Ѕаумана,1994г.); XIV, XV, XVI сесси€х семинара –јЌ Ђ ибернетикаэлектрических системї по тематикеЂƒиагностика электрооборудовани€ї (г.Ќовочеркасск, 1992г., 1994г., 1996г.); IV ¬сероссийскойнаучно-технической конференции Ђћетоды исредства измерений физических величинї(Ќижний Ќовгород, 1999г.); ћеждународнойнаучно-технической конференции У онтроль,измерени€,информатизаци€Ф (г. Ѕарнаул, 2000г.);ћеждународной научно - практическойконференции Ђ“еори€, методы и средстваизмерений, контрол€ и диагностикиї (г.Ќовочеркасск, 2000г.); ћеждународных научныхконференци€х Ђћатематические методы в технике итехнологи€хї (г. —анкт-ѕетербург, 2000; г.“амбов, 2002 г.; г. острома, 2004 г.); ћеждународнойнаучно - практической конференции Ђ—овременные энергетические системы и комплексы и управление имиї (г. Ќовочеркасск,2001г.); II-йћеждународной научно - практической конференцииЂ“еори€, методы и средства измерений,контрол€ и диагностикиї (г. Ќовочеркасск, 2001г.); 4-йћеждународной научно-техническойконференции ЂЌовые технологии управлени€движением технических объектовї (г.–остов-на-ƒону, 2001 г.); ћеждународной научно-техническойконференции Ђ»нтеллектуальные системы - IEEE AISТ03ї (п. ƒивноморское, 2003 г.); ћеждународной научно-техническойконференции Ђ»нтеллектуальные —јѕ–ї (п.ƒивноморское, 2003 г., 2004 г.);ћеждународнойнаучно-технической конференцииЂ»нтеллектуальные системы - IEEE AISТ04ї (п. ƒивноморское, 2004 г.);ежегодных научно-техническихконференци€х профессорско-преподавательского состава,научных работников, аспирантов и студентовё–√“” (Ќѕ») (г. Ќовочеркасск, 2006 г., 2007г., 2008 г.).
ѕубликации по темедиссертации. ѕорезультатам исследований опубликовано93 печатных работы, в том числе 1 монографи€ и67 научных публикаций (из них 31стать€ вжурналах, рекомендованных ¬ј дл€ публикациирезультатов докторских диссертаций), получено 23 авторских свидетельства ———– ипатента –‘,2 свидетельства о регистрациипрограмм дл€ Ё¬ћ в ќтраслевыхфондахалгоритмов и программ.
—труктура и объемработы. ƒиссертационна€работа состоит из введени€, п€ти глав,заключени€ иприложений. ќна содержит 351 стр. основноготекста, 100 рисунков, 9 таблиц, списоклитературыиз 235 наименований и 22 приложени€.
Ћичный вкладавтора заключаетс€ в том, что имсформулирован ирешен комплексвзаимно-обусловленныхзадач, обеспечивающих практическую реализацию концепции управл€емогоразгона вмагнитоплазменныхэлектродинамических ускорител€х, вчастности, предложил иисследовалпростойи точный алгоритм управлени€ разгоном наоснове Ђпрерывистогоїизмерени€ мгновеннойскорости плазмы на участках квазиравномерногодвижени€ и обосновалтребовани€ к соотношениюточности ибыстродействи€ »ѕ— как основного элемента »»”— Ёƒ”; разработал иисследовал новые методы измерительного преобразовани€ скорости повышенной точности; разработал комплекснуюматематическую модель системыЂЁƒ”-»ѕ—ї дл€сравнительного анализа по точностипредложенных методов измерительногопреобразовани€ скорости;создал основы методологиипараметрического и структурногосинтезапомехоустойчивых высокоточных »ѕ— дл€ »»”—Ёƒ”, в том числе с применением методовискусственного интеллекта; прин€лучастие в практической реализации »»”—Ёƒ”, обеспечилразработку, изготовление и передачу вопытно-промышленную эксплуатацию программно-технических средствизмерительного преобразовани€ параметровдвижени€ дл€ »»”— Ёƒ”.
ќ—Ќќ¬Ќќ≈ —ќƒ≈–∆јЌ»≈ƒ»——≈–“ј÷»»
—писоксокращений
¬” Ц вычислительноеустройство; »¬» Ц измеритель временных интервалов;»ƒ Циндукционный датчик положени€; »» Ц искусственныйинтеллект; »»Ё Ц импульсный источник энергии; »»”—Цинформационно-измерительна€ и управл€юща€система; »Ќ— Ц искусственна€ нейронна€ сеть; »ѕ—- измерительный преобразователь скорости; ‘ Цкоординатна€ функци€; ‘ DL-типа Ц координатна€функци€ дифференциально-логометрическоготипа; ‘ LDL-типа Цкоординатна€ функци€разностно-логометрического типа; ‘ DSL-типа Ц координатна€функци€ дифференциально-суммарно-логометрического типа; ‘ L- типаЦкоординатна€ функци€ логометрическоготипа; ‘ LL-типа Цкоординатна€ функци€логарифмо-логометрического типа; ћ ‘Ц методкоординатной функции; ѕќ Ц пусковой орган;ѕѕ Цплазменный поршень; –» Ц распределенныйизмерительный контур; – - рельсовый канал;–– Цраспределенный регистрирующий контур; —ј”Цподсистемаавтоматического управлени€; —Ќѕ Ц системы нечеткихправил; —ѕѕ Ц системы продукционных правил; ”ѕЦ ускорительпредварительный; ”” Ц устройствоуправлени€; Ў Ц шунтирующий ключ ; Ёƒ”Цэлектродинамический ускоритель.
¬о введении обоснована актуальность проблемы,определены цель и задачиисследовани€, изложены основныеположени€, выносимые на защиту, даны сведени€ оструктуре работы,апробациии реализацииполученных результатов,кратко рассмотреносодержание основных разделов.
¬ первой главе Ђјнализтребований к »ѕ— дл€ »»”— ипостановка задач исследовани€ї описан принцип магнитоплазменногоЁƒ” с управл€емым разгоном как объекта управлени€ (рис. 1), состо€щего из »»Ё,”ѕ, – сдвижущимс€ ѕѕ и толкаемым им телом.
Ёƒ” снабжено »»”— с—ј”, содержащей Ў , »ѕ—, ¬”, ”” с каналомуправлени€ – и каналом управлени€ коммутаторами»»Ё. ”правление разгоном ѕѕ в Ёƒ”заключаетс€ в ограничении его скорости назаданном уровне за счет прерывани€ вопределенный момент процесса передачиэнергии от»»Ё к – путем шунтировани€ входарельсотрона с помощью Ў , срабатывающегопо сигналу””. ћомент tкш выдачикоманды на шунтирование – €вл€етс€параметром управлени€, который в общем случае рассчитываетс€ в ¬” в режиме on-line. ƒомомента достижени€ разгон€емым сускорением aтелом заданного значени€ скорости можно выделить достаточно малыйинтервал времени, когда движение мало отличаетс€ от равноускоренного. »менновнутри этого интервала времениследует выполнить всенеобходимыеизмерени€ и вычислени€ дл€ определени€момента tкш. Ѕудемназывать этот интервал критическим, амомент времени его начала Ц критическиммоментом tкр. “аким образом, закондвижени€от момента tкр начала критическогоинтервала времени пренебрежимо малоотличаетс€ от линей-

ной функции спосто€нным ускорением ![]() ,где vкр Ц скорость ѕѕ итела в момент tкр; a Цускорение. ѕроанализированыдва алгоритма управлени€ разгоном с формированием команды на прекращение подводаэнергии к рельсотрону Ёƒ” в определенныймомент времени: 1-й алгоритм - с расчетом скорости и ускорени€,начина€ с момента tкр,и 2-й алгоритм Ц сизмерением скорости в процессе разгона ѕѕ ификсацией момента достижени€ определенногозначени€ скорости vкш сдопущением, что на последнем (критическом)интервале времени ѕѕ (тело) движутс€ сноминальнымускорением.ћоментtкш подачи командыот ”” на включение Ў нерассчитываетс€ заранее, как в 1-м алгоритме, а совпадаетс моментом достижени€ ѕѕ(телом) значени€ скоростиvкш, когда выдаетс€ команда нашунтирование – . ѕри реализации 2-го алгоритма ¬”исключаетс€ из схемы.
,где vкр Ц скорость ѕѕ итела в момент tкр; a Цускорение. ѕроанализированыдва алгоритма управлени€ разгоном с формированием команды на прекращение подводаэнергии к рельсотрону Ёƒ” в определенныймомент времени: 1-й алгоритм - с расчетом скорости и ускорени€,начина€ с момента tкр,и 2-й алгоритм Ц сизмерением скорости в процессе разгона ѕѕ ификсацией момента достижени€ определенногозначени€ скорости vкш сдопущением, что на последнем (критическом)интервале времени ѕѕ (тело) движутс€ сноминальнымускорением.ћоментtкш подачи командыот ”” на включение Ў нерассчитываетс€ заранее, как в 1-м алгоритме, а совпадаетс моментом достижени€ ѕѕ(телом) значени€ скоростиvкш, когда выдаетс€ команда нашунтирование – . ѕри реализации 2-го алгоритма ¬”исключаетс€ из схемы.
ѕолучены выражени€,св€зывающие допустимую погрешность »ѕ—v и заданную погрешность управлени€ разгоном Vз дл€ обоих алгоритмов управлени€:
дл€ 1-гоалгоритма управлени€
 , (1)
, (1)
дл€ 2-гоалгоритма управлени€
 , (2)
, (2)
где  ,
,![]() и
и ![]() -моменты времени,определ€ющие начало и конец интервалаизмерительного дифференцировани€ дл€ оценкиускорени€ a; шк Ц врем€ задержкисрабатывани€ Ў ; шкЦ относительноеотклонение шк отноминального значени€;
-моменты времени,определ€ющие начало и конец интервалаизмерительного дифференцировани€ дл€ оценкиускорени€ a; шк Ц врем€ задержкисрабатывани€ Ў ; шкЦ относительноеотклонение шк отноминального значени€; ![]() -относительна€ погрешность отклонени€ускорени€ от номинального значени€
-относительна€ погрешность отклонени€ускорени€ от номинального значени€
Ќа рис. 2 приведеныпостроенные по (1) и (2) поверхности, изкоторых видно очевидное преимущество 2-гоалгоритма управлени€, так как онпредъ€вл€ет значительно меньшие требовани€ к точности »ѕ—.¬ыбира€ предельноезначениепогрешности управлени€разгоном Vз =![]() 3,0%, получаем из графиков дл€ 1-го алгоритмадопустимую погрешность »ѕ— v= 0,6 %, что практически нереализуемо, а дл€2-го алгоритма требовани€ к точности »ѕ—более чем в 4 раза ниже: v= 2,8 %.ѕоэтому вкачестве основного алгоритма управлени€ разгоном Ёƒ”выбран 2-й алгоритм управле-
3,0%, получаем из графиков дл€ 1-го алгоритмадопустимую погрешность »ѕ— v= 0,6 %, что практически нереализуемо, а дл€2-го алгоритма требовани€ к точности »ѕ—более чем в 4 раза ниже: v= 2,8 %.ѕоэтому вкачестве основного алгоритма управлени€ разгоном Ёƒ”выбран 2-й алгоритм управле-
ни€. ¬то же врем€ показано, что достижение такойточности »ѕ— невозможно при измерениисреднейскорости и требует измерени€ или квазимгновенной(средней на существенно малом интервале),или мгновенной скорости.
ƒл€ оценкидинамической погрешности »ѕ—,определ€емой задержкой, вносимой вуправлени嬔 подсистемы управлени€ »»”— впроцессе расчета каждого значени€мгновенной скорости,исследован методом вычислительногоэксперимента закон движени€ плазмыв Ёƒ” с емкостным накопителемэнергии. ѕри построении математическоймодели движени€ системы Ђѕѕ-разгон€емоетелої использованабазова€ система дифференциальныхуравнений јрцимовича, описывающа€закон движени€ плазмы в каналепитающегос€ от конденсаторной батареирельсотрона Ёƒ”. ƒл€ перехода от базовой модели движени€ плазмы кмодели движущейс€ системы Ђѕѕ-разгон€емое телої учтена


а)б)
суммарна€ масса ѕѕ и тела. —лучайный характер колебанийширины ѕѕ учитывалс€ представлением ее в видесуммы ![]() , где
, где  - детерминированный процесс,полученный в результате решени€ базовой системыуравнений јрцимовича;
- детерминированный процесс,полученный в результате решени€ базовой системыуравнений јрцимовича; ![]() - случайныйпроцесс с нормальным закономраспределени€. ƒл€ моделировани€ эффектов,св€занных с неустойчивостьюсосто€ни€ свободной плазмы,использовалс€ генератор псевдослучайныхчисел, распределенных по нормальному закону сматематическим ожиданием
- случайныйпроцесс с нормальным закономраспределени€. ƒл€ моделировани€ эффектов,св€занных с неустойчивостьюсосто€ни€ свободной плазмы,использовалс€ генератор псевдослучайныхчисел, распределенных по нормальному закону сматематическим ожиданием ![]() ис.к.о.
ис.к.о. ![]() м. Ќачальна€ ширина ѕѕ h0 =0,05 м, его начальна€ скорость
м. Ќачальна€ ширина ѕѕ h0 =0,05 м, его начальна€ скорость  м/с. —уммарна€масса ѕѕ и телапринималасьравной 2 г.
м/с. —уммарна€масса ѕѕ и телапринималасьравной 2 г.
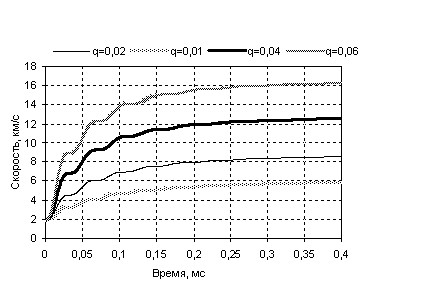
Ќа рис. 3 приведеныполученные на мо-делизависимости скорости движени€ системыЂѕѕ-разгон€емое телої от временипри выбранных типовыхпараметрахрельсотрона, ѕѕ и тела дл€различных значений энер-гетическогопараметра q в диапазоне от 0,01 до 0,06,определ€емого отношением характерной величины силмагнитного давлени€ к харак-терной величинесилы инерции ускор€€емой в Ёƒ” плазмы.
“ак как сростом скорости увеличи-ваетс€ погрешность![]() и уменьшаетс€ допу-стимое врем€
и уменьшаетс€ допу-стимое врем€ ![]() и времени
и времени ![]() около 12,5 км/с.
около 12,5 км/с.
ак следует изрис. 3, при питании Ёƒ” от емкостного источникаэнергии между участками нулевогоускорени€ располагаютс€ участкиразгона, закон которыхблизок кравноускоренному. “аким образом, вцелом закон разгона в этомслучае можно назватьблизким к прерывисто-равноускоренному. јнализ результатовмоделировани€ позволилпредложить путь уменьшени€погрешности![]() (и, соответственно, увеличени€
(и, соответственно, увеличени€
ѕредложены два путирешени€ проблемы увеличени€  при сохранении приемлемыхзна-чений
при сохранении приемлемыхзна-чений ![]() . ѕервый путьпредполагает смещение во времени началаизмерений, исключив первыенес-
. ѕервый путьпредполагает смещение во времени началаизмерений, исключив первыенес-
колько участковнулевого ускорени€, на которых  <1 мкс. ¬торой путь св€зан с выполнениемизмерени€ скорости не научастках нулевого ускорени€, а в зонахмалых ускорений, что, хот€ и несколькоувеличивает
<1 мкс. ¬торой путь св€зан с выполнениемизмерени€ скорости не научастках нулевого ускорени€, а в зонахмалых ускорений, что, хот€ и несколькоувеличивает ![]() , но приводит к увеличению длительностиэтих зон, а значит, и значени€
, но приводит к увеличению длительностиэтих зон, а значит, и значени€ ![]() .–асчеты на моделипоказали, что при переходек вычислению скорости по заданномууровню ускорени€ в зоне малых ускоренийудаетс€ получить приемлемые сочетани€значений
.–асчеты на моделипоказали, что при переходек вычислению скорости по заданномууровню ускорени€ в зоне малых ускоренийудаетс€ получить приемлемые сочетани€значений![]() и
и ![]() .
.
ƒл€ вычислени€ скорости в несколькихзонах малых ускорений в течение разгона (нарис. 3 видно, что таких зон - восемь)исследованы различные алгоритмы функционировани€ ѕќ, форми рующего пороговый уровеньзаданного малого значени€ ускорени€ идающего команду в »ѕ— на передачу в каналуправлени€ Ёƒ” очередного значени€скорости, начало расчета которогосовпадает сначалом очередной зоны малых ускорений,ограниченной этим пороговым уровнем икривой ускорени€. ќбоснован выбор следующегоалгоритма функционировани€ ѕќ:непрерывное измерение электрического тока вѕѕ, а в момент перехода токачерез нуль - формированиевыходного сигнала, €вл€ющегос€ командой дл€ »ѕ— наначало вычислени€ с последующей передачей вканал управлени€ Ёƒ” очередного значени€скорости. ƒл€ реализации алгоритма требуетс€введение в подсистему управлени€»»”— измерительного преобразовател€электрического тока (»ѕ“). ”становлено, чтозначени€ ![]() растут припереходе от 1-го к 8-му участку (1,6; 2,6; 3,3; 5,9; 9,0;13,3; 18,8 и 33,5 мкс).
растут припереходе от 1-го к 8-му участку (1,6; 2,6; 3,3; 5,9; 9,0;13,3; 18,8 и 33,5 мкс).
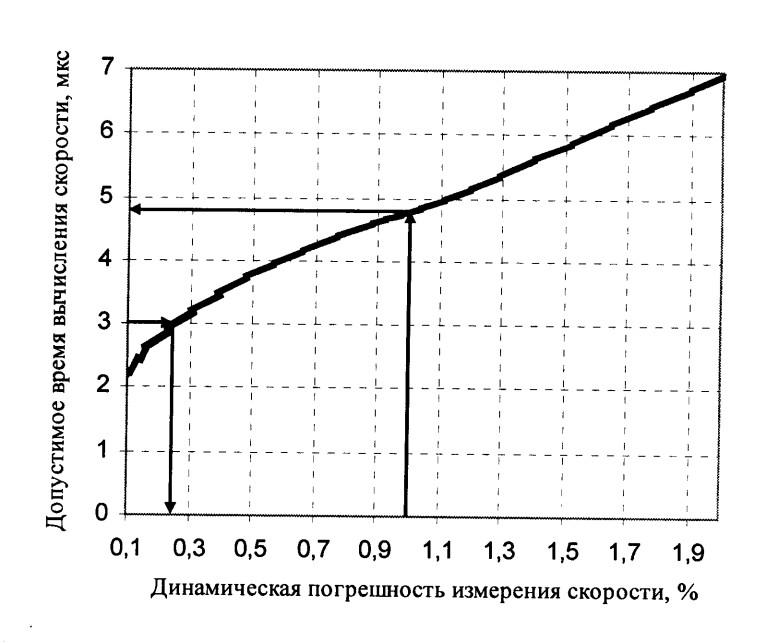
ѕриведенна€ нарис. 4 зависимость ![]() =f (
=f (![]() ) дл€ 2-гоучастка нулевого ускорени€показывает, что, пропуска€ 1-й участок иначина€ измерение скорости со 2-гоучастка (задержива€на-чало измерений на tз = 33мкс на интервале времени разгона 400 мкс),можно при заданной динами-ческойпогрешности
) дл€ 2-гоучастка нулевого ускорени€показывает, что, пропуска€ 1-й участок иначина€ измерение скорости со 2-гоучастка (задержива€на-чало измерений на tз = 33мкс на интервале времени разгона 400 мкс),можно при заданной динами-ческойпогрешности ![]() 1,0% увеличить
1,0% увеличить ![]() почтив 1,5 раза (с 3,4 мкс до 4,8 мкс) или,наоборот, задава€сь
почтив 1,5 раза (с 3,4 мкс до 4,8 мкс) или,наоборот, задава€сь ![]() = 3мкс, снизить динамическую погрешность с
= 3мкс, снизить динамическую погрешность с ![]() 0,25 %.
0,25 %.
—ледует учесть, чтов интервал ![]() = 3мкс входит задержка на срабатываниеЎ шк = 2 мкс.
= 3мкс входит задержка на срабатываниеЎ шк = 2 мкс.
¬ результате навычисление значени€ скорости остаетс€ 1 мкс. ƒл€увеличени€ этого времени доприемлемогозначени€ 3 мкс следует до началаизмерени€(дл€ канала управлени€) пропуститьпервые триучастка нулевого ускорени€. ѕри этом длительность 4-го участканулевого ускорени€ 5,9 мкс оказываетс€достаточной дл€ снижени€ динамическойпогрешности до ![]() 0,25% сучетом суммарной задержки
0,25% сучетом суммарной задержки ![]() = 3мкс и шк = 2 мкс. ƒл€ оценкитребований »»”— Ёƒ” к допустимой статическойпогрешности »ѕ—
= 3мкс и шк = 2 мкс. ƒл€ оценкитребований »»”— Ёƒ” к допустимой статическойпогрешности »ѕ—  , котора€ вместе с динамическойпогрешностью
, котора€ вместе с динамическойпогрешностью ![]() определ€етсуммарнуюпогрешность »ѕ—, используемгеометрическое сложениенекоррелированных составл€ющих погрешности:
определ€етсуммарнуюпогрешность »ѕ—, используемгеометрическое сложениенекоррелированных составл€ющих погрешности: ![]() =
=  =
= ![]()
![]()
![]() 2,8%.
2,8%.
ѕроведены обзор иклассификаци€ методов измерени€ скоростиѕѕ в Ёƒ” и показано, чтонаиболее приемлемыми дл€ данной задачи€вл€ютс€ врем€пролетный и доплеровскиеметоды измерени€ скорости. —использованием теорииоптимальных методов приема прифлуктуационных помехах выполнен сравнительныйанализ врем€пролетного и доплеровскогометодов измерени€ попомехозащищенности.ƒоказано, что  <
<  ,где
,где ![]() и
и  - веро€тность ошибки измерени€ интервалавремени
- веро€тность ошибки измерени€ интервалавремени ![]() при использовании врем€пролетногометода и веро€тность ошибкиизмерени€частоты при использованиидоплеровского метода, соответственно, т.е. посравнению с доплеровским врем€пролетныйметод измерени€ скорости €вл€етс€ болеепомехозащищенным ипринимаетс€ в качестве основногометода дл€ дальнейших исследований исинтеза»ѕ—.
при использовании врем€пролетногометода и веро€тность ошибкиизмерени€частоты при использованиидоплеровского метода, соответственно, т.е. посравнению с доплеровским врем€пролетныйметод измерени€ скорости €вл€етс€ болеепомехозащищенным ипринимаетс€ в качестве основногометода дл€ дальнейших исследований исинтеза»ѕ—.
¬о второй главе Ђћатематическое моделированиесистемы Ђрельсотрон-датчики положени€ї проведен сравнительный анализчисленных и аналитических методоврасчетаЁƒ— навыходе »ƒ отпол€, создаваемого движущимс€ ѕѕ с током,показавший, что предложенные Cook R.W. упрощенные аналитическиемодели Ђось с токомї и Ђполоса с токомї посравнению с объемной моделью ѕѕ стоком даютбольшую погрешность идентификацииположени€ хѕѕ длинойх0 в канале Ёƒ” (х = 1,5 х0 и 0,5 х0,соответственно), заниженные в 6 раз и завышенные в 2раза значени€ Ёƒ— на выходе датчика(рис. 5). ”становлено, чтодл€ расчетаэлектромагнитного пол€ от движущегос€ проводника простогосечени€ (квадрат, пр€моугольник) может бытьиспользована объемна€ модельс интегрированием по тремкоординатам, а дл€ проводника сложногосечени€ (трапеци€ и т.д.) Ц более проста€, ноточна€ (расхождение менее 1,0%) модель с интегрированиемпо боковой поверхности проводника.
¬ычислительнымэкспериментом установлено, что сцелью уменьшени€ погрешности расчета и измерени€Ёƒ— в услови€х электромагнитных помехцелесообразно уменьшение диаметра катушки »ƒ донескольких мм, что требует увеличени€числа витков до нескольких сотен.¬озникающую при малом сечениикатушки проблему точности идентификации положени€ ѕѕв нерасчетных режимах Ёƒ”(по€вление плазменных перемычек-Ђлидеровї впереди основного €дра ѕѕ) рекомен-

довано решатьне параметрическим, азапатенто-ванным структурно-схемным способом(объединением »ƒ в –– по схемемаксиселектора). ѕоказано,что погрешность измерени€ Ёƒ— »ƒ из-законечной длины катушки возрастает в 5раз при приближении ѕѕ к месту установки »ƒ,а при уменьшении длины ка-тушки»ƒ на пор€док погрешностьизмерени€ Ёƒ— снижаетс€ в 2 раза и при длинекатушки 5,0 мм уменьшаетс€ до  5,0 %. ƒальнейшее снижение погрешности (до
5,0 %. ƒальнейшее снижение погрешности (до ![]() 1,0 %и менее) требует разработкиспециальных алгоритмов обработки сигналовсоседних»ƒ с использованием метода компенсации. Ќаоснова-нии этого сделан выводо том, чтоперспективны ме-тоды измерительного преобразовани€мгновенной ско-рости, при которыхинформаци€ о положении ѕѕ снимаетс€ при егонахождении не над каждым »ƒ, как приизмерении средней скоростиврем€пролетным методом, а на интервалемежду соседними »ƒ.
1,0 %и менее) требует разработкиспециальных алгоритмов обработки сигналовсоседних»ƒ с использованием метода компенсации. Ќаоснова-нии этого сделан выводо том, чтоперспективны ме-тоды измерительного преобразовани€мгновенной ско-рости, при которыхинформаци€ о положении ѕѕ снимаетс€ при егонахождении не над каждым »ƒ, как приизмерении средней скоростиврем€пролетным методом, а на интервалемежду соседними »ƒ.
»сследовано вли€ниерассто€ни€ между рельсами Ёƒ” на Ёƒ— »ƒ и показано,что вли€нием вариации этого рассто€ни€ наЁƒ— »ƒ можнопренебречь (при вариациирассто€ни€ между рельсами ![]() 1,0 %).
1,0 %).
”становлено сильноевли€ние на Ёƒ— »ƒ рассто€ни€ между ос€мирельсотрона и »ƒ в –– . ѕоказано, чтопри расположении оси катушки »ƒ нарассто€нии менее 3 см от осирельсотрона смещение осей на 1-2 ммвлечет изменение Ёƒ— более чем на 30%, а приувеличении этого рассто€ни€ до 4 см и болеепогрешность из-за смещени€ осей вэтих же пределах резко уменьшаетс€ и придостижении 8 см становитс€ менее![]() 1,0%.
1,0%.
¬соответствии с этим рекомендованоустанавливать »ƒ относительно осирельсотрона на рассто€нии 8 см. ƒальнейшее удаление »ƒ от осирельсотрона нецелесообразно из-зауменьшени€ Ёƒ— и ухудшени€помехоустойчивости »ѕ—. ƒл€снижени€ до пренебрежимо малого вли€ни€ наЁƒ— »ƒизмен€ющейс€ длины ѕѕ рекомендовановыбирать его размеры, приближающимис€ кразмерамидеального (точечного) »ƒ: показано, чтодлина катушки »ƒ должна быть значительноменьшерассто€ни€ между датчиками и, какминимум, на пор€док меньше длины ѕѕ.

ѕри реальныхзначени€х длины ѕѕ длину катушки »ƒследует выбирать не более 0,5 см. “огда при выборерассто€ни€ между датчи-ками –– более 10 смпогрешностью вли€ни€ длины ѕѕ можно пренебречь. ¬св€зи с этим перспективна разработкановых ме-тодов измерительного преобразовани€ ско-рости, допускающихрассто€ние между датчиками в –– много больше 10 см.
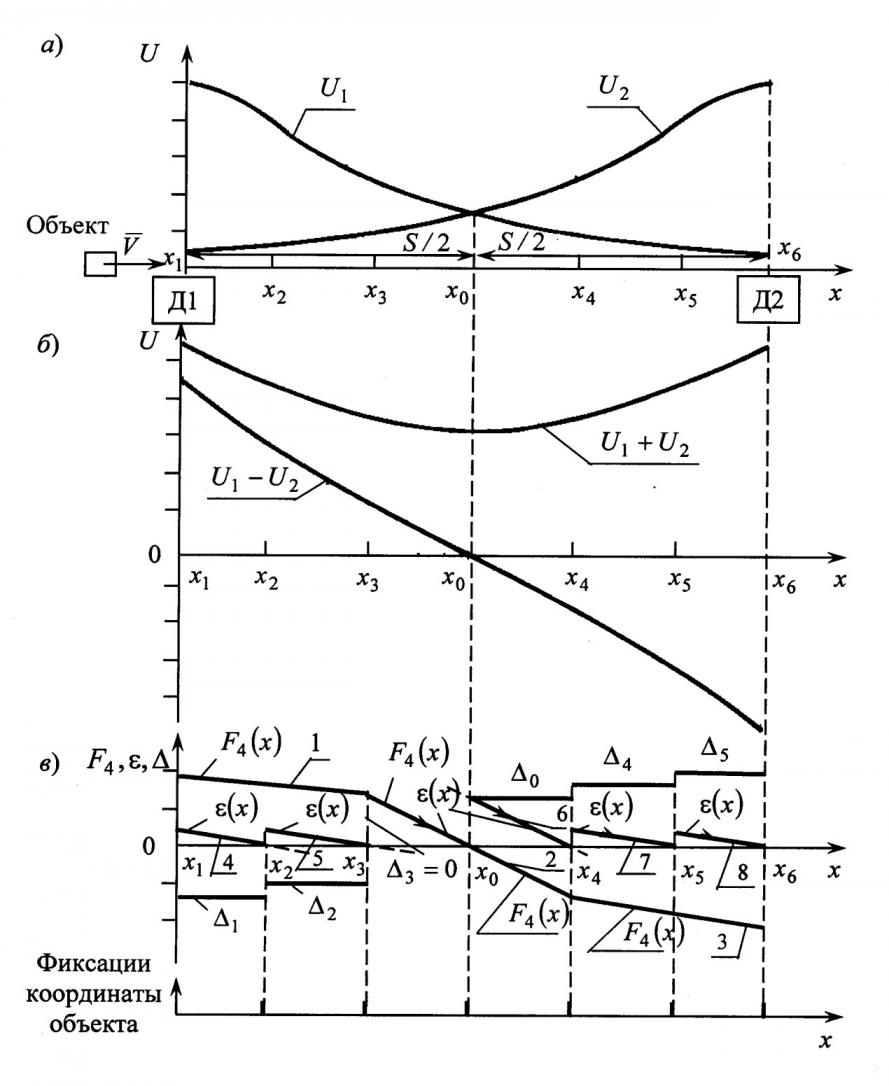
ћоделирование выходных сигналов пар »ƒв –– при прохождениимежду ними ѕѕ показалохарактер зависимости этих сигналовот положени€ ѕѕ и между собой (рис. 6)и вы€вило необходимостьисследовани€возможности одновременного использовани€ информации об Ёƒ— пар соседних »ƒдл€ перехода от регистрациимомента прохождени€ ѕѕнад »ƒк определению положени€ и скорости ѕѕ в каждойточке траектории между »ƒ.
¬ третьей главе Ђћетрологический анализврем€пролетного метода измерени€ среднейскоростиїпроведенаклассификаци€ погрешностейврем€пролетного метода измерени€скорости и исследованысоставл€ющиеинструментальной погрешности измерени€ средней и мгновеннойскорости. — использованиемрезультатов компьютерного моделировани€ Ёƒ— »ƒ в процессе разгона ѕѕ в Ёƒ” изучены составл€ющие инструментальной погрешности измерени€скорости иполучены предельные ее оценки приизмерении средней (![]() 5,2 %)и мгновенной (
5,2 %)и мгновенной (![]() 1,7 %) скорости. “рехкратное снижениеинструментальной погрешности приизмерении мгновеннойскорости по сравнению с измерениемсредней скорости возможно привыполнении рекомендаций поструктурному и параметрическомусинтезу »ѕ— и его элементов: решениезадачи параметрическогосинтеза установки базы и иной погрешности,имеющих противоположные знаки;разработка методов и структурныйсинтез »ѕ— с генерациеймножества бездатчиковых точек опроса иформированием существенно малыхотрезков пути (баз); разработканового метода измерительногопреобразовани€ и структурный синтез»ѕ—, допускающих увеличениерассто€ни€ между соседними »ƒ до 1,0 м.
1,7 %) скорости. “рехкратное снижениеинструментальной погрешности приизмерении мгновеннойскорости по сравнению с измерениемсредней скорости возможно привыполнении рекомендаций поструктурному и параметрическомусинтезу »ѕ— и его элементов: решениезадачи параметрическогосинтеза установки базы и иной погрешности,имеющих противоположные знаки;разработка методов и структурныйсинтез »ѕ— с генерациеймножества бездатчиковых точек опроса иформированием существенно малыхотрезков пути (баз); разработканового метода измерительногопреобразовани€ и структурный синтез»ѕ—, допускающих увеличениерассто€ни€ между соседними »ƒ до 1,0 м.
¬ыполнен анализ методической погрешности измерени€ скорости ѕѕ врем€пролетным методом приразличных законахдвижени€ (с изменением и без изменени€знака ускорени€).
¬ведено пон€тиеэквивалентного ускорени€ ![]() идоказана следующа€ теорема:
идоказана следующа€ теорема:
“еорема: ћетодическа€ погрешность ![]() , достигаетминимального значени€ при замене егоравноускоренным движением сэквивалентным ускорением
, достигаетминимального значени€ при замене егоравноускоренным движением сэквивалентным ускорением ![]() ,т.е.
,т.е. ![]() при
при![]() , где
, где  определ€етс€выражени€ми:
определ€етс€выражени€ми:  и
и  , соответ-ственно, дл€ случаев
, соответ-ственно, дл€ случаев  и
и  ;
;![]() - моментывремени, соответствующие началу иконцу интервалаизмерени€;
- моментывремени, соответствующие началу иконцу интервалаизмерени€; ![]() - интервал времени прохождени€ объектом заданной базы
- интервал времени прохождени€ объектом заданной базы  ;
;
![]() -значени€ скорости, соответственно, в начале и концеинтервала измерени€.
-значени€ скорости, соответственно, в начале и концеинтервала измерени€.
ќтсюда следует первыйвывод: задача повышени€ точности измерени€скорости объекта за счет снижени€методической ошибки может быть решенаавтоматическим разбиением траектории движени€ надостаточно малые отрезки (базы), в пределахкаждого из которых закон движени€ может считатьс€равноускоренным. ¬торойвывод: вкачестве оценки методической погрешностиизмерени€скорости объекта при любом законе егодвижени€ следует использовать еЄ значениепри равноускоренном движении сэквивалентным ускорением.
ѕредложенаметодологи€ выбора одного из двух способовреализации врем€пролетного метода (измерениеперемещени€ при заданномвременном интервале между отсчетами  или измерение временногоинтервала при заданной базе
или измерение временногоинтервала при заданной базе![]() между »ƒ), основанна€ напараметрическом синтезе элементов »ѕ— покритерию минимума методическойпогрешности при выборе значений варьируемыхпараметров (посто€нной базы илипосто€нного временного интервала), заданныхограничени€х на них и равноускоренномдвижении с эквивалентным ускорением.
между »ƒ), основанна€ напараметрическом синтезе элементов »ѕ— покритерию минимума методическойпогрешности при выборе значений варьируемыхпараметров (посто€нной базы илипосто€нного временного интервала), заданныхограничени€х на них и равноускоренномдвижении с эквивалентным ускорением.
ѕолучен сведенныйв табл. 1 комплекс расчетных формул дл€ определени€скоростных и временныхпараметров равноускоренного движени€ иметодической погрешностиизмерени€ скорости при двух вариантахреализации врем€пролетного метода.
ѕроведен расчетдисперсии методической погрешностиизмерени€ скорости врем€пролетным методом.ƒоказано, что при заданным интервале путидисперси€ на каждом интервале €вл€етс€функцией отномера траектории и среднего значени€скорости на интервале измерени€ и так же,как и абсолютна€ методическа€ погрешностьна интервале измерени€, резкопадает с ростом номера i-го участкатраектории: ![]() ,а при заданном интервале времени аб-солютна€методическа€ погрешность на интервалеизмерени€ и дисперси€ методическойпогрешности
,а при заданном интервале времени аб-солютна€методическа€ погрешность на интервалеизмерени€ и дисперси€ методическойпогрешности ![]() независ€т от номера временного интервала иот значени€ средней скорости и посто€нны на всемконтролируемом участке. –езультатыанализа показали, что при контролескорости в Ёƒ” с управл€емым разгоном, когда помере приближени€ к предельной (заданной) скорости раз-
независ€т от номера временного интервала иот значени€ средней скорости и посто€нны на всемконтролируемом участке. –езультатыанализа показали, что при контролескорости в Ёƒ” с управл€емым разгоном, когда помере приближени€ к предельной (заданной) скорости раз-
“аблица 1Ц омплекс расчетныхформул
| ѕараметр | ¬ариант реализацииврем€пролетного метода измерени€ | |
¬ариант первый:  | ¬ариант второй:  | |
| јбсолютна€методическа€ погрешность на интервале измерени€ | ||
| —уммарна€абсолютна€ методическа€ погрешность | ||
| ћгновенна€скорость в концеинтервала измерени€ | ||
| —редн€€ скорость на интервалеизмерени€ | ||
»нтервал временипрохождени€телом  -го) интервала -го) интервала | ||
| оордината телапри скорости | ||
¬рем€ с началадвижени€ до достижени€ скорости  и момента нулевого значени€ методической погрешности и момента нулевого значени€ методической погрешности | ||
| ¬рем€ с моментаначала движени€ до конца | ||
гона повышаютс€требовани€ к точности измерени€,предпочтителен вариант с заданным интервалом пути (![]() . ”становлено, что скорость
. ”становлено, что скорость![]() на базовомотрезке
на базовомотрезке ![]() , на которомускорение оказываетс€ равным
, на которомускорение оказываетс€ равным ![]() ,нельз€ считать достоверной, поскольку онаизмерена с методической погрешностью,превышающей допустимую.ѕоэтому дл€ точнойоценки скорости можно дополнительно измер€ть(рассчитывать) значени€ ускорени€, апри вторичной обработке полученной отдатчиков информации производить селекцию отсчетовускорени€ в заданных координатахтраектории, идентифициру€ Ђкритическиеї значени€ускорени€
,нельз€ считать достоверной, поскольку онаизмерена с методической погрешностью,превышающей допустимую.ѕоэтому дл€ точнойоценки скорости можно дополнительно измер€ть(рассчитывать) значени€ ускорени€, апри вторичной обработке полученной отдатчиков информации производить селекцию отсчетовускорени€ в заданных координатахтраектории, идентифициру€ Ђкритическиеї значени€ускорени€ ![]() , которымсоответствуют значени€ скорости,измеренные с максимальнойметодической погрешностью. ѕолученныев координатах, соответствующихЂкрити-
, которымсоответствуют значени€ скорости,измеренные с максимальнойметодической погрешностью. ѕолученныев координатах, соответствующихЂкрити-
ческомуїускорению![]() ,значени€ скорости должны рассматриватьс€как недостоверные. ƒл€ умень-шени€ погрешности интерпол€циидл€ Ёƒ” с неуправл€емым разгономпредложеналгоритмфункционировани€ »ѕ—,предусматривающий иден-
,значени€ скорости должны рассматриватьс€как недостоверные. ƒл€ умень-шени€ погрешности интерпол€циидл€ Ёƒ” с неуправл€емым разгономпредложеналгоритмфункционировани€ »ѕ—,предусматривающий иден-
тификацию и исключениенедостоверных значений
измер€емой среднейскорости.
— использованиеминформационного подхода
установленазависимость (рис. 7) между погрешно-
стью интерпол€ции![]() при измерении скорости врем€-
при измерении скорости врем€-
пролетным методом иколичеством датчиков N, вход€-
щихв –– :
rЦчисло Ђнедостающихї до оптимальногоколичества
»ƒ в –– ;  - шумова€погрешность;
- шумова€погрешность;
![]() - энерги€ шума (помех)и энерги€ информационного сигнала. —уд€ поотрицательному знакупогрешности, имеет местозанижение показаний »ѕ— относительноистинной скорости.
- энерги€ шума (помех)и энерги€ информационного сигнала. —уд€ поотрицательному знакупогрешности, имеет местозанижение показаний »ѕ— относительноистинной скорости.

ѕолучено выражениедл€ количества датчиков  в »ѕ— с –– (илиточек опроса в »ѕ— с –» ),
в »ѕ— с –– (илиточек опроса в »ѕ— с –» ),  ;
; ![]() - диапазон частотспектра сигнала и его длительность,соответственно;
- диапазон частотспектра сигнала и его длительность,соответственно; ![]() -коэффициент пропорциональности междуэффективным значением
-коэффициент пропорциональности междуэффективным значением ![]() длительности сигнала и его реальнымзначением
длительности сигнала и его реальнымзначением ![]() ;
; ![]() и
и![]() - минимальное имаксимальное значени€ скорости, соответственно. Ќаосновании полученных результатовпредложена инженерна€ методикаграфо-аналитического расчета минимальнодопустимого числа »ƒ в –– »ѕ— по заданнойпогрешности интерпол€ции.
- минимальное имаксимальное значени€ скорости, соответственно. Ќаосновании полученных результатовпредложена инженерна€ методикаграфо-аналитического расчета минимальнодопустимого числа »ƒ в –– »ѕ— по заданнойпогрешности интерпол€ции.
ѕоказанаперспективность разработки методовизмерени€ Ђквазимгновеннойї скорости путемразбиени€ особым образом интервала путимежду парой соседних Ђфизическихїдатчиков на множество существенно малых интерваловбез установки датчиков в новых точкахопроса, при этом ошибка интерпол€цииможет быть сведена допренебрежимо малого значени€.
ѕроведентеоретический анализ дина-мическойпогрешности »¬» при использо-вании врем€пролетного метода измерени€ско-рости ивыведены соотношени€дл€постро-ени€ номограммы (рис. 8) в виде семействазависимостей, св€зывающих этупогреш-ностьс рабочим диапазоном скоростей и кон-структивнымипараметрами –– .
”читыва€, чтоврем€, в течение которого ѕѕ изменилскорость от ![]() до
до  ,
,
равно![]() , где
, где  - длина контролируе-могоучастка;
- длина контролируе-могоучастка;  -средн€€ скорость движени€ ѕѕ на участке длиной
-средн€€ скорость движени€ ѕѕ на участке длиной ![]() , выражение дл€ динамической погрешности может быть представлено в следующем виде:
, выражение дл€ динамической погрешности может быть представлено в следующем виде:
 , где
, где  .
.
¬ы€влен р€дзакономерностей и выработанырекомендации по снижениюдинамической погрешности »¬» выборомсоотношений конструктивных параметров–– . ”становлено, что дл€ минимизации этойпогрешности необходимо обеспечитьнормализацию формы сигнала на выходекаждого »ƒ, приближа€ еЄ к форме гауссова(колоколообразного) сигнала, дл€ чего предложено включатьинтегратор на выходе »ƒ илииспользовать вместо »ƒ датчики ’олла.
ѕолучены выражени€дл€ инструментальной и методическойсоставл€ющих погрешности измерени€ скорости сучетомверо€тности ![]() ошибки обнаружени€ сигналов:
ошибки обнаружени€ сигналов:![]() ;
;  ;
;  ;
;  ;
;![]() =
=  , где
, где ![]() < 1 Ц коэффициенттехнического совершенства »¬»;
< 1 Ц коэффициенттехнического совершенства »¬»; ![]() - с.к.о.методической и инструментальнойпогрешностей;
- с.к.о.методической и инструментальнойпогрешностей; ![]() -абсолютное значениеметодической погрешности на i-м интервалетраектории;
-абсолютное значениеметодической погрешности на i-м интервалетраектории; ![]() - i- й интервал времени;
- i- й интервал времени; ![]() -текущее врем€ между формированиемсигналов соседних »ƒ;
-текущее врем€ между формированиемсигналов соседних »ƒ; ![]() абсолютна€инструментальна€ погрешность на i- м интервале;
абсолютна€инструментальна€ погрешность на i- м интервале;  - погрешность измерени€интервала пути
- погрешность измерени€интервала пути![]() ;
;  - веро€тность пропуска сигнала;
- веро€тность пропуска сигнала;![]() -веро€тность ложной тревоги; P(0) иP(1) Ц веро€тностинепо€влени€ и по€влени€ ѕѕ перед »ƒ,соответственно.
-веро€тность ложной тревоги; P(0) иP(1) Ц веро€тностинепо€влени€ и по€влени€ ѕѕ перед »ƒ,соответственно.
ѕолученные выражени€позвол€ют определ€ть характеристикиодних функциональных блоков »ѕ— череззаданные характеристики других блоков.Ќапример, задава€сь ![]() или
или  регистратора импульсов от »ƒ –– изначением с.к.о.
регистратора импульсов от »ƒ –– изначением с.к.о. ![]() вычислител€, можно получитьдопустимое значение с.к.о.
вычислител€, можно получитьдопустимое значение с.к.о.
¬ четвертой главе Ђ–азработка и анализ методовизмерительного преобразовани€квази-мгновенной и мгновенной скорости разгонаплазмы в Ёƒ”ї выполненыисследовани€ по улучшению метрологическиххарактеристик врем€пролетных »ѕ— путемсинтеза новых методов измерительногопреобразовани€ квазимгновенной и мгновеннойскорости.
»спользован принцип Ђмногократногоотражени€ї в качестве моделидл€ разработки р€да методовизмерительного преобразовани€квазимгновенной скорости и на его основе предложен методизмерительного преобразовани€ среднейскорости с контролем дифференциальногосигнала пары »ƒ, что, благодар€формированию промежуточной точки опроса»ƒ, позволило уменьшить вдвоеметодическую погрешностьизмерени€скорости ѕѕ.
–азработан методизмерительного преобразовани€квазимгновенной скорости с программируемой попарнойкоммутацией »ƒ, основанный на сочетаниипринципа Ђдвух наблюдателейї и контрол€ отношени€сигналов двух датчиков положени€. —использованием аппарата комбинаторикиполученовыражение дл€ числа возможных комбинаций»ƒ одной группы с »ƒ другой группы попарно ![]() - число группдатчиков;
- число группдатчиков; ![]() - число датчиков вкаждой группе. ќпределено общее количествоточек регистрации как
- число датчиков вкаждой группе. ќпределено общее количествоточек регистрации как  Ц
Ц  =
=![]() и полученовыражениедл€ числа интервалов измерени€ натраектории между группами
и полученовыражениедл€ числа интервалов измерени€ натраектории между группами  . ѕоказано, что интервал между двум€соседними точками регистрации движени€ ѕѕ(тела) на участке траектории между группами »ƒ€вл€етс€ величиной посто€нной, равнойполовине базового рассто€ни€ между »ƒ, чтообеспечивает уменьшение вдвоеметодической погрешности измерени€средней скорости.
. ѕоказано, что интервал между двум€соседними точками регистрации движени€ ѕѕ(тела) на участке траектории между группами »ƒ€вл€етс€ величиной посто€нной, равнойполовине базового рассто€ни€ между »ƒ, чтообеспечивает уменьшение вдвоеметодической погрешности измерени€средней скорости.
— целью дальнейшего увеличени€ числа интервалов измерени€ скорости безувеличени€ числа »ƒ предложен Ђметод координатной функцииї (ћ ‘) дл€измерительного преобразовани€квазимгновенной и мгновенной скорости.—огласно этому методупоследовательностьперехода от координатной функции ( ‘)  к мгновенной скорости
к мгновенной скорости  —формулированытребовани€ к идеальной ‘, главным изкоторых€вл€етс€ инвариантность ко всемпараметрам, кроме координаты движущегос€ѕѕ.»сследованр€д модификаций ‘ -логометрическа€ ‘ (L-типа)
—формулированытребовани€ к идеальной ‘, главным изкоторых€вл€етс€ инвариантность ко всемпараметрам, кроме координаты движущегос€ѕѕ.»сследованр€д модификаций ‘ -логометрическа€ ‘ (L-типа)  , разностно-логометрическа€ (LD-типа)
, разностно-логометрическа€ (LD-типа) , дифференциально-логометрическа€ (DL-типа)
, дифференциально-логометрическа€ (DL-типа) 
 . — использованием численной моделидл€ исследовани€ выходных сигналов »ƒ выполнено моделирование на Ё¬ћразличных ‘. јнализ показал,что свойствами, близкими кидеальной ‘, обладает ‘ DSL-типа, дл€ которойвыполн€ютс€ услови€ инвариантности,ограниченного динамического диапазона,существовани€ первой и второйпроизводной, а также услови€монотонности и чувствительности ‘ кизменениюположени€ ѕѕна большей части интерваламежду соседними »ƒ за исключением примыкающих к нимобластей, где
. — использованием численной моделидл€ исследовани€ выходных сигналов »ƒ выполнено моделирование на Ё¬ћразличных ‘. јнализ показал,что свойствами, близкими кидеальной ‘, обладает ‘ DSL-типа, дл€ которойвыполн€ютс€ услови€ инвариантности,ограниченного динамического диапазона,существовани€ первой и второйпроизводной, а также услови€монотонности и чувствительности ‘ кизменениюположени€ ѕѕна большей части интерваламежду соседними »ƒ за исключением примыкающих к нимобластей, где ![]() имееточень малые значени€.
имееточень малые значени€.
»сследовано вли€ниенеравномерности распределени€ тока посечению ѕѕ на значение ‘ DSL-типа ![]() междуос€ми »ƒ и полосы с током. ѕроведенный расчет функции
междуос€ми »ƒ и полосы с током. ѕроведенный расчет функции  дл€ различных значений
дл€ различных значений  и
и ![]() (рис. 9) имитируетрасчет
(рис. 9) имитируетрасчет

вли€ни€ неравномерностираспределени€ тока по сечению ѕѕ назначение ‘ ![]() .
.
јнализ результатоврасчета показал, что при  = 1,0 м кривые 1-4 на рис. 9, г практическисовпадают. Ёто означает, что при достаточнобольшом рассто€нии между датчиками ‘
= 1,0 м кривые 1-4 на рис. 9, г практическисовпадают. Ёто означает, что при достаточнобольшом рассто€нии между датчиками ‘![]() не зависит отрассто€ни€
не зависит отрассто€ни€ ![]() между ос€ми тока и датчиков, азначит, от неравномерности плотностираспределени€ тока по сечению ѕѕ,однако Ђмертва€ зонаї в этом случаеоказываетс€ более 50 %. ƒл€ перекрыти€ Ђмертвойзоныї предложено устанавливать несколькопар »ƒ и проводить их попарную коммутациюметодом, изложенным выше.
между ос€ми тока и датчиков, азначит, от неравномерности плотностираспределени€ тока по сечению ѕѕ,однако Ђмертва€ зонаї в этом случаеоказываетс€ более 50 %. ƒл€ перекрыти€ Ђмертвойзоныї предложено устанавливать несколькопар »ƒ и проводить их попарную коммутациюметодом, изложенным выше.
ѕри моделированииустановлено, что вли€ние колебани€ длиныѕѕ в процессе движени€ на ‘ Ц ничтожно мало.ќбнаруженосильное вли€ние на эту погрешностьрассто€ни€ между датчиками. “ак, приуменьшении ![]() с 1,0 м до 0,1 мпогрешность возрастает до 90 %. ќтсюда следуетнеобходимость выбора рассто€ни€ междудатчи-камипор€дка 1,0 м, что совпадает с выводом поусловию инвариантности ‘
с 1,0 м до 0,1 мпогрешность возрастает до 90 %. ќтсюда следуетнеобходимость выбора рассто€ни€ междудатчи-камипор€дка 1,0 м, что совпадает с выводом поусловию инвариантности ‘ ![]() краспреде-лению плотности тока по сечениюѕѕ.
краспреде-лению плотности тока по сечениюѕѕ.
Ќедостатком ‘DSL-типа€вл€етс€ нару-шениечувствительности вобласти Ђмертвых зонї, что приводит кувеличению ошибки измерени€.ѕредложены и проанализированыметоды изме-рительного преобразовани€квазимгновенной ско-рости на основе нулевого методаконтрол€ ‘ с ликвидацией Ђмертвых зонїпереключением или суммированием ‘. ƒиаграммы,по€сн€ющие предложенную идею объединени€ методаконтрол€ ‘ DSL-типа ![]() , нулевого метода и принципа Ђмногократного отражени€їприведены на рис. 10, а структурна€ схема»ѕ—, реализующего эту идею, Ц на рис. 11.
, нулевого метода и принципа Ђмногократного отражени€їприведены на рис. 10, а структурна€ схема»ѕ—, реализующего эту идею, Ц на рис. 11.

—уть новогометода измерительного преобразовани€ квазимгновеннойскорости заключаетс€в
организации периодическогосмещени€ ‘ на заранее рассчитанные и запомненныезначени€![]() такимобразом, что смещенна€параллельно самой себе крива€ ‘ каждый раз пересекает ось 0x,последовательно формиру€ множествоточек регистрации координат
такимобразом, что смещенна€параллельно самой себе крива€ ‘ каждый раз пересекает ось 0x,последовательно формиру€ множествоточек регистрации координат ![]() , обратнойсинтезиро-ванной ‘ F(x) и ее непрерывнымдифференцированием по времени tв процессе движени€ ѕѕ (второй вариантиспользовани€ ћ ‘).
, обратнойсинтезиро-ванной ‘ F(x) и ее непрерывнымдифференцированием по времени tв процессе движени€ ѕѕ (второй вариантиспользовани€ ћ ‘).
–азработан методизмерительного преобразовани€мгновенной скорости с использованием ‘
DSL-типаи аппроксимацией сигнала »ƒэкспоненциальной функцией.ѕолучено выражениедл€ мгновенного значени€ скорости в любой моментвремени t:![]() , где
, где  - экспериментально определ€емыймасштабирующий коэффициент, равныйинтервалу траектории, на границахкоторого сигнал »ƒ измен€етс€ в
- экспериментально определ€емыймасштабирующий коэффициент, равныйинтервалу траектории, на границахкоторого сигнал »ƒ измен€етс€ в ![]() =2,73раз. “очность нахождени€ скорости поэтой формуле определ€етс€методической погрешностьюаппроксимации ‘ DSL-типа функцией гиперболическоготангенса. “акимобразом, проблемой при реализацииописанного метода €вл€етс€ выбораппроксимирующей функции,котора€ обеспечивала быминимальную ошибку аппроксимации наконтролируемом интервале путимежду двум€ соседними датчиками–» . ƒл€ решени€ этойпроблемы в главе 5 исследуетс€возможности применени€ »Ќ— в качествеаппроксиматора.
=2,73раз. “очность нахождени€ скорости поэтой формуле определ€етс€методической погрешностьюаппроксимации ‘ DSL-типа функцией гиперболическоготангенса. “акимобразом, проблемой при реализацииописанного метода €вл€етс€ выбораппроксимирующей функции,котора€ обеспечивала быминимальную ошибку аппроксимации наконтролируемом интервале путимежду двум€ соседними датчиками–» . ƒл€ решени€ этойпроблемы в главе 5 исследуетс€возможности применени€ »Ќ— в качествеаппроксиматора.
”читыва€ многообразиеразработанных методов измерительногопреобразовани€средней и
квазимгновеннойскорости проведена ихсистематизаци€ по 8-ми уровн€мкачества.
ќтмечено, что дл€ обоснованноговыбора методаизмерительного преобразовани€скорости необходимо вследующей главе решить задачумногокритериального рангового анализавариантов сучетом ранжировани€ заданных критериев.
ƒл€ дальнейшегоповышени€ точности измерительногопреобразовани€ скорости предложен метод сиспользованием ‘ DSL-типа и аппроксимацией сигнала »ƒобратно-экспоненциальной функцией.ѕолучено выражение дл€ вычислени€ мгновенной скорости этимметодом:  /2
/2![]() . ѕоказано, что по сравнению спредыду-
. ѕоказано, что по сравнению спредыду-
щим этот методобеспечивает почти двукратное приращениеточности аппроксимации. Ќедостатком €вл€етс€сложность вычислительногоалгоритма.
— целью упрощени€зависимостимгновенной скорости от ‘ предложен метод измерительного преобразовани€ сиспользованием ‘LL-типа иаппроксимацией сигнала »ƒэкспоненциальной функцией, полученовыражение дл€ вычислени€ мгновеннойскорости:![]() .“ак как ‘ LL-типапредставл€ет собой пр€мую линию (несчита€ придатчиковые области),этоуменьшает погрешность измерени€ отнелинейности ‘. „токасаетс€ присущего ћ ‘ сиспользованием ‘ LL-типанизкой точности аппроксимациивыходного сигнала »ƒ, то этотнедостаток может быть устранен применением»Ќ— в качестве аппроксиматора.
.“ак как ‘ LL-типапредставл€ет собой пр€мую линию (несчита€ придатчиковые области),этоуменьшает погрешность измерени€ отнелинейности ‘. „токасаетс€ присущего ћ ‘ сиспользованием ‘ LL-типанизкой точности аппроксимациивыходного сигнала »ƒ, то этотнедостаток может быть устранен применением»Ќ— в качестве аппроксиматора.
ƒл€ устранени€другого недостатка последнегометода,св€занного с использованием априорнозадаваемого неточного коэффициентаSe, предложен и обоснованметод измерительного преобразовани€, прикотором в качестве масштабирующегокоэффициента используетс€ априориточно известное значение l рассто€ни€ между»ƒ, а значение мгновенной скоростиопредел€етс€ по формуле:  .
.
ќбщим недостатком рассмотренныхметодов на основе ћ ‘€вл€етс€ наличие в алгоритме вычислени€ скорости операции дифференцировани€ ‘,Ђподчеркивающейїэлектромагнитные помехи на входе »ѕ—. ƒл€его устранени€ предложен метод измерительногопреобразовани€ с повышеннойпомехозащищенностью, основанный на использовании в измерительномалгоритме операции геометрического усреднени€сигналов датчиков положени€.
ƒоказано, чтомгновенна€ скорость v ѕѕ можетопредел€тьс€ по формуле  ,где
,где ![]() - const;
- const;  ,
,![]() - выходныенапр€жени€ соседних »ƒ ;I Ц ток в цепиѕѕ; N и
- выходныенапр€жени€ соседних »ƒ ;I Ц ток в цепиѕѕ; N и ![]() Цсоответственно, число витков и площадь сечени€катушки»ƒ. ¬ведение дополнительной операцииизмерени€ тока в движущемс€ ѕѕ позвол€ет исключить операциюдифференцировани€ по времени и обеспечивает более высокуюпомехозащищенность »ѕ—(вывод о включении в структуру подсистемы управлени€ »»”—измерительного преобразовател€ токасовпадает с выводом, полученным в главе 1 при анализеалгоритма работы ѕќ дл€ формировани€ команды на началоизмерени€ очередного значени€ скорости).
Цсоответственно, число витков и площадь сечени€катушки»ƒ. ¬ведение дополнительной операцииизмерени€ тока в движущемс€ ѕѕ позвол€ет исключить операциюдифференцировани€ по времени и обеспечивает более высокуюпомехозащищенность »ѕ—(вывод о включении в структуру подсистемы управлени€ »»”—измерительного преобразовател€ токасовпадает с выводом, полученным в главе 1 при анализеалгоритма работы ѕќ дл€ формировани€ команды на началоизмерени€ очередного значени€ скорости).
¬ыражение дл€ скорости  было выведено придопущении о том, что в ѕѕ протекает посто€нный ток. ќднако,учитыва€, что фактически этот ток €вл€етс€ переменным при питании отемкостногоисточника или носитимпульсныйхарактер при питании отиндуктивного накопител€,показано, что при этом нарушаетс€ пропорциональность сигнала »ƒ искорости ѕѕ:
было выведено придопущении о том, что в ѕѕ протекает посто€нный ток. ќднако,учитыва€, что фактически этот ток €вл€етс€ переменным при питании отемкостногоисточника или носитимпульсныйхарактер при питании отиндуктивного накопител€,показано, что при этом нарушаетс€ пропорциональность сигнала »ƒ искорости ѕѕ:
![]()
![]()
![]()
![]() , (3)
, (3)
где Bn»ƒ Ц нормальна€ составл€юща€магнитной индукции в точке расположени€»ƒ; 0 Цмагнитна€посто€нна€; x(t)Ц координатаположени€ центра масс ѕѕ, причем за началокоординат принимаетс€ точкапересечени€ траектории движени€ иортогональной ей линии,проход€щей через »ƒ; y Цминимальноерассто€ние от траектории движени€ доточки расположени€ »ƒ; l, m, p Ц геометрическиепараметры ѕѕ (длина, ширина и высота,соответственно) относительно его центра масс; F (x (t), y, l, m, p) Ц функци€взаимного положени€ »ƒ и ѕѕ.
Ќа рис. 12 показан видзависимостей первой и второй составл€ющейсуммарного сигнала »ƒ согласно (3)от координаты положени€ ѕѕ. ƒл€компенсации указанной пог-решностипредложен комбинированный методизмерени€ мгновенной скорости, основанныйна одновременном использовании в »ѕ— двух типов датчиков положени€ Ц »ƒ и датчиков’олла, расположенных на равныхрассто€ни€х y от линии, перпендикул€рнойтраектории движени€ ѕѕ.
ѕолучено выражение дл€переменного коэффициента K(t) вида:
K(t) =  ==
==![]() и доказано, чтоперемножением еготекущего значени€ и значени€ сигналадатчика ’олла можно получатьсигнал, равный второй (вызы-
и доказано, чтоперемножением еготекущего значени€ и значени€ сигналадатчика ’олла можно получатьсигнал, равный второй (вызы-

ваемойизменением тока) составл€ющей сигнала»ƒ согласно (3). “огда в процессе измерени€скоростисигнал ![]() используетс€как входной сигнал дл€описанного »ѕ— с измерением тока, в результате чегокомпенсируетс€ погрешность из-заимпульсного характера тока в ѕѕ.
используетс€как входной сигнал дл€описанного »ѕ— с измерением тока, в результате чегокомпенсируетс€ погрешность из-заимпульсного характера тока в ѕѕ.
ќписанные последниедва метода измерительного преобразовани€скорости требуютпредвари- тельного моделировани€процессов в конкретномЁƒ”дл€ определени€значений р€да параметровв качествеисходных данных. — целью уменьшени€ объемааприорнойинформации за счет увеличени€ объемаапостериорной информации, получаемой впроцессе измерени€, предложено объединитьв одном »ѕ— метод ћ ‘ дл€ измерительногопреобразовани€ мгновенной скорости иврем€пролетный метод измерени€ среднейскорости ѕѕ с последующим перерасчетом получаемыхсредних значений скорости в мгновенные значени€ вотдельные моменты времени в процесседвижени€ ѕѕ. —чита€ эти значени€образцовыми,можно периодически корректировать врежиме on-line параметры »ѕ—, основанного наметодећ ‘.
ƒл€ реализациибазирующегос€ на этой идее методас обратной информационной св€зьюпо каналу измерени€ среднейскорости получено выражение дл€значени€ мгновенной скорости в любой момент времени ti: ![]() где V(ti)Ц среднеезначение скорости в интервале временимежду моментами ti и
где V(ti)Ц среднеезначение скорости в интервале временимежду моментами ti и![]() .ќбъединениев »ѕ— двух контуров (–– и–» ) на базе одних и тех же датчиков положени€ позвол€етвыполн€ть измерительноепреобразование мгновенной скорости ѕѕ методом ћ ‘ на базе–» , а егосредней скорости - с помощьюврем€пролетного метода набазе –– с последующимуточнением согласно последней формулемгновенныхзначенийскорости в дискретные моментывремени. “акимобразом, вдольтраектории организуетс€множество точек коррекции мгновеннойскорости, совпадающих с координатамидатчиковв –– .
.ќбъединениев »ѕ— двух контуров (–– и–» ) на базе одних и тех же датчиков положени€ позвол€етвыполн€ть измерительноепреобразование мгновенной скорости ѕѕ методом ћ ‘ на базе–» , а егосредней скорости - с помощьюврем€пролетного метода набазе –– с последующимуточнением согласно последней формулемгновенныхзначенийскорости в дискретные моментывремени. “акимобразом, вдольтраектории организуетс€множество точек коррекции мгновеннойскорости, совпадающих с координатамидатчиковв –– .
ѕ€та€ глава Ђ—труктурный ипараметрический синтез измерительныхпреобразователей скоростиїпосв€щена разработке и исследованиюметодов структурного ипараметрического синтеза »ѕ— дл€»»”— Ёƒ”. –азработана методологи€структурного синтеза »ѕ—, которым вуслови€х помех обеспечиваетс€одновременное достижение минимума ошибкиобнаружени€ сигнала (ложной фиксации ѕѕили его пропуска датчиками) и минимумапотери информации о параметрах сигналадатчиков (критерий Ђдвойного минимумаї).ƒл€ этого предложено в состав включенногона выходе датчиков фильтра, оптимальногопо критерию минимума ошибки обнаружени€сигнала, ввести корректирующее звено,обеспечивающее минимум потери информациио параметрах сигнала с выходов датчиков.–ешена задача структурного синтеза такогооптимального фильтра как составной части»ѕ— по предложенному критерию Ђдвойногоминимумаї и получено выражение дл€коэффициента преобразовани€  корректирующего звенаоптимального фильтра при условии, чтозакон распределени€ выходных сигналовдатчиков (входных сигналов фильтра) x €вл€етс€нормальным, что имеет место дл€ »ƒ:
корректирующего звенаоптимального фильтра при условии, чтозакон распределени€ выходных сигналовдатчиков (входных сигналов фильтра) x €вл€етс€нормальным, что имеет место дл€ »ƒ: ![]() , где
, где  - дисперси€ входного сигналаx фильтра.ƒл€ датчиков иного типа с неизвестнымзаконом распределени€ выходных сигналоврекомендовано между датчиками –– (–» ) иоптимальным фильтром устанавливатьфункциональный преобразователь ссинтезированной передаточной функцией,обеспечивающий формирование выходногосигнала, распределенного по нормальномузакону независимо от закона распределени€его входного сигнала. —интез оптимальногофильтра по критерию Ђдвойного минимумаїобеспечивает минимум веро€тности ошибкиобнаружени€ движущегос€ ѕѕ с помощью »ѕ— впредположении, что сами датчики –– этогоне обеспечивают. »сследован и другойподход: параметрический синтез самого–– по критерию минимума веро€тностиошибки обнаружени€ сигнала датчиков вуслови€х помех. –азработана методикапараметрического синтеза –– сиспользованием теории оптимальных методовприема при флуктуационных помехах,согласно которой, задава€сь длинойконтролируемого участка S, допустимойошибкой обнаружени€ сигнала
- дисперси€ входного сигналаx фильтра.ƒл€ датчиков иного типа с неизвестнымзаконом распределени€ выходных сигналоврекомендовано между датчиками –– (–» ) иоптимальным фильтром устанавливатьфункциональный преобразователь ссинтезированной передаточной функцией,обеспечивающий формирование выходногосигнала, распределенного по нормальномузакону независимо от закона распределени€его входного сигнала. —интез оптимальногофильтра по критерию Ђдвойного минимумаїобеспечивает минимум веро€тности ошибкиобнаружени€ движущегос€ ѕѕ с помощью »ѕ— впредположении, что сами датчики –– этогоне обеспечивают. »сследован и другойподход: параметрический синтез самого–– по критерию минимума веро€тностиошибки обнаружени€ сигнала датчиков вуслови€х помех. –азработана методикапараметрического синтеза –– сиспользованием теории оптимальных методовприема при флуктуационных помехах,согласно которой, задава€сь длинойконтролируемого участка S, допустимойошибкой обнаружени€ сигнала  и порогом срабатывани€
и порогом срабатывани€  регистратора сигналов, можноопределить оптимальные параметры –– »ѕ—(число датчиков положени€ в –– , значени€интервалов между соседними датчиками).ќсобенностью этой методики€вл€етс€ необходимостьвыполнени€требовани€,согласно которому веро€тность
регистратора сигналов, можноопределить оптимальные параметры –– »ѕ—(число датчиков положени€ в –– , значени€интервалов между соседними датчиками).ќсобенностью этой методики€вл€етс€ необходимостьвыполнени€требовани€,согласно которому веро€тность ![]() илиошибки типа Ђотказ запускаї регистратора
илиошибки типа Ђотказ запускаї регистратора![]() (это приводит к снижениюнадежности функционировани€ »ѕ—), либо уменьшениемчисла каналов регистрации, что, в своюочередь, приводит к снижению точностиизмерени€ скорости. ƒл€ исключени€ этого проведенструктурныйсинтез –– по критерию минимальнойошибки обнаружени€ сигналов датчиков вуслови€х помех, выведены соотношени€, доказывающиеэффективность схемобъединени€датчиков (—ќƒ) в каждом каналерегистрации –– дл€уменьшени€ веро€тности ошибки обнаружени€сигналов и построены соответствующиезависимости.–азработана методикаструктурного синтеза –– , оптимального покритерию минимальной веро€тности ошибкиобнаружени€
(это приводит к снижениюнадежности функционировани€ »ѕ—), либо уменьшениемчисла каналов регистрации, что, в своюочередь, приводит к снижению точностиизмерени€ скорости. ƒл€ исключени€ этого проведенструктурныйсинтез –– по критерию минимальнойошибки обнаружени€ сигналов датчиков вуслови€х помех, выведены соотношени€, доказывающиеэффективность схемобъединени€датчиков (—ќƒ) в каждом каналерегистрации –– дл€уменьшени€ веро€тности ошибки обнаружени€сигналов и построены соответствующиезависимости.–азработана методикаструктурного синтеза –– , оптимального покритерию минимальной веро€тности ошибкиобнаружени€ ![]() , и выбора однойиз двух структур —ќƒ наэлементе » или на мажоритарном элементе в зависимости от исходных данных.
, и выбора однойиз двух структур —ќƒ наэлементе » или на мажоритарном элементе в зависимости от исходных данных.
ƒл€проведени€ вычислительногоэксперимента посравнительному анализу алгоритмов изме-
рительного преобразовани€скорости ѕѕ разработана комплексна€математическа€ модель системы ЂЁƒ”-»ѕ—ї, включающа€ модельдвижени€ ѕѕ,модель электромагнитного пол€ тока в ѕѕ,модель »ƒ, модель алгоритма вычислени€скорости(рис. 13). ¬качестве начальных условийдл€ модели ис- пользуютс€:геометрические и электрические параметры канала рельсотрона, напр€жение назажимах конденсаторной батареи »»Ё навходе Ёƒ”; скорость предускорени€ ѕѕ;геометрические и электрические параметрыдатчиков.ќсновой математическоймодели движени€ ѕѕ €вл€етс€ модификаци€системы нелинейных дифференциальныхуравнений јрцимовича. ƒл€ расчетамагнитного пол€ ѕѕ использованаисследованна€ в главе2 модель Ђпараллелепипед стокомї. ƒл€ расчетанапр€жени€ Uна выходе интегратора,подключенного к »ƒ,использовалось выражение: ,где T Цврем€ измерени€; w Цчисло витков обмотки »ƒ; S Цплощадь сечени€ »ƒ;
,где T Цврем€ измерени€; w Цчисло витков обмотки »ƒ; S Цплощадь сечени€ »ƒ;  - нормальна€ к сечению »ƒсоставл€юща€ магнитного пол€; x Ц координатагеометрического центра ѕѕ. омплексна€математическа€ модель системы "Ёƒ” Ц »ѕ—" реализована ввиде программного комплекса MMVS.
- нормальна€ к сечению »ƒсоставл€юща€ магнитного пол€; x Ц координатагеометрического центра ѕѕ. омплексна€математическа€ модель системы "Ёƒ” Ц »ѕ—" реализована ввиде программного комплекса MMVS.
Ќа комплексноймодели, объединенной спрограммой- нейроимитатором NeuroPro, проведенсравнительный анализ по точностивариантов (рис. 14) структуры »ѕ—на базе ћ ‘ и »Ќ—, результатыкоторого приведены на рис. 15.Ёксперимент на модели показал, чтолучшим по точности ипомехозащищенности €вл€етс€ структура нейросетевого»ѕ— с подачей на вход »Ќ—значений ‘ LL-типа и ее производной повремени и получением на выходе значений скорости(вариант 3). ƒоказано, чтоприменение »Ќ— в качествеаппроксиматора позвол€ет повыситьточность »ѕ— в несколькораз по сравнению с аппроксимацией ‘эмпирическими выражени€ми, причем, приувеличении числа слоев »Ќ— до 2,5 с 10 нейронами вкаждом слое методическа€ погрешность »ѕ—может быть снижена до ![]() 1,2%.
1,2%.
ѕредложеналгоритм параметрическогосинтеза »ѕ— с переменным шагом опросапо критерию минимума суммарной (методическойи инструментальной) погрешности измерени€скорости, основанный на сочетанииoff-line -планировани€ дл€ расчета первогоинтервала пути и on-line- планировани€ дл€ расчета каждогопоследующего интервала пути междуочередными точками опроса в –» непосредственно впроцессе измерительного преобразовани€ скорости.¬ результате обеспечиваетс€адаптаци€ шага точек опроса в–» к результатам измерени€ в режиме on- line.
ѕолучена формула дл€оптимального переменного шага![]() опроса(начина€ со 2-го) с его адаптацией крезультатам измерени€ интервала
опроса(начина€ со 2-го) с его адаптацией крезультатам измерени€ интервала![]() прохождени€ ѕѕпредыдущего участка пути:
прохождени€ ѕѕпредыдущего участка пути:![]() =
=  , а также формула дл€оптимального шага
, а также формула дл€оптимального шага ![]() на 1-минтервале пути:
на 1-минтервале пути:


![]() где
где ![]() ,
,  - с.к.о. методическойпогрешности измерени€ на i-м и
- с.к.о. методическойпогрешности измерени€ на i-м и
(i +1)-м интервалах пути,соответственно; i =2, 3, 4,... Е n;  и
и ![]() -с.к.о. случайных погрешностей измерени€интервалов времени и пути,соответственно.
-с.к.о. случайных погрешностей измерени€интервалов времени и пути,соответственно.
¬ыбира€  между точками опроса в –» по этойформуле, можно обеспечить измерительноепреобразование скорости на i-м интервале(начина€ со второго) с минимальнойсуммарной погрешностью
между точками опроса в –» по этойформуле, можно обеспечить измерительноепреобразование скорости на i-м интервале(начина€ со второго) с минимальнойсуммарной погрешностью ![]() .
.
ѕоказанаэффективность применени€ систем нечеткихправил дл€ выбора оптимальногометодаизмерительного преобразовани€скорости в Ёƒ” сиспользованием многокритериальногорангового анализа, который нетребует количественной оценкичастных критериев и решени€ сложнойоптимизационной задачимногокритериального синтеза. ¬ качестве примерапроведен сравнительный анализ сприменением равновесных инеравновесных критериев четырехвариантов »ѕ—, основанных на разработанныхразновидност€х доплеровского иврем€пролетного методов. ”становлено, что прииспользовании равновесных критериевотсутствует преимущество какого-либо метода, апри неравновесных критери€х наилучшим изсравниваемых методов, обеспечивающим наибольшуюпомехозащищенность, €вл€етс€врем€пролетный метод смаксиселекторнойблокировкойканалов измерени€. »спользованна€ методикамногокритериального рангового анализа сприменениемпопарного анализа методов измерительногопреобразовани€ скорости и составлениипарных сравнений ввиде лингвистических высказываний сранжированием по методу —аати, позвол€етиз предложенныхметодоввыбиратьоптимальный методизмерительного преобразовани€ скорости с учетом конкретных условий.
ѕроведенасистематизаци€ вариантов индивидуальногои комбинированногоиспользовани€ различных интеллектных компонент и намеченыперспективы применени€ методов »» взадачах измерительного преобразовани€параметров движени€. ѕредложены вариантыприменени€ одновременно несколькихинтеллектных компонент при структурномсинтезе »ѕ—, в том числе сочетание off-lineи on-line планировани€ с использованиемалгоритмов систем нечетких правил (—Ќѕ)на первом этапе и алгоритмов системпродукционных правил (—ѕѕ) на втором этапе(сочетание —Ќѕ+—ѕѕ) илиалгоритмов —Ќѕ на первомэтапе и алгоритмов »Ќ— на второмэтапе
учетом конкретныхусловий.
(сочетание —Ќѕ+ »Ќ—),что обеспе-чиваетс€ применениемдинамической ре-конфигурации структуры»ѕ— в процессе эксперимента на Ёƒ”.”казано на пер-спективностькомбинации систем, осно-ванных напрецедентах, с идеей дина-мическойреконфигурации »ѕ—, а такженастраиваемых на нужную структуругибридных сетей на базе —Ќѕ и »Ќ— дл€обеспечени€ точности измери-тельногопреобразовани€ даже при большихизменени€х внешних факторов, например,при переходе Ёƒ” в нерасчет-ный режимфункционировани€. ¬арианты »ѕ— сэлементами »» показаны в табл. 2, из которойвидно, что в разработанных »ѕ—используютс€ одна или двеинтеллектные компоненты(»Ќ— и ј√, —Ќѕ и —ѕѕ, »Ќ— и —Ќѕ).¬озможно объединение »ѕ— (»ѕ— соптимизацией 1-го интервала междудатчиками и »ѕ— с адаптациейшага опроса) одним методом »» (Anytime-алгоритм).
¬ приложени€х приведены тексты разработанныхпрограмм Ё¬ћ, зарегистрированных вќтраслевых фондах алгоритмов и программ,схемы и описани€ запатентованныхтехнических решений, фотографииразработанных и изготовленных »ѕ— и »»”— Ёƒ”;акты и справки о внедрении и использованиирезультатовдиссертационной работы.
ќсновные результатыдиссертационного исследовани€:
1. ќбоснованотребование к точности »ѕ— как элементу»»”— Ёƒ” с управл€емым разгоном(допустима€ погрешность »ѕ—![]() 2,8 %) при заданнойпогрешности управлени€
2,8 %) при заданнойпогрешности управлени€  3,0 % дл€ реализации простого алгоритмауправлени€ Ёƒ” с однократным расчетом моментаподачи команды на прекращение подводаэнергии к Ёƒ” путем шунтировани€ егорельсового канала. ѕредложенный и обоснованный режимЂпрерывистогої измерени€ мгновеннойскорости только на участках квазиравномерного движени€ припитании Ёƒ” от емкостного источникаэнергии в отличие от традиционногоизмерени€скорости на всей траектории движени€ ѕѕпозвол€ет снизить динамическуюпогрешность измерени€скорости до пренебрежимо малых значений(
3,0 % дл€ реализации простого алгоритмауправлени€ Ёƒ” с однократным расчетом моментаподачи команды на прекращение подводаэнергии к Ёƒ” путем шунтировани€ егорельсового канала. ѕредложенный и обоснованный режимЂпрерывистогої измерени€ мгновеннойскорости только на участках квазиравномерного движени€ припитании Ёƒ” от емкостного источникаэнергии в отличие от традиционногоизмерени€скорости на всей траектории движени€ ѕѕпозвол€ет снизить динамическуюпогрешность измерени€скорости до пренебрежимо малых значений(![]() 0,25 %) притребовании к быстродействию »ѕ— Ц не более 3,0 мкс.
0,25 %) притребовании к быстродействию »ѕ— Ц не более 3,0 мкс.
2. »сследование методомвычислительного эксперимента сиспользованием объемной численной модели ѕѕ стоком вли€ни€ на Ёƒ— »ƒ кон≠структивныхпараметров системы Удвижущийс€ ѕѕ-датчики положени€Ф впервые позволило строгообосновать выбор границ диапазона базового рассто€ни€ междусоседними »ƒ в –– дл€ »»”— Ёƒ” прииспользовании врем€пролетного методаизмерени€скорости.
3. ѕроведенное исследование составл€ющих инструментальнойпогрешности измерени€ско-

рости ѕѕ в Ёƒ” сисполь-зованием компьютерногомодели-ровани€ позволило получить еепредельные оценки при измерениисредней (![]() 5,2 %) и мгновенной(
5,2 %) и мгновенной(![]() 1,7 %) скорости.ѕолученные выражени€ дл€ методическойпог-решности измерени€ скорости плазмы вЁƒ” врем€пролетным методом позволилитеоретически обосновать выборравноускорен-ного движени€ в качестве рас-четного режима, обеспечивающегоминимальную методическую пог-решность измерени€ скорости,и доказать, что при контроле ско-ростиврем€пролетным методом в Ёƒ” с управл€емым разгономпред-почтительным с точки зрени€ми-нимизацииметодической погреш-ности €вл€етс€ вариант с заданным интерваломпути, а в Ёƒ” с неуправл€емым разгоном - вариант сзаданным интервалом времени.
1,7 %) скорости.ѕолученные выражени€ дл€ методическойпог-решности измерени€ скорости плазмы вЁƒ” врем€пролетным методом позволилитеоретически обосновать выборравноускорен-ного движени€ в качестве рас-четного режима, обеспечивающегоминимальную методическую пог-решность измерени€ скорости,и доказать, что при контроле ско-ростиврем€пролетным методом в Ёƒ” с управл€емым разгономпред-почтительным с точки зрени€ми-нимизацииметодической погреш-ности €вл€етс€ вариант с заданным интерваломпути, а в Ёƒ” с неуправл€емым разгоном - вариант сзаданным интервалом времени.
4.–азработанна€ и реализо-ванна€ в виденабора программ комплексна€математическа€ мо-дель системы ЂЁƒ”-»ѕ—ї, осно-ванна€ насовместном взаимо-св€занном использовании модели движени€ ѕѕ, моделиэлектромаг-нитного пол€ от тока в ѕѕ, модели»ƒ, модели алгоритма вычислени€ скорости, впервыепозволила проводить сравнительный анализпо точности вариантов структуры »ѕ—методом вычислительного эксперимента на стадиипроектировани€ »ѕ— »»”— безмногочисленных дорогосто€щих натурных экспериментов наЁƒ”, в частности, при объединениикомплексной модели с программой Ц нейроимитаторомпозволила провести выбор вариантаструктуры нейросетевого »ѕ— с подачей на входнейросети значений логарифмо-логометрической ‘ и еепроизводной по времени с получением навыходе значений скорости и доказать, что применение »Ќ—в качестве аппроксиматора повышаетточность »ѕ— в несколько раз по сравнению страдиционной аппроксимацией ‘эмпирическими выражени€ми, причем, приувеличении числа слоев »Ќ— до 2,5 с 10нейронами в каждом слое максимальна€методическа€ погрешность »ѕ— может быть сниженадо ![]() 1,2 %.
1,2 %.
5. ѕолученный комплекс расчетных формул позвол€ет оцениватьскоростные,временныепараметры и положение(координату) движущегос€ѕѕ, а такжеметодические погрешности измерени€ скорости прииспользовании двух вариантовврем€пролетного метода:![]() и
и  в режиме равноускоренногодвижени€, выбранного вкачестве рабочего режима, обеспечивающегоминимальную методическую погрешностьизмерени€ скорости ѕѕ.
в режиме равноускоренногодвижени€, выбранного вкачестве рабочего режима, обеспечивающегоминимальную методическую погрешностьизмерени€ скорости ѕѕ.
6.–азработанный метод измерительногопреобразовани€ скорости, основанный наформировании промежуточных точек опросапутем программируемой попарной коммутациидатчиков, вотличие оттрадиционного врем€пролетного методаобеспечивает возможность перехода отизмерени€ средней скорости на интервалемежду двум€ датчиками к измерениюквазимгновенной скорости ѕѕ при том же числе датчиковположени€ в –– »ѕ—, что позвол€ет повыситьточность измерени€ скорости и какследствие точность управлени€ разгоном истабилизации скорости ѕѕ (тела).
7.ѕредложенные разновидности Ђметодакоординатной функцииї дл€ измерительногопреобразовани€ скорости,основанногона сочетании принципа Ђдвух наблюдателейїи логометрического метода измерени€, а такженулевого метода измерени€ сиспользованием ‘дифференциально-суммарно-логометрическоготипа и аппроксимацией сигнала датчикаположени€ экспоненциальной функцией, в отличие отизвестных методов измерительногопреобразовани€ обеспечивают измерениеквазимгновенной и истинно мгновеннойскорости ѕѕ в Ёƒ” и, соответственно,повышенную точность измерени€ скорости ѕѕ (тела) иуправлени€ Ёƒ”.
8.–азработанный метод измерительногопреобразовани€ скорости ѕѕ сиспользованием в качестве информативного параметрагеометрического среднего сигналовдатчиков положени€, основанный на вы€вленнойинвариантности этого параметра ко всеммешающим факторам и зависимости еготолько от скорости движени€ ѕѕ и тока в ѕѕ, вотличие от других методов измерительногопреобразовани€ мгновенной скоростипозвол€ет повысить помехозащищенность »ѕ—за счет замены операции дифференцировани€ на операциюнепрерывного измерени€ тока в ѕѕ.
9.–азработанные методики параметрического иструктурного синтеза »ѕ—, в том числеоснованныена предложенном критерии Ђдвойногоминимумаї при структурном синтезе иразличных методах »» при параметрическом иструктурном синтезе, в отличие отизвестных подходов позволилиобоснованно определ€ть оптимальныеконструктивные параметры –– (–» ) иструктуру»ѕ— с обеспечением повышенной точности (засчет минимизации составл€ющих погрешностиизмерительного преобразовани€ и компенсацииразличных составл€ющих погрешности),помехозащищенности (за счет минимизациипотерь информации о параметрах сигналовдатчиков положени€ и ошибки обнаружени€сигнала оптимальногофильтра на выходе датчиков »ѕ—), а такжепроводить с использованием аппарата нечетких множествмногокритериальный ранговый анализ ивыбор оптимальных методов измерительногопреобразовани€ без привлечени€ сложногоаппарата теориивекторногосинтеза технических систем.
10. Ќаоснове предложенных новых методов исредств измерительного преобразовани€параметровдвижени€ ѕѕ и тел в Ёƒ”, обладающимиэлементами мировой новизны (23 авторскихсвидетельства ———– и патента –‘на изобретени€) иметодологии проектировани€ »ѕ—, отраженной в 67 публикаци€х и 2-хзарегистрированных программах Ё¬ћ,разработан р€д »ѕ— дл€ »»”— Ёƒ” сотносительной приведенной погрешностьюизмерени€ квазимгновенной скорости ![]() 2,0 % (на базе2,5-слойной »Ќ—). »х использование приреализации простого алгоритмауправлени€ Ёƒ” (с определениеммгновенной скорости, без расчетаускорени€ и однократным расчетоммомента подачи команды на шунтирование – в режиме on-line ибез коррекции его расчетного значени€)обеспечивает погрешность управлени€разгоном ѕѕ
2,0 % (на базе2,5-слойной »Ќ—). »х использование приреализации простого алгоритмауправлени€ Ёƒ” (с определениеммгновенной скорости, без расчетаускорени€ и однократным расчетоммомента подачи команды на шунтирование – в режиме on-line ибез коррекции его расчетного значени€)обеспечивает погрешность управлени€разгоном ѕѕ![]() 3,0 %, а приреализации сложного алгоритма управлени€Ёƒ” (с пам€тью, определением мгновеннойскорости и ускорени€ ѕѕ и несколькимикоррекци€ми в режиме on-line расчетногозначени€ момента подачи команды нашунтирование – )
3,0 %, а приреализации сложного алгоритма управлени€Ёƒ” (с пам€тью, определением мгновеннойскорости и ускорени€ ѕѕ и несколькимикоррекци€ми в режиме on-line расчетногозначени€ момента подачи команды нашунтирование – ) ![]() (1,0-3,0)%.
(1,0-3,0)%.
ѕо материаламисследований разработано и внедрено напредпри€ти€х страны 7 типов и модификаций »ѕ—,устройств и подсистем управлени€ дл€»»”— Ёƒ”, часть которых внесена вќтраслевойкаталог. ѕодтверждена универсальность ивозможность распространени€ на смежные отрасли электротехникипредложенногобазового метода измерительногопреобразовани€ скорости ћ ‘ припроведении измерений в широком диапазонескоростей (от единиц м/с до единиц км/с) врезультатеразработки, изготовлени€ и р€давнедрений (18 комплектов) на отечественныхпредпри€ти€х –јќ ≈Ё— и за рубежом (Ћитва)измерительного преобразовател€ ирегистратора мгновенной скорости контактоввысоковольтных коммутационныхаппаратовтипа Ђћј–—-1ї.
–езультаты вычислительных и физических экспериментов пооценке работоспособности готовыхсхемотехнических решений на основевыполненных исследований подтвержденыпроизводственными испытани€ми в услови€хзаказчиков, удостоверенными актамивнедрени€ вопытно-промышленную эксплуатацию р€да разработанных иизготовленных »ѕ— и »»”—.
«ј Ћё„≈Ќ»≈ ѕќ–≈«”Ћ№“ј“јћ –јЅќ“џ
ƒиссертационна€работа €вл€етс€ итогом исследованийавтора за период 1985Ц2008 г.г. по развитию и обобщению теорииизмерительных преобразователей скоростидвижени€ плазмы дл€ »»”—магнитоплазменных Ёƒ”. ¬ результатепроведени€ комплекса исследованийразработанр€д новых оригинальных методов и средствизмерительного преобразовани€ средней,квазимгновенной и мгновеннойскорости дл€ »»”— магнитоплазменныхЁƒ”, что позволило упроститьсуществующие »»”— Ёƒ” при заданной точностистабилизации скорости и повысить качествоуправлени€ разгоном ѕѕ и тел в Ёƒ”.
—овокупностьвынесенных на защиту положений иполученных в диссертационной работерезультатов позвол€ет классифицировать ихкак научно обоснованныетехнические решени€, внос€щиезначительный вклад в ускорениенаучно-технического прогресса в областиинформационно-измерительных и управл€ющихсистем дл€ высокоскоростного разгонаплазмы и тел с использованиеммагнитоплазменных Ёƒ”, состо€щие: вразработке новых методовизмерительного преобразовани€квазимгновенной и мгновеннойскорости разгона ѕѕ дл€ »»”—магнитоплазменных Ёƒ”,обеспечивающих повышениеточности контрол€ ирегистрации скорости икак следствие высокой точности управлени€разгоном и стабилизации скорости ѕѕ прииспользовании простых алгоритмовуправлени€.
—одержаниедиссертации опубликовано в следующихработах:
ћќЌќ√–ј‘»я
1. ириевский ≈. ¬.»змерение параметров движени€ тел вплазменных электродинамических ускорител€х(ѕараметрический и структурный синтезизмерительных преобразователей).Ц–остов н/ƒ:»зд-во — Ќ÷¬Ў, 2005.Ц392 с.
—“ј“№» ¬∆”–ЌјЋј’, –≈ ќћ≈Ќƒќ¬јЌЌџ’ ¬ј –‘
2. ириевский ≈.¬., алинин ».». ѕреобразователи тока,работающие на эффекте ’олла, дл€ релейнойзащиты автономныхэнергосистем//Ёлектричество. Ц 1982. Ц є3. Ц —. 10Ц14.
3. ириевский ≈.¬.,ћихайлов ј.ј. »нформационный анализфильт≠ра,оптимального по критерию минимума ошибкиобнаружени€//»зв. —ев.Ц авк. науч. центравысш.шк. “ехн. науки.Ц1988.Цє 4. Ц —.64Ц69.
4. ириевский ≈.¬.,ћихайлов ј.ј. »спользованиефункциональ≠ных преобразователей дл€получени€ максимума полезной ин≠формации изсигнала//»зв. вузов. –адиоэлектроника.Ц 1989.Ц є 11. Ц —. 49-51.
5. ириевский ≈.¬.,ћихайлов ј.ј. ¬ыбор параметровраспределенного регистрирующегоконтура измерителей скорости врем€пролетноготипа // »зв. —ев.Ц авк.науч. центра высш. шк. “ехн.науки.Ц1990.Ц є 2.Ц —. 8Ц13.
6. ириевский ≈.¬.,ћихайлов ¬.¬., ’анжиев ј.—. ѕерспективыпостроени€ гибких релейных защит сперестраиваемой архитектурой дл€автономныхэнергосистем // Ёлектричество. Ц1990. Ц є 3. Ц —. 18Ц25.
7. ириевский ≈.¬.,ћихайлов ј.ј. »сследование методическойпогрешности измерителей
скоростиврем€пролетного типа//»зв. —ев.- авк. науч.центра высш. шк. “ехн. науки.Ц1993.Ц є3Ц4.-
—. 84-92.
8. ириевский ≈.¬.,ћихайлов ј.ј. ¬ыбор расчетногорежима дл€ оценки методическойпогрешности измерителейскорости врем€пролетного типа // »зв.—ев.- авк. науч. центра высш. шк. “ехн. науки.Ц 1993. Ц є3Ц4. Ц —. 92-98.
9. ириевский ≈.¬.,ћихайлов ј.ј. ћетрологическа€оценка допустимойошибки обнаруже-
ни€ объектаскоростемером с распределеннымрегистрирующим контуром // »зв. вузов.Ёлектромеханика.Ц 1994. - є 4-5. Ц —. 71-75.
10. ириевский ≈.¬.,ћихайлов ј.ј. ќценка методическойпогрешности измерител€ линейной скорости сраспределенным регистрирующимконтуром//»зв. вузов. Ёлектромеханика.Ц1995.Ц є1Ц2. Ц —. 46-49.
11. ириевский ≈.¬.,ћихайлов ј.ј. јнализ предельнойметодической погрешности измерителей скорости сраспределенным регистрирующимконтуром//»зв. вузов. Ёлектромеханика.Ц1996.Ц
є1-2. Ц —. 54-57.
12. ириевский ≈.¬.,ћихайлов ј.ј. јнализ зависимостидинами≠ческой погрешности скоростемеровврем€пролетного типа от диапазонаизмер€емых скоростей // »зв. вузов.Ёлектромеханика.Ц1997. Ц є3.Ц —.46-52.
13. ириевский ≈.¬.,ћихайлов ј.ј —труктурный синтез системыизмерени€ линейной скоростиврем€пролетного типа//»зв. вузов.Ёлектромеханика.Ц1999.Цє3.Ц—. 77Ц80.
14. ƒолгих ¬.¬., ириевский ≈.¬. онтроль скоростныххарактеристик высоковольтных выключателейемкостным методом//Ёлектротехника.-1999.-є12.Ц—. 45-49.
15. ириевский ≈.¬.,ћихайлов ј.ј. јнализ достоверности методовизмерени€ линейной скорости по критериюминимальной ошибки в услови€х помех//»зв.вузов. Ёлектромеханика. Ц 2000. Ц є 1. Ц —. 85-88.
16. ириевский ≈.¬.,январев —.√. ћоделирование сигналаиндукционного датчика положени€ движущегос€проводника с током//»зв. вузов.—ев.- авк.регион. “ехн.науки.-2000.Цє3.-—.7-10.
17. ириевский ≈.¬.»змерение параметров движени€ сиспользованием метода эталонной координатнойфункции//»зв. вузов. Ёлектромеханика.-2000.-є4.-—. 74-80.
18. ириевский ≈.¬.—равнительный анализ методов измерени€скорости с использованием распределенныхрегистрирующего и измерительного контуров// »зв. вузов. —ев.- авк. регион. “ехн. науки.Ц 2001. Ц є1. Ц —.3-5.
19. ириевский ≈.¬.,ћихайлов ј.ј. ѕараметрический синтезраспределенного регистрирующего контурасистемы измерени€ скоростиврем€пролетного типа//»зв. вузов.Ёлектромеханика. Ц2001. Ц є2.Ц —. 42Ц47.
20. ириевский ≈.¬.,ƒолгих ¬.¬. ѕрибор дл€ эксплуатационногоконтрол€ высоковольтных выключателей попараметрам движени€ контактов емкостнымметодом// Ёлектрические станции.Ц 2001.Ц є 11.Ц —. 56-61.
21. ириевский ≈.¬.,ƒолгих ¬.¬. оррекци€ систематическихпогрешностей логометрическихизмерительных преобразователей //»змерительна€ техника.Ц2002.Цє 5.Ц —. 20-23.
22. ириевский ≈.¬.»сследованиедифференциально-логометрическихкоординатных функ-ций дл€ системы измерени€скорости в электродинамическом ускорителемасс // »зв. вузов. Ёлектро-
механика. Ц 2002. Ц є5. Ц —. 57Ц 61.
23. ириевский ≈.¬.,ћихайлов ј.ј. —интез распределенногорегистрирующего контура врем€пролетногоизмерител€ скорости с адаптацией шагаустановки датчиков//»змерительна€техника.Ц 2002. Ц є10. - —. 53Ц56.
24. ириевский ≈.¬.—труктурные методы повышени€помехозащищенности систем измерени€ скорости вэлектродинамических ускорител€х масс//»зв.вузов. Ёлектромеханика.-2003.-є 3.-—.25-31.
25. ириевский ≈.¬.ѕрименение нулевого метода контрол€координатной функции дл€ повышени€ точностисистем измерени€ линейной скорости // »зв.вузов. —ев.- авк. регион. “ехн. науки. Ц 2003. Ц є2. Ц —. 41Ц 46.
26. ириевский ≈.¬.ћоделирование сигнала индукционногодатчика положени€ движущейс€плазмы//ћетрологи€: ежемес. прил. к журн.Ђ»змерительна€ техникаї.Ц 2003.Ц є 6. Ц —. 36Ц45.
27. ириевский ≈.¬.,январев —.√. омбинированный принципизмерени€ скорости движени€ проводника стоком//»зв. вузов. —ев.- авк. регион. “ехн.науки.Ц2003.Цє 4. Ц —.49-57.
28. ириевский ≈.¬.ѕовышение информативности при измерениипараметров дви жени€ проводника с токомметодом координатной функции//»зв. вузов.—ев.- авк. регион. “ехн. науки.Ц2003.Ц ѕрил. є 5. Ц —. 41Ц 46.
29. ириевский ≈.¬.ћногокритериальный сравнительный анализметодов измерени€ скоростиплазмы вэлектродинамическом ускорителес использованием теории нечеткихмножеств//»зв. вузов. Ёлектромеханика.2003.Ц є6.Ц —.40Ц45.
30. ириевский ≈.¬., ириевский ¬.≈. јнализ нейросетевыхструктур системы измерени€ скорости разгона телв электродинамическом ускорителе // »змерительна€техника. Ц2004.Цє1.Ц—. 39-43.
31. ириевский ≈.¬., ириевский ¬.≈. »сследование динамическойпогрешности измерени€ мгновенной скороститела в плазменном электродинамическомускорителе//»зв. вузов. Ёлектромеханика. Ц2006. Цє2. Ц —. 55-60.
32. ириевский ≈.¬., ириевский ¬.≈. јнализ динамическойпогрешностиподсистемы контро-
л€ мгновеннойскорости в системе функциональнойдиагностики и управлени€ магнитоплазменногоускорител€ масс // онтроль. ƒиагностика. Ц 2008. Ц є 1. Ц —.31-44.
—“ј“№» ¬ ∆”–ЌјЋј’,“≈«»—џ ƒќ Ћјƒќ¬ ¬ ћј“≈–»јЋј’ » —Ѕќ–Ќ» ј’“–”ƒќ¬
Ќј”„Ќџ’ ќЌ‘≈–≈Ќ÷»…
33.ћикропроцессорна€ автоматизированна€система управлени€ импульснымиустановками пр€мого преобразовани€энергии / ≈.¬. ириевский, ¬.¬. ћихайлов, ¬.≈.’аритонов, ≈.—. оршунов, ј.». апустин // ѕр€моепреобразование различных видов энергии вэлектрическую: информ. бюл. Ќауч. совета покомплексной проблеме Ђћетоды пр€могопреобразовани€ тепловой энергии вэлектрическуюї јЌ ——C–. Ц 1987.Цє 4(138).Ц —. 27Ц36.
34. ириевский ≈.¬., азаков ¬.». ќрганизаци€ вычислительныхпроцессов в микропроцессорныхавтоматизированных системах управлени€импульсными установками//ѕр€моепреобразование различных видов энергии вэлектрическую: информ. бюл. Ќауч. совета покомплексной проблеме Ђћетоды пр€могопреобразовани€ тепловой энергии вэлектрическуюї јЌ ——C–.Ц1987.Цє 4 (138).
35. ириевский ≈.¬.,ћихайлов ј.ј. —равнительный анализспособов измерени€ линейной скоростиметаемого тела в электромагнитныхметательных установках//ѕроблемыпреобразовани€ энергии: информ. бюл. Ќаучн.совета по комплексной проблеме Ђћетодыпр€мого преобразовани€ тепловойэнергии в электрическуюї јЌ ——C–-1989.-є2(148).-—.280-286.
36. ириевский ≈.¬.,ћихайлов ј.ј. —интез структуры измерител€скорости метаемого тела с распределеннымрегистрирующим контуром // ѕроблемыпреобразовани€ энергии: информ. бюл.Ќаучного совета по комплексной проблемеЂћетоды пр€мого преобразовани€ тепловойэнергии в электрическуюї јЌ ——C– Ц 1989. Ц є 2 (148). Ц —.286-293.
37.ћикропроцессорна€ система сбора иобработки информации дл€ определени€параметров движени€ сверхзвуковыхпотоков/≈.¬. ириевский, ј.ј. ћихайлов,¬.¬. ћихайлов и др.//ѕередовойпроизводственный опыт/÷Ќ»»Ќ“» ѕ .Ц1989.Цє5(199).Ц —.14Ц16.
38. Kirievsky E.V., MikhailovA.A. Functional transformer application for the obtaining ofmaximum usefulinformation out of signal //Radioelectronics and Communications Systems.Ц1989.ЦVol.32.ЦP.74-79.Ц(Published by Allerton PressInc.,USA).
39.ћикропроцессорна€ системамногоканального контрол€ параметровимпульсов управлени€ /≈.¬. ириевский, ј.ј.ћихайлов, ¬.¬. ћихайлов, ≈.—. оршунов//ѕередовой производственныйопыт/÷»»Ќ“» ѕ .Ц1991.Цє2.Ц—. 29-36.
40. ириевский ≈.¬.Ќейросетева€ реализаци€ системы измерени€параметров движени€ плазмы вэлектродинамических ускорител€х масс //ѕерспективные информационные технологии иинтеллектуальные системы. Ц 2003.Ц є1. Ц —. 50Ц52.
41. ириевский ¬.≈., ириевский ≈.¬. ћногокритериальныйнечеткий ранговый анализ вариантов FuzzyRAV 1.0 (Fuzzy Rank Analysis of Versions)// омпьютерныеучебные программы и инновации.Ц2006.Ц є12.- —. 24Ц26.
42. ириевский ¬.≈., ириевский ≈.¬. —истема моделировани€процессов измерени€ скорости вэлектродинамическом ускорителе (MMVS)//ѕрограммы дл€Ё¬ћ. Ѕазы данных. “опологии интегральныхмикросхем.- 2001. - є1(34). - —.273-274.
43. ириевский ≈.¬.,—едых ј.». —труктурные методы повышени€точности и достоверности измерени€линейной скорости // —редства и системыуправлени€ в технике и технологии:межвуз. сб.науч. тр. ЦЌовочеркасск: Ќѕ», 1991. Ц —. 16-22.
44. ириевский ≈.¬.,—едых ј.». —труктурный метод повышени€точности и достоверности измерени€линейной скорости//ћетоды и средстваизмерени€ механических параметров всистемахконтрол€ и управлени€: тез. докл. к зон.науч.-техн. семинару, г. ѕенза, €нв.1991.Ц ѕенза,1991.Ц —.16Ц17.
45. ириевский ≈.¬.,ƒолгих ¬.¬. ћикропроцессорныйавтоматический регистратор скоростных характеристиквысоковольтных выключателей: “ез. докл. наXIV сессиисеминара Ђ ибернетика электрических системї –јЌ потематике Ђƒиагностикаэлектрооборудовани€ї, г. Ќовочеркасск, 23-25 сент. 1992г.// »зв. вузов. Ёлектромеханика. 1992. Ц є 6. Ц —. 136-138.
46. ириевский ≈.¬.,—едых ј.». ѕовышение точностиврем€пролетных измерителей скорости методомформировани€ специальной координатнойфункции // ћетоды и средства измерени€механических параметров в системахконтрол€ и управлени€: тез. докл. к ¬сесоюз.науч. конф., г. ѕенза, €нв. 1992 г. Ц ѕенза,1992.Ц—.28-29.
47. ириевский ≈.¬., ƒолгих¬.¬. –егистраторпараметров движени€контактоввысоковольт-
ных выключателей //—осто€ние и проблемы техническихизмерений: тез. докл. к ¬серос. 1-й науч.-техн.конф., г. ћосква, но€брь 1994 г. /–ос. метрол.акад;. ћ√“” им. Ѕаумана. Ц ћ.: Ц —. 66Ц67.
48. ≈.¬. ириевский,¬.¬. ƒолгих, ѕ.¬. ƒолгих. ќпыт разработкипереносного диагностического прибораконтрол€ параметров движени€ контактоввысоковольтных выключателей: “ез. докл. наXV сессиисеминара Ђ ибернетика электрическихсистемї –јЌ по тематике Ђƒиагностикаэлектрооборудовани€ї, г. Ќовочеркасск,23-25 сент. 1994 г.// »зв. вузов.Ёлектромеханика. 1994. Ц є 6. Ц —. 136Ц137.
49. ириевский ≈.¬., ириевский ¬.≈.Ёкспериментальные исследовани€ иразработка базы данныхкоординатно-емкостных характеристиквысоковольтных выключателей дл€программировани€ диагностических регистраторо„ј–—-1ї: тез. докл. на XVI сессии семинараЂ ибернетика электрических системї–јЌ по тематике Ђƒиагностикаэлектрооборудовани€ї, г. Ќовочеркасск, 23-25сент. 1996г.//»зв. вузов. Ёлектромеханика.Цє1Ц 2. Ц 1997. Ц —. 138-139.
50. Kirievsky E.V., Dolgikh V.V.Capacitive Monitoring of the Speed of High-Voltage Cutouts// Russian ElectricalEngineering.Ц1999.ЦVol.70, є12.Ц–.67-71 (Published byAllerton Press Inc.(USA), 2001).
51. ириевский¬.≈., ириевский ≈.¬. ѕодбор эмпирическойформулы зависимости сигнала индукционногодатчика от координаты движущегос€проводника с током методом вычислительногоэксперимента // Ќаучно-техническоетворчество молодых Ц возрождению университета: тез.докл. науч.-техн. конф. студентов иаспирантов ё–√“”. Ц Ќовочеркасск: ё–√“”, 1999. Ц —. 131-133.
52. ириевский ≈.¬.ћоделирование электромагнитного пол€движущегос€ плазменного поршн€ врельсотронном ускорителе// ћатематическиеметоды в технике и технологи€х Ц ћћ““-2000: сб.трудов ћеждунар. науч. конф: в 7 т. Ц “.2, секции2,8/—анкт-ѕетербург. гос. технол. ин-т (техн.ун-т).Ц —ѕб.,2000. Ц—.145-147.
53. ириевский≈.¬., ириевский ¬.≈. ѕрименениенейронных сетей дл€ повышени€ точности измерени€параметров движени€ методом эталоннойкоординатной функции//“еори€, методы исредстваизмерений, контрол€ и диагностики:материалы ћеждунар. науч.-практ. конф., г.Ќовочеркасск: в 10 ч./ёж-–ос. гос. техн. ун-т(Ќѕ»).ЦЌовочеркасск: ё–√“” (Ќѕ»), 2000.Ц „.5. Ц —. 20Ц26.
54. ириевский ≈.¬.,январев —.√. ћатематическоемоделирование сигнала датчика положени€ движущегос€объекта в системе автоматизации научныхисследований электрофизической уста- новки// онтроль,измерени€, информатизаци€: материалыћеждунар. науч.-техн. конф.- Ѕарнаул: ј√“”, 2000. - —. 164-165.
55. ириевский≈.¬., ириевский ¬.≈. јнализ вли€ни€скорости движущегос€ проводника с током насигнал датчика положени€ в системахуправлени€ его разгоном: тез. докл. регион.науч.-техн.конф. "”правление в технических,социально-экономических имедико-биологических системах", (г. Ќовочеркасск, апр.2000г.)//»зв. вузов. —ев.- авк. регион. “ехн.науки.Ц2000.Цє 4.Ц —.122.
56. ириевский≈.¬., ириевский ¬.≈. —равнительныйанализ методов измерени€ скоростидвижени€ макротел в каналеэлектродинамического ускорител€//»нформационные технологии и управление:юбил. сб. науч. тр. факультета информационныхтехнологий и управлени€/ёж.-–ос. гос. техн.ун-т. ЦЌовочеркасск: –ед. журн. »зв. вузов.Ёлектромеханика, 2001. Ц—. 17Ц24.
57. ириевский ≈.¬.,январев —.√. »змерение скоростидвижени€ проводника с током методомгеометрического усреднени€ сигналовдатчиков положени€//“еори€, методы исредства измерений, контрол€ и диагностики:материалы IIћеждунар. науч.-практ. конф., г. Ќовочеркасск, 21 сент.2001 г.: в 4 ч./ёж.-–ос. гос. техн. ун-т (Ќѕ»).-Ќовочеркасск: ќќќ Ќѕќ Ђ“емпї, 2001.-„. 3.Ц —.72-74.
58. ириевский ≈.¬.,январев —.√. омбинированный методизмерени€ разгона дл€ системы управлени€магнитоплазменным ускорителем//Ќовыетехнологии управлени€ движениемтехническихобъектов: материалы 4-й ћеждунар. науч.-техн.конф.Ц–остов н/ƒ: »зд-во — Ќ÷ ¬Ў, 2001.Ц—. 94-95.
59. ириевский ≈.¬., ириевский ¬.≈. ѕрименение метода эталонной координатной функции дл€ измерени€ скорости движени€ контактов высоковольтных выключателей//—овременные энергетические системы и комплексы и управление ими: материалы ћеждунар. науч.-практ. конф., г. Ќовочеркасск, 5 июл€ 2001 г.: в 3 ч. / ёж.-–ос. гос. техн. ун-т (Ќѕ»). ЦЌовочеркасск:”ѕ÷ "Ќабла" ё–√“” (Ќѕ»), 2001. Ц„.1.Ц —.72.
60. ириевский ≈.¬.»сследование вли€ни€ параметровмагнитоплазменного ускорител€ нанапр€жение индукционного датчика//ћатематические методы в технике и технологи€хЦ ћћ““-2002:сб. трудов ћеждунар. науч. конф: в 10 т.-“.7,секци€ 7/под общ. ред. ¬.—.Ѕалакирева.-“амбов: “амб. гос. техн. ун-т, 2002.Ц—.71-73.
61. Kirievskij Evgeny V. NeuralNetwork System for Measurement of Movement Plasma Parameters in ElectrodynamicRailgun//Proceedings of 2002 IEEE International Conference on ArtificialIntelligence Systems ICAISТ2002, 5-10 September 2002, Divnomorskoe // IEEE ComputerSociety, 2002.Ц –. 211Ц212.
62. ириевский ≈.¬.ћетоды искусственного интеллекта взадачах измерени€ параметров движени€ // “рудыћеждунар. науч.-техн. конф.Ђ»нтеллектуальные системы (IEEE AISТ03) и Ђ»нтеллектуальные —јѕ–ї (CAD-2003): в 3-х т. Ц ћ.: »зд-во физ.-мат.лит., 2003. Ц“.1. Ц —.293Ц308.
63. ириевский ≈.¬. онтроль параметров движени€ сиспользованием методов искусственногоинтеллекта//ћатематические методы втехнике и технологи€х Ц ћћ““-17: сб. тр.XVII ћеждунар. науч. конф.:в 10 т.Ц“.6, секции 6, 13.≠- острома: »зд-во остром. гос.технол. ун-та, 2004. Ц —.57Ц60.
64. ириевский≈.¬., январев —.√. —истема измерени€параметров движени€ тела на базе двухнейросетей с раздельными режимамиобучени€//“руды ћеждунар. науч-техн.конф. Ђ»нтеллектуальные системыї (IEEE AISТ04) и Ђ»нтеллектуальные —јѕ–ї(CAD-2004): в 3-хт.-ћ.:»зд.-во физ.-мат. лит.,2004.-“.1.-—.360-363.
65. ириевский ≈.¬., январев —.√. јнализалгоритмов управлени€ разгономтела в магнито-
плазменномэлектродинамическом ускорителе//»зв.вузов. —ев.- авк. регион. “ехн. науки. Ц 2008. Ц є 3. Ц —. 58 -62.
–” ќѕ»—»,ƒ≈ѕќЌ»–ќ¬јЌЌџ≈ ¬ ¬»Ќ»“»
66. ириевский ≈.¬.ћатематическое моделированиеэлектромагнитного пол€ движущегос€плазменного поршн€ в каналеэлектродинамического ускорител€ масс /ёж.-–ос. гос. техн. ун-т.-Ќовочеркасск,2003.Ц 15 с. -ƒеп. в ¬»Ќ»“» 13.05.2003, є 917-¬2003.
67. ириевский ≈.¬.ќбзор методов и средств измерени€ скоростиразгона тел в магнитоплазменном ускорителемасс / ёж.-–ос. гос. техн. ун-т.-Ќовочеркасск,2003.Ц41с.Ц ƒеп. ⬻Ќ»“»18.02.2003, є321-¬2003.
—¬»ƒ≈“≈Ћ№—“¬ј ќЅќ“–ј—Ћ≈¬ќ… –≈√»—“–ј÷»» ѕ–ќ√–јћћ ƒЋяЁ¬ћ
68. ириевский ¬.≈., ириевский ≈.¬. ћногокритериальный нечеткийранговый анализ вари-
антов FuzzyRAV 1.0 (Fuzzy Rank Analysis of Versions): свид.-во оботрасл. регистрации разработки.Ц є √– ¬Ќ“»÷ 50200501457от 14.10.2005.
69. ириевский ¬. ≈., ириевский ≈. ¬. —истема моделировани€процессов измерени€ скоро-
сти вэлектродинамическом ускорителе:свид-во об официальнойрегистрации программы дл€ Ё¬ћ є 2000611373 –ос.‘едераци€. Ц«арег. в –еестре программ дл€ Ё¬ћ 25.12.2000.
70. ириевский ¬.≈., ириевский ≈.¬. ћногокритериальныйнечеткий ранговый анализ вариантов:свидетельство є5266 об отраслевойрегистрации разработки/‘едеральноеагентство по образованию; √ос. корд. ÷ентр информ.технологий; ќтраслевой фонд алгоритмов ипрограмм.Ц«арег. 07.10.2005.
ј¬“ќ–— »≈—¬»ƒ≈“≈Ћ№—“¬ј » ѕј“≈Ќ“џЌј »«ќЅ–≈“≈Ќ»я
71. ј.с. 661354 ———–, ћ »G01R. —пособ измерени€больших посто€нных токов в шинахпр€моугольного сечени€ / ириевский ≈.¬.,∆уковский ё.√., ирь€ков ј.ћ., ћихайлов ¬.¬.,‘оменко √.ѕ.Ц ќпубл. 1979,Ѕюл. є17.
72. ј.с. 1004895 ———–, ћ »G01R. ƒатчик тока / ириевский ≈.¬., алинин ».». Ц ќпубл.1983, Ѕюл.є20.
73. ј.с. по за€вкеє†4866978; приоритет 20.08.90. —пособ измерени€скорости движени€ объекта / ириевский ≈.¬., алинин ».»., —едых ј.».
74. ј.с. 1569714 ———–, ћ »G 01 – 3/67.”стройство дл€ измерени€ скоростилинейного перемещени€ объекта / ≈.¬. ириевский,ј.ј. ћихайлов. Ц ќпубл. 1990, Ѕюл. є 21.
75. ј.с. 1583846 ———–,ћ » G 01– 3/67.—пособ измерени€ скорости движени€объекта / ≈.¬. ириевский, ј.ј.ћихайлов, ј.».—едых. Ц ќпубл. 1990, Ѕюл. є 29.
76. ј.с. 1615618 ———–,G01–3/489.†”стройство дл€ измерени€скорости перемещени€/ ≈.¬. ириевский,ј.ј.ћихайлов Ц ќпубл. 1990, Ѕюл. є 47.
77.ј.c. 1661644 ———–,G01–3/36.†”стройство дл€ измерени€скорости линейного перемещени€ объекта/ ≈.¬. ириевский, ј.ј.ћихайлов Ц ќпубл. 1991, Ѕюл. є25.
78.ј.c. 1672377———–, ћ » G 01– 3/64. —пособ и устройствоизмерени€ ско≠рости движени€ объекта / ≈.¬. ириевский, ј.ј.ћихайлов, ј.».—едых. Ц ќпубл. 1991, Ѕюл.є 31.
79.ј.с. 1672378 ———–, ћ » G 01– 3/64. —пособ и устройствоизмерени€ скорости движени€ объекта / ≈.¬. ириевский, ј.ј. ћихайлов, ј.». —едых. Ц ќпубл. 1991,Ѕюл. є 31.
80. ј.с. 1732281 ———–,G01– 3/489.†”стройство дл€ измерени€ скоростиперемещени€/ ≈.¬. ириевский, ј.ј. ћихайлов,ј.». —едых. Ц ќпубл. 1992, Ѕюл. є 17.
81. ј.с. 1744652 ———–,ћ » G01P 3/64. —пособизмерени€ скорости движени€ объекта / ≈.¬. ириевский. Ц ќпубл. 1992, Ѕюл.є24.
82. ѕат.1818588 –‘, ћ » 6G01P 3/64. —пособ измерени€ скорости движени€объекта / ≈.¬. ириевский, ¬.¬. ƒолгих, ј.».—едых и др. Цќпубл. 1993, Ѕюл. є20.
83. ј.с. 1817027 ———–,ћ » G01P 3/64. —пособизмерени€ скорости движени€ объекта / ≈.¬. ириевский, ».». алинин, ј.». —едых. Ц ќпубл. 1993, Ѕюл.є19.
84. ѕат. 2117309 –‘, ћ » 6G01P 3/64. —пособ диагностики электрическогокоммутационного аппарата (его варианты) /¬.¬. ƒолгих, ≈.¬. ириевский, ѕ.¬. ƒолгих и др.Ц ќпубл.1998, Ѕюл. є22.
85.ѕат. 2130620 –‘, ћ » 6 GO1R. —пособ коррекциисистематической погрешности измерительногопреобразовател€ с параметрическимдатчиком/ ириевский ≈.¬., ƒолгих ¬.¬. Ц ќпубл.1999, Ѕюл. є14.
86. ѕат.2134424 –‘, ћ » 6 GO1R. —пособ коррекциисистематической погрешности измерительногопреобразовател€ с параметрическимдатчиком/ ириевский ≈.¬., ƒолгих ¬.¬.Ц ќпубл.1999, Ѕюл. є22.
87. ѕат.2169926 –‘, ћ » 7 GO1P3/64. —пособ измерени€ скорости движени€объекта и устройство дл€ егореализации/ ириевский ¬.≈., ириевский ≈.¬.,ўедрин ¬.Ќ.Цќпубл. 2001, Ѕюл.є 18.
88. ѕат.2172960 –‘, ћ » 7 GO1P3/64. —пособ измерени€ скорости движени€объекта и устройство дл€ егореализации./ ириевский ¬.≈., ириевский ≈.¬.,ўедрин ¬.Ќ.- ќпубл. 2001,Ѕюл.є 24.
89.ѕат. 2189600 –‘, ћ » 7 GO1P. —пособ измерени€линейной скорости локомотива / ириевский ≈.¬.,«арифь€н ј.ј., олпахчь€н ѕ.√., январев —.√.Ц ќпубл. 2002,Ѕюл. є 26.
90. ѕат. 2189599 –‘,ћ » 7 GO1P. —пособ измерени€ линейнойскорости локомотива / ириевский ≈.¬.,«арифь€н ј.ј., олпахчь€н ѕ.√., январев—.√.Ц ќпубл.2002, Ѕюл. є 26.
91. ѕат. 2199753 –‘,ћ » 7 GO1P3/64. —пособ измерени€ скорости движени€объекта / ириевский ≈.¬., январев —.√. Ц ќпубл. 2003, Ѕюл. є6.
92. ѕат. 2208793 –‘.ћ » 7 GO1P3/50. —пособ измерени€ скорости движени€проводника с током / ириевский ≈.¬.,январев —.√. Ц ќпубл. 2003, Ѕюл. є 20.
93. ѕат. 2208794 –‘, ћ »G01P 3/64. —пособизмерени€ скорости линейного перемещени€объекта / ириевский ≈.¬., ћихайлов ј.ј., ириевский ¬.≈. и др. Ц ќпубл. 2003, Ѕюл.є20.
Ћичный вкладавтора в опубликованных всоавторстве работах: [1-16, 19-21, 23, 27, 30-39, 41, 43-51,53-59, 64, 68, 71-93] Ц постановка задачи, основна€ иде€ ианализ результатов; [3-5, 7-9, 12, 13, 19, 21, 23, 31, 32, 36, 38, 41]Ц выводматематических соотношений; [2, 4, 7, 9, 13-16, 19-21,23, 27, 30-, 32, 34, 36, 38, 41, 43, 50, 51, 53, 57-59, 64, 68, 71-93]Цразработка принципов и алгоритмов; [2, 14, 27, 31, 32, 35,43, 50, 57, 58] Цразработка нового метода измерени€; [16, 30-32,34, 42, 53, 69] Цпостроениематематической модели; [2, 4, 14, 20, 21, 37, 38, 53, 57,58] Цразработка новых технических решений; [30-32]Цвыполнение вычислительного эксперимента.
¬ журналах,рекомендованных ¬ј –‘,опубликована 31 стать€ [2-32].
Ѕез соавторов опубликовано 18 работ [1, 17, 18, 22, 24-26,28, 29, 40, 52, 60-63, 66, 67, 81], в том числе 8 статейв журналах, рекомендованных ¬ј –‘ [17, 18,22, 24-26, 28, 29].
ириевский ≈вгений¬ладимирович
ћ≈“ќƒџ » —–≈ƒ—“¬ј»«ћ≈–»“≈Ћ№Ќќ√ќ ѕ–≈ќЅ–ј«ќ¬јЌ»я
— ќ–ќ—“» ƒ¬»∆≈Ќ»яѕЋј«ћџ ƒЋя»Ќ‘ќ–ћј÷»ќЌЌќ-»«ћ≈–»“≈Ћ№Ќџ’
» ”ѕ–ј¬Ћяёў»’ —»—“≈ћ ЁЋ≈ “–ќƒ»Ќјћ»„≈— »’”— ќ–»“≈Ћ≈…
јвтореферат
________________________________________________________________
ѕодписано в печатьЕЕЕЕ 2008.
‘ормат 60х84 1/16. Ѕумагаофсетна€. –изографи€.
”сл. печ. л. 2,0 ”ч.-изд.л. Е. “ираж 120 экз. «аказ Е..
_________________________________________________________________
»здательство ё–√“”(Ќѕ»)
346428, г. Ќовочеркасск,ул. ѕросвещени€, 132
“ел., факс (863-52) 5-53-03E-mail: [email protected]