

Алгоритмы управления прохождением через зону резонанса в мехатронных вибрационных установках
РОССИЙСКАЯ АКАДЕМИЯ НАУК
Институт проблем машиноведения РАН
На правах рукописи
Томчин Дмитрий Александрович
АЛГОРИТМЫ УПРАВЛЕНИЯ ПРОХОЖДЕНИЕМ
ЧЕРЕЗ ЗОНУ РЕЗОНАНСА В МЕХАТРОННЫХ
ВИБРАЦИОННЫХ УСТАНОВКАХ
Специальность 05.11.16 Информационно-измерительные и
управляющие системы (в машиностроении)
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
кандидата технических наук
Санкт-Петербург — 2006
Работа выполнена в Институте проблем машиноведения
Российской академии наук (ИПМаш РАН)
Научный руководитель: доктор технических наук, профессор
Фрадков Александр Львович
Официальные оппоненты: доктор технических наук., профессор
Городецкий Андрей Емельянович
Кандидат технических наук, доцент
Гаврилов Сергей Викторович
Ведущее предприятие:
Санкт-Петербургский Университет информационных технологий,
механики и оптики (СПбГУИТМО)
Защита состоится “____” ______________ 2006 г. в _____ час. ____ мин.
На заседании диссертационного совета Д 002.075.01 при Институте проблем машиноведения РАН по адресу: 199178, Санкт-Петербург, Большой пр. В.О., д. 61, ИПМаш РАН
С диссертацией можно ознакомиться в ОНТИ ИПМаш РАН
Автореферат разослан “____” ______________ 2006 г.
Ученый секретарь диссертационного совета,
доктор технических наук В.В. Дубаренко
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность темы. Современный этап развития машиностроения характеризуется широким применением средств информатики и вычислительной техники и новых информационных технологий при построении машин и установок на всех этапах: от проектирования до эксплуатации. Современные машины все чаще оснащаются реализованными на компьютерах информационно-измерительной и управляющей подсистемами. Информационно-измерительная подсистема позволяет оперативно решать задачи оценки состояния, диагностики неисправностей машины, а управляющая подсистема позволяет реализовать сложные алгоритмы управления, обеспечивающие существенное повышение качества, надежности и экономичности работы установки. Необходимость тесного взаимодействия методов механики, электроники, вычислительной техники и теории управления при проектировании машин привела к появлению новой отрасли науки – мехатроники, изучающей процессы создания и функционирования сложных компьютерно-управляемых механических систем.
Широкие перспективы открывает использование элементов мехатроники при проектировании современных вибрационных установок. Вопросы анализа и синтеза алгоритмов управления колебательными режимами рассматривались в работах Л.Д. Акуленко, Б.Р. Андриевского, В.К. Асташева, В.И. Бабицкого, И.И. Блехмана, А.Л. Фрадкова, К.В. Фролова, Ф.Л. Черноусько, В.М.Шестакова и др. Одной из важных задач управления мехатронными вибрационными установками является обеспечение прохождения через зону резонанса при пуске и разгоне вибровозбудителей, когда область рабочих режимов находится в зарезонансной зоне. Эта задача возникает, если мощность двигателя недостаточна для прохождения через зону резонанса в связи с проявлением эффекта Зоммерфельда. Перспективный подход к решению основан на применении алгоритмов управления с обратной связью по результатам измерений. Для практической реализации важно разработать алгоритмы управления прохождением через зону резонанса, обладающие свойством робастности: сохранения высокого качества системы при изменении параметров объекта (установки) и внешних условий, прежде всего изменения нагрузки.
Алгоритмы управления прохождением зоны резонанса механических систем рассматривались в работах М.Е.Герца, В.В.Гортинского, А.С.Кельзона, Л.М.Малинина, А.А.Первозванского и др. Однако предложенные ранее алгоритмы не обладали достаточной робастностью в условиях неопределенности и отличались сложностью расчета при проектировании. В ряде работ для синтеза алгоритмов управления использовался метод скоростного градиента, предложенный А.Л. Фрадковым в 1979г. Однако в известных работах рассматривались лишь задачи, в которых несущее тело совершает одномерное движение.
На этапах предпроектных исследований, проектирования и разработки мехатронных установок, а также при подготовке специалистов в области мехатроники важнейшую роль играют современные информационные технологии. В частности, эффективным инструментом исследования являются так называемые виртуальные лаборатории – интерактивные сайты, зайдя на которые, обучающийся или исследователь может самостоятельно не только получать необходимые теоретические сведения, но и выполнять моделирование и анализ установок, а также настройку разработанных алгоритмов управления, т.е. проводить дистанционные вычислительные эксперименты. Подобные лаборатории интенсивно разрабатываются в ведущих университетах многих стран, однако в области систем управления в настоящее время известен лишь ряд зарубежных сайтов, а русскоязычные виртуальные лаборатории практически отсутствуют.
Использование Интернет-технологий позволяет существенно ускорить поиск и сбор информации, необходимой разработчику систем управления. Хотя в Интернете содержится огромное количество информационных ресурсов по всем отраслям знаний, поиск их, как правило, затруднен, и часто дополнительные временные затраты сводят на нет преимущества использования информации, извлеченной из сетевых источников. Выходом является использование специализированных информационных сайтов: Интернет-порталов, Интернет-архивов, аккумулирующих ссылки на известные ресурсы по данной специальности. В области систем управления в мире имеется всего несколько подобных информационных сайтов, а на русском языке до 2000г. не имелось ни одного.
Цель и задачи работы. Целью диссертационной работы является разработка новых алгоритмов управления прохождением через зону резонанса для однороторных и двухроторных вибрационных установок, а также разработка прототипа виртуальной лаборатории для исследования динамики синтезированных систем управления. Исходя из поставленной цели, в работе решаются следующие задачи.
1. Постановка задачи управления прохождением через зону резонанса для механических систем с несколькими степенями свободы и разработка алгоритмов управления в случае, когда несущее тело совершает не одномерные движения, а колебания в плоскости.
2. Исследование работоспособности разработанных алгоритмов, получение рекомендаций по выбору настроечных параметров алгоритмов и оценок робастности синтезированных систем.
3. Разработка прототипа виртуальной лаборатории для дистанционного анализа алгоритмов управления и информационного Интернет-портала для поддержки создания новых систем управления и систем мехатроники.
Методы исследования. В работе использованы методы линейной и нелинейной теории управления, методы математического и компьютерного моделирования, методики JAVA-технологии и веб-дизайна.
Научная новизна. В работе получены следующие новые научные положения, выносимые на защиту.
1. Впервые предложена постановка задачи управления прохождением через резонанс как задачи управления энергией вращающейся подсистемы механической системы при ограничении на величину энергии несущей подсистемы.
2. Предложены новые алгоритмы управления прохождением через зону резонанса для нескольких типовых задач: управление разгоном ротора на упругом валу, управление однороторной и двухроторной вибрационными установками.
3. Разработаны рекомендации по выбору настроечных параметров алгоритмов и впервые даны качественные оценки робастности синтезированных систем.
Практическая значимость. На основе полученных результатов разработано программное обеспечение виртуальной лаборатории для исследования прохождения через резонанс в случае однороторного вибрационного стенда. Разработана информационная структура и программное обеспечение Интернет-портала РУСИКОН – Российского архива по системам и управлению, обеспечивающего информационную поддержку Интернет-технологии разработки систем управления. Разработанные методы управления и информационные системы позволяют повысить качество систем управления мехатронными вибрационными установками, сократить сроки их разработки, повысить уровень подготовки специалистов.
Реализация результатов работы. Разработанные алгоритмы управления прохождением через резонанс для двухроторного мехатронного вибрационного стенда и виртуальная лаборатория исследования прохождения через резонанс для однороторного вибрационного стенда использованы в разработках Санкт-Петербургского учебно-научного центра "Проблемы машиностроения, механики и процессов управления". Виртуальная лабораторная работа «Управление однороторным вибрационным стендом» вошла в состав центра коллективного пользования «Мехатронные и мобильные комплексы» и размещена в Интернете по адресу http://www.ipme.ru/ipme/labs/ccs/virtlab/. Алгоритмы управления прохождением через резонанс для гибкого вала использованы в совместных разработках ИПМаш РАН и НПО "Механобр-техника" по перспективным вибрационным установкам, выполняемым в рамках программы комплексных исследований Президиума РАН "Управление механическими системами и мехатроника".
Интернет-портал РУСИКОН размещен по адресу http://www.rusycon.ru и успешно функционирует с 1999 года. За это время зарегистрировано более 130000 посещений, а в 2004-2005гг архив посещало в среднем 2000 посетителей в месяц.
Работа выполнялась по планам госбюджетных НИР ИПМаш РАН (гос.рег. №№ 01.200.201870), по проектам ФЦП «Интеграция» (A0151, Б-0026) по программе Президиума РАН №19 "Управление механическими системами и мехатроника", по грантам РФФИ (проекты 99-01-00672, 02-01-00765, 05-01-00869).
Апробация работы. Результаты диссертации доложены и обсуждены на семинарах лаборатории "Управление сложными системами ИПМаш РАН", на конференциях «20-я европейская конференция по моделированию», 2006 г., Бонн; «16-й Всемирный конгресс Международной федерации по автоматическому управлению», 2005 г., Прага; «2-я международная конференция "Физика и управление"», 2005 г., С.-Петербург; «6-й Симпозиум ИФАК по нелинейным системам управления», 2004 г., Штутгарт; «10-я международная студенческая олимпиада по автоматическому управлению», 2004 г., С.-Петербург; «4-я международная конференция "Средства математического моделирования"», 2003 г., С.-Петербург; 3-я и 4-я конференции молодых ученых "Навигация и управление движением"», 2001г, 2002 г., C.-Петербург; «Всероссийская объединенная конференция "Технологии информационного общества - Интернет и современное общество"», 2001 г., С.-Петербург.
Публикации. По теме диссертации опубликовано 12 работ, в том числе 2 статьи в журналах из перечня ВАК РФ.
Структура и объем работы. Диссертация состоит из пяти глав, первая из которых вводная, заключения и списка литературы, содержит 91 страницу текста.
СОДЕРЖАНИЕ ДИССЕРТАЦИИ
В первой главе, являющейся вводной, описано состояние проблемы управления прохождением через резонанс в вибрационных установках, обосновывается актуальность использования методов современной теории управления и информационных систем при проектировании новых образцов вибрационной техники.
Во второй главе описываются математические модели динамики нескольких типовых схем вибрационных систем, необходимых для разработки и исследования алгоритмов управления прохождением через зону резонанса. Представлены уравнения динамики вращающегося вала с неуравновешенным ротором, однороторного вибрационного стенда и двухроторного вибрационного стенда.
Третья глава, в которой приведены основные результаты работы, посвящена синтезу и исследованию алгоритмов управления прохождением через зону резонанса. Предложена общая постановка задачи управления прохождением через резонанс как задачи управления энергией одной (возбуждающей вибрации) подсистемы при ограничении на энергию другой (несущей) подсистемы. Приводятся решения задач управления прохождением через зону резонанса для ряда систем, в которых носитель совершает одномерное и двумерное движение: неуравновешенным ротором, вращающимся на упругом валу; однороторным и двухроторным вибрационными стендами.
Постановка задачи и синтез базового алгоритма управления. На этапе синтеза предполагается, что объект управления - консервативная система, т.е. потери энергии в системе отсутствуют. Для описания динамики механической системы используются уравнения Лагранжа второго рода, приводящие к модели динамики объекта управления с n степенями свободы (без учета потерь) вида
![]() (1)
(1)
где ![]() - m-вектор управляющих воздействий (сил и моментов);
- m-вектор управляющих воздействий (сил и моментов); ![]() ,
, ![]() ,
, ![]() - n-векторы обобщенных координат, скоростей и ускорений соответственно; A(q) - nxn-матрица массоинерционных параметров; C(q, q) – n-вектор кориолисовых и центробежных сил; G(q) - п-вектор сил тяготения; В - nxm-матрица управления. Для синтеза алгоритмов управления оказывается более удобным записать уравнения в гамильтоновой форме:
- n-векторы обобщенных координат, скоростей и ускорений соответственно; A(q) - nxn-матрица массоинерционных параметров; C(q, q) – n-вектор кориолисовых и центробежных сил; G(q) - п-вектор сил тяготения; В - nxm-матрица управления. Для синтеза алгоритмов управления оказывается более удобным записать уравнения в гамильтоновой форме:
 (2)
(2)
где p = p(t) - вектор обобщенных импульсов; H = H(p,q) - гамильтониан, или полная энергия неуправляемой (свободной) системы.
Предполагается, что в модели динамики системы выделены две подсистемы: вращающаяся и несущая, так что полная энергия представляется в виде:
 ,
,
где H1 – энергия вращающейся подсистемы, H2 – энергия несущей подсистемы, H12 – энергия взаимодействия.
Задачу прохождения через резонанс предлагается сформулировать как задачу синтеза закона изменения управляющего воздействия (алгоритма управления), обеспечивающего достижение целевого значения энергии вращающейся подсистемы при ограничении на энергию колебаний несущей подсистемы на резонансных частотах. При этом базовый алгоритм управления синтезируется из условия достижения цели управления, а ограничения учитываются путем модификации алгоритма.
Для синтеза базового алгоритма применяется метод скоростного градиента (Фрадков, 1979, 1986). Формализуем цель управления как приближение к поверхности заданного уровня энергии вращающейся подсистемы (это соответствует заданным средним значениям угловых скоростей):
![]() при
при ![]() (3)
(3)
Если ввести целевую функцию
![]() , (4)
, (4)
то цель управления может быть переформулирована в виде
![]() при
при ![]() . (5)
. (5)
При выборе алгоритма скоростного градиента релейного типа в конечной форме, базовый алгоритм записывается в виде:
![]() , (6)
, (6)
где ![]() - коэффициент усиления - параметр алгоритма,
- коэффициент усиления - параметр алгоритма, ![]() – вектор угловых скоростей вращательного движения.
– вектор угловых скоростей вращательного движения.
Предлагаемый подход к решению задачи основан на использовании эффекта разделения движений на быстрые и медленные составляющие, возникающего вблизи зоны резонанса. Возникновение медленных «маятниковых» движений вблизи зоны резонанса при малом относительном эксцентриситете отмечалось в работах А.И.Нейштадта, А.А.Первозванского и Л.М.Малинина, А.В.Печенева и других. Для выделения медленных движений в алгоритм управления вводится фильтр нижних частот. Например, если медленная составляющая возникает в колебаниях угловой скорости ![]() , то вместо (6) используется алгоритм управления
, то вместо (6) используется алгоритм управления
 (7)
(7)
где – переменная фильтра, ![]() – постоянная времени фильтра. На основе алгоритма (7) разработаны алгоритмы прохождения через зону резонанса для перечисленных выше трех моделей.
– постоянная времени фильтра. На основе алгоритма (7) разработаны алгоритмы прохождения через зону резонанса для перечисленных выше трех моделей.
Управление прохождением через резонанс упругого вала. Рассматривается задача управления изгибными колебаниями вращающегося вала с неуравновешенным диском (ротором) посередине (см. Рис. 1). Пренебрегая углами отклонения ротора от плоскости, перпендикулярной валу, получим дифференциальные уравнения, описывающие плоское движение центра масс и вращение ротора в виде
![]()
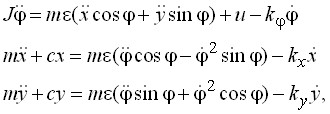 (8)
(8)
где - угол вращения ротора, x,y – декартовы координаты центра масс ротора, u=![]() – управляющее воздействие (вращающий момент на валу двигателя), J – момент инерции неуравновешенного ротора (относительно центра масс), m - масса ротора, - эксцентриситет центра масс ротора, c - жесткость вала на изгиб,
– управляющее воздействие (вращающий момент на валу двигателя), J – момент инерции неуравновешенного ротора (относительно центра масс), m - масса ротора, - эксцентриситет центра масс ротора, c - жесткость вала на изгиб, ![]() - соответствующие коэффициенты демпфирования,
- соответствующие коэффициенты демпфирования, ![]() - коэффициент вязкого трения в подшипнике.
- коэффициент вязкого трения в подшипнике.
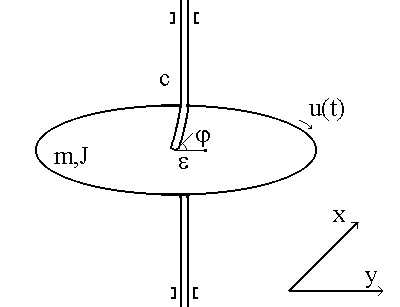
Рис. 1. Схема вращающегося упругого вала с неуравновешенным ротором.
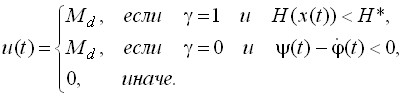
Цель управления соответствует обеспечению разгона дебалансного вибровозбудителя до скоростей, больших, чем критические резонансные, при ограничениях как на размах изгибных колебаний вала, так и на уровень управляющего сигнала ![]() , где
, где ![]() . Предполагается, что измерению доступны все переменные состояния системы и требуется найти алгоритм управления в виде
. Предполагается, что измерению доступны все переменные состояния системы и требуется найти алгоритм управления в виде ![]() , где
, где ![]() - вектор состояния объекта управления.
- вектор состояния объекта управления.
Вблизи зоны резонанса размах колебаний центра масс возрастает, и, как следует из результатов Л.М.Малинина и А.А.Первозванского, при малом относительном эксцентриситете движение центра масс разделяется на быструю и медленную составляющую, причем медленная составляющая описывается уравнением второго порядка ![]() где
где ![]() - усредненное отклонение от равновесного значения квадрата радиус-вектора центра масс
- усредненное отклонение от равновесного значения квадрата радиус-вектора центра масс ![]() . Дальнейшему увеличению скорости вращения ротора препятствует перетекание энергии вращения ротора в энергию колебательного движения центра масс. Для решения задачи предлагается увеличивать энергию вращательного движения путем увеличения энергии медленного движения. При этом для управления энергией медленного движения используется метод скоростного градиента с энергетической целевой функцией, а для подавления быстрых составляющих в алгоритм вводится фильтр нижних частот.
. Дальнейшему увеличению скорости вращения ротора препятствует перетекание энергии вращения ротора в энергию колебательного движения центра масс. Для решения задачи предлагается увеличивать энергию вращательного движения путем увеличения энергии медленного движения. При этом для управления энергией медленного движения используется метод скоростного градиента с энергетической целевой функцией, а для подавления быстрых составляющих в алгоритм вводится фильтр нижних частот.
Предлагаемая модификация релейного алгоритма управления (7) имеет вид:
 (9)
(9)
где вспомогательная переменная ![]() оценивает средний квадрат амплитуды колебаний вала, постоянная времени
оценивает средний квадрат амплитуды колебаний вала, постоянная времени ![]() фильтра для
фильтра для ![]() - параметр алгоритма. Из установленного свойства величины
- параметр алгоритма. Из установленного свойства величины ![]() следует, что если система находится в зоне резонанса (не было зафиксировано значительное снижение
следует, что если система находится в зоне резонанса (не было зафиксировано значительное снижение ![]() ), то
), то ![]() , в противном случае
, в противном случае ![]() . Параметр алгоритма K<1 должен быть достаточно мал, чтобы можно было с уверенностью фиксировать прохождение зоны резонанса. Постоянная времени фильтра угловой скорости
. Параметр алгоритма K<1 должен быть достаточно мал, чтобы можно было с уверенностью фиксировать прохождение зоны резонанса. Постоянная времени фильтра угловой скорости ![]() выбирается в промежутке между периодом резонансных колебаний и периодом медленных колебаний системы.
выбирается в промежутке между периодом резонансных колебаний и периодом медленных колебаний системы.
Проведено численное иccледование эффективности предложенного алгоритма при различных значениях параметров системы и алгоритма. При моделировании в программной среде MATLAB номинальные значения параметров объекта управления выбирались следующим образом: J = 0.014 кг·м2, m = 1.5 кг, = 0.02 м, ![]() = 0.02 Дж·с,
= 0.02 Дж·с, ![]() Н/м,
Н/м, ![]() кг/с. Результаты моделирования, приведенные на рис. 2 показывают, что применение разработанного алгоритма при номинальных параметрах объекта позволяет понизить необходимое значение управляющего момента электродвигателя в 1.35 раза. Было проведено численное исследование зависимости эффективности управления от параметров объекта и алгоритма управления. В каждой серии экспериментов определялись
кг/с. Результаты моделирования, приведенные на рис. 2 показывают, что применение разработанного алгоритма при номинальных параметрах объекта позволяет понизить необходимое значение управляющего момента электродвигателя в 1.35 раза. Было проведено численное исследование зависимости эффективности управления от параметров объекта и алгоритма управления. В каждой серии экспериментов определялись
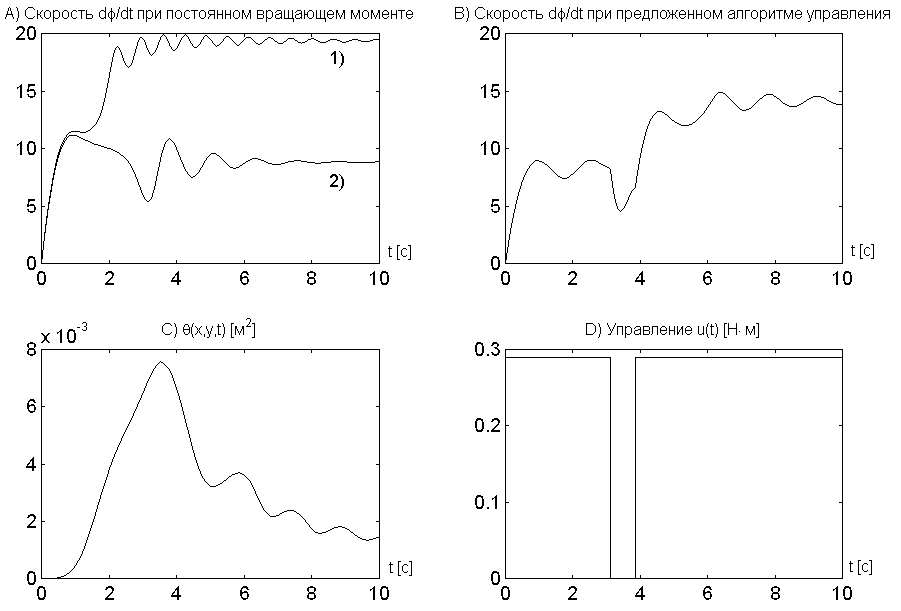
Рис. 2. A) Прохождение зоны резонанса при постоянном управляющем воздействии: 1) ![]() - захват 2)
- захват 2) ![]() - прохождение. B),C),D) - Прохождение зоны резонанса при использовании алгоритма управления (9),
- прохождение. B),C),D) - Прохождение зоны резонанса при использовании алгоритма управления (9), ![]() - прохождение.
- прохождение.
минимальное значение постоянного вращающего момента двигателя ![]() , обеспечивающее прохождение зоны резонанса при
, обеспечивающее прохождение зоны резонанса при ![]() , и минимальное значение вращающего момента двигателя
, и минимальное значение вращающего момента двигателя ![]() , обеспечивающее прохождение зоны резонанса при использовании алгоритма управления (9). Постоянная времени фильтра угловой скорости
, обеспечивающее прохождение зоны резонанса при использовании алгоритма управления (9). Постоянная времени фильтра угловой скорости ![]() варьировалась в диапазоне от 0.1 до 1.1 секунды. На рис.3 изображены графики зависимости величин M1, M2 от жесткости вала на кручение c, коэффициента сопротивления вращению
варьировалась в диапазоне от 0.1 до 1.1 секунды. На рис.3 изображены графики зависимости величин M1, M2 от жесткости вала на кручение c, коэффициента сопротивления вращению ![]() , эксцентриситета. Из графиков видно, что в зависимости от параметров системы, за счет применения алгоритма значение управляющего момента можно снизить в 3-8 раз.
, эксцентриситета. Из графиков видно, что в зависимости от параметров системы, за счет применения алгоритма значение управляющего момента можно снизить в 3-8 раз.
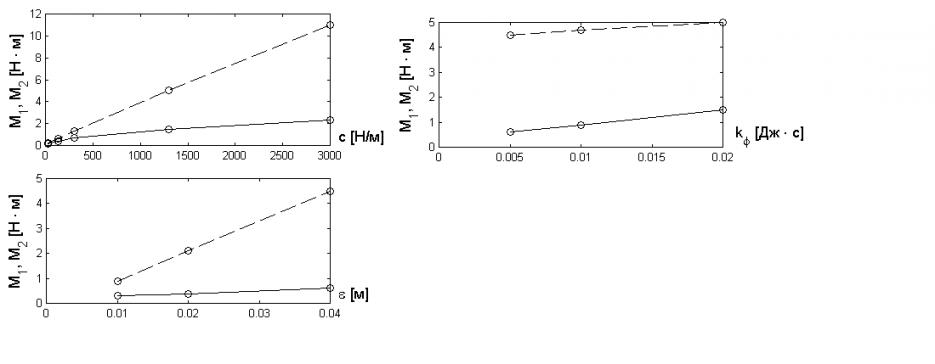
Рис.3. Влияние жесткости вала c, коэффициента сопротивления вращению ![]() , эксцентриситета на эффективность работы алгоритма управления.
, эксцентриситета на эффективность работы алгоритма управления.
Далее исследовалась робастность алгоритма при изменении жесткости вала на кручение c и при номинальных значениях остальных параметров объекта. Исследования показали, что выбор коэффициентов алгоритма ![]() с,
с, ![]() позволяет достичь удовлетворительных результатов, описанных ранее. Показано, что алгоритм обладает значительной робастностью: при изменении жесткости с от 30 до 3000 H/м постоянное значение
позволяет достичь удовлетворительных результатов, описанных ранее. Показано, что алгоритм обладает значительной робастностью: при изменении жесткости с от 30 до 3000 H/м постоянное значение ![]() = 0.45 с обеспечивает эффективность алгоритма не меньше 65% от эффективности при подборе
= 0.45 с обеспечивает эффективность алгоритма не меньше 65% от эффективности при подборе ![]() для каждого значения жесткости.
для каждого значения жесткости.
Управление прохождением через резонанс однороторной вибрационной установки (Рис. 4). Уравнения динамики системы имеют вид
 (10)
(10)
где ![]() – угол поворота ротора, y – вертикальное отклонение центра масс платформы от положения равновесия,
– угол поворота ротора, y – вертикальное отклонение центра масс платформы от положения равновесия, ![]() –управляющее воздействие (момент приводного электродвигателя), J – момент инерции несбалансированного ротора, m – масса ротора, M – масса платформы,
–управляющее воздействие (момент приводного электродвигателя), J – момент инерции несбалансированного ротора, m – масса ротора, M – масса платформы, ![]() – эксцентриситет центра масс ротора,
– эксцентриситет центра масс ротора, ![]() - осевая жесткость пружин,
- осевая жесткость пружин, ![]() - суммарное осевое демпфирование пружин,
- суммарное осевое демпфирование пружин, ![]() - коэффициент вязкого трения.
- коэффициент вязкого трения.
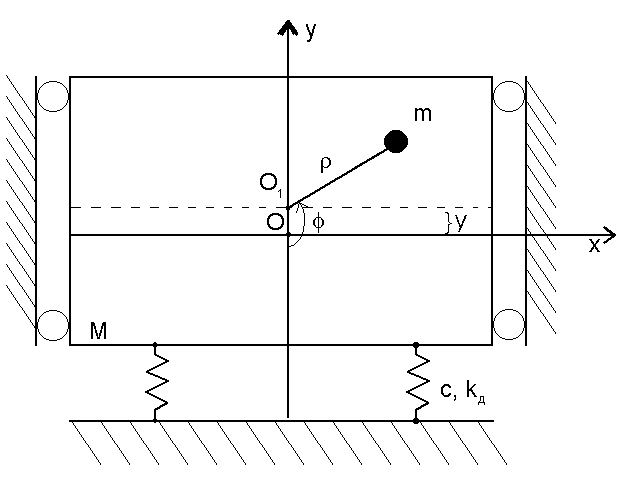
Рис. 4. Однороторная вибрационная установка
Вектор состояния системы имеет вид ![]() . Система имеет две степени свободы: одномерные колебания платформы и вращение ротора. При малых уровнях управляющего воздействия в околорезонансной области происходит «захват» угловой скорости ротора, а при увеличении управляющего момента ротор проходит зону резонанса и разгоняется до заданной угловой скорости.
. Система имеет две степени свободы: одномерные колебания платформы и вращение ротора. При малых уровнях управляющего воздействия в околорезонансной области происходит «захват» угловой скорости ротора, а при увеличении управляющего момента ротор проходит зону резонанса и разгоняется до заданной угловой скорости.
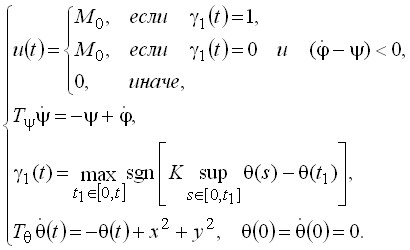
В соответствии с базовым алгоритмом (7), был разработан алгоритм управления:
 (11)
(11)
где
![]() (12)
(12)
sgn [z] = 1 при z > 0, sgn [z] = 0 при z 0.
Результаты моделирования для номинальных параметров системы, соответствующих реальной вибрационной установке, разработанной в Санкт-Петербургском УНЦ «Проблемы механики, машиностроения и процессов управления», приведены на рис 5. Видно, что применение разработанного алгоритма позволяет понизить в 2.5 раза значение управляющего момента электродвигателя, необходимое для выхода в область рабочих скоростей.
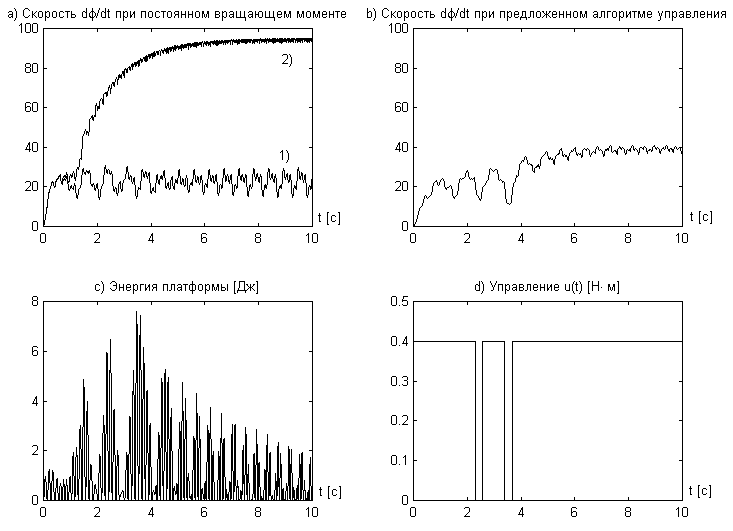
Рис. 5. а) Прохождение зоны резонанса при постоянном управляющем воздействии ![]() . (1:
. (1: ![]() - захват; 2:
- захват; 2: ![]() - прохождение); b),c),d) Прохождение зоны резонанса с алгоритмом (11), (12),
- прохождение); b),c),d) Прохождение зоны резонанса с алгоритмом (11), (12), ![]() .
.
Алгоритм управления прохождением через резонанс двухроторной вибрационной установки. В работе рассмотрена задача разгона и прохождения через зону резонанса для вибрационной установки с двумя вибровозбудителями, установленными на несущем теле, упруго соединенном с неподвижным основанием (Рис.6). Установка разработана в Санкт-Петербургском УНЦ «Проблемы механики, машиностроения и процессов управления» в рамках Федеральной целевой программы «Интеграция».
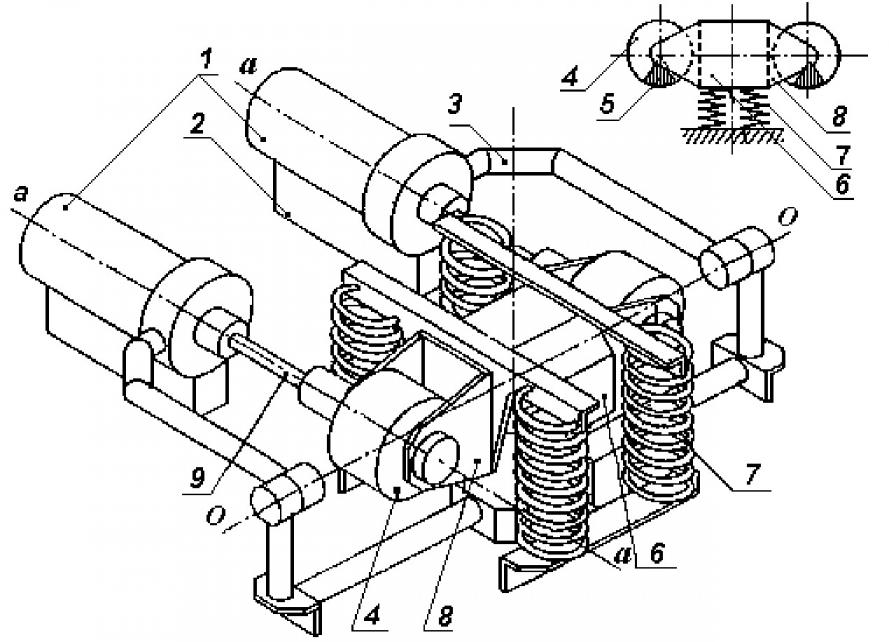

Рис. 6. Схема двухроторной вибрационной установки. 1- приводные электродвигатели; 2- блоки датчиков; 3- рама стенда; 4- роторы; 5- дебалансы; 6- вибрационный корпус; 7- пружинные виброизоляторы; 8- вилки вибровозбудителей; 9- карданные валы.
Пренебрегая динамикой угла поворота носителя (это возможно при достаточно высокой жесткости пружин), считаем, что носитель ориентирован горизонтально и совершает плоско-параллельное движение в вертикальной плоскости (см. рис. 7):
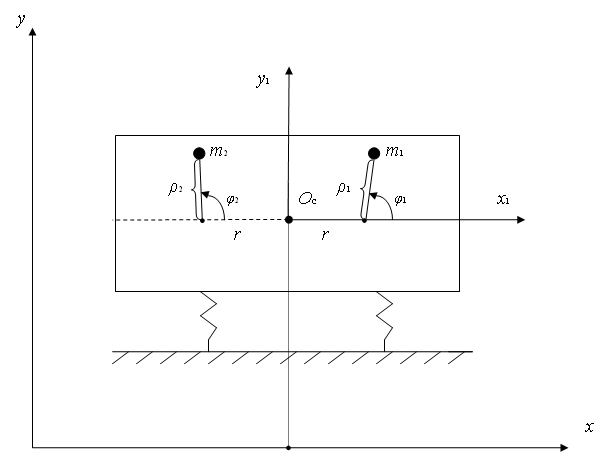
Рис.7. Расчетная схема двухроторной вибрационной установки с горизонтальной ориентацией носителя
Уравнения динамики системы имеют вид:
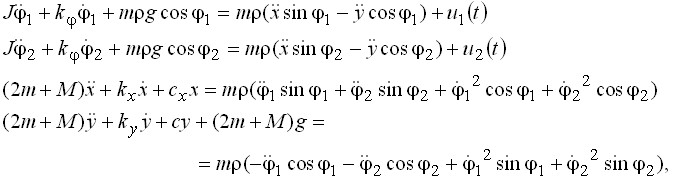
![]() (13)
(13)
где ![]() – углы поворота роторов, x, y – горизонтальное и вертикальное отклонения центра масс носителя от положения равновесия,
– углы поворота роторов, x, y – горизонтальное и вертикальное отклонения центра масс носителя от положения равновесия, ![]() – управляющие воздействия (вращающие моменты двигателей), J – момент инерции несбалансированных роторов, m – масса ротора, M – масса носителя,
– управляющие воздействия (вращающие моменты двигателей), J – момент инерции несбалансированных роторов, m – масса ротора, M – масса носителя, ![]() – эксцентриситеты центров масс роторов,
– эксцентриситеты центров масс роторов, ![]() - жесткость пружин по вертикальной и горизонтальной осям, соответственно,
- жесткость пружин по вертикальной и горизонтальной осям, соответственно, ![]() - коэффициенты демпфирования,
- коэффициенты демпфирования, ![]() - коэффициент вязкого трения.
- коэффициент вязкого трения.
В работе предложен алгоритм управления ![]() , где
, где ![]() - вектор состояния системы для разгона неуравновешенных роторов до прохождения зоны резонанса. Предполагается, что уровень управляющего воздействия ограничен и не позволяет пройти зону резонанса при постоянном воздействии. Синтезированный алгоритм прохождения через резонансные частоты имеет вид:
- вектор состояния системы для разгона неуравновешенных роторов до прохождения зоны резонанса. Предполагается, что уровень управляющего воздействия ограничен и не позволяет пройти зону резонанса при постоянном воздействии. Синтезированный алгоритм прохождения через резонансные частоты имеет вид:
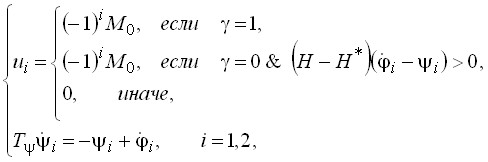 (14)
(14)
где
![]() (15)
(15)
sgn [z] = 1 при z > 0, sgn [z] = 0 при z 0.
Эффективность предложенного алгоритма исследовалась в среде MATLAB. Расчеты проводились для базовых параметров системы J = 0.014 [кг·м2], m = 1.5 [кг], M=9 [кг], = 0.04 [м], ![]() = 0.01 [Дж·с],
= 0.01 [Дж·с], ![]() [кг/с],
[кг/с], ![]() [Н/м],
[Н/м], ![]() [Н/м]. При этом наименьшее постоянное управляющее воздействие, обеспечивающее прохождение через зону резонанса, равняется 0.66 Н·м (см. рис.8a).
[Н/м]. При этом наименьшее постоянное управляющее воздействие, обеспечивающее прохождение через зону резонанса, равняется 0.66 Н·м (см. рис.8a).
Результаты моделирования показали, что минимальное значение управляющего момента ![]() , обеспечивающее прохождение зоны резонанса, равно
, обеспечивающее прохождение зоны резонанса, равно ![]() = 0.42 [Н·м] с точностью 0.01 [Н·м], см. Рис. 8b. По сравнению с постоянным управляющим воздействием, предложенный алгоритм позволяет уменьшить уровень управляющего воздействия в 1.5 раза. Показано, что значение
= 0.42 [Н·м] с точностью 0.01 [Н·м], см. Рис. 8b. По сравнению с постоянным управляющим воздействием, предложенный алгоритм позволяет уменьшить уровень управляющего воздействия в 1.5 раза. Показано, что значение ![]() слабо зависит от выбора
слабо зависит от выбора ![]() в пределах от 0.2 [c] до 0.6 [c].
в пределах от 0.2 [c] до 0.6 [c].
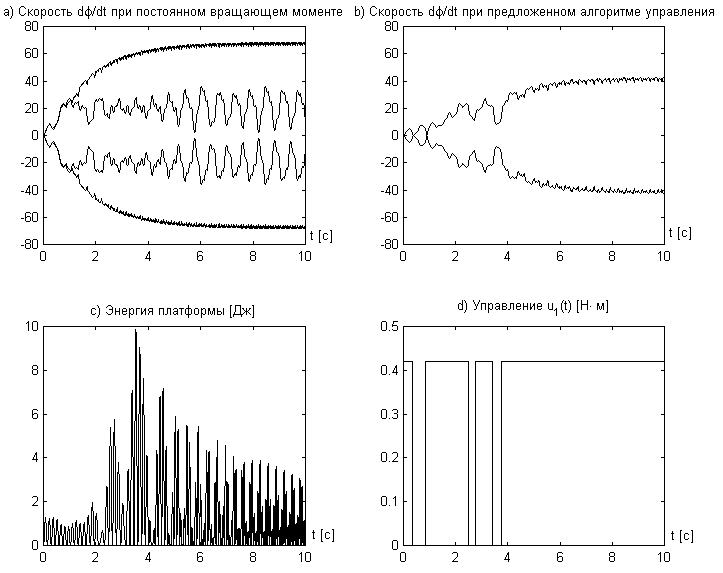
Рис. 8. а) Динамика системы при постоянном управляющем воздействии, ![]() ,
, ![]() = 0.65 [Н·м] (внутренние кривые, «захват») и
= 0.65 [Н·м] (внутренние кривые, «захват») и ![]() = 0.66 [Н·м] (внешние кривые, прохождение). b),c),d) Прохождение через резонанс с алгоритмом (14),
= 0.66 [Н·м] (внешние кривые, прохождение). b),c),d) Прохождение через резонанс с алгоритмом (14), ![]() = 0.45 [Н·м],
= 0.45 [Н·м], ![]() = 0.55 [с].
= 0.55 [с].
Далее было исследовано поведение системы при несимметричных начальных условиях. Показано, что асимметрия начальных условий слабо влияет на динамику процесса.
Таким образом, применение разработанного алгоритма управления позволяет почти в два раза снизить величину управляющего момента, требуемого для прохождения зоны резонанса. Для повышения эффективности алгоритма управления достаточно изменять единственный настроечный параметр ![]() . Алгоритм обладает низкой чувствительностью к нарушению симметрии начальных условий.
. Алгоритм обладает низкой чувствительностью к нарушению симметрии начальных условий.
В главе 4 описана реализация алгоритма управления прохождением через зону резонанса в виртуальной лабораторной установке (см. http://www.ipme.ru/ipme/labs/ccs/virtlab/), разработанная в УНЦ «Проблемы механики, машиностроения и процессов управления» в 2000-2001 гг. и вошедшая в состав центра коллективного пользования «Мехатронные и мобильные комплексы».
На настоящий момент виртуальная лаборатория содержит две лабораторные работы: "Исследование динамики вибрационного стенда и эффекта Зоммерфельда" и "Исследование алгоритма прохождения через резонанс". Внешний вид виртуальной лабораторной установки для работы по исследованию алгоритма управления приведен на рис. 9. Установка позволяет выбирать алгоритм управления прохождением через зону резонанса вибрационного стенда, менять параметры алгоритма, следить за ходом вычислительного эксперимента и сравнивать результаты различных дистанционных экспериментов.
Программная часть виртуальной лаборатории включает в себя следующие компоненты:
- Модель системы, реализованная на языке JAVA.
- Подсистема выбора параметров модели (![]() ) и параметров алгоритма (управляющий момент
) и параметров алгоритма (управляющий момент ![]() , а также
, а также ![]() и
и ![]() для второй работы).
для второй работы).
- Подсистема визуализации движения виброустановки. Данная панель, в частности, позволяет проследить зависимость между колебаниями носителя и ротора.
- Осциллограф, позволяющий проследить зависимость между любыми двумя характеристиками состояния системы (время, угол поворота ротора, скорость ротора, отклонение носителя от положения равновесия, скорость отклонения носителя, полная энергия системы). Единовременно на экран выводится до 100 точек.
- Текстовое поле, в которое выводятся численные значения переменных системы.
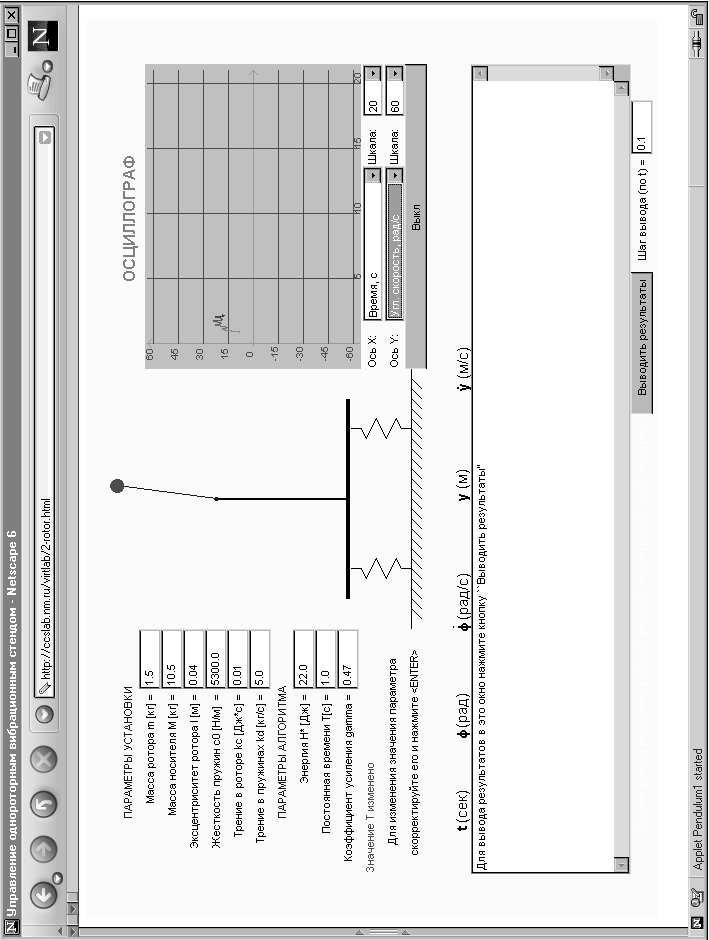
Рис. 9. Внешний вид виртуальной лабораторной установки
В главе 5 приводятся результаты разработки информационного Интернет-портала. Приводятся результаты разработки Интернет-портала РУСИКОН – Российский архив по системам и управлению (www.rusycon.ru), выполненного при участии диссертанта. На сайте представлены сведения о специалистах, коллективах, организациях, фондах, конференциях, книгах, журналах, издательствах, библиотеках и другие сведения, полезные для научных сотрудников, преподавателей и инженеров в области теории и систем управления и кибернетики, в том числе в области управления механическими системами и мехатроники. Содержится более 2000 ссылок на российские и зарубежные ресурсы, включая международные базы данных по системам и управлению, научно-информационные и образовательные сайты, виртуальные лаборатории и онлайн-эксперименты, сайты по нелинейной динамике и хаосу и т.д. Описана выбранная структура портала и приведены рекомендации по его использованию.
В Заключении сформулированы основные результаты работы:
1. Предложена общая постановка задачи управления прохождением через резонанс как задачи управления энергией вращающейся подсистемы механической системы при ограничении на величину энергии несущей подсистемы.
2. Предложены алгоритмы управления прохождением через зону резонанса для нескольких типовых задач: управление разгоном ротора с учетом упругости вала, управление однороторными и двухроторными вибрационными установками.
3. Исследована работоспособность разработанных алгоритмов, получены рекомендации по выбору настроечных параметров алгоритмов и даны качественные оценки робастности синтезированных систем.
4. Разработано программное обеспечение виртуальной лаборатории исследования прохождения через резонанс для однороторного вибрационного стенда.
5. Разработана информационная структура и программное обеспечение Интернет-портала РУСИКОН – Российского архива по системам и управлению.
Основное содержание диссертации отражено в следующих работах:
- Tomchin D, Fradkov A. Modeling and speed-gradient control of passage through resonance for the two-rotor vibration unit // Proc. 20th European Conference on Modeling and Simulation, Bonn, Germany, 2006, pp. 501-506.
- Томчин Д.А., Фрадков А.Л. Управление прохождением ротора через зону резонанса на основе метода скоростного градиента. Проблемы машиностроения и надежность машин, №5, 2005, с.66-71.
- Tomchina O.,Tomchin D. Fradkov A. Speed-gradient control of passing through resonance in one- and two-dimensional motion // Proc. 16th IFAC World Congress Autom.Control, Praha, July, 2005.
- Fradkov A.L., Tomchin D.A. Speed-gradient control for passage of unbalanced rotor through resonance in plane motion // Proc. 6th IFAC Sympos. Nonlinear Control Systems (NOLCOS 2004), Stuttgart, Germany. 2004, pp. 1367-1372.
- Tomchin D.A. Design of control algorithm for passage through resonance of flexural-and-torsional oscillations of a shaft with unbalanced rotor // Proc. 10th Intern. Student Olympiad on Automatic Control (BOAC'04), 2004. pp. 61-65.
- Томчин Д.А., Фрадков А.Л. Научно-информационный портал «РУСИКОН». Автоматика и телемеханика, №11, 2003, с. 195-201.
- Tomchin D.A. Controlling passage through resonance of plane motion of a rotor. // The 4th International Conference "Tools for Mathematical Modelling" (MATHMOD 2003). Abstracts. St.Petersburg, June 23-25, 2003, p. 139.
- Томчин Д.А., Фрадков А.Л. Информационный портал по системам и управлению. Журнал «Информационно-управляющие системы», 1, 2003, с. 47-51.
- Томчин Д.А. Виртуальная лаборатория для исследования и управления однороторным вибрационным стендом // В кн.: "Навигация и управление движением". Материалы 4-й конференции молодых ученых, Санкт-Петербург, 2002, с.246-252.
- Томчин Д.А., Фрадков А.Л. Создание проблемно-ориентированного научно-информационного сайта на примере сетевого архива по системам и управлению. В кн.: "Технологии информационного общества - Интернет и современное общество". Материалы Всероссийской объединенной конференции, Санкт-Петербург, 20-23 ноября 2001 г., с.66-68.
- Томчин Д.А. Разработка сетевых ресурсов для исследования однороторного вибрационного стенда // Сборник тезисов конференции "Новые информационные технологии и их применение“. Владикавказ, 2001.
- Томчин Д.А. Разработка экспериментальных версий сетевых ресурсов для исследования и проектирования систем управления // В кн.: "Навигация и управление движением". Материалы 3-й конференции молодых ученых, Санкт-Петербург, 2001, с.140-145.
