

Разработка аппаратурных методов учета влияния тропосферы при спутниковых измерениях в геодезии
На правах рукописи
Дымнов Даниил Геннадьевич
Разработка аппаратурных методов учета влияния тропосферы при спутниковых измерениях в геодезии
Специальность 25.00.32 – Геодезия
Автореферат диссертации на соискание ученой степени
кандидата технических наук
Москва 2009
Работа выполнена в Московском государственном университете геодезии и картографии (МИИГАиК) на кафедре высшей геодезии
| Научный руководитель: | доктор технических наук, профессор Голубев Анатолий Николаевич |
| Официальные оппоненты: | доктор технических наук, профессор Галкин Юрий Степанович кандидат технических наук Чеховский Александр Михайлович |
| Ведущая организация: | Государственный университет по землеустройству (ГУЗ) |
Защита диссертации состоится __ _________ 2009 г. в ___ часов на заседании диссертационного совета Д 212.143.03 в Московском государственном университете геодезии и картографии (МИИГАиК) по адресу: 105064, Москва, К-64, Гороховский пер., дом 4, зал заседаний ученого совета.
С диссертацией можно ознакомиться в библиотеке Московского государственного университета геодезии и картографии (МИИГАиК).
Автореферат разослан ___ _________ 2009 г.
Ученый секретарь диссертационного совета ___________Ю.М. Климков
Общая характеристика работы
Актуальность темы. Основными источниками ошибок при измерениях с использованием глобальных спутниковых навигационных систем (далее ГНСС) являются: атмосфера, расхождения в показаниях часов спутников и приёмников с системным временем, неточность эфемеридной информации. Из указанных источников ошибок атмосфера заслуживает отдельного рассмотрения. Ионосферный вклад в достаточной степени учитывается двухчастотным методом, основанным на дисперсии радиоволн в ионизированной среде. Тропосфера для радиоволн является недиспергирующей, и двухчастотный способ в ней не работает. Использование моделей позволяет снизить влияние тропосферы на точность определения координат, но, по разным источникам, моделирование имеет остаточную погрешность до 10 % от реальной задержки сигнала в тропосфере. Остаточное влияние тропосферы после применения моделей может доходить до трёх метров. В связи с этим актуальной является проблема отыскания иного подхода к учёту тропосферного влияния. В данной работе предложены методы определения зенитной тропосферной задержки без использования моделей.
Цель работы заключалась в изучении предложенного метода определения задержки спутникового сигнала в тропосфере, развитии его и практической реализации. Детальное изложение метода приведено далее.
На защиту выносятся:
- Сравнительный анализ существующих, наиболее распространённых тропосферных моделей;
- Результаты исследования влияния вертикального разнесения приёмников при относительном методе работы;
- Результаты исследования влияния суточного вращения Земли на определение координат;
- Вариант метода определения тропосферного влияния с использованием дифференциальной поправки;
- Вариант метода определения тропосферного влияния с использованием точных эфемерид.
Научная новизна. В данном исследовании разработан и экспериментально проверен метод аппаратурного определения учета влияния тропосферы при спутниковых измерениях в геодезии. Несмотря на кажущуюся громоздкость, метод даёт приемлемые результаты, что подтверждает верность выбранного направления. В работе представлен новый, научно и практически подтверждённый метод учёта влияния тропосферы на спутниковый сигнал. Рассмотренные в работе положения являются перспективными в плане дальнейшего развития, что даёт ещё одно направление научных изысканий для работ с использованием ГНСС.
Практическая значимость. В современных программах обработки результатов спутниковых наблюдений, особенно в научных, всегда имеется настройка, позволяющая пользователю прямо указать зенитную задержку в тропосфере. Это сделано не случайно. Именно зенитная задержка является результатом использования всевозможных моделей. Однако, модели не дают стопроцентной точности. Приходится прибегать к иным способам, например, к зондированию, которое, впрочем, не получило широкого распространения при работе с ГНСС. Возвращаясь к программам обработки, необходимо заметить, что для вычислений нужно значение задержки в зените. Предложенный способ как раз позволяет его вычислить. Указание достоверной зенитной задержки позволяет получить более качественные результаты обработки, что придает выполненной работе практическую значимость.
Апробация результатов и публикации. В процессе диссертационного исследования были проведены многочисленные экспериментальные исследования для подтверждения теоретических выкладок. Наиболее существенные результаты были изложены на научных конференциях и опубликованы в журналах.
- Голубев А. Н., Дымнов Д. Г. О возможности аппаратурного определения тропосферной поправки без привлечения моделей при спутниковых измерениях // "Известия вузов. Геодезия и аэрофотосъемка", № 1, 2008. с. 3 – 6.
- Дымнов Д. Г. О высотном разносе приемников при дифференциальном режиме работы глобальных спутниковых систем // "Известия вузов. Геодезия и аэрофотосъемка", № 3, 2008. с. 63 – 68.
- Дымнов Д. Г. Исследование зависимости длины трассы сигнала от угла возвышения спутника ГНСС // "Известия вузов. Геодезия и аэрофотосъемка", № 5, 2009. с. 66 – 68.
- Дымнов Д. Г. «О возможности аппаратурного определения тропосферной поправки без привлечения моделей». Доклад на ежегодной конференции молодых учёных. М., 2007 г.
- Дымнов Д. Г. «О синхронизации часов при спутниковых измерениях». Доклад на ежегодной конференции молодых учёных. М., 2009 г. 7 апреля 2009 г.
- Автор так же принимал участие в НИР «Анализ влияния ионосферы, тропосферы и приливов на GPS/ГЛОНАСС измерения» (шифр «Тропион»), М., 2005-2006 гг.
Структура и объём работы. Диссертация состоит из введения, трёх разделов, включающих 12 глав, заключения, списка литературы и приложения. Работа содержит 100 страниц основного текста, 25 рисунков и 12 таблиц. Список литературы содержит 54 наименований, в том числе 10 на иностранных языках.
Содержание работы
Введение. Сформулированы цель и задачи исследования. Обоснована идея перехода от модельного учёта к аппаратурному. Задачей исследования является анализ и реализация предложенного метода аппаратурного определения влияния тропосферы на спутниковый сигнал.
Теоретической основой для проведённого исследования явился метод, описанный в отчёте о НИР «Тропион» (МИИГАиК, 2006 г.) в разделе 3.2 «О возможности аппаратурного определения тропосферной поправки без привлечения моделей». При выполнении этой НИР был предложен метод, который позволил бы определять или исключать тропосферную поправку (задержку сигнала в тропосфере) без использования модельных представлений. Указано, что решение этой задачи может быть основано на использовании метода передачи дифференциальных поправок. Основная идея метода заключается в следующем.
Как известно, при дифференциальном методе на референцной станции, установленной в точке с известными координатами, вычисляются «эталонные» расстояния и сравниваются с измеренными, в результате чего получают дифференциальные поправки, передаваемые на роверный приемник. При наблюдении одного спутника эти поправки будут содержать задержку в тропосфере, задержку в ионосфере и ошибку часов (обусловленную несинхронностью хода часов спутника и приемника). Действительно, измеренная псевдодальность Р описывается выражением:
Р = + троп + ион + сtч, (1)
где - геометрическая дальность,
троп и ион - выраженные в линейной мере задержки в тропосфере и ионосфере соответственно,
tч - относительный уход часов,
с – скорость света в вакууме.
Вычисленная же по координатам спутника и референцного приемника дальность – это геометрическое расстояние, и разность вычисленной и измеренной дальностей будет
= троп + ион + сtч. (2)
Существенным обстоятельством является то, что ошибки эфемерид спутника войдут как в вычисленное расстояние, так и в измеренное, и в разности (2) исключатся.
Если же на референцной станции, как это обычно и бывает, наблюдаются четыре и более спутников, то наряду с тремя координатами станции определяется и поправка часов tч, что позволяет исключить из разности (2) член (сtч ), и эта разность будет содержать только задержки в тропосфере и ионосфере.
Используя двухчастотный приёмник, можно исключить ионосферный член ион из разности (2). Следовательно, предусмотрев соответствующие алгоритмы обработки в программном обеспечении, можно реализовать случай, когда дифференциальная поправка, передаваемая на роверный приемник, например, в формате RTСM-104, будет содержать в себе только тропосферную задержку троп.
Таким образом, мы получаем метод аппаратурного определения задержки сигнала в тропосфере, или, другими словами, аппаратурный метод учета влияния тропосферы без привлечения каких бы то ни было моделей (при условии, что приемники разнесены на не слишком большое расстояние).
Точность этого метода требует дополнительных исследований, однако ожидается, что она будет выше, чем при использовании моделей – хотя бы за счет того, что предлагаемый метод позволяет работать в реальном времени.
В диссертационной работе предполагалось выполнить теоретические и экспериментальные исследования приведённого выше метода. Изучение данного вопроса проходило параллельно с практической реализацией и проверкой теоретических выкладок. Было проведено большое количество экспериментов, что позволило доработать начальную теорию, внести необходимые корректировки и дополнения. В итоге, после внесения ряда правок, теоретическое обоснование предложенного метода подтверждено практической реализацией.
Первый раздел.
Содержимое данного раздела посвящено атмосфере и современным методам учёта влияния тропосферы на спутниковый сигнал. Раздел состоит из трёх глав. В первой главе рассматривается атмосфера и её влияние на спутниковый сигнал. Приводится состав атмосферы, несколько моделей вертикальной структуры атмосферы. Рассмотрены слои атмосферы, принятые в радиометеорологии – тропосфера, стратосфера и ионосфера. Указаны их физические и электромагнитные свойства, а также влияние на радиосигналы. Приводится информация о задержке сигнала в атмосфере и рассматривается вопрос о рефракции радиоволн. Во второй главе описаны модели тропосферы, используемые при спутниковых измерениях. Приводится информация о трёх распространённых моделях для расчёта зенитной задержки – биквадратная модель Хопфилд, модифицированная модель Хопфилд, модель Саастамойнена, а так же упрощённая модель, описываемая выражением:
| (1) |
где Z – зенитное расстояние.
Указаны существующие недостатки этих моделей и сложности в ряде способов их использования. В третьей главе представлен сравнительный анализ точности тропосферных моделей. Рассчитаны величины тропосферных задержек в метрах для различных зенитных расстояний (с шагом 1 градус) при использовании разных моделей (рис.1 и рис.2). По полученным данным построены таблица и графики, наглядно отображающие поведение искомой величины для разных моделей и разных зенитных расстояний.
Сделан вывод о том, что рассмотренные модели обеспечивают примерно одинаковый уровень точности.
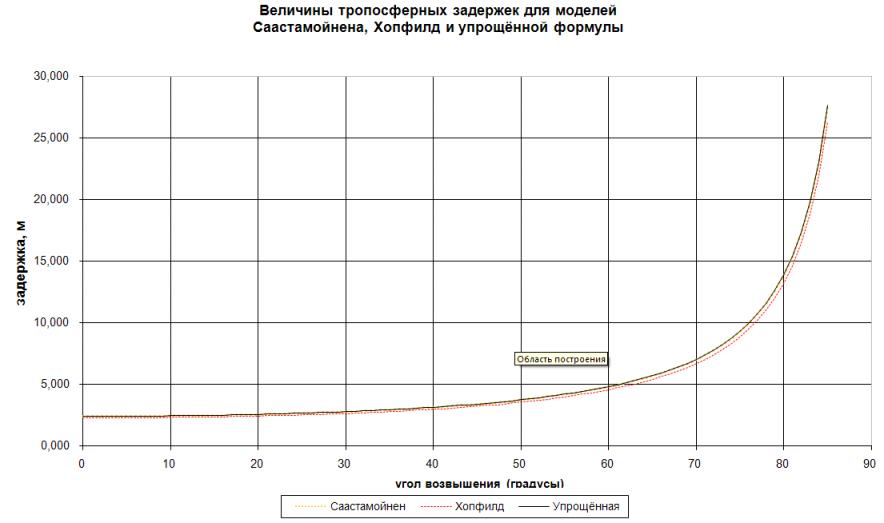
Рис. 1. Величины тропосферных задержек

Рис. 2. Увеличенный фрагмент
Второй раздел.
В данном разделе рассматривается дифференциальный режим работы ГНСС, принципы которого заложены в основу исследуемого метода аппаратурного определения задержки в тропосфере. Описана необходимость в дифференциальном методе в современных геодезических работах с использованием ГНСС, раскрыта суть дифференциального метода работы. Приводятся сведения о режиме, получившем название «кинематика в реальном времени – RTK», как наиболее точном из дифференциальных методов, применяемых в настоящее время. В части, посвящённой методам передачи дифференциальной поправки, даются сведения о двух применяемых стандартах – RTCM и Ntrip (протокол передачи дифференциальных поправок через Интернет). При классификации современных дифференциальных систем спутниковой навигации приведена информация о локальных дифференциальных системах, широкозонных дифференциальных системах и глобальных дифференциальных системах. В заключительной главе второго раздела – «О высотном разносе приёмников при дифференциальном режиме работы глобальных спутниковых систем» - анализируется проблема вертикального разнесения приёмников.
При описании дифференциального режима работы ГНСС часто указывают на допустимое расстояние между базовым приёмником и мобильным, имея в виду разнесение приёмников в плане. Считается, что при расстоянии не более 20 км спутниковые сигналы, принимаемые обоими приёмниками, проходят в одинаковых атмосферных условиях, и влияние атмосферы на них одинаково. Однако если приёмники находятся на разных высотах, то это приводит к тому, что сигналы в любом случае будут проходить в разных атмосферных условиях.
В заключительной главе второго раздела представлены результаты расчёта разности атмосферного влияния для двух приёмников с перепадом высот в 2 км. Расчёты приведены для углов возвышения спутников от 10 до 90 градусов с шагом в 1 градус. В данном исследовании для первого приёмника использовались параметры стандартной атмосферы Rizos. Расчет зенитной тропосферной задержки в линейной мере для 1-го приёмника осуществлялся по формуле, полученной с помощью модели Хопфилд.
Для расчёта индекса преломления в точке стояния второго приёмника использовались эмпирические зависимости, обоснованные в модели Хопфилд.
Переход от зенита к наклонным трассам осуществляется по следующей формуле:
 , , | (2) |
где E – угол возвышения спутника над горизонтом.
Полученный график зависимости тропосферных задержек (для обоих приёмников) от угла возвышения спутника над горизонтом приведён ниже (рис. 3).
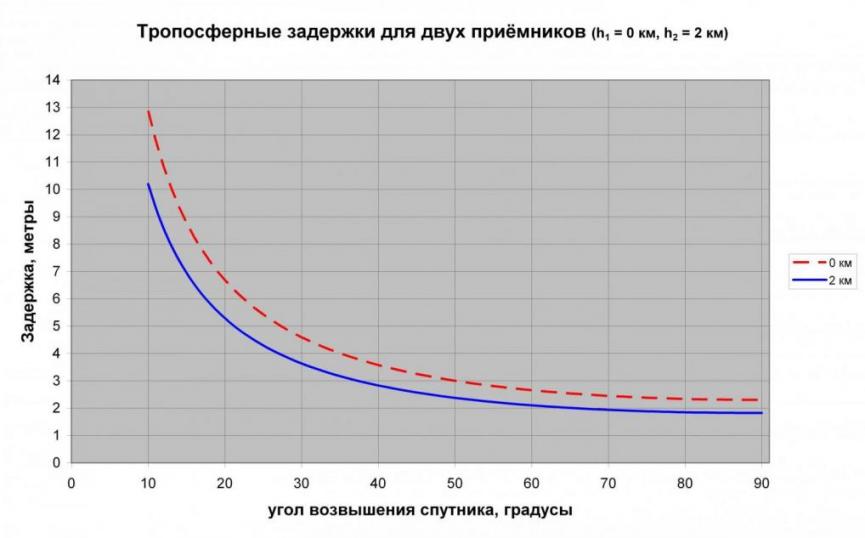
Рис. 3 График зависимости тропосферной задержки от угла возвышения спутника над горизонтом.
Проведённый анализ показал, что разница в высотах приёмников в 2 км приводит к разности тропосферных задержек до трёх метров. Данные результаты означают, что при дифференциальном режиме работы, помимо планового разноса приёмников, необходимо обращать внимание и на разность высот приёмников.
Третий раздел.
Последний раздел диссертационной работы посвящён аппаратурным методам определения задержки в тропосфере. Описаны три независимых метода и проведённые с их использованием эксперименты. В первой главе третьего раздела даётся общее теоретическое обоснование, которое справедливо для всех предложенных методов. Всего было предложено и исследовано три метода:
- с использованием дифференциальной поправки;
- с использованием бортовых эфемерид;
- с использование точных эфемерид.
Вторая глава описывает метод определения задержки в тропосфере с использованием дифференциальной поправки.
Общая идея метода состоит в "вычленении" из дифференциальной поправки ионосферного компонента, используя двухчастотный метод. Для осуществления этой операции спутниковый приёмник работает одновременно в двух режимах:
- на выдачу дифференциальной поправки через заданный порт;
- на запись сырых данных во внутреннюю память приёмника или на внешний носитель данных (ПК).
Дифференциальные данные (тип RTCM сообщения 1) представляют собой разность между вычисленной и измеренной дальностями "спутник-приёмник", при этом необходимым условием является синхронизация часов приёмника с системным временем. Поправки передаются в бинарном (двоичном) формате, что уменьшает их размер, по сравнению с символьным форматом, практически на порядок. Однако, для обработки бинарные данные неудобны, и в диссертационном исследовании они переводились в удобный для восприятия буквенно-цифровой формат. Приём данных с COM-порта приёмника осуществлялся с помощью программного обеспечении (далее ПО) Microsoft ® Hyper Terminal версии 5.1. Принимаемый поток данных записывался в виде двоичных файлов. Далее файлы обрабатывались ("считывались") в ПО RTCM-WIN, которое представляло данные в виде графиков и таблиц.
Сырые данные, которые, как и дифференциальные поправки, имеют бинарный формат, списывались с приёмника в персональный компьютер (далее ПК) и впоследствии, с использованием ПО tps2rin, преобразовывались в формат RINEX. Из файлов RINEX извлекались данные фазовых и кодовых псевдодальностей на обеих несущих, что позволяло применить двухчастотный метод для получения ионосферно-свободных псевдодальностей. Последние сравнивались с дифференциальными поправками, генерируемыми приёмником. Основные вычисления проводились в ПО Microsoft ® Excel 2007 (Excel 2003), часть из которых автоматизировалась при помощи макросов.
Общая схема установки приведена ниже на рис. 4.
При сравнении модельных и аппаратурных значений задержек наблюдалось различие от 40 см до трёх метров (табл. 1). Данный разброс объясняется неточностью бортовых эфемерид, а также неполной синхронизацией часов приёмника с системным временем.
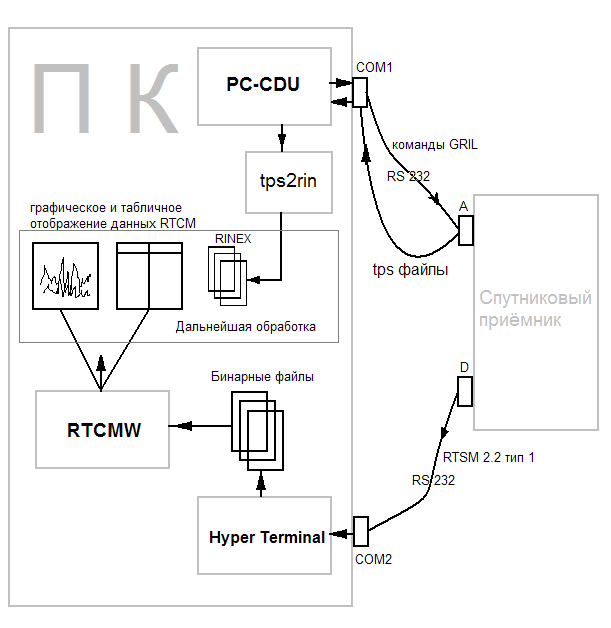
Рис. 4. Расчет задержки в тропосфере по дифференциальной поправке
Данные на 08.11.07 13:54:10
Табл. 1
| C/A (м) | P2 (м) | ион (м) | ДП | ТП | |
| G 3 | 23 439 984,456 | 23 439 986,361 | 2,945229713 | -11,46 | -8,51477 |
| G 6 | 22 754 439,408 | 22 754 442,657 | 5,02268785 | -7,44 | -2,41731 |
| G16 | 21 462 278,531 | 21 462 280,280 | 2,70409618 | -5,52 | -2,8159 |
| G18 | 22 599 456,024 | 22 599 457,992 | 3,042610565 | -8,18 | -5,13739 |
| G21 | 20 523 420,592 | 20 523 421,469 | 1,356221554 | -3,42 | -2,06378 |
| G24 | 21 848 830,024 | 21 848 832,952 | 4,526509229 | -5,72 | -1,19349 |
| G26 | 23 472 262,758 | 23 472 266,524 | 5,821829108 | -11,34 | -5,51817 |
| G29 | 22 786 139,995 | 22 786 142,361 | 3,657810219 | -7,72 | -4,06219 |
Табл. 1 (продолжение)
| ион (м) | ДП | ТП | E | Z | мод ТП | Разность | |
| G 3 | 2,945229713 | -11,46 | -8,51477 | 19 | 71 | 7,402444 | -1,11233 |
| G 6 | 5,02268785 | -7,44 | -2,41731 | 32 | 58 | 4,547863 | 2,13055 |
| G16 | 2,70409618 | -5,52 | -2,8159 | 50 | 40 | 3,146032 | 0,330128 |
| G18 | 3,042610565 | -8,18 | -5,13739 | 36 | 54 | 4,100137 | -1,03725 |
| G21 | 1,356221554 | -3,42 | -2,06378 | 82 | 8 | 2,433684 | 0,369906 |
| G24 | 4,526509229 | -5,72 | -1,19349 | 45 | 45 | 3,408255 | 2,214764 |
| G26 | 5,821829108 | -11,34 | -5,51817 | 17 | 73 | 8,242932 | 2,724761 |
| G29 | 3,657810219 | -7,72 | -4,06219 | 31 | 59 | 4,679266 | 0,617076 |
В таблице используются следующие обозначения:
"C/A (м)"– псевдодальность, измеренная по C/A коду на несущей L1;
"P2 (м)" – псевдодальность, измеренная на несущей L2;
"ион (м)" – величина ионосферного вклада в метрах в измеренную псевдодальность, рассчитанная двухчастотным методом;
"ДП" – величина дифференциальной поправки в метрах;
"ТП" – величина тропосферной поправки в метрах;
"E" – угол возвышения спутника (зенит соответствует 90 градусам);
"Z" – зенитное расстояние до спутника (Z = 90 – E);
"мод ТП" – величина тропосферной задержки, вычисленная по упрощённой модели;
"Разность" – разность между "ТП" и "мод ТП".
Метод определения задержки в тропосфере с использованием дифференциальной поправки - наиболее приближённый к исследуемой теории, однако, практическая его реализация выявила ряд недостатков, из которых можно выделить три основных.
Первый из них состоит в том, что определяемая величина задержки сигнала в тропосфере будет содержать в себе ошибки эфемерид. Ошибки, вносимые неточным прогнозированием положения спутника на определённый момент времени, могут достигать 3 метров. Задержки в тропосфере, как было выяснено в первом разделе диссертационной работы, могут доходить до 30 метров. Таким образом, итоговая точность определения снижается более чем на 10%.
Вторым недостатком метода является необходимость в соответствующем приёмнике, генерирующем дифференциальную поправку. Как правило, для статики – основного вида геодезических работ – подобные приёмники редко используют, ввиду дополнительной стоимости программных и аппаратных опций. Кроме этого, нет контроля над вычислениями и передачей самой дифференциальной поправки, так как неизвестен алгоритм расчёта, который был заложен производителем приёмника, а во время передачи данных могут возникнуть непредсказуемые ошибки.
И, наконец, третьим недостатком является необходимость дальнейшей обработки полученной дифференциальной поправки, для извлечения из неё задержек сигнала в ионосфере.
Преимуществом метода можно назвать законченный и стандартизированный способ передачи данных с базового приёмника на мобильный и некоторое упрощение процесса вычисления, так как работа частично "проделана" уже в базовом приёмнике.
Данный метод рассмотрен здесь лишь как возможный метод определения задержки в тропосфере. Реализация его весьма трудоёмка, в силу чего в настоящее время его практическое внедрение маловероятно.
Третья глава посвящена методу определения задержки в тропосфере с использованием бортовых эфемерид. Данный метод аналогичен следующему. Разница лишь в используемых эфемеридах и, соответственно, обработке. По этой причине, по данному методу приводится лишь схема (рис. 5) и выводы. Основное же описание дано в следующей главе – «метод определения задержки в тропосфере с использованием точных эфемерид».
Определяемая данным методом тропосферная поправка будет содержать в себе ошибки эфемерид, что может ухудшить результат до трёх метров.
Преимущество данного метода по сравнению с предыдущим заключается в том, что нет необходимости в дополнительной функции приёмника, реализующей генерацию дифференциальной поправки. Дело в том, что не все приёмники могут генерировать дифференциальную поправку, и описанный здесь алгоритм расчётов не требует этого от приёмника.
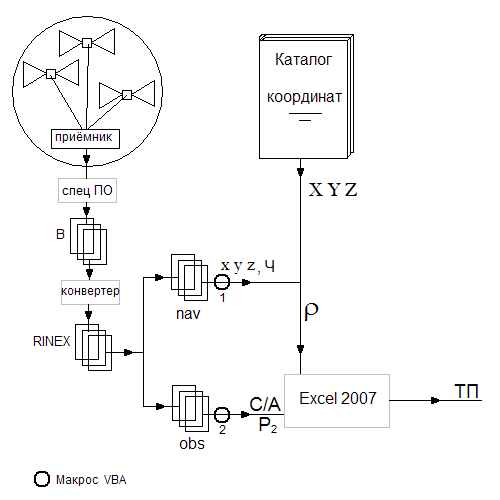
Рис. 5. Расчет задержки в тропосфере по бортовым эфемеридам
Для работы может использоваться любой двухчастотный приёмник. Использование одночастотного приёмника также допустимо, в случае, если в группе с ним, на удалении не более 10-20 км, работает двухчастотный приёмник, например, на базовой станции. Более того, приёмник может быть односистемным, а данные о влиянии тропосферы, полученные с его помощью, могут применяться для измерений, проведённых по другой спутниковой системе.
Глава 4 последнего раздела содержит описание метода определения задержки спутникового сигнала в тропосфере с использованием точных эфемерид. Общая схема реализации описываемого метода приведена ниже (рис. 6).
По рассматриваемому методу был проведен ряд экспериментов, которые можно разделить по способу получения данных для обработки на два вида:
- Данные непосредственно собирались спутниковыми приёмниками;
- Скачивались готовые данные наблюдений с постоянно действующих базовых станций (далее ПДБС), выложенные в Интернете, в частности данные с ПДБС компании НАВГЕОКОМ и ПДБС сети IGS (http://www.navgeocom.ru/stn/index.htm и http://sopac.ucsd.edu/dataArchive/ соответственно);
В экспериментах первого типа использовались двухчастотные спутниковые приёмники для сбора сырых данных в режиме статики. Собранные данные через соответствующие конвертеры (программы-преобразователи форматов данных) переводились в формат RINEX. Дальнейшая работа совпадала для двух видов экспериментов.
Файлы RINEX обрабатывались в ПО BERNES в подпрограмме CCRINEXO.
Целью обработки файлов RINEX в ПО CCRINEXO было:
- упорядочивание собранных данных в порядке возрастания номеров спутников в рамках одной эпохи измерений, что упрощало дальнейшую обработку, так как данные в файлах точных эфемерид (*.sp3 и/или *.PRE) отсортированы подобным образом;
- смена дискретизации частоты данных на 15 минут, что позволяло использовать точные эфемериды без интерполяции;
- удаление данных системы ГЛОНАСС. В обработке подобные измерения не участвовали, так как на момент проведения экспериментов проблема с точными эфемеридами для спутников ГЛОНАСС ещё только решалась.
Полученные таким образом файлы измерений обрабатывались в ПО Microsoft ® Word 2007 (Word 2003) с использованием специально написанного макроса. Цель использования макроса состояла в преобразовании данных в табличную форму, удобную для фильтрации и дальнейших вычислений.
Файлы точных эфемерид закачивались с FTP-сайта ftp://igscb.jpl.nasa.gov/igscb/product/;
Дальнейшая работа с файлами происходила в ПО Microsoft ® Excel 2007, где с использованием функции расширенного фильтра производилась выборка эфемерид на заданный спутник и формирование результата в виде таблицы.
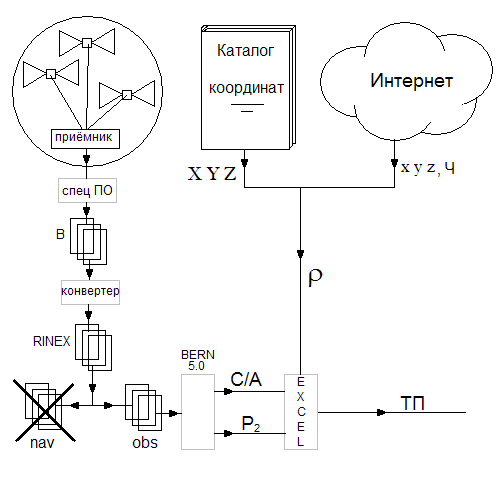
Рис. 6. Расчет задержки в тропосфере по точным эфемеридам
Следующим шагом обработки был учёт вращения Земли за время распространения спутникового сигнала.
В измеренные псевдодальности вводились поправки за переход от шкал спутниковых часов и шкалы приёмника к системному времени. Из исправленных псевдодальностей создавались ионосферно-свободные комбинации. Далее рассчитывались расстояния «спутник-приёмник» по координатам станции и точным координатам спутников. На завершающем шаге рассчитывалась тропосферная задержка по формуле:
| Т = Р3 - , | (3) |
где Р3 – псевдодальность, свободная от ионосферного влияния и рассинхронизации часов приёмника и спутника;
- геометрическая дальность, рассчитанная по координатам спутника и приёмника, с учётом вращения Земли.
Параллельно с данными вычислениями проводился расчёт влияния тропосфере по упрощённой модели (1). Несмотря на крайнюю простоту, качество этой формулы подтвердилось при сравнительном анализе её с прочими моделями, что указано ранее.
Величина расхождений между модельными данными, рассчитанными по формуле (1) и данными, полученными по формуле (3), колебалась в пределах от одного до нескольких метров. Этот факт даёт основание сделать вывод, что предложенный метод позволяет определять влияние тропосферы на спутниковый сигнал и нуждается в дальнейшем развитии и доработке.
Разброс результатов с модельными данными носит случайный характер и, как сказано выше, не превышает нескольких метров. Полученные результаты указывают на необходимость дальнейшей проработки метода. Так, например, в проведённом исследовании не учитывалась задержка в цепях приёмника и влияние переотражённых сигналов на результат измерений. При дальнейшем учёте этих и ряда других факторов можно будет ставить вопрос о сравнительном анализе точности модельных и аппаратурных результатов. Пока можно с уверенностью сказать, что аппаратурный учёт влияния тропосферы на спутниковый сигнал возможен.
Недостатки данного метода следующие.
Величина задержки сигнала в тропосфере при определении по данному методу может быть рассчитана лишь после получения точных эфемерид спустя две недели после проведения измерений. Вообще, продолжительность определяется скоростью опубликования точных эфемерид. Если финальные эфемериды будут публиковаться быстрее, то и вычислить задержку можно будет раньше. Однако данный недостаток не так существенен, потому что при спутниковых геодезических измерениях, как правило, используется постобработка. После проведения полевого сезона выполняется окончательная обработка полученных результатов. Следовательно, нет явной необходимости получать тропосферные задержки в реальном времени.
Преимущества данного метода очевидны. Весь алгоритм вычисления у пользователя имеется в явной форме. Использование точных эфемерид позволяет снизить влияние ошибок прогнозирования до 5 см [http://igscb.jpl.nasa.gov/components/prods.html]. Наконец, это аппаратурный метод, для которого не свойственно приближение и моделирование, он даёт реальные величины для конкретных условий прохождения сигнала.
Заключение
Основные результаты работы, выводы и предложения:
- Проведён анализ существующих наиболее распространённых моделей. Доказана их примерная «равноточность». Выявлены и проанализированы недостатки модельного учёта тропосферного влияния.
- Изучена идея метода, описанного в отчёте о НИР «Тропион» (МИИГАиК, 2006 г.) в разделе 3.2 «О возможности аппаратурного определения тропосферной поправки без привлечения моделей». На основе указанного метода спроектированы и проведены эксперименты.
- Доработан метод, указанный в пункте 2. В частности, доказано влияние эфемеридных данных на получаемые результаты и обоснована необходимость использования точных эфемерид, добавлен учёт вращения Земли.
- Проведены исследования влияния вертикального разнесения приёмников при относительном методе работы. Экспериментально и теоретически доказана необходимость данного учёта. Результаты исследований представлены в табличной и графической форме.
- Разработан метод определения задержки в тропосфере с использованием дифференциальной поправки. Предложена схема установки, даны указания по проведению вычислений с использованием данного метода. Сделаны выводы, оценены достоинства и недостатки.
- Разработан метод определения задержки в тропосфере с использованием бортовых эфемерид. Предложена схема установки, даны указания по проведению вычислений с использованием данного метода. Сделаны выводы, оценены достоинства и недостатки.
- Разработан метод определения задержки в тропосфере с использованием точных эфемерид. Предложена схема установки, даны указания по проведению вычислений с использованием данного метода. Сделаны выводы, оценены достоинства и недостатки. Доказана возможность использования метода для определения тропосферного воздействия на спутниковый сигнал.
Рассмотренный в данной работе способ учёта тропосферы с точными эфемеридами может с успехом применяться во многих геодезических работах, где наблюдения делятся на два этапа – определение базовых точек и от них определение всех остальных.
Метод может быть распространен и на фазовые дальности. Ожидается, что при этом точность учёта тропосферного влияния будет ещё выше.
Современные ГНСС постоянно развиваются, и модельный учёт тропосферы неизбежно станет сдерживающим фактором для дальнейшего развития системы. Проделанная работа представляет иной подход и открывает дополнительные направления для исследований.
Список научных работ автора по теме диссертации
- Голубев А. Н., Дымнов Д. Г. О возможности аппаратурного определения тропосферной поправки без привлечения моделей при спутниковых измерениях // "Известия вузов. Геодезия и аэрофотосъемка", № 1, 2008. с. 3 – 6.
- Дымнов Д. Г. О высотном разносе приемников при дифференциальном режиме работы глобальных спутниковых систем // "Известия вузов. Геодезия и аэрофотосъемка", № 3, 2008. с. 63 – 68.
- Дымнов Д. Г. Исследование зависимости длины трассы сигнала от угла возвышения спутника ГНСС // "Известия вузов. Геодезия и аэрофотосъемка", № 5, 2009. с. 66 – 68.
- Дымнов Д. Г. «О возможности аппаратурного определения тропосферной поправки без привлечения моделей». Доклад на ежегодной конференции молодых учёных. М., 2007 г.
- Дымнов Д. Г. «О синхронизации часов при спутниковых измерениях». Доклад на ежегодной конференции молодых учёных. М., 2009 г. 7 апреля 2009 г.