

Система позиционно-силового управления роботом для механотерапии
На правах рукописи
Журавлев Виталий Валерьевич
Система позиционно-силового управления роботом для механотерапии
| Специальности: 05.02.05 - | Роботы, мехатроника и робототехнические системы | |
| 05.11.17 - | Приборы, системы и изделия медицинского назначения |
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
кандидата технических наук
Москва – 2011
Работа выполнена в Московском государственном индустриальном университете
| Научный руководитель Научный консультант Официальные оппоненты: Ведущая организация | Кандидат технических наук доцент Головин Вадим Федорович Доктор медицинских наук академик РАМН РФ Разумов Александр Николаевич Доктор физико-математических наук профессор Павловский Владимир Евгеньевич Доктор технических наук профессор Афонин Вячеслав Леонидович ОАО «Научно-производственное объединение «Экран» |
Защита состоится «20» сентября 2011 года в 16:30 на заседании диссертационного совета Д 212.141.02 при Московском государственном техническом университете им. Н.Э. Баумана по адресу:
105005, г. Москва, 2-я Бауманская ул., д. 5.
Ваш отзыв на реферат в одном экземпляре, заверенный гербовой печатью организации, просим выслать по адресу:
105005, г. Москва, 2-я Бауманская ул., д. 5, ученому секретарю совета
Д 212.141.02, ауд. 613М.
С диссертацией можно ознакомиться в библиотеке МГТУ им.
Н.Э. Баумана.
Автореферат разослан «___» ________ 2011 года.
Ученый секретарь диссертационного совета
кандидат технических наук, доцент _________Муратов И.В.
Актуальность работы
Данная работа посвящена разработке робототехнических систем для механотерапии в восстановительной медицине.
Восстановительная медицина, к которой относится механотерапия, по словам академика И.П. Павлова, достигает своей цели только в случае перехода от медицины патологии к медицине здоровья здоровых. Эта мысль актуальна и сегодня. В Российском научном центре восстановительной медицины и курортологии под руководством академика РАМН А.Н. Разумова разработана здоровьецентрическая модель системы здравоохранения, суть которой заключается в сохранении здоровья здорового человека. Среди множества немедикаментозных воздействий естественным является механическое воздействие, включающее процедуры движения конечностей в суставах и массаж. Эти процедуры известны издавна, эффективность их бесспорна, но доступность ограничена по причине больших энергозатрат массажистов и, следовательно, их высокой стоимости. Повысить массовость и эффективность этих оздоровительных процедур можно путем использования аппаратных средств, о чем писал Н.В. Заблудовский еще в 19 веке. В настоящее время эту идею можно реализовать с помощью робототехники. Выигрыш робота в проведении процедур достигается за счет более точных, надежных действий, независимых от нервного напряжения врача, его субъективных оценок, а также за счет возможности многократного повторения определенных процедур. Также использование роботов для восстановительной медицины будет экономически оправдано в случае массового применения их в повседневной жизни в оздоровительных центрах, в том числе и университетских для повышения работоспособности преподавателей и студентов, тренажерных залах и в качестве домашнего массажиста.
Идея использования роботов для массажа не является новой. Активно внедряются в быт различные роботы для массажа груди, лица, головы и других частей тела. Однако в таких роботах никак не оценивается эффект от выполнения массажных процедур.
Эффективность выполнения массажа должна контролироваться путем измерения и оценки текущего состояния пациента. Это достигается управлением роботом как биотехнической системой. Поскольку массажное воздействие является механическим, то необходимым условием для реализации биотехнического управления является управление положением и усилием, то есть, позиционно-силовое управление (ПСУ).
При работе с пациентом особое внимание уделяется безопасности выполнения процедур, что обеспечивается, в том числе, за счет использования предлагаемых методов ПСУ.
Цель работы – повышение эффективности реабилитации пациентов за счет реализации метода позиционно-силового управления робототехнической системой c силовым обучением для механотерапии.
Задачи
- Разработать модели контактного взаимодействия инструмента робота и мягких тканей пациента;
- Разработать метод и алгоритмы позиционно-силового управления для задач восстановительной медицины;
- Разработать программные и аппаратные средства для медицинского робота;
- Провести испытания на моделях, макетах и в медицинских учреждениях, оценить эффективность разработанных алгоритмов;
- Определить требования, предъявляемые к робототехнической системе, выполняющей приемы механотерапии.
Научная новизна
В процессе проведения теоретических и экспериментальных исследований в работе получены следующие новые научные результаты:
- Разработан метод позиционно-силового управления (ПСУ) с силовым обучением робототехнической системой для механотерапии, повышающий ее эффективность и безопасность.
- Разработаны модели взаимодействия мягких тканей человека и инструмента робота, необходимые для реализации алгоритмов ПСУ.
- Разработаны алгоритмы позиционно-силового управления робототехнической системой на основе предложенного метода силового обучения, необходимые для механотерапии.
- Реализованы алгоритмы позиционно-силового управления с использованием метода силового обучения на модернизированном роботе РМ-01.
Практическая ценность
- Предлагаемый метод позиционно-силового управления роботом адаптирует существующую робототехнику для решения задач восстановительной медицины;
- На основе разработанных методов управления предлагается разработка новых специализированных роботов для механотерапии
- Силовая обратная связь повышает эффективность и безопасность применения робототехнических средств для механотерапии.
- Проведенные эксперименты и исследования на реальном оборудовании в РНЦ ВМиК подтверждают работоспособность разработанных алгоритмов;
- Разработаны датчики усилия медицинского робота для обеспечения силовой обратной связи.
Методы исследования
При разработке основных положений работы использованы методы теории автоматического регулирования, теории стационарных случайных процессов, теории нечетких вычислений. Исследование работоспособности разрабатываемых алгоритмов проводится путем моделирования с использованием математических пакетов МВТУ 3.7, Matlab Simulink, Simulink Response Optimization, а также на модернизированном роботе на базе РМ-01 в клинической практике.
Достоверность научных положений, сформулированных в работе, подтверждена корректным использованием математического аппарата, результатами моделирования применения разработанного метода на практике при решении задачи позиционно-силового управления роботом для механотерапии.
Апробация работы
Основные положения работы докладывались на:
- 18-й научно-технической конференции «Экстремальная робототехника» (Санкт-Петербург, 2007 г.);
- международной выставке «Робототехника» 2007 г.
- VII, VIII Международной научно-практической конференции «Молодые ученые – промышленности, науке и профессиональному образованию: проблемы и новые решения» (Москва, 2008-2009 гг.);
- Международной научно-технической мультиконференции "Мехатроника, автоматизация, управление" (МАУ-2009) С. Дивноморское, 2009 г.;
- VII, VIII, IX Всероссийской выставке научно-технического творчества молодёжи (НТТМ-2007, НТТМ-2008, НТТМ-2009). Всероссийский выставочный центр (Москва, ВВЦ, 2007-2009гг.);
Работа написана при поддержке гранта РФФИ № 09-08-00261-a.
Получен патент на полезную модель «Биоуправляемый массажный робот» № 2011100884 от 16.03.2011.
Положения, выносимые на защиту:
- Концепция применения робототехники с позиционно-силовым управлением в задачах восстановительной медицины;
- Модели контактного взаимодействия инструмента робота и мягкой ткани пациента;
- Метод и алгоритмы позиционно-силового управления роботом для восстановительной медицины;
- Требования к робототехнической системе для механотерапии;
Структура диссертации и содержание работы
Во введении обоснована актуальность темы и сформулированы цели и задачи диссертации.
В первой главе приведен обзор применения робототехнических средств в медицине. Общая классификация аппаратных средств медицинского назначения, в которой определено место данной разработки, приведена на рис. 1.
Среди средств для механотерапии, выполняющих приемы разнообразного массажа, рассмотрены существующие аппаратные комплексы – роботы для шлейф-массажа, массажа лица и спины.

Рис. 1. Классификация робототехнических средств для медицины
Эффективность выполнения массажа должна контролироваться путем измерения и оценки параметров состояния пациента. Такая система является биотехнической. Поскольку массажное воздействие является механическим, то необходимым условием для реализации биотехнического управления является управление положением и усилием, то есть, позиционно-силовое управление (ПСУ). Поэтому общая структура такой системы может быть представлена в виде схемы, как на рис. 2. Система включает в себя два замкнутых контура управления – биотехнический и силовой. Биотехническая обратная связь обеспечивает управление по параметрам психофизиологического состояния пациента ![]() . В данной работе рассматривается силовая обратная связь (выделена на рис. 2). Основными переменными данного контура являются траектория X и усилие взаимодействия F.
. В данной работе рассматривается силовая обратная связь (выделена на рис. 2). Основными переменными данного контура являются траектория X и усилие взаимодействия F.

Рис. 2. Структурная схема системы
Системы ПСУ известны в машиностроении. Теоретические основы методов позиционно-силового управления рассмотрены в работах M. Вукобратовича, Д.Е. Охоцимского, Е.И. Юревича, В.С. Гурфинкеля, В.Л. Афонина, И.Н. Егорова, Ю.В. Подураева. В главе приведен обзор данных работ, однако применение таких позиционно-силовых систем связано с работой с твердыми материалами – шлифовка, сборка, обдирка, и т.д. Для работы на мягких тканях предлагается разработанный в диссертации метод ПСУ с использованием силового обучения.
Одним из решений робототехнической системы с использованием ПСУ для механотерапии является комплекс, представленный на рис. 3. Робот оснащен датчиками усилий. С помощью силовых датчиков робот способен обеспечивать необходимое постоянное усилие взаимодействия инструмента робота с мягкой тканью. Одна из разработок на базе отечественного робота РМ-01 была запатентована, на ней проведены исследования совместно с Российским научным центром восстановительной медицины и курортологии.

Рис. 3. Модернизированный робот для механотерапии
Дальнейшее совершенствование системы рассматривается с применением в качестве основы промышленных манипуляционных роботов с современной системой управления, позволяющей реализовывать сложные алгоритмы ПСУ. Также предполагается разработка специализированных медицинских роботов с упрощенной кинематикой.
Критериями эффективности выполнения процедур считаются показатели точности отслеживания задаваемого усилия. Эти показатели могут рассматриваться в числе требований, предъявляемых к проектированию робота. Для массажиста требование поддерживать заданное усилие является трудновыполнимой задачей, и от процедуры к процедуре отклонения усилия увеличивается. Преимуществом робота является независимость поддержания точности усилия от количества повторов процедур.
В главе рассматривается необходимость выработки специфических требований, предъявляемые к роботу, включающие рабочую зону, кинематику, требования точности по положению и усилию, требования к эргономике и безопасности.
Вторая глава посвящена исследованию взаимодействий инструмента робота с мягкими тканями, которые отличаются от взаимодействий с твердыми телами, рассмотренных в первой главе. Под мягкими тканями (МТ) понимаются мышцы, фасции, кожа, жировая прослойка, связки, хрящи, сухожилия. Для задач массажа считаем, что МТ пассивна. Существенными особенностями мягких тканей являются их нелинейные характеристики и большие деформации при механотерапии.
В главе приведены основные виды воздействий на МТ в характерных приемах массажа. Рассматривая контактное взаимодействие, следует отметить распределённый характер нагружения МТ при массаже, но в дальнейшем будет использоваться эквивалентная сосредоточенная сила сопротивления среды Fe, уравновешиваемая усилием привода Fd.
![]() ,
,
где M – матрица приведенных масс инструмента робота и мягкой ткани, x – вектор перемещений инструмента, Fe – вектор силы сопротивления МТ, Fs – вектор силы упругости МТ, Ff – вектор силы трения инструмента о МТ, Fd – вектор усилия, развиваемого приводом.
Основой массажа является механическое деформирование различных участков МТ. Различные виды деформации представляют разные техники и приемы массажа. Эти приемы и техники также подразумевают использование набора различных инструментов. Характерные для массажа приемы и их числовые параметры приведены в таблице 1.
Таблица 1.
Числовые значения параметров массажа в различных приемах
| Приемы массажа | Длина участка, м | Скорость, м/с | Усилие, Н | Площадь пятна контакта, м | Давление, Па | Деформа-ции, мм |
| Поглаживание | 0,01–1,0 | 0,01– 0,3 | <1 | 10-4 – 10-2 | <102 | 1 – 2 |
| Выжимание | 0,01–1,0 | 0,01– 0,2 | 1–100 | 10-4 – 510-3 | 102– 105 | 2–50 |
| Разминание точки | >0,02 | 0,01– 0,3 | 1– 30 | 410-6 – 10-4 | 104 – 106 | 2–50 |
| Придавливаю-щее разминание | 0,01– 0,1 | 0,01– 0,3 | 1–100 | 10-4 – 510-3 | 102 – 105 | 2–50 |
| Оттягивающее разминание | 0,01– 0,1 | 0,01– 0,2 | 1– 50 | – | – | 2–20 |
| Тракции | 0,01–1,0 | 0,01– 0,1 | 1– 50 | – | – | 2–20 |
В работе рассмотрен ряд моделей контактного взаимодействия и предлагается модель МТ, в которой сила реакции N1 МТ при вертикальном давлении на нее с заданным усилием будет равна силе реакции N2 при движении вдоль МТ, прижимаясь с этим же заданным усилием (рис. 4).

Рис. 4. Упрощенная модель мягкой ткани
Для определения границ применимости этой модели были проведены эксперименты с модернизированным роботом РМ-01, оснащённым измерителем усилия вдоль инструментальной оси. Результаты экспериментов позволили указать границы применимости данной модели, выяснить основные причины ошибок.
Для реализации алгоритмов ПСУ для механотерапии необходимо знать заданные усилия и деформации. Такую информацию предоставляют статические характеристики ![]() , где FZ – усилие взаимодействия инструмента с МТ, z – деформация МТ. Для определения этих характеристик были проведены эксперименты на разных участках тела. Например, на рис. 5 представлены три характерные кривые, полученные в трех опытах (кривые 1, 2, 3) при экспериментальном определении зависимостей
, где FZ – усилие взаимодействия инструмента с МТ, z – деформация МТ. Для определения этих характеристик были проведены эксперименты на разных участках тела. Например, на рис. 5 представлены три характерные кривые, полученные в трех опытах (кривые 1, 2, 3) при экспериментальном определении зависимостей ![]() на передней поверхности предплечья. В дальнейших исследованиях при разработке и реализации алгоритмов МТ представлялась упругой средой с нелинейной характеристикой.
на передней поверхности предплечья. В дальнейших исследованиях при разработке и реализации алгоритмов МТ представлялась упругой средой с нелинейной характеристикой.
Приведены методики проведения экспериментов, условия и обработка результатов.

Рис. 5. Зависимость усилия от величины деформации
Статические характеристики МТ отличаются на разных участках, однако, имеют вид, как на рис. 5. Основной причиной нелинейности является то, что МТ опирается на подложку в виде твердой костной ткани, которая имеет упругость большую, чем МТ.
Третья глава посвящена алгоритмам позиционно-силового управления роботами для восстановительной медицины. Робот, как средство механотерапии, должен контролировать показатели контактного механического взаимодействия инструмента робота с телом пациента. Для контроля можно применять, например, системы технического зрения, работающие в различных диапазонах излучения. Такие системы могут позволить увидеть расположение пациента в рабочей зоне робота, структуру МТ и их расположение относительно костных тканей. Однако возникают трудности с обработкой информации и практической реализации.
Массажисты при выполнении процедур руководствуются тактильными ощущениями. Поэтому уместно говорить о проектировании роботов, использующих силовую информацию о рельефе и упруго-вязких свойствах МТ тела пациента. Основными переменными такого вида управления будут координаты контакта X(t) и усилия взаимодействия инструмента робота с МТ пациента F(t) (см. рис. 2).
В общем случае вектор X(t) представляет пространственные координаты положения и ориентации, зависящие от времени, например,
X(t) = (x, y, z, o, a, n)T.
Вектор усилий в общем случае представляется шестимерным
F(t) = (Fx, Fy, Fz, Mx, My, Mz)T,
где Fx, Fy, Fz – усилия вдоль осей неподвижной или инструментальной системы координат, а Mx, My, Mz – моменты вокруг осей.
Тогда задача ПСУ формулируется как обеспечение роботом позиционной траектории X(t) X0(t) и силовой траектории при контактном взаимодействии инструмента робота с телом пациента F(t) F0(t).
Для задания пространственной траектории существуют различные методы: с помощью расчётных узловых точек; с помощью точек или непрерывной кривой, переданных, например, от системы технического зрения; с помощью обученных точек или обученной кривой.
Отмечая неопределённость геометрии и упругих свойств МТ, уместно предложить для ПСУ методы, связанные с предварительным обучением. Для массажа предварительное обучение состоит в запоминании геометрии массируемого участка и распределения упругостей МТ по участку. Тогда каждая обученная точка А будет представлена двенадцатимерным вектором:
A=(x, y, z, o, a, n, Fx, Fy, Fz, Mx, My, Mz).
Таким образом, для пациента процедура будет состоять из двух этапов: обучения геометрии массируемого участка и распределения упругостей, затем позиционного или силового отслеживания программируемых на обученной поверхности массажных траекторий. Такая адаптация подстраивает систему не в процессе исполнения основной процедуры, а предварительно определяя среду, что позволяет выполнять массажные процедуры индивидуально на каждом пациенте. Таким образом, метод обучения обладает свойством интерактивности и универсальности, которые позволяют сохранить работоспособность метода при изменении рельефа от пациента к пациенту.
При силовом обучении точек перед выполнением массажных приёмов инструмент манипулятора в направлении деформирования МТ «погружается» в неё до тех пор, пока показания датчика, измеряющего силовую компоненту в направлении деформирования, не сравняется с задаваемым желаемым усилием. Приводы манипулятора останавливаются, и координаты положения и ориентации вместе с достигнутым заданным усилием запоминаются. В общем случае обученная точка может содержать не только усилие нажатия на МТ, но и усилия от растяжения МТ, её закручивания, изгиба и тангенциальную составляющую.
Эффективность выполнения массажных приёмов зависит не только от точности обеспечения величины заданного усилия, но и от точности ориентации инструмента по отношению к нормали к поверхности. При этом под поверхностью в этих случаях подразумевается не поверхность кожного покрова участка тела 1(x,y,z)=0, а поверхность деформированного с заданным усилием участка МТ 2 (x,y,z)=0 (рис. 6).
Нормаль в точке ![]() может быть представлена уравнением:
может быть представлена уравнением:
 . (1)
. (1)

Рис. 6. Определение нормали к поверхности
Можно определять также косинусы углов наклона нормали N к осям x, y, z:
 ,
,  ,
,  , (2)
, (2)
где:
 . (3)
. (3)
Нормали к поверхности можно вычислять автоматически по измеренным декартовым координатам точек поверхности при первых пробных проходах во время сканирования участка поверхности по намеченной сетке. Эксперименты, проведенные на роботе РМ-01, показали, что отклонения инструментальной оси от нормали к поверхности передней части бедра на угол в пределах ±10° приводят к допустимой ошибке воспроизведения заданного усилия ±18%.
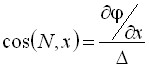
В главе приведены алгоритмы позиционно-силового управления, разработанные в диссертации. Классификация алгоритмов приведена на рис. 7. Большинство представленных алгоритмов разработаны с использованием метода силового обучения.
Для манипулятора, взаимодействующего с вязкоупругой средой, характерны три режима:
- перемещения робота в свободном пространстве при подходе к среде;
- перемещения в среде без выхода из неё;
- контактное взаимодействие со средой.

Рис. 7. Классификация алгоритмов позиционно-силового управления
Третий режим характеризуется переменным контактом с поверхностью среды и возможными упругими отскоками, а также могут возникать большие ударные усилия, колебания и автоколебания. Одной из причин осложнений, свойственных третьему режиму, является нелинейная характеристика F = f(z), приближенно представленная на рис. 8, где 1 – наибольшее возможное сжатие компенсатора; e – толщина МТ в области линейности; КЭ1, КЭ2, КЭ3 – эквивалентные коэффициенты упругости МТ+инструмента, инструмента и костной ткани соответственно:
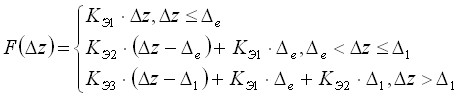 (4)
(4)

Рис. 8. Приближенная характеристика МТ
Для исследования возможных больших ударных воздействий роботов для механотерапии на пациентов была разработана модель эквивалентного линейного привода, отражающего не полную модель робота, а процесс поступательного перемещения инструмента робота в нормальном к мягкой ткани направлении:
 (5)
(5)
где U – напряжение, подаваемое на ДПТ, i – ток якорной обмотки ДПТ, R – сопротивление обмотки якоря, Cv – коэффициент связи между скоростью и ЭДС, z – действительное перемещение манипулятора вдоль инструментальной оси, ze – рельеф поверхности МТ, M – масса подвижных частей манипулятора, FД – движущая сила, F – усилие взаимодействия привода и внешней среды, Cf – коэффициент связи между током и движущей силой, KZ – коэффициент пропорционального регулятора по положению, Kf – коэффициент пропорционального регулятора по усилию, – коэффициент вязкости МТ.
Параметры привода определялись как параметры апериодического звена второго порядка по переходным процессам в предположении линейности привода. В качестве примера эквивалентности рассматривался робот РМ-01. После анализа переходного процесса робота РМ-01, были рассчитаны значения коэффициентов уравнения (5). В рассматриваемой модели привода не учитывается вязкость МТ, которая может в большей степени демпфировать переходные процессы.
На рис. 9 представлены переходные процессы по усилию Fz, полученные моделированием силового привода, инструмент которого погружается в МТ со скоростью Vz0 = 0,05 м/с. Заданное усилие составляло 5, 10, 20 H.. Следует отметить области, в которых Fz = 0, что соответствует отрыву инструмента от среды.
Расчёты и моделирование показывают, как выбирать упругость пружины и скорости подхода инструмента к поверхности МТ, при известных значениях упругости и толщине МТ, линейной зоне силового датчика, инерции приводов робота, чтобы избежать больших ошибок (более 20%) обеспечения заданного усилия.
Большинство предложенных алгоритмов основаны на силовом обучении. При силовом обучении задаются базовые точки, которые затем интерполируются системой управления в некоторую кривую, которая может не совпадать с той траекторией, на которой усилие остается постоянным, что может привести к отклонениям реальных усилий от заданных. Поэтому предпочтительно применять совместное ПСУ.
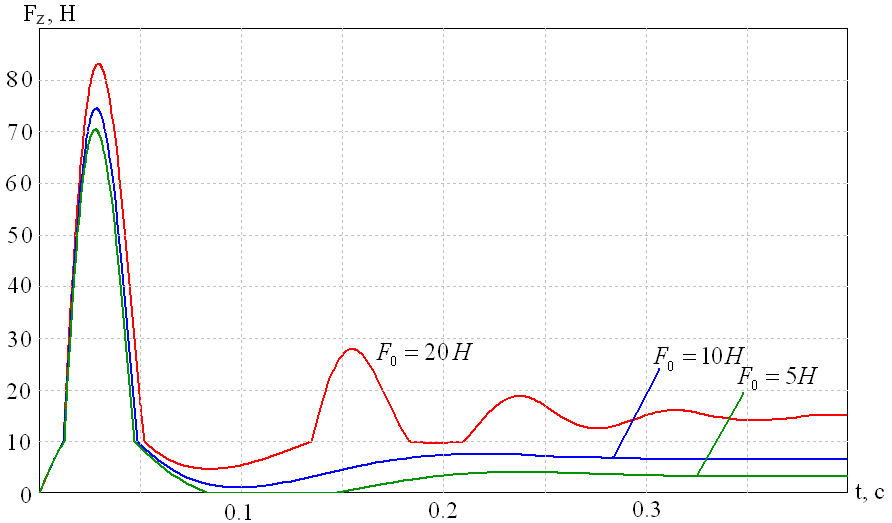
Рис. 9. Усилие при моделировании контакта
Для ряда роботов измерение усилия происходит через заданный шаг перемещения вдоль направления, что приводит к снижению скорости перемещения. Соответственно, была разработана модель планарного дискретного привода, реализующая данный алгоритм. Результаты моделирования позволяют выбирать шаги перемещения робота вдоль заданной траектории X и перемещения вдоль инструментальной оси Z. Необходимо так выбирать шаги, чтобы их отношение z/x было примерно равно тангенсу максимального угла наклона поверхности, а сами шаги не превышали 5 мм.
Все эксперименты проводились на роботе, оснащенным силовым модулем, измеряющим только одну инструментальную компоненту усилия. Однако при движении вдоль МТ всегда возникает тангенциальная составляющая усилия, которую также необходимо отслеживать. Управление по двум составляющим усилия – нормальному и тангенциальному – может быть реализовано путем изменения перемещения робота вдоль инструментальной оси, а также изменением скорости движения вдоль поверхности. Таким образом, при превышении тангенциального усилия некоторого максимального значения (например, при возникновении на пути уплотнений), роботу необходимо «отойти» от поверхности, а также уменьшить скорость движения, чтобы обойти препятствие. В экстренных случаях робот должен остановиться. Алгоритм представлен в виде таблицы 2. В таблице обозначено: +z – прижатие к поверхности на шаг z; –z – отход от поверхности на шаг z; Vn – номинальная скорость движения; V1 – замедленная скорость движения.
Взаимодействиям робота с МТ свойственны недетерминированности, которые могут исследоваться с использованием методов теории случайных процессов и теории нечетких вычислений.
Таблица 2.
Алгоритм управления по двум составляющим усилия
| z | V | z | V | z | V | |
| +z | Vn | 0 | Vn | -z | Vn | |
| 0 | V1 | 0 | V1 | -z | V1 | |
| - z | 0 | -z | 0 | -z | 0 | |
Методы теории случайных процессов используется для оценки точности силового слежения в системах, реализующих предложенные алгоритмы. Причиной ошибок F(t) отслеживания усилия на поверхности пациента является ошибка (t) между интерполированной роботом траектории и той идеальной, на которой обеспечивается точное заданное усилие. Ошибки интерполяции (t) и значения усилия F(t) заранее не определены и не прогнозируемы. Поэтому в расчётах точности силового слежения могут рассматриваться как стационарные случайные процессы
Для того, чтобы создать формирующий фильтр, необходимый для моделирования аналогичного случайного процесса (t), возможны два подхода – прямое определение корреляционной функции с последующей аппроксимацией для создания фильтра, и аппроксимировать корреляционную функцию рядом сразу для создания фильтра. Второй подход оправдан, если априорно известна форма корреляционной функции. В предположении затухающего вида корреляционной функции предлагается разложение в ряд по функциям Лагерра, имеющих вид экспоненциально затухающих кривых, гарантирующий простой фильтр для линейного моделирования.
Тогда корреляционную функцию R() следует представлять рядом ортогональных функций
 .
.
Оценка коэффициентов разложения за время T определяется как
 ,
,
где  представляет выход линейного звена с импульсной переходной функцией Hk().
представляет выход линейного звена с импульсной переходной функцией Hk().
Предполагая, что случайный процесс не имеет выраженных колебательных свойств, его корреляционная функция имеет вид ![]() , где D – дисперсия случайного процесса, – параметр, характеризующий ширину спектральной плотности, и поэтому ортогональные функции можно построить на основе полиномов Лагерра
, где D – дисперсия случайного процесса, – параметр, характеризующий ширину спектральной плотности, и поэтому ортогональные функции можно построить на основе полиномов Лагерра
![]() , где lk(t) – полином Лагерра.
, где lk(t) – полином Лагерра.
Подбором коэффициента следует минимизировать количество членов разложения в ряд. Тогда, подставив =/2, находим корреляционную функцию R().
Определив корреляционную функцию R(), создается формирующий фильтр и проводится моделирование как реальной позиционной системы (робот РМ-01), так и исследования модели позиционно-силового управления, подавая в качестве внешнего возмущающего воздействия эквивалентный случайный сигнал. Это позволит оценить ошибки, возникающие в системах не на короткой выборке одной процедуры, а, в общем случае, на длительном интервале, чтобы оценить предпочтительность совместного, и, в некоторых случаях, раздельного ПСУ. Результаты моделирования и выводы по применению случайных процессов приведены в главе 4.
Оценить ошибки в системах со случайными процессами можно, рассчитав дисперсию силовой ошибки
 ,
,
где S() – спектральная плотность случайного процесса ошибки интерполяции (t),  – передаточная функция ошибки по отношению к внешнему воздействию (t). Другой способ оценки точности – генерирование случайных процессов с последующим моделированием.
– передаточная функция ошибки по отношению к внешнему воздействию (t). Другой способ оценки точности – генерирование случайных процессов с последующим моделированием.
Для управления роботом по двум компонентам усилия было выбрано решение с использованием нечеткой логики. Для реализации алгоритма управления по двум составляющим предложен нечеткий силовой регулятор. Вид функций принадлежности не играет главной роли, важным аспектом применения нечеткого блока является их пересечение. Нечеткий блок вводится в качестве регулятора в систему управления роботом (рис. 10).
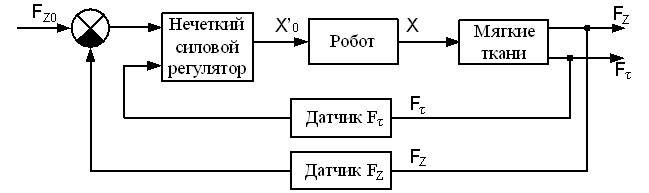
Рис. 10. Система управления по двум составляющим компонентам усилия
Продукционные правила нечеткого вывода Мамдани описывают алгоритм, рассмотренный выше. Зависимость координаты z инструментальной системы координат от тангенциальной F и ошибки нормальной Fz составляющих усилия показаны на рис. 11.

Рис. 11. Зависимость Z от составляющих компонент усилия
Таким образом, в случае малого тангенциального усилия, регулятор отрабатывает только ошибку нормального усилия. Если тангенциальное усилие превысит границы максимально допустимого значения, то, помимо регулирования по нормальной составляющей, будет учитываться и тангенциальная составляющая усилия. Применение аппарата нечетких вычислений позволяет оценивать несколько управляющих воздействий по нескольким входным переменным не скачками, а непрерывно, в зависимости от показаний многокомпонентного датчика.
Четвертая глава является экспериментальной частью работы, где приведены методики выполнения исследований, исследования выполнения движений на различных поверхностях, макетах и пациентах-добровольцах в Российском научном центре восстановительной медицины и курортологии. Алгоритмы, тексты программ и копии протоколов исследований приведены в приложениях.
Динамические эффекты контактного взаимодействия инструмента робота с МТ, наблюдаемые при моделировании, возникают и при манипуляциях на МТ модернизированного робота на основе РМ-01. Были проведены эксперименты с задачей определить максимальную скорость подхода к поверхности (макет) c целью ускорения процесса обучения, при котором силовая ошибка не превышают 20%. Графики изменения усилия при различных скоростях подхода представлены на рис. 12.
Скорость подхода, при которой силовая ошибка не превышает 20% составляет 1 5 мм/с.
Для проверки алгоритма ПСУ с силовым обучением точек и затем их позиционным отслеживанием эксперименты проводились на макете. При реализации алгоритма возникает проблема выбора компромисса между высокой точностью отслеживания траектории (количества обученных точек) и временем, затраченным на обучение. В качестве примера для экспериментов выбран робот РМ-01. В опытах обучались 42 точки, затем манипулятор проходил по ним. При этом использовались как все 42 точки, так и 5 из них. При проходе по 5 точкам наблюдались значительные отклонения усилий от заданных.
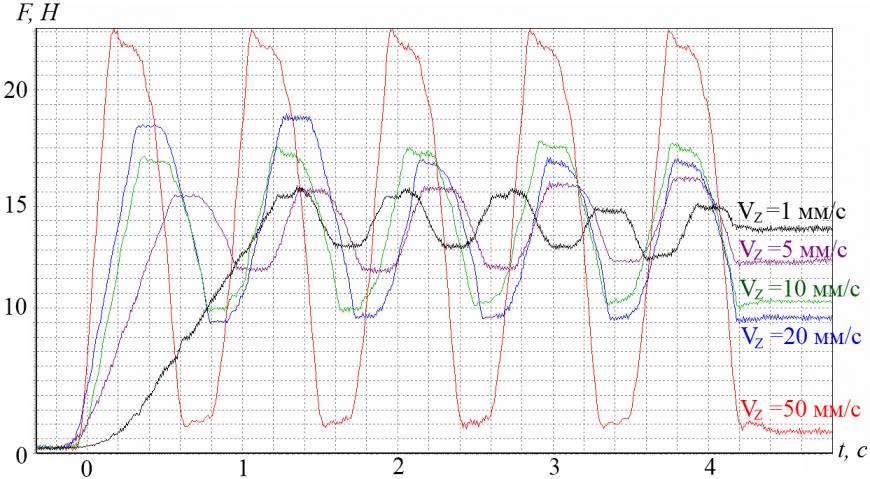
Рис. 12. Изменение усилий при разных скоростях подхода
Аналогичные опыты были проведены на длинных мышцах спины человека. Отклонения усилия при движении по 5 точкам на мягкой ткани не превышали 20%, что позволяет использовать данный алгоритм для выполнения несложных, не требующих высокой точности, манипуляций на мягких тканях.
Алгоритм силового обучения позволяет с заданной точностью отрабатывать усилие воздействия на МТ, однако для этого необходимо обучать большое количество точек, что влечет увеличение временных затрат. Чтобы их избежать желательно после обучения небольшого количества точек отслеживать усилие между ними, то есть, использовать совместное ПСУ. Для сравнения этих двух методов было проведено моделирование позиционного прохода по 40 обученным точкам (для примера с РМ-01) и проход с силовой коррекцией по 5, 7, 9 и 11 обученным точкам. Количество точек в моделях задавалось путем введения различных ошибок интерполяции (t) между обученными точками и действительным рельефом МТ. Чтобы ввести эти ошибки в модель, по методике, описанной в главе 3, была определены их корреляционные функции и созданы формирующие фильтры. Вводя случайные процессы с определенными параметрами в систему раздельного ПСУ и совместного ПСУ с П и ПИ-регуляторами, можно оценить ошибки, возникающие в них (рис. 13) в зависимости от количества обученных точек N.
При определенном количестве обученных точек среднеквадратические ошибки в позиционной системе и позиционно-силовой системе с П-регулятором сравниваются. Таким образом, выбрав необходимое количество точек, возможно использовать метод силового обучения для выполнения процедур механотерапии на МТ.
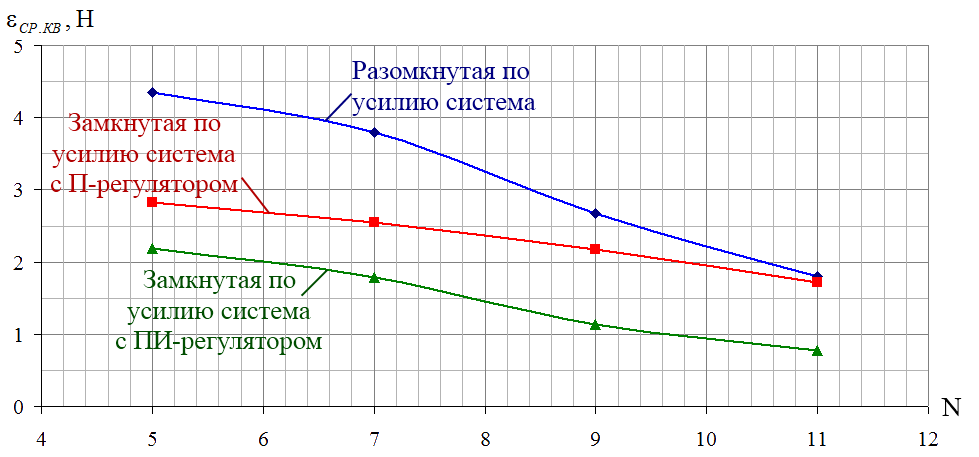
Рис. 13. Зависимости среднеквадратической ошибки в позиционной и позиционно-силовой системах от количества обученных точек
В главе приведены алгоритмы, реализованные на модернизированном роботе на базе РМ-01 в программах, составленных для различных участков и пациентах, различной комплекции. Тексты программ приведены в приложении.
Также в главе сформулированы требования, предъявляемые к проектированию роботов для механотерапии с точки зрения ПСУ:
- число приводов: специализированные роботы для определенных участков – один-два, для универсального – шесть (ангулярная система координат)
- рабочая зона: для специализированных роботов – в зависимости от размера участка. Например, для робота с планарной системой координат, выполняющего поглаживания на задней поверхности тела пациента, длина рабочей зоны должна быть не менее длины тела пациента
- управление по усилию подразумевает использование силового датчика, который в общем случае измеряет шесть компонент усилия
- развиваемое усилие: в зависимости от групп пациентов – спортсмены – до 300Н, дети – до 30Н (масса, длина участка, вид приема)
- безопасность должна обеспечиваться ограничением по усилию, податливыми звеньями манипулятора
- интерфейс оператора должен представлять собой оконный интерфейс с отображением информации об усилиях, текущих процедурах, состоянии пациента. Пульт ручного управления манипулятором должен быть расширен с добавлением возможности контроля усилия при подходе к телу пациента.
Данные требования к проектированию роботов для механотерапии расширяются с учетом биотехнического управления.
Основные результаты и выводы
В работе получены следующие научно-технические результаты
- Определены требования, предъявляемые к робототехнической системе для механотерапии.
- Предложен контур позиционно-силового управления робототехнической системой для восстановительной медицины.
- Разработаны и исследованы модели взаимодействия мягких тканей и инструмента робота.
- Разработаны и апробированы алгоритмы позиционно-силового управления робототехнической системой для манипуляций на мягких тканях и суставах, выявлены ограничения и предложены рекомендации по реализации алгоритмов.
- Разработаны конструкции силовых модулей робота.
- Разработана программно-аппаратная робототехническая система для выполнения манипуляций на мягких тканях на модернизированном роботе на базе промышленного робота РМ-01.
- Предложенные в диссертации алгоритмы, реализующие позиционно-силовое управление, безопасного отключения и отвода руки исполнительного устройства обеспечивают адекватное и безопасное функционирование робототехнической биотехнической системы в условиях неполноты и неточности информации о параметрах мягких тканей. Разработанная система безопасности позволяет исключить причинение дискомфорта, травмирования пациента.
- Проведенные совместные испытания с медицинскими специалистами позволили сформулировать ряд методических аспектов при проведении процедур механотерапии.
Основное содержание диссертации опубликовано в следующих работах:
- Головин В.Ф., Архипов М.В., Журавлев В.В. Метод силового обучения при планировании траекторий робота для восстановительной медицины // Мехатроника, автоматизация, управление. 2009. №10. С. 29-30.
- Головин В.Ф., Архипов М.В., Журавлев В.В. Проблемы развития робототехники в восстановительной медицине // Мехатроника, автоматизация, управление. 2009. №9. С. 49 – 53.
- Модуль силовой адаптации медицинского робота / А.Н. Разумов [и др.] // Информационно-измерительные и управляющие системы. 2006. № 1-3. С. 137-145.
- Головин В.Ф., Журавлев В.В. Управление медицинским роботом в условиях неопределённости // Экстремальная робототехника: Труды 17-й Всероссийской научно-технической конференции. СПб., 2006. С. 282-287.
- Журавлев В.В. Позиционно-силовое управление медицинским роботом в условиях неопределенности // Актуальные проблемы защиты и безопасности: Труды 18-й Всероссийской научно-технической конференции Экстремальная робототехника. СПб., 2007. С. 226-231.
- Журавлев В.В., Головин В.Ф. Алгоритмы позиционно-силового управления роботом с силовым обучением для механотерапии // 3-я мультиконференция по проблемам управления: Материалы 7-й научно-технической конференции «Мехатроника, автоматизация, управление» (МАУ-2010). СПб., 2010. С. 179-183.
- Adaptive force module for medical robots / A.Razumov [et al.] // IARP: Proceedings of The Workshop on Adaptive and Intelligent robots: Present and Future. M., 2005. P. 70-82.
- Архипов М.В., Журавлев В.В. Управление медицинским роботом в условиях неопределенности // Труды МГИУ. 2006. С. 45-47.
- Биоуправляемый массажный робот. / М.В. Архипов [и др.] // Патент на полезную модель № 2011100884 от 16.03.2011.