

Конструкторско-технологическое обеспечение рациональных параметров судовых кранов с системой пространственной стабилизации грузового подвеса
Обложка_автореферата Общая_характеристика_работы Основное_содержание_работы Основные_публикации_по_теме_работы Заключение
На правах рукописи
ГЕОРГИЕВ
Александр Анатольевич
КОНСТРУКТОРСКО-ТЕХНОЛОГИЧЕСКОЕ ОБЕСПЕЧЕНИЕ РАЦИОНАЛЬНЫХ ПАРАМЕТРОВ СУДОВЫХ КРАНОВ С СИСТЕМОЙ ПРОСТРАНСТВЕННОЙ СТАБИЛИЗАЦИИ ГРУЗОВОГО ПОДВЕСА
Специальности – 05.08.04 «Технология судостроения, судоремонта и организация судостроительного производства»,
05.08.05 «Судовые энергетические установки и их элементы (главные и вспомогательные)»
АВТОРЕФЕРАТ
диссертации на соискание ученой степени кандидата технических наук
Санкт-Петербург – 2013
Работа выполнена на кафедре «Технология судового машиностроения» федерального государственного бюджетного образовательного учреждения высшего профессионального образования «Санкт-Петербургский государственный морской технический университет».
Научный руководитель: Доктор технических наук, доцент
Пиль Эдуард Анатольевич
Официальные оппоненты: Скороходов Дмитрий Алексеевич
доктор технических наук, профессор
Института проблем транспорта
им. Н.С.Соломенко РАН
Калач Сергей Владимирович
кандидат технических наук, с.н.с.
ОАО «Концерн НПО «Аврора»
Ведущая организация: ОАО «Гипрорыбфлот», г. Санкт-Петербург
Защита диссертации состоится «26» марта 2013г. в «14.00» ч. на заседании диссертационного совета Д.212.228.05 при ФГБОУ ВПО «Санкт-Петербургский государственный морской технический университет» по адресу: 190008, г. Санкт-Петербург, ул. Лоцманская, д. 3, ауд. А-313.
С диссертацией можно ознакомиться в библиотеке Санкт-Петербургского государственного морского технического университета.
Автореферат разослан « » 2013г.
Учёный секретарь
диссертационного совета Д212.228.05 Муравьёв А.Н.
к.т.н., доцент
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность работы
Повышение конкурентоспособности отечественной продукции судового машиностроения является одной из основных задач производителей подъемно-транспортного оборудования в современных рыночных условиях. Нарастающий объем перевозок многоцелевых грузов и контейнеров морским транспортом во многом лимитируется ростом сопутствующих затрат, связанных с использованием подъемно-транспортных устройств в перевозочном процессе. Степень их использования и параметры определяют длительность процесса перевозки грузов, технологические простои судов, вагонов, автомобильного транспорта. Рабочий режим грузоподъемного крана обеспечивается сочетанием движений механизмов подъема груза, поступательного или вращательного движения крана. Все операции строго локальны по пути перемещения (груза, механизма) и по нагрузкам. Из этого вытекает необходимость не допускать нагрузок, опасных для прочности узлов. Традиционно такая гарантия основана на применении автоматических приборов безопасности. Однако пути снижения степени воздействия этих нагрузок на конструкции крана в настоящий момент не достаточно исследованы.
Отмеченные особенности обуславливают целесообразность применения в конструкции устройств, предназначенных для компенсации, преобразования или рассеивания энергии колебания нока, что определяет актуальность выполненной работы и её связь с задачами, поставленными перед организациями машиностроительной отрасли.
Целью диссертационной работы является рационализация параметров судового крана, предназначенного для работы в условиях волнения и повышение производительности проведения грузовых операций в открытом море.
В соответствии с поставленной целью, в диссертационной работе решались следующие задачи:
- анализ и обоснование выбора конструкции крана;
- исследование возможностей его применения;
- уточнение математических моделей основных процессов подъема грузов и напряженных состояний механизмов крана;
- анализ и обоснование разработанной системы стабилизации груза с последующей оценкой эффекта от ее применения в конструкции крана.
Научная новизна работы состоит в:
- обосновании принципиально новой системы стабилизации груза без применения специальных демпфирующих устройств, позволяющей существенно повысить безопасность проведения грузовых работ и производительность судового крана.
- откорректированные уравнения динамики работы в наиболее неблагоприятных условиях эксплуатации судовых кранов;
- откорректированная математическая модель системы дифференциальных уравнений этапов подъема груза с помощью судового крана новой конструкции;
- методика расчёта основных параметров системы стабилизации пространственного положения грузового подвеса, позволяющая исключить вынужденное значительное снижение грузоподъемности, вызванное волнением моря, а также повысить производительность проведения грузовых операций.
Практическая ценность работы
Разработанные модель и методика позволили выполнить техническое и рабочее проектирование кранов, обеспечивающих стабилизацию груза и позволяющих снизить степень воздействия этих нагрузок на конструкции крана, а также повысить производительность проведения грузовых операций в море.
Внедрение результатов работы
Основные результаты работы внедрены на предприятии ЗАО «ЦНИИ СМ» при рабочем проектировании крана КЭГ20031, а также при техническом проектировании кранов КЭГ16020/10034 и КЭГ5016.
Апробация работы
Результаты работы докладывались на II Российской научно-практической конференции судостроителей 2010г., Молодежной научно-практической конференции «Взгляд в будущее-2011»
Публикации
Основные теоретические и практические результаты диссертации опубликованы в 21 научной работе, все по теме диссертации. Из них 21 статья; 1 работа выполнена без соавторов, авторская доля в остальных от 30% до 70%. В рецензируемых научных журналах и изданиях опубликовано 16 работ, из них 1 работа без соавторов, авторская доля в остальных от 30% до 70%.
Структура и объём диссертации
Диссертация состоит из введения, пяти глав, заключения, библиографического списка из 64 наименований, содержит 101 страницу основного текста, 45 рисунков и 4 таблицы.
ОСНОВНОЕ СОДЕРЖАНИЕ РАБОТЫ
Во введении приведен прогноз спроса продукции судового машиностроения на 2012–2016 годы, выполненный на основании программы строительства гражданской морской техники. В настоящий момент изготовление значительной части продукции осуществляется по документации, разработанной в конце 80-х годов, что в значительной степени определяет уровень конкурентоспособности отечественных разработок. В результате обоснована актуальность выполняемой работы, определена цель работы и поставлены задачи, обеспечивающие достижение поставленной цели.
В первой главе рассмотрены различные исполнения грузовых устройств, устанавливаемых на судах. Приведено описание объекта исследования, а также требования, предъявляемые к нему. Поставлена задача исследования.
Анализ условий эксплуатации судовых кранов показывает, что:
- в процессе подъема (или опускания) груза возникающие ускорения вызывают дополнительные динамические нагрузки. Величина их в зависимости от значения ускорений различна и достигает в среднем 10% массы груза. При колебаниях груза и стрелы крана возникают кратковременные моменты повышенной нагрузки на канат и кран.
- опытная эксплуатация в море показывает, что ряд явлений, возникающих в процессе взятия грузов с волны, а также при погрузке на другое судно, может быть объяснён лишь при учёте динамических свойств системы, обусловленных качкой.
- для исследования и расчёта механизмов судового крана необходимо иметь его математическую модель, достоверно описывающую его свойства и своей сложностью не препятствующую получению необходимых результатов.
- поскольку перемещения носят колебательный характер, то исследование динамических процессов сводится к задаче о вынужденных колебаниях нелинейной механической системы с несколькими степенями свободы.
В соответствии с требованиями Правил по грузоподъемным устройствам морских судов Российского морского регистра судоходства, в таблице 1 приведены рекомендуемые значения коэффициента динамичности ![]() при работе судового крана в условиях волнения с разной балльностью, в том числе - в защищенной акватории.
при работе судового крана в условиях волнения с разной балльностью, в том числе - в защищенной акватории.
Эти значения получены на основе максимально возможных параметров при данном волнении и массе груза, с учетом запасов прочности конструкции и механизмов судового крана, а также малой вероятности возникновения максимально возможных нагрузок.
Таблица 1 Рекомендуемые значения коэффициента динамичности
| Масса груза, т | ||||||
| 0 | 1 | 2 | 3 | 4 | 5 | |
| 0,5 | 1,85 | 1,85 | 2,85 | 4,00 | 5,35 | 6,60 |
| 1,0 | 1,60 | 1,60 | 1,85 | 2,40 | 3,15 | 4,10 |
| 2,0 | 1,40 | 1,40 | 1,60 | 2,00 | 2,60 | 3,25 |
| 3,0 | 1,25 | 1,25 | 1,40 | 1,65 | 2,00 | 2,45 |
| 4,0 | 1,20 | 1,20 | 1,25 | 1,50 | 1,80 | 2,20 |
| 5,0 | 1,15 | 1,15 | 1,20 | 1,40 | 1,65 | 1,90 |
Судовой кран обычной конструкции можно допускать к работе на волнении, ограничивая скорость подъема груза не более 30 м/мин и грузоподъемность крана - на основе соответствующего коэффициента динамичности.
При работе судового крана в порту (на тихой воде) и при подъеме груза с подхватом с воды либо с причала, если скорость подъема превышает 60 м/мин, значение коэффициента динамичности должно определяться расчетом.
Для судовых кранов, работающих длительное время и систематически в условиях волнения, значительное снижение грузоподъемности нерационально.
Такие краны должны быть оснащены следящим или ограничивающим нагрузки устройством.
Предшествующие исследования были посвящены вопросам исследования следящих устройств, позволяющих свести к минимуму влияние динамических явлений при отрыве груза от палубы второго судна, либо при подъеме его с волны.
Проблема стабилизации пространственного положения подвеса с грузом посредством входящих в состав оборудования крана специальных устройств и механизмов, работающих при включении или постоянно в автоматическом режиме и выполняющих функции компенсации, подавления или рассеивания энергии неблагоприятных воздействий факторов среды в настоящий момент исследована недостаточно.
Объектом исследования настоящей диссертационной работы являются параметры типовых узлов такого вида судового комплектующего оборудования как судовой кран, предназначенный для выполнения грузовых операций с грузами как общего назначения, так и с разрядными, в море, а также пути увеличения производительности проведения погрузочно-разгрузочных работ в условиях качки и пути снижения массогабаритных параметров судового крана.
В настоящей диссертационной работы на основе анализа обобщенного математического описания работы судового крана в условиях качки необходимо провести исследование динамических явлений, возникающих при его эксплуатации, и разработать систему стабилизации груза без применения специальных демпфирующих устройств, позволяющую снизить степень воздействия этих нагрузок на конструкции крана.
Во второй главе Выполнен анализ сочетания нагрузок и проведено исследование динамических воздействий при работе судового крана в условиях волнения.
На рис. 1 представлена расчётная схема процесса подъема судовым краном груза с палубы второго судна.
При теоретическом исследовании приняты следующие допущения и упрощения:
- суда расположены лагом к волне. Судно с грузом расположено со стороны защищенного от волнения борта судна с краном;
- в акватории принято двухмерное регулярное волнение по закону
 . Принят регулярный характер волнения и качки в течение всего периода подъема;
. Принят регулярный характер волнения и качки в течение всего периода подъема; - не учитывается воздействие дифрагированных волн на качку обоих судов;
- в математическую модель процесса подъема введена килевая качка, поскольку и при расположении судов лагом наблюдается ее наличие;
- принято, что при перегрузочных операциях оба судна не имеют хода, не рыскают и не совершают поперечных горизонтальных движений;
- не учитывается влияние швартовных канатов на качку обоих судов, если суда ошвартованы между собой при перегрузке.
При исследовании считаются известными:
- необходимые параметры крана, груза, судна с краном и второго судна;
- начальный момент времени подъема груза.
Стрела крана принимается расположенной перпендикулярно к ДП судна.
В расчетную, схему движения сосредоточенных масс входят следующие четыре:
![]() - приведенная масса привода механизма подъема. Место
- приведенная масса привода механизма подъема. Место ![]() - приведенная масса привода механизма подъема.
- приведенная масса привода механизма подъема.
Место проведения - точка касания набегающей ветки грузового каната с первым от гака блоком на ноке стрелы;
![]() и
и ![]() - массы соответственно груза, судна с краном и сосредоточенная в ЦТ стрелы судового крана.
- массы соответственно груза, судна с краном и сосредоточенная в ЦТ стрелы судового крана.
Такая четырехмассовая схема с учетом раскачивания груза после его отрыва от палубы второго судна, а также при наличии килевой качки, достаточно точно описывает происходящие процессы при подъеме груза на волнении и, как частный случай, на тихой воде. Если судно небольшое, заметно влияние работы крана на его положение.
Ординаты судов ![]() отсчитываются в неподвижной системе координат
отсчитываются в неподвижной системе координат
![]() ,основная плоскость
,основная плоскость ![]() которой совпадает с плоскостью невозмущенной поверхности воды.
которой совпадает с плоскостью невозмущенной поверхности воды.
Бортовая ![]() и килевая
и килевая ![]() качки судна с краном отсчитываются в подвижной системе координат
качки судна с краном отсчитываются в подвижной системе координат ![]() , начало которой совпадает с ЦТ судна. Оси
, начало которой совпадает с ЦТ судна. Оси ![]() и
и ![]() параллельны осям неподвижной системы координат
параллельны осям неподвижной системы координат ![]() . С некоторым приближением принято, что бортовая качка
. С некоторым приближением принято, что бортовая качка ![]() совершается вокруг оси
совершается вокруг оси ![]() , килевая качка - вокруг оси
, килевая качка - вокруг оси ![]() .
.
В подвижной системе координат GXYZ, связанной с судном с краном, отсчитываются следующие три движения: ![]() - перемещение приведенной массы привода
- перемещение приведенной массы привода ![]() . При подъеме
. При подъеме ![]() - колебание стрелы массой
- колебание стрелы массой ![]() относительно палубы;
относительно палубы; ![]() - угол раскачивания груза при подъеме
- угол раскачивания груза при подъеме![]() и
и![]() направлены вверх от плоскости
направлены вверх от плоскости![]()
![]() - крен на тот борт, со стороны которого находится судно с грузом;
- крен на тот борт, со стороны которого находится судно с грузом; ![]() - соответствует дифференту судна с краном на корму,
- соответствует дифференту судна с краном на корму, ![]() - наклонению стрелы от ненагруженного положения к палубе;
- наклонению стрелы от ненагруженного положения к палубе; ![]() - раскачиванию груза к борту судна с краном.
- раскачиванию груза к борту судна с краном.
Для второго судна введены следующие дополнительные обозначения:![]() - масса второго судна;
- масса второго судна; ![]() - угол крена, угловая скорость и угловое ускорение второго судна при его бортовой качке;
- угол крена, угловая скорость и угловое ускорение второго судна при его бортовой качке; ![]() - ордината, вертикальная скорость и вертикальное ускорение ЦТ второго судна при его вертикальной качке;
- ордината, вертикальная скорость и вертикальное ускорение ЦТ второго судна при его вертикальной качке; ![]() - угол дифферента, угловая скорость и угловое ускорение второго судна при его килевой качке;
- угол дифферента, угловая скорость и угловое ускорение второго судна при его килевой качке; ![]() - расстояние от ЦТ груза до плоскости, параллельной миделю второго судна и проходящей через его центр тяжести;
- расстояние от ЦТ груза до плоскости, параллельной миделю второго судна и проходящей через его центр тяжести; ![]() - ордината, вертикальная скорость и вертикальное ускорение ЦТ груза.
- ордината, вертикальная скорость и вертикальное ускорение ЦТ груза.

Рис.1. Расчетная схема процесса подъема судовым краном груза с палубы второго судна
Основные обозначения и зависимости, использованные при составлении уравнений, следующие: Спр - приведенная жесткость ходовой ветви грузового каната![]() ; к - кратность грузового полиспаста; F - суммарная упругая нагрузка в канате;
; к - кратность грузового полиспаста; F - суммарная упругая нагрузка в канате; ![]() - упругое удлинение ходовой ветви грузового каната на участке между ноком и барабаном лебедки,
- упругое удлинение ходовой ветви грузового каната на участке между ноком и барабаном лебедки, ![]() - вертикальное перемещение нока стрелы относительно палубы судна;
- вертикальное перемещение нока стрелы относительно палубы судна;![]() - плечо момента силы F относительно оси; Н0 - вертикальное расстояние от ЦТ судна до оси блока на ноке стрелы на тихой воде (без крена).
- плечо момента силы F относительно оси; Н0 - вертикальное расстояние от ЦТ судна до оси блока на ноке стрелы на тихой воде (без крена).
![]() - уравнения волны у ДП второго судна;
- уравнения волны у ДП второго судна;
![]() - у ДП судна с краном.
- у ДП судна с краном.
Сдвиг фазы ![]() определить нетрудно, если известна круговая частота волны
определить нетрудно, если известна круговая частота волны ![]() и горизонтальное расстояние между ДП обоих судов
и горизонтальное расстояние между ДП обоих судов ![]() (см. рис.1). В дальнейшем принято
(см. рис.1). В дальнейшем принято ![]() .
.
Процесс подъема груза судовым краном на волнении условно разделен на три характерных этапа и протекает во времени следующим образом:
первый ![]() - от момента включения механизма подъема до момента
- от момента включения механизма подъема до момента ![]() полного выбирания ослабления грузового каната.
полного выбирания ослабления грузового каната.
Для удобства условно принято, что начальный момент t = 0 совпадает с моментом нахождения второго судна на вершине волны. Выбор начального момента первого этапа (t = 0) не влияет на значение полученных динамических нагрузок, так как на первом этапе подъема ![]() . При подъеме на волнении ослабление чалочных канатов и грузового каната является обязательным условием, позволяющим произвести остропление груза, в результате чего подъем груза с палубы второго судна, возможен только с подхватом;
. При подъеме на волнении ослабление чалочных канатов и грузового каната является обязательным условием, позволяющим произвести остропление груза, в результате чего подъем груза с палубы второго судна, возможен только с подхватом;
второй ![]() - от момента
- от момента ![]() до
до ![]() «отрыва» груза от палубы второго судна. Момент t2 определяется из уравнения
«отрыва» груза от палубы второго судна. Момент t2 определяется из уравнения ![]()
третий ![]() - от момента
- от момента ![]() до момента остановки механизма подъема
до момента остановки механизма подъема
(![]() ) после подъема груза на необходимую высоту.
) после подъема груза на необходимую высоту.
На первом этапе качка обоих судов в условиях регулярного волнения описывается уравнениями:
- Волны у ДП второго судна и судна с краном:
 и
и
![]() ;
;
- Вертикальной качки ЦТ второго судна:

- Бортовой качки второго судна:

- Килевой качки второго судна на всех этапах подъема (при наличии килевой качки):

- Вертикального движения ЦТ груза на первом этапе подъема:
 , где
, где  при кормовом расположении груза от ЦТ;
при кормовом расположении груза от ЦТ;  - при носовом расположении;
- при носовом расположении; - Вертикальной качки ЦТ судна с краном:

- Бортовой качки судна с краном:

Килевая качка судна с краном выражается уравнением ![]() на всех этапах подъема груза при расстоянии l от ЦТ груза до плоскости, параллельной миделю судна с краном и проходящей через его ЦТ,
на всех этапах подъема груза при расстоянии l от ЦТ груза до плоскости, параллельной миделю судна с краном и проходящей через его ЦТ, ![]() - при кормовом расположении оси крана от ЦТ;
- при кормовом расположении оси крана от ЦТ; ![]() - при носовом расположении;
- при носовом расположении;![]()
![]()
![]()
![]()
С помощью приведенных выражений определяются начальные условия второго этапа подъема при ![]()
Для подъема груза с палубы второго судна на втором этапе при расчетах приняты обозначения:
![]() - упругое удлинение ходовой ветви каната от грузового блока до барабана механизма подъема;
- упругое удлинение ходовой ветви каната от грузового блока до барабана механизма подъема;![]() - перемещение, скорость и ускорение приведенной массы привода
- перемещение, скорость и ускорение приведенной массы привода ![]() ; для удобства при
; для удобства при ![]() принято
принято ![]() ;
;![]() ;
; ![]() - ордината, скорость и ускорение массы груза при ее вертикальном движении;
- ордината, скорость и ускорение массы груза при ее вертикальном движении; ![]() - угол крена, угловая скорость и угловое ускорение судна при его бортовой качке;
- угол крена, угловая скорость и угловое ускорение судна при его бортовой качке;![]() - ордината, вертикальная скорость и вертикальное ускорение ЦТ судна;
- ордината, вертикальная скорость и вертикальное ускорение ЦТ судна; ![]() - угловое перемещение, угловая скорость и угловое ускорение стрелы относительно палубы;
- угловое перемещение, угловая скорость и угловое ускорение стрелы относительно палубы; ![]() - угол дифферента, угловая скорость и угловое ускорение судна при его килевой качке; F2(t) - суммарная упругая нагрузка в несущих участках грузового каната на втором этапе;
- угол дифферента, угловая скорость и угловое ускорение судна при его килевой качке; F2(t) - суммарная упругая нагрузка в несущих участках грузового каната на втором этапе;
![]()
![]()

![]()
![]()
![]()
где: ![]() - намотанная на барабане часть длины каната при
- намотанная на барабане часть длины каната при ![]() , которая не вызывает упругого удлинения, а расходуется на выбирание упругого удлинения остальных
, которая не вызывает упругого удлинения, а расходуется на выбирание упругого удлинения остальных ![]() несущих ветвей грузового каната;
несущих ветвей грузового каната; ![]() - ордината ЦТ груза в начале второго этапа.
- ордината ЦТ груза в начале второго этапа.
На основе принципа Д'Аламбера и линейной теории качки судна на регулярном волнении получены дифференциальные уравнения:
- Движения приведенной массы привода
 :
:
![]()
где: ![]() - тяговое усилие подъемного механизма в месте приведения
- тяговое усилие подъемного механизма в месте приведения ![]() ;
;
- Бортовой качки второго судна (массой
 ):
):

где: ![]() - момент инерции массы второго судна относительно продольной оси
- момент инерции массы второго судна относительно продольной оси ![]() , проходящей через его ЦТ;
, проходящей через его ЦТ; ![]() - момент инерции массы присоединенной к второму судну воды при его бортовой качке относительно оси
- момент инерции массы присоединенной к второму судну воды при его бортовой качке относительно оси![]() ;
;![]() - начальная поперечная метацентрическая высота второго судна; D2 - массовое водоизмещение второго судна;
- начальная поперечная метацентрическая высота второго судна; D2 - массовое водоизмещение второго судна;
- Вертикальной качки ЦТ второго судна:

где: ![]() - масса присоединенной к второму судну воды при его вертикальной качке;
- масса присоединенной к второму судну воды при его вертикальной качке; ![]() - безразмерное отношение;
- безразмерное отношение; ![]() - приведенная (эффективная) полувысота волны;
- приведенная (эффективная) полувысота волны;
- Бортовой качки судна с краном (массой
 ):
):

![]()
- Вертикальной качки ЦТ судна с краном:

где: ![]() - коэффициент демпфирования;
- коэффициент демпфирования; ![]() - вертикальное расстояние от ЦТ судна с краном до его грузовой ватерлинии на тихой воде.
- вертикальное расстояние от ЦТ судна с краном до его грузовой ватерлинии на тихой воде. ![]() имеет знак ( + ), если ЦТ находится вверх от грузовой ватерлинии;
имеет знак ( + ), если ЦТ находится вверх от грузовой ватерлинии;
- Колебания стрелы массой m4:
![]()
![]()
Получается общая математическая модель второго этапа подъема в окончательном виде, т. е. как система из шести дифференциальных уравнений второго порядка. После решения системы будем иметь как функции времени: ![]() и
и ![]() . В результате чего получаются как функция времени упругие нагрузки в канате
. В результате чего получаются как функция времени упругие нагрузки в канате ![]() .
.
Из условия ![]() определяется конец второго этапа подъема
определяется конец второго этапа подъема ![]() - момент, в котором груз отрывается от палубы второго судна.
- момент, в котором груз отрывается от палубы второго судна.
Вертикальное ускорение ЦТ груза на втором этапе подъема ![]() получается после двойного дифференцирования выражения
получается после двойного дифференцирования выражения ![]() .
.
При ![]() с, определяются начальные условия третьего этапа:
с, определяются начальные условия третьего этапа:

![]()
![]() и
и ![]() .
.
Для описания третьего этапа подъема введем дополнительные обозначения:
![]() - суммарная упругая нагрузка в грузовом канате на третьем этапе подъема;
- суммарная упругая нагрузка в грузовом канате на третьем этапе подъема; ![]() угол раскачивания груза относительно вертикали в плоскости, перпендикулярной к оси
угол раскачивания груза относительно вертикали в плоскости, перпендикулярной к оси ![]() ; угловая скорость и угловое ускорение раскачивания;
; угловая скорость и угловое ускорение раскачивания; ![]() - вертикальное расстояние от оси блока на ноке стрелы до ЦТ груза в начальный момент третьего этапа;
- вертикальное расстояние от оси блока на ноке стрелы до ЦТ груза в начальный момент третьего этапа; ![]() - вертикальное расстояние от оси блока на ноке стрелы до ЦТ судна; М - длина отрезка от оси блока на ноке стрелы до ЦТ судна;
- вертикальное расстояние от оси блока на ноке стрелы до ЦТ судна; М - длина отрезка от оси блока на ноке стрелы до ЦТ судна; ![]() - угол между этим отрезком и плоскостью грузовой ватерлинии на тихой воде;
- угол между этим отрезком и плоскостью грузовой ватерлинии на тихой воде;
![]()




![]()
Дифференциальные уравнения:
- Движений приведенной массы привода:
![]()
- Движения массы груза
 по оси каната:
по оси каната:
![]()
где: ![]() - горизонтальная составляющая ускорения нока стрелы. Длина качающегося участка каната
- горизонтальная составляющая ускорения нока стрелы. Длина качающегося участка каната ![]() определена приближенно, без учета упругости самого каната и влияния обратной связи:
определена приближенно, без учета упругости самого каната и влияния обратной связи:
![]()
![]() определяется из выражения
определяется из выражения ![]() при
при ![]()
- Бортовой качки судна:
![]()
![]()
- Вертикальной качки ЦТ судна:

- Колебания стрелы массой m4:

![]()
- Движения массы груза
 в направлении, перпендикулярном к канату:
в направлении, перпендикулярном к канату:


Математическая модель третьего этапа подъема в окончательном виде получается как система из шести дифференциальных уравнений второго порядка.
Решение системы третьего этапа подъема дает значения неизвестных функций времени ![]() и
и ![]() . В результате этого получается как функция времени упругая нагрузка в канате
. В результате этого получается как функция времени упругая нагрузка в канате ![]() .
.
Поскольку системы дифференциальных уравнений второго и третьего этапов подъема получаются соответственно из шести дифференциальных уравнений второго порядка, нелинейных, неоднородных, с переменными коэффициентами, их решение в общем виде в квадратурах классическими способами невозможно.
При этом характерной особенностью третьего этапа является раскачивание груза в вертикальной плоскости, перпендикулярной к оси ![]() . Поэтому проблема стабилизации пространственного положения подвеса с грузом в процессе эксплуатации судового крана при разовых, случайных или регулярных воздействиях факторов среды может свести к минимуму периодические динамические влияния на конструкции крана.
. Поэтому проблема стабилизации пространственного положения подвеса с грузом в процессе эксплуатации судового крана при разовых, случайных или регулярных воздействиях факторов среды может свести к минимуму периодические динамические влияния на конструкции крана.
В третьей главе представлена методика расчёта основных параметров системы стабилизации пространственного положения грузового подвеса. Она состоит из расчёта траектории переносного движения нока крана и анализа технических решений подвеса.
Варьирование вылета стрелы и высоты подвеса груза по отношению к ноку крана могут быть существенным образом ограничены штатными условиями выполнения грузовых операций. Длины подвеса груза в процессе выполнения операций могут принимать «критические» значения, при которых частота собственных колебаний подвеса совпадает с одной из возможных частот вынужденных колебаний нока крана, обусловленных качкой кранового судна на волнении до трех баллов.
Проекции абсолютного перемещения нока при малом угле качки ![]()
![]()
![]() на оси неподвижной системы координат, совмещенной с центром тяжести (ЦТ) судна, определяются следующими выражениями:
на оси неподвижной системы координат, совмещенной с центром тяжести (ЦТ) судна, определяются следующими выражениями:
![]()
![]() ;
;
![]()
![]() ,
,
где: ![]() r - величина радиуса - вектора из начала координат до нока крана;
r - величина радиуса - вектора из начала координат до нока крана;
где: ![]()
![]() - величина радиуса - вектора из начала координат до нока крана;
- величина радиуса - вектора из начала координат до нока крана;
![]()
![]() - абсолютное перемещение нока при качении судна на угол
- абсолютное перемещение нока при качении судна на угол ![]()
![]() ;
;
![]()
![]() - угол между неподвижной вертикалью и радиусом - вектором
- угол между неподвижной вертикалью и радиусом - вектором ![]()
![]() ;
;
![]()
![]() - амплитуда бортовой качки судна;
- амплитуда бортовой качки судна;
![]()
![]() - угловая частота бортовой качки судна.
- угловая частота бортовой качки судна.
Принято положительное направление углов против часовой стрелки.
Если принять ординату шпора стрелы относительно ЦТ равной 18м, то амплитуды составляющих переносного движения нока могут изменяться с учетом зависимости от угла подъема стрелы ![]()
![]() в пределах
в пределах ![]()
![]() м;
м; ![]()
![]() м соответственно. Для определенности анализ вынужденных колебаний подвеса проводился при значении угла
м соответственно. Для определенности анализ вынужденных колебаний подвеса проводился при значении угла ![]()
![]() , амплитуд
, амплитуд![]()
![]() м;
м;![]()
![]() м.
м.
Аналогичные соотношения были получены для составляющих переносного движения нока, обусловленных килевой качкой судна. Расстояние между ЦТ судна и центром крепления крана к судовому фундаменту было принято равным 31м. Амплитуды составляющих переносного движения при килевой качке с учетом зависимости от угла подъема стрелы крана ![]()
![]() изменяются в пределах
изменяются в пределах ![]()
![]() м;
м;![]()
![]() м соответственно. Расчетные значения проекций амплитуды для угла подъема стрелы
м соответственно. Расчетные значения проекций амплитуды для угла подъема стрелы ![]()
![]() приняты
приняты ![]()
![]() м;
м; ![]()
![]() м.
м.
На рис.2а представлена схема, используемая при расчете параметров переносного движения нока крана, обусловленного бортовой качкой судна.
Принципиальное значение в плане анализа динамики подвеса имеет соотношение частот его собственных колебаний и возмущающих воздействий, вызванных качкой судна. Оценка собственной угловой частоты ![]()
![]() подвеса, представимого моделью математического маятника, с достаточной точностью может быть выполнена по формуле:
подвеса, представимого моделью математического маятника, с достаточной точностью может быть выполнена по формуле:
![]()
где: - ускорение свободного падения; L - длина подвеса, м.
Примечание: период - ![]()
![]() (с), частота - f (
(с), частота - f (![]()
![]() ) и угловая частота - k (
) и угловая частота - k (![]()
![]() ) колебаний связаны между собой следующим соотношением:
) колебаний связаны между собой следующим соотношением:
Были определены значения угловых частот возмущающих воздействий, оговоренных в ТЗ, и соответствующие им величины критических длин подвеса при условиях ![]()
![]() и
и ![]()
![]() .
.
Выполнение второго условия при вынужденных колебаниях нока крана в вертикальном направлении даже при относительно малых значениях амплитуды ![]()
![]() может привести к параметрическому резонансу системы.
может привести к параметрическому резонансу системы.
В принципе, все значения «критических» длин подвеса попадают в рабочий диапазон проведения грузовых операций с использованием крана. Таким образом, расчетная проверка эффективности работы крана на волнении была произведена для всех значений «критических» длин подвеса и соответствующих им частот возмущающих воздействий.
Проблема стабилизации пространственного положения подвеса с грузом в процессе эксплуатации судового крана при разовых, случайных или регулярных воздействиях факторов среды решается одним из следующих способов:
- Путем выработки управляющих воздействий на приводы крана в автоматическом или ручном режиме (последний режим в конструкциях отечественных судовых кранов реализуется чаще) в процессе эксплуатации с целью выхода из «критической» зоны рабочих параметров крана и выполнения контрманевров, ослабляющих или нивелирующих влияние факторов среды;
- На стадии конструирования путем создания автоматизированной системы с программным управлением, обеспечивающей мониторинг состояния оборудования, среды, параметров рабочих процессов и оптимальное управление механизмами крана с учетом специфики его применения и условий эксплуатации.
- Посредством входящих в состав оборудования крана специальных устройств и механизмов, работающих при включении или постоянно в автоматическом режиме и выполняющих функции компенсации, подавления или рассеивания энергии неблагоприятных воздействий факторов среды.
В практических приложениях применяется, как правило, комбинация перечисленных выше способов. Наиболее рациональным оказался третий способ, что продиктовано спецификой условий эксплуатации крана и отсутствием гарантированной возможности отстройки от резонансных частот вынужденных колебаний подвеса путем изменения пространственного положения нока и груза. Как решение поставленной задачи в техническом проекте крана КЭГ 20031 была предложена схема бифилярного V-образного подвеса, который благодаря своей геометрии должен ограничивать раскачивание груза в плоскости YOZ и вспомогательная лебедка - компенсатор (ЛК), призванная «гасить» колебания подвеса в плоскости XOY и ограничивать его раскачивание в плоскости YOZ (вариант 1, рис.2б). В соответствии с данным решением вспомогательная лебедка в процессе выполнения краном грузовых операций должна работать на выборку каната - оттяжки подвески, обеспечивая его натяжение.
Колебания подвески с грузом в диаметральной плоскости крана (XOY) называются продольными, а в плоскости YOZ - поперечными.
На рис. 3-4 представлены характерные графики поперечных и продольных колебаний бифилярного подвеса с грузом, построенные применительно к конкретным его физическим параметрам B = 1м, b = 0,25м, b = 0,5м, m = 20000 кг и различным условиям кинематического возбуждения нока крана.
Прежде чем перейти к анализу динамических свойств бифилярного подвеса необходимо отметить следующее. В силу того, что стрела крана в процессе эксплуатации не будет занимать строго определенное положение, совпадающее с диаметральной плоскостью судна или перпендикулярное к нему (рис. 2а), а векторы возмущающих воздействий могут иметь произвольную направленность, подвес с грузом будет перемещаться в общем случае в трех измерениях, описывая пространственную траекторию.

а - схема к расчету параметров движения нока; б - конструкция бифилярного подвеса; в - конструкция одинарного подвеса с двумя оттяжками
Рис. 2 Схемы расчета внешних нагрузок и конструкций подвеса крана
На рис. 2б и 2в пространственные траектории движения подвесов показаны пунктиром. При анализе динамики подвеса с грузом была использована упрощенная расчетная схема, согласно которой он может совершать независимые движения либо в диаметральной плоскости крана - XOY, либо в перпендикулярной к ней плоскости - YOZ.
Выводы из анализа графиков:
Характер свободных колебаний V-образного подвеса в плоскости YOZ при начальном его отклонении от положения равновесия на угол 5° и нулевой начальной скорости аналогичен движению обычного подвеса с параллельными грузовыми ветвями (рис. 2в).
Применение по варианту 1 вспомогательной ЛК, работающей на выборку каната - оттяжки с постоянным натяжением, не способствует стабилизации процесса вынужденных колебаний подвеса как в плоскости XOY (см. рис. 3), так и в плоскости YOZ. Увеличение постоянного усилия натяжения каната - оттяжки также не дает желаемого эффекта. Данное обстоятельство имеет следующее объяснение. В течение полупериода движения подвеса по направлению от корпуса крана к ноку (при продольных колебаниях) лебедка, сопротивляющаяся вытравливанию каната, обеспечивает в том или ином объеме «гашение» энергии переносного движения нока, вызванного качкой судна. В обратном направлении лебедка может наоборот ускорить движение подвеса, внося в систему энергию, равную рассеянной энергии за первый полупериод его вынужденных колебаний. Результатом является нулевой эффект рассеивания поступающей извне в систему энергии, что в свою очередь ведет к увеличению раскачивания груза.
Однако ввиду нерегулярности волнения вероятность данного процесса невелика. Работа силы сопротивления (рис. 2а) при поперечных колебаниях подвеса с грузом ввиду характерного соотношения плеч действующих сил оказывается также явно недостаточной для удовлетворительной стабилизации процесса (рис. 4). Конструктивное решение ЛК должно предусматривать функциональное разделение режимов принудительного вытравливания каната с большой силой сопротивления при торможении подвеса и выборки слабины каната с относительно малым усилием при его обратном ходе.
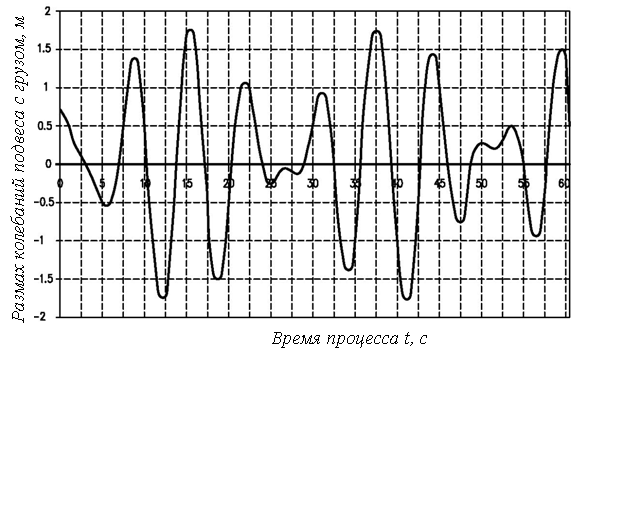
На рис. 5 представлен график развития и стабилизации процессов вынужденных колебаний подвеса с грузом в продольном направлении.
Геометрические и физические параметры конструкции при анализе динамики имели значения: угол подъема стрелы = 60, характерные размеры схемы подвеса С = 3м, B = 1,5м, амплитуды переносного движения точки подвеса (нока) в направлениях x, y равнялись 0 = 0,78 м; 0 = 0,27 м, масса груза m = 20000 кг, усилие торможения каждой из двух лебедок T = 75кН, начальный угол отклонения подвеса от вертикали составлял (0)=2.
Предлагаемая конструкция подвеса (вариант 2, рис. 2в) при соответствующем задании геометрических размеров и величины усилия торможения каждой из двух лебедок обеспечивает стабилизацию процесса вынужденных колебаний подвеса.

T = 10 кН, = 1 рад/с, L = 10 м, = 0, 0 = 0,31 м,
0 = 0,54 м, 0(0) = 6
Рис. 3 Вынужденные продольные колебания V-образного подвеса
T = 10 кН, = 1 рад/с, L = 10 м, = 0, 0 = 0,31 м,
0 = 0,54 м, 0(0) = 5
Рис. 4 Вынужденные поперечные колебания V-образного подвеса
T = 75кН, = 1 рад/с, L = 10 м, = 60
Рис.5 Вынужденные продольные колебания подвеса при циклически изменяющейся силе сопротивления лебедок
Разнесение выходных блоков канатов - оттяжек ЛК относительно корпуса стрелы крана на гашении вынужденных продольных колебаний подвеса не отражается, если движение подвеса происходит строго в плоскости XOY.
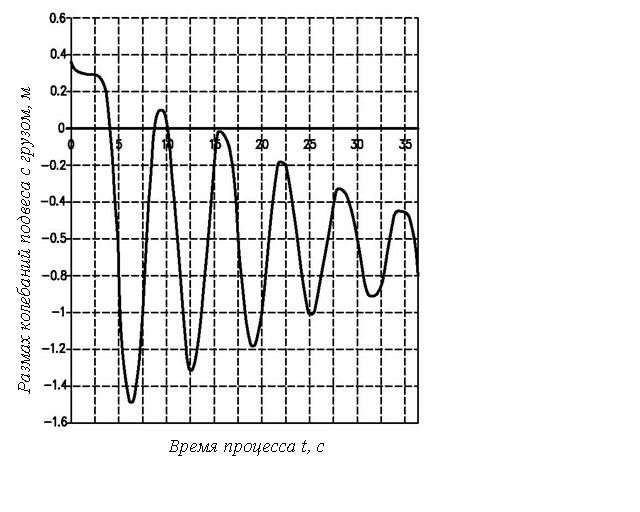
На рис. 7 представлен график развития и стабилизации процессов вынужденных колебаний подвеса с грузом в поперечном направлении. Геометрические и физические параметры конструкции при анализе динамики имели значения: угол подъема стрелы = 60, характерные размеры схемы подвеса С = 3м, B = 1,5м, амплитуды переносного движения точки подвеса (нока) в направлениях z, y равнялись 0 = 0,78 м; 0 = 0,27 м, масса груза m = 20000 кг, усилие торможения каждой из двух лебедок T = 75кН, начальный угол отклонения подвеса от вертикали составлял (0)=2.
В результате проведенного исследования динамики грузового подвеса крана КЭГ20031 при выполнении грузовых операций в условиях морского волнения силой до трех баллов можно сформулировать следующие выводы:
- В состав оборудования судового крана с целью стабилизации вертикального положения грузового подвеса при работе в условиях качки судна обязательно должны быть включены механизмы, предназначенные для компенсации, преобразования или рассеивания энергии колебания нока крана;
- Ввиду того, что применение более эффективного способа гашения колебаний груза по варианту одинарного подвеса с двумя оттяжками в конструкции крана КЭГ20031 подразумевает необходимость применить две лебедки - компенсатора (ЛК) грузоподъемностью 5кН каждая, что неконструктивно, то рекомендуется конструкция бифилярного подвеса.
Конструктивное решение ЛК должно предусматривать функциональное разделение режимов принудительного вытравливания каната с большой силой сопротивления при торможении подвеса и выборки слабины каната с относительно малым усилием при его обратном ходе.
Технические данные ЛК:
Усилие, с которым выбирается канат в режиме торможения подвеса с грузом кН;
Линейная скорость выборки слабины каната лебедкой - 0,5м/с;
Выходные блоки, через которые проходят канаты ЛК, рекомендуется разнести на расстояние 2м. Разнесение выходных блоков лебедок, назначение параметров В и С продиктованы необходимостью обеспечения требуемой эффективности функционирования ЛК при рассеивании энергии вынужденных колебаний подвеса как в продольном, так и в поперечном направлениях.
В четвертой главе приводятся результаты работы системы стабилизации груза в различных условиях и режимах функционирования.
Сравнение уровней напряжений при раскачивании груза массой 20,5 т в продольном направлении показало эффективность воздействия стабилизирующей лебедки на затухание колебаний. Затухание колебаний груза при включенной лебедке происходило в среднем за 15-20с. При выключенной стабилизирующей лебедке колебания могли продолжаться неопределенно долго.

T = 75кН, = 1 рад/с, L = 10 м, = 60
Рис.6 Вынужденные поперечные колебания подвеса при циклически изменяющейся силе сопротивления лебедок
При поперечных колебаниях груза влияние стабилизирующей лебедки незначительно. Затухание колебаний груза в этом случае обеспечивалось схемой запасовки грузовых канатов на участке нок стрелы - грузовая подвеска (бифилярный подвес).
Система стабилизации позволяет снизить длительность воздействия циклически изменяющихся во времени динамических воздействий на конструкции крана при его работе в условиях волнения и таким образом обойтись без значительного снижения грузоподъемности.
Также проводится оценка влияния разработанной системы пространственной стабилизации грузового подвеса на эксплуатационные характеристики крана и экономического эффекта применения предложенной системы.
Раскачивание груза на канатах снижает скорость проведения грузовых операций, а зачастую даже накладывает ограничения на возможность выполнения работ при определенной балльности моря, тем самым сокращая технические возможности судна по грузообработке. Это касается как машинного времени, связанного с вынужденным изменением длины грузового подвеса, если она принимает «критические» значения при соответствующих частотах возмущающих воздействий во всем рабочем диапазоне проведения грузовых операций с использованием крана, так и времени, затрачиваемого на ручные операции, связанного с необходимостью удержания груза при его опускании. Таким образом, применение системы пространственной стабилизации повышает эффективность работы крана и увеличивает его техническую производительность.
ЗАКЛЮЧЕНИЕ
В диссертации получены следующие результаты:
- Проанализированы способы осуществления грузовых операций в открытом море и проведены первоначальные исследования различных исполнений конструкции судового грузового устройства.
- Проведен анализ особенностей работы судового крана в открытом море. По результатам анализа особенностей эксплуатации разработано математическое описание работы судового крана в условиях качки и проведен анализ динамических явлений, возникающих при его работе. Уточненная математическая модель судового крана, представляет собой систему дифференциальных уравнений второго порядка, нелинейных, неоднородных, с переменными коэффициентами. Их решение в общем виде в квадратурах классическими способами невозможно. Решение такой системы дифференциальных уравнений предложено проводить методом численного интегрирования.
- При определении максимальных нагрузок судового крана в условиях, отличающихся от отраженных в Правилах по грузоподъемным устройствам морских судов Российского морского регистра судоходства, уточнен коэффициент динамичности в соответствии с условиями эксплуатации крана.
- Разработана принципиально новая система стабилизации груза без применения специальных демпфирующих устройств, позволяющих свести к минимуму влияние динамических воздействий на металлоконструкции и механизмы крана в процессе его работы. Конструктивное решение системы предусматривает функциональное разделение режимов принудительного вытравливания каната с большой силой сопротивления при торможении подвеса и выборки слабины каната с относительно малым усилием при его обратном ходе.
- Проведены натурные исследования поведения крана в различных условиях его эксплуатации с учетом работы системы стабилизации груза. В результате исследования получены графики распределения напряжений в элементах конструкции с учетом работы системы стабилизации груза в различных условиях и режимах функционирования.
- Рассмотренная конструктивно-технологическая схема судового крана с применением систем пространственной стабилизации грузового подвеса как специального устройства для судов и кораблей, выполняющих грузовые операции в открытом море, расширяет область применения судовых кранов. Результаты исследований, проведённых в ходе работы над диссертацией, имеют практическое значение для проектирования судовых кранов различного назначения.
- Полученный экономический эффект применения судовых кранов новой конструкции на основе экспертной оценки может составить до 800 тыс. р.
- Разработана методика определения геометрии и параметров судового крана, позволяющая проектировать наиболее рациональные конструкции, обеспечивающие повышение производительности труда при выполнении погрузочных работ за счет сокращения рабочего времени, затрачиваемого на ручные операции.
По теме диссертации опубликованы следующие работы:
а) в рецензируемых научных журналах и изданиях:
- Георгиев А.А., Суслов Д.В. Оптимизация геометрических параметров элементов исполнительных механизмов судовых гидравлических машин / А.А. Георгиев, Д.В. Суслов // Морской вестник. – 2007. – С.87-94. №1 (4). (автор 45%)
- Георгиев А.А., Суслов В.Ф. К вопросу оптимизации несущих металлоконструкций судовых механизмов с использованием современных аппаратных средств / А.А. Георгиев, В.Ф. Суслов // Морской вестник. – 2007. – №1 (21). – С.69-72. (автор 45%)
- Георгиев А.А., Суслов В.Ф. К вопросу выбора программного обеспечения для решения задач оптимизации судового машиностроительного оборудования / А.А. Георгиев, В.Ф. Суслов // Морской вестник. – 2007. – №3 (23). – С.49-52. (автор 45%)
- Георгиев А.А., Суслов В.Ф. Теоретические подходы к оптимальному проектированию несущих металлоконструкций судовых грузоподъемных устройств / А.А. Георгиев, В.Ф. Суслов // Морской вестник. – 2007. – №4 (24). – С.21-23. (автор 60%)
- Георгиев А.А., Суслов В.Ф. К вопросу выбора стратегии оптимизации судового машиностроительного оборудования в современных рыночных условиях / А.А. Георгиев, В.Ф. Суслов // Морской вестник. – 2008. – №1 (25). – С.46-48. (автор 45%)
- Георгиев А.А., Арутюнян А.А., Суслов Д.В., Завирухо В.Д. Обоснование конструктивного решения системы стабилизации груза крана КЭГ20031С / А.А. Георгиев, А.А. Арутюнян, Д.В. Суслов, В.Д. Завирухо // Морской вестник. – 2010. – №1 (33). – С.33-36. (автор 90%)
- Георгиев А.А., Арутюнян А.А., Суслов Д.В., Завирухо В.Д. К вопросу повышения технологичности судового комплектующего оборудования / А.А. Георгиев, А.А. Арутюнян, Д.В. Суслов, В.Д. Завирухо // Морской вестник. – 2010. – №3 (35). – С.28-30. (автор 30%)
- Георгиев А.А., Арутюнян А.А., Суслов Д.В., Завирухо В.Д. К вопросу методологического обеспечения оптимизационного проектирования судовых кранов / А.А. Георгиев, А.А. Арутюнян, Д.В. Суслов, В.Д. Завирухо // Морской вестник. – 2010. – №4 (36). – С.39-43. (автор 60%)
- Георгиев А.А. Практические задачи оптимизационного проектирования судовых кранов / А.А. Георгиев // Морской вестник. – 2010. – №1 (37). – С.47-51. (автор 100%)
- Георгиев А.А., Арутюнян А.А., Суслов Д.В., Завирухо В.Д. Структурно-параметрический синтез пространственных несущих конструкций изделий судового машиностроения с применением генетических алгоритмов и имитационных моделей / А.А. Георгиев, А.А. Арутюнян, Д.В. Суслов, В.Д. Завирухо // Морской вестник. – 2011. – №3(39). – С.38-41. (автор 80%)
- Георгиев А.А., Арутюнян А.А., Суслов Д.В., Завирухо В.Д. К вопросу оптимизации проектных решений при проектировании несущих металлоконструкций судовых механизмов с применением генетических алгоритмов / А.А. Георгиев, А.А. Арутюнян, Д.В. Суслов, В.Д. Завирухо // Морской вестник. – 2011. – №2 (38). – С.43-45. (автор 50%)
- Георгиев А.А., Арутюнян А.А., Суслов Д.В., Завирухо В.Д. Расчетная математическая модель механизма изменения вылета стреловых кранов с активными уравновешивающими устройствами в виде механизмов с жесткими звеньями / А.А. Георгиев, А.А. Арутюнян, Д.В. Суслов, В.Д. Завирухо // Морской вестник. – 2011. – №4 (40). – С.27-30. (автор 50%)
б) прочие публикации:
- Георгиев А.А., Здрогов В.Б. Проблемы создания судовых кранов большой грузоподъемности / А.А. Георгиев, В.Б. Здрогов // Судостроительная промышленность: науч.-техн. сб. Серия: «Технология и организация производства. Судовое машиностроение. Опыт проектирования и создания судовых механизмов». – 2007. – С.21-35. (автор 50%)
- Георгиев, А.А., Иванова, М.А. Перспективы развития судовых кранов / А.А. Георгиев, М.А. Иванова // Судостроительная промышленность: науч.-техн. сб. Серия: «Технология и организация производства. Судовое машиностроение. Опыт проектирования и создания судовых механизмов». – 2008. – С.9-13 (автор 50%)
- Георгиев А.А., Васильев И.Н. К вопросу снижения массогабаритных характеристик подъемно-транспортного оборудования на примере оптимизации параметров прямых стрел судовых грузоподъемных кранов / А.А. Георгиев, И.Н. Васильев // Судостроительная промышленность: науч.-техн. сб. Серия: «Технология и организация производства. Судовое машиностроение. Опыт проектирования и создания судовых механизмов». – 2009. – С.44-50 (автор 60%)
- Георгиев А.А., Поляков В.Г., Авдейчик В.В. Опыт создания уникальных кранов в ОАО «Пролетарский завод» и ЗАО «ЦНИИ СМ». Перспективы развития подъемной техники / А.А. Георгиев, В.Г. Поляков, В.В. Авдейчик // Судостроительная промышленность: науч.-техн. сб. Серия: «Технология и организация производства. Судовое машиностроение. Опыт проектирования и создания судовых механизмов». – 2011. – С.75-80 (автор 90%)
- Георгиев А.А., Пиль Э.А. Выбор конструкции системы стабилизации груза для судового крана / А.А. Георгиев, Э.А. Пиль // Альманах современной науки и образования. – 2012. – №11(66). – С.39-42 (автор 70%)
Результаты работы докладывались на II Российской научно-практической конференции судостроителей 2010г. и Молодежной научно-практической конференции «Взгляд в будущее-2011».
ИЦ СПбГМТУ, Лоцманская, 10
Подписано в печать. Зак.. Тир.80. 1,1 печ. л.