

Оптимизационный кинематический синтез плоских рычажных механизмов iv класса с приближенным выстоем выходного звена
На правах рукописи
ГЕБЕЛЬ ЕЛЕНА СЕРГЕЕВНА
ОПТИМИЗАЦИОННЫЙ КИНЕМАТИЧЕСКИЙ СИНТЕЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ IV КЛАССА С ПРИБЛИЖЕННЫМ
ВЫСТОЕМ ВЫХОДНОГО ЗВЕНА
Специальность: 05.02.18 – Теория механизмов и машин
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
кандидата технических наук
Новосибирск – 2009
Работа выполнена на кафедре «Автоматизация и робототехника»
государственного образовательного учреждения
высшего профессионального образования
«Омский государственный технический университет», г. Омск.
Научный руководитель: доктор технических наук, профессор
ХОМЧЕНКО Василий Герасимович
Официальные оппоненты: доктор технических наук, профессор
ДВОРНИКОВ Леонид Трофимович
кандидат технических наук, доцент
ЕВДОКИМОВ Юрий Иванович
Ведущая организация: ФГУП «Омское моторостроительное
объединение имени П.И. Баранова»,
г. Омск
Защита состоится: « 11 » ноября 2009 г. в 14:00 часов на заседании диссертационного совета Д 212.173.07 при ГОУ ВПО «Новосибирский государственный технический университет» по адресу: 630092, Новосибирск-92, пр. Карла Маркса, 20.
С диссертацией можно ознакомиться в ГОУ ВПО «Новосибирский государственный технический университет».
Автореферат разослан «___» октября 2009г.
Ученый секретарь диссертационного совета
кандидат технических наук, доцент Никитин Ю.В.
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Экономическое развитие государства связано с совершенствованием машиностроительной отрасли производства. Создание новых машин и механизмов возможно на основе серьезного научного фундамента, позволяющего обеспечивать высокую эффективность машин уже на стадии их проектирования. Процесс проектирования в обязательном порядке должен включать в себя этапы структурного и параметрического синтеза схем машин, кинематического анализа и силового расчета с использованием наиболее зарекомендовавших себя методов. Развитию машиностроения сопутствует усложнение схемных решений исполнительных устройств и, как следствие, возникает необходимость разработки особых подходов к исследованию создаваемых машин и механизмов.
Актуальность темы. В ряде отраслей промышленности широко используются цикловые технологические машины-автоматы и манипуляторы, рабочие органы которых совершают возвратно-вращательные или возвратно-поступательные движения с мгновенными остановками или с остановкой конечной продолжительности в одном, либо в двух крайних положениях. К основным характеристикам такого рода машин, кроме прочего, относится точность позиционирования рабочих органов на интервале выстоя.
Закон движения рабочих органов с выстоем выходного звена может быть обеспечен с помощью различных технических средств, в частности, кулачковых, кулачково-рычажных и рычажных механизмов. В практике проектирования в качестве механизмов с выстоем часто используются кулачковые механизмы, которые универсальны по своим кинематическим возможностям и просты по расчету. Однако они обладают рядом существенных недостатков, из которых главными являются малая износоустойчивость кулачков, особенно в механизмах с большими нагрузками, и склонность к размыканию в машинах с большим числом оборотов ведущего вала. В результате кулачковые механизмы в ряде случаев ограничивают повышение производительности и мощности отдельных машин. Эти пределы удается преодолеть, применяя рычажные механизмы с приближенными выстоями. Машины-автоматы, спроектированные на базе рычажных механизмов, обладают определенными преимуществами (надежность, долговечность, высокая нагрузочная способность, возможность применения в быстроходных машинах-автоматах), но их распространение было в некоторой степени ограничено, в связи с отсутствием достаточно простых и эффективных методов синтеза многозвенных рычажных механизмов высоких классов с приближенным выстоем по заранее заданной циклограмме движения рабочего органа.
Исследуемая в данной работе модель рычажного механизма IV класса 3-го порядка с приближенным выстоем конечной продолжительности в крайнем положении позволяет получать существенно меньшую кинематическую погрешность позиционирования выходного звена на интервале выстоя выходного звена по сравнению с известными исполнительными механизмами. В связи с этим становиться актуальной задача разработки методики оптимизационного кинематического синтеза рычажных механизмов IV класса 3-го порядка с выстоем выходного звена с учетом их возможных модификаций, позволяющей получать схемы с заданными качественными характеристиками (углами давления) и с остановкой рабочего органа высокой точности.
Диссертационная работа выполнена при поддержке гранта Федерального агентства по образованию (Рособразования) № 2.1.1/2763 «Развитие научного потенциала высшей школы (2009-2010)».
Цель работы. Повышение точности позиционирования рабочих органов цикловых машин-автоматов на основе использования плоских рычажных механизмов IV класса 3-го порядка с приближенным выстоем выходного звена.
Для достижения поставленной цели необходимо решить следующие задачи:
- выявить модификации рычажного механизма IV класса 3-го порядка с приближенным выстоем выходного звена и выполнить их идентификацию;
- разработать методики и модели кинематического синтеза и анализа плоских кривошипно-коромысловых и кривошипно-ползунных рычажных механизмов IV класса 3-го порядка с выстоем с учетом их возможных модификаций;
- разработать методику оценки работоспособности плоского рычажного механизма IV класса 3-го порядка с выстоем выходного звена по условиям качества передачи движения;
- сформировать главный и дополнительные критерии оптимизации, на основе которых создать методику и алгоритм оптимизационного синтеза рычажных механизмов IV класса 3-го порядка с приближенным выстоем по критерию точности позиционирования выходного звена с учетом качественных характеристик механизма;
- провести численные эксперименты с целью проверки адекватности предложенных методик проектирования схем механизмов IV класса 3-го порядка с выстоем, а также исследования влияния свободных параметров синтеза на точность позиционирования выходного звена и качество передачи движения;
- создать физическую модель объекта для подтверждения возможности получения работоспособных схем рычажных механизмов IV класса 3-го порядка с приближенным выстоем, пригодных для широкого инженерного применения в технике.
Методы исследований. В работе использованы методы: теории механизмов и машин, теоретической механики, аналитической геометрии, синтеза и анализа рычажных механизмов высоких классов, кинетостатического анализа, теории приближения функций и нелинейного математического программирования, теории алгоритмов и объектно-ориентированного проектирования и программирования.
Научная новизна работы состоит в следующем:
- На основе предложенных признаков разграничения модификаций разработаны универсальные математические модели кинематического синтеза и анализа кривошипно-коромысловых и кривошипно-ползунных механизмов IV класса 3-го порядка с выстоем по заданной циклограмме, позволившие в отличие от известных моделей объединить аналитическое описание выявленного многообразия такого рода механизмов;
- Предложены методики решения задачи кинетостатического анализа и определения направления векторов скоростей шарниров в рычажных механизмах IV класса 3-го порядка с выстоем, сделавшие возможным оценки работоспособности схемы и качества передачи сил и движения в механизме на этапе кинематического синтеза;
- Созданы методика и алгоритм оптимизационного кинематического синтеза рычажных механизмов IV класса 3-го порядка с выстоем по заданной циклограмме по критерию точности позиционирования выходного звена на интервале выстоя с учетом дополнительных условий синтеза, обеспечившие разработку эффективного программного продукта для проектирования исследуемых в работе механизмов.
На защиту выносятся следующие положения:
- Универсальные математические модели кинематического синтеза и анализа кривошипно-коромысловых и кривошипно-ползунных механизмов IV класса 3-го порядка с выстоем выходного звена по заданной циклограмме с учетом выявленных их модификаций;
- Методика и алгоритм оптимизационного кинематического синтеза рычажных механизмов IV класса 3-го порядка с выстоем по критерию точности позиционирования рабочего органа с учетом дополнительных условий синтеза, характеризующих работоспособность схемы и качество передачи сил и движения;
- Синтезированные кинематические схемы рычажных механизмов IV класса 3-го порядка с выстоем, имеющие существенно меньшее значение кинематической погрешности позиционирования выходного звена на интервале приближенного выстоя.
Практическая значимость диссертационной работы заключается в том, что разработанные в ходе проведения исследований теоретические положения доведены до конкретных практических рекомендаций и автоматизированных процедур проектирования, реализованных в программном пакете и направленных на поиск оптимальных значений свободных параметров кинематического синтеза механизма IV класса с выстоем по заданной циклограмме.
Получен ряд кинематических схем рычажных механизмов IV класса 3-го порядка с выстоем, которые удовлетворяют существующим требованиям к качеству передачи сил и движения и имеют погрешность позиционирования рабочего органа на интервале конечной остановки существенно меньшую по сравнению с используемыми в настоящий момент механизмами.
Результаты работы использованы в качестве методических материалов в конструкторской практике организаций машиностроительной и полиграфической отраслей промышленности и в учебном процессе кафедры «Автоматизация и робототехника».
Достоверность результатов, выводов и рекомендаций обусловлена обоснованностью исходных данных и принятых ограничений; корректной постановкой научной задачи исследования и выбором апробированных методов ее решения. При решении научной задачи были использованы методологические принципы, разработанные в трудах ведущих ученых в области теории механизмов и машин, плоских рычажных механизмов высоких классов и задач оптимизации. Полученные в диссертационной работе результаты не противоречат положениям вышеперечисленных теорий.
Разработанные математические модели оптимизационного синтеза плоских рычажных механизмов IV класса 3-го порядка были проверены путем проведения численных и натурных экспериментов по исследованию точностных свойств такого типа механизмов, которые показали соответствие расчетных данных и наблюдаемых результатов.
Экспериментальные исследования проводились на разработанном макете рычажного механизма IV класса с приближенным выстоем, измерение перемещения рабочего органа оценивалось на датчике перемещения часового типа.
Апробация работы. Основные результаты исследования докладывались на:
- III Международной конференции «Проблемы механики современных машин», июнь 2006г., ВСГТУ, г. Улан-Удэ;
- XII Мировом конгрессе по Теории механизмов и машин (IFTOMM). 2007г., г. Безансон, Франция;
- VI Международной научно - технической конференции «Динамика систем, механизмов и машин» 10-12 ноября 2007 г., ОмГТУ, г. Омск;
- научно-технической конференции студентов и аспирантов каф. АРТ, 25 – 26 апреля 2008г., ОмГТУ, г. Омск;
- IV Международной конференции «Проблемы механики современных машин», 23-29 июня 2009г., ВСГТУ, г. Улан-Удэ.
Личный вклад автора.
Основные результаты диссертационной работы, полученные автором лично:
- выявлены признаки разграничения модификаций рычажных механизмов IV класса 3-го порядка с выстоем;
- разработаны аналитические методики кинематического синтеза и анализа кривошипно-коромысловых и кривошипно-ползунных механизмов IV класса 3-го порядка с приближенным выстоем выходного звена по заданной циклограмме с учетом их модификаций;
- разработана методика оценки качества передачи сил и движения, обеспечивающая получение работоспособного механизма на этапе кинематического синтеза;
- создан алгоритм оптимизационного кинематического синтеза рассматриваемых механизмов по критерию точности позиционирования выходного звена с учетом дополнительных условий синтеза, на основании которого разработан эффективный программный продукт, предназначенный для проектирования схем данных механизмов;
- проведены численные эксперименты, результаты которых обработаны и проанализированы, сформулированы выводы;
- спроектированы кинематические схемы кривошипно-коромысловых и кривошипно-ползунных механизмов IV класса с приближенным выстоем выходного звена на основании предложенных и разработанных методик.
Внедрение результатов исследований. Результаты диссертационного исследования внедрены в виде методик расчета кривошипно-коромысловых и кривошипно-ползунных плоских рычажных механизмов IV класса с выстоем по заданной циклограмме:
- в конструкторскую практику на ОАО «Омском заводе подъемных машин» (г. Омск);
- в конструкторскую практику на ЗАО НИИ «Полиграфмаш» (г. Москва);
- в учебный процесс на кафедре «Автоматизация и робототехника» ГОУ ВПО «Омский государственный технический университет».
Публикации. Основное содержание диссертации отражено в 13 научных работах автора, из которых 2 работы, опубликовано в журналах, входящих в перечень изданий, рекомендованных ВАК РФ, 3 – в ведущих научных журналах, 6 – в сборниках трудов Международных и Всероссийских научно-технических конференций, 1 – в материалах XII Всемирного конгресса по ТММ (IFTOMM), 1 – депонирована в ВИНИТИ.
Структура и объем работы. Диссертация состоит из введения, пяти глав, заключения, изложенных на 203 страницах основного текста, в том числе 65 рисунков и 11 таблиц, библиографический список (132 наименования), и приложений.
ОСНОВНОЕ СОДЕРЖАНИЕ РАБОТЫ
Во введении описана область использования шарнирных рычажных механизмов высоких классов, проблемная ситуация, связанная с необходимостью обеспечивать высокую точность позиционирования рабочего органа за счет использования плоских рычажных механизмов IV класса 3-го порядка с выстоем выходного звена. Исходя из этого, обоснована актуальность темы диссертации, сформулированы научная новизна и практическая ценность работы, приведены сведения об основных публикациях, апробации и реализации полученных результатов, а также сформулированы основные положения, выносимые на защиту.
В первой главе диссертации представлен обзор технической литературы по вопросам возможности получения остановки конечной продолжительности в многозвенных рычажных механизмах, а также методам решения задач кинематического синтеза и анализа таких механизмов, их автоматизированного проектирования, поставлены цель и задачи исследования.
Среди научных трудов, посвященных изучению плоских многозвенных шарнирных механизмов, следует выделить работы В. М. Абрамова, И. И. Артоболевского, И. И. Вульфсона, У. А. Джолдасбекова, Л. Т. Дворникова, К. С. Иванова, В. Име, Н. И. Левицкого Э. Е. Пейсаха, К. Хайна, В. Г. Хомченко, С. А. Черкудинова, а также Р. В. Амбарцумянца, В. А. Бакшеева, Ю. И. Евдокимова, А. Б. Кикина, А. С.Супрунова, В. С. Хорунжина, А. Г. Эрдмана и других ученых.
Ранее разработан метод кинематического синтеза рычажных механизмов IV класса 3-го порядка по заданной циклограмме с приближенным выстоем конечной продолжительности в крайнем положении, получаемым за счет использования предельных положений звеньев. Однако методы синтеза восьмизвенных рычажных механизмов IV класса с выстоем в настоящее время ограничены рассмотрением небольшого числа схем, которые не могут в полной мере обеспечить их рациональную компоновку в машине-автомате.
Объектом исследования в диссертационной работе является плоский рычажный механизм IV класса 3-го порядка, который позволяет получить остановку заданной продолжительности с высокой кинематической точностью позиционирования выходного звена, синтезированный профессором В. Г. Хомченко.
На основе проведенного обзора литературных источников отмечено недостаточное развитие исследований по реализации кинематических возможностей рычажных механизмов IV класса и отсутствие методов оптимизационного синтеза, позволяющих проектировать данные механизмы по заданной циклограмме с требуемыми точностью позиционирования выходного звена на интервале выстоя и качеством передачи сил и движения.
На основании выводов, сделанных по результатам анализа литературного обзора, сформулированы цель и задачи диссертационной работы.
Во второй главе диссертации исследованы возможные модификации механизма IV класса 3-го порядка, возникающие за счет различного использования предельных положений звеньев, а также некоторых других особенностей. Для выявления и идентификации модификаций механизма введены соответствующие признаки. Разработаны математические модели для решения задач кинематического синтеза и анализа кривошипно-коромысловых и кривошипно-ползунных механизмов IV класса 3-го порядка с приближенным выстоем выходного звена по заданной циклограмме с учетом параметров модификаций, которые используются на этапе оптимизационного синтеза.
Механизмы IV класса благодаря своим кинематическим особенностям имеют большие потенциальные возможности в обеспечении повышенной точности выстоя выходного звена по сравнению, например с восьмизвенными механизмами II класса, имеющими такое же число звеньев.
Эффективность синтеза рычажных механизмов с выстоем выходного звена по заданной циклограмме в значительной степени определяется параметрами сборок, обеспечивающими широкий диапазон возможных модификаций механизма, точностных, конструктивных и технологических характеристик разрабатываемых устройств. Таким образом, одним из важных условий синтеза является обеспечение рациональных конструктивных решений исполнительных механизмов, исходя из возможных модификаций.
Рассматриваются два вида плоских рычажных механизмов IV класса 3-го порядка с выстоем по заданной циклограмме (рис. 1), синтезированных профессором В. Г. Хомченко. Различие между которыми заключается в том, что в первом (рис. 1, а) шатун ВЕ присоединяется к звену FGЕ, шарнирно соединенному с коромыслом LHG четырехзвенного механизма HLCD, а во втором (рис. 1, б) – к звену FKЕ, которое с помощью шарнира К соединено с шатуном KCL названного четырехзвенника.
| а) | б) |
| Рис. 1. Рычажный механизм IV класса с выстоем выходного звена в крайнем положении: а) первый вид; б) второй вид | |
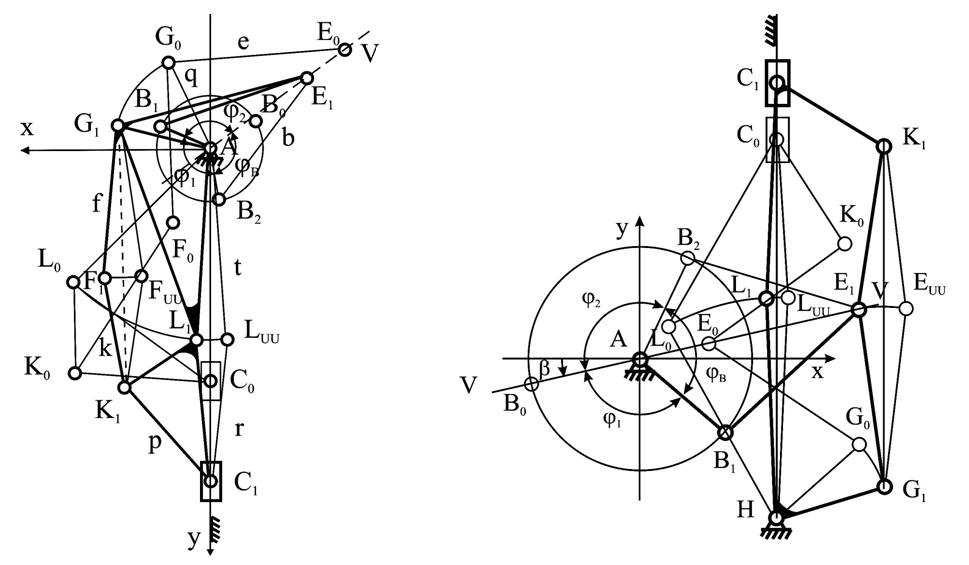
Исследуемые механизмы проектируются при условии обеспечения на интервале выстоя наилучшего равномерного (Чебышёвского) приближения функции положения выходного звена механизма к заданной функции положения рабочего органа. Это достигается за счет использования таких положений пар звеньев 1 и 2, 3 и 4, 5 и 6 (рис.1), в которых в начале и конце выстоя и при мгновенных остановках, возникающих в период приближенного выстоя конечной продолжительности, шарниры В, F и L находятся на одинаковом расстоянии от биссектрис АЕ1, G1K1 и НС1 углов, образуемых в указанные моменты конечного выстоя отрезками АВ, GF и HL, расположенными на соответствующих звеньях (рис.2).
Модификации механизма возникают за счет различного использования предельных положений звеньев, а также некоторых других особенностей рассматриваемого механизма (рис. 2). Для выявления и идентификации модификаций механизма введены соответствующие признаки.
Рис. 2. Кинематическая схема механизма IV класса с приближенным выстоем
В качестве первого признака разграничения модификаций рассматриваемого механизма используется положение шарниров А и Е относительно хорды В1В2, (рис.3, а). Вторым признаком является взаимное положение шарниров К и G относительно хорды F1FUU, соединяющей центры шарнира F в положениях, равноудаленных от биссектрисы КG (рис. 3, б). В качестве третьего признака разграничения модификаций примем взаимные положения шарниров С и H относительно хорды L1LUU (рис.3, в). Четвертым признаком разграничения модификаций механизма является расположение шарнира D относительно хорды C0С1 (рис. 3, г), стягивающей центры шарнира С в положениях, соответствующих началу и концу интервалов движения выходного звена CD.
а) б) в) г)
Рис.3. Уровни модификаций механизма IV класса с выстоем:
а) первый; б) второй; в) третий; г) четвертый.
Выявление возможных разновидностей механизма IV класса 3-го порядка с выстоем и введение вполне определенных правил их идентификации позволило получить классификацию схем и предложить метод создания множества структурных схем механизмов IV класса с выстоем. Выбор конкретной модификации для воспроизведения заданной циклограммы осуществляется по дополнительным конструктивным условиям, накладываемым на взаимное расположение звеньев механизма в компоновке машины.
Одним из основных требований при разработке единой универсальной математической модели исследуемого механизма является создание методики синтеза, включающей в себя описание выявленных модификаций, возможных для данного механизма, и позволяющей их автоматическую идентификацию. Это практически не усложняет математическую модель механизма, но значительно облегчает работу конструктора на этапе инженерного проектирования исполнительного устройства.
Предлагаемая методика кинематического синтеза позволяет синтезировать и исследовать модификации кривошипно-коромысловых и кривошипно-ползунных механизмов IV класса с выстоем, исходя из заданных параметров циклограммы, что конкретизирует поиск решений и упрощает построения базисных схем модификаций.
Аналитические выражения для рассчитываемых кинематических параметров имеют вид:
![]() ,
,
где Y – вектор рассчитываемых параметров; Z – вектор задаваемых параметров циклограммы; X – вектор свободных кинематических параметров механизма IV класса 3-го порядка;
![]() ,
,
t, r - относительные длины сторон HL, LC; Н и С - углы при вершинах Н и С треугольных звеньев GHL, LCK соответственно; с - относительная длина выходного коромысла СD (рис.2);
![]() ;
;
1 и В – углы поворота кривошипа за первый интервал движения и интервал приближенного выстоя; R– угол размаха рабочего органа машины;
![]() ;
;
b, e, f, k, q и p – соответственно относительные длины звеньев ВЕ, EG, GF, FK, GH и KC (звеном единичной длины является кривошип AB); G – угол между сторонами EG и GF звена ЕGF;, G, K – углы, задающие соответственно положения звена EG относительно звена ВE, стороны GH треугольного звена GHL относительно звена EGF, стороны KC треугольного звена KCL относительно биссектрисы GK в начале и конце интервала выстоя (рис. 2), коэффициент k1 меняется в пределах 0<k1<1 ; i, j, m, n – параметры модификации (рис. 3).
Вводится правая система координат XAY, начало которой совпадает с центром неподвижного шарнира А, а ось абсцисс – с положениями кривошипа АВ0 и шатуна В0Е0 в момент мгновенной остановки выходного звена механизма (рис. 2). Такое расположение системы координат позволяет упростить выражения для проекций шарниров на оси системы координат.
Первоначально рассчитываются координаты шарниров Е, G, F, H в момент начала и конца интервала выстоя с учетом задаваемых и свободных параметров синтеза и идентификаторов модификаций. Далее используется тот факт, что точка G1 коромысла GHL в начале и конце интервала выстоя находиться в одном и том же положении G1HL1, поскольку синтез исследуемого механизма ведется из условия равномерного приближения. Это обстоятельство позволяет принять условно точку G1 за неподвижную и, рассматривая на интервале выстоя кинематическую цепь АВЕG как шарнирный четырехзвенник с неподвижными шарнирами в точках А и G, определить угол G между предельными положениями звена GEF и координаты точек К1 и С1 шарниров К и С. Диада HLC за интервал выстоя также проходит через предельное положение, угол поворота коромысла GHL назначается с учетом того, что сумма длин дуг G1GUU и К1КUU, стягивающих углы G1НGUU и К1С1КUU соответственно, не должна превосходить по длине разности наибольшего и наименьшего расстояний между шарнирами G и К. Расчет координат точки КUU позволяет определить угол С поворота треугольного звена LCK за интервал выстоя и в конечном итоге найти положение L1, а также относительные длины t и r сторон HL, LC, и углы Н и С звеньев GHL и LCK соответственно. Вычислив координаты всех шарниров в момент мгновенного выстоя и используя заданный угол поворота выходного звена R и параметр n, который задает положение неподвижного шарнира D относительно хорды C1C0, получим зависимости для нахождения длины с коромысла CD и координат точки D.
Наличие входного кривошипа единичной длины, позволяет кратно увеличивать или уменьшать относительные кинематические параметры механизма. При этом циклограмма, угловые параметры схемы механизма, а также точность выстоя выходного звена в коромысловых механизмах остаются неизменными.
Для расчета абсолютных кинематических размеров должна быть известна длина одного из линейных параметров механизма. Исходя из функционального назначения механизма и дополнительных конструктивных требований на этапе эскизного проектирования, для кривошипно-коромысловых в качестве такого параметра используется абсолютное межцентровое расстояние ![]() между неподвижными шарнирами А и D, для ползунных механизмов - абсолютное перемещение
между неподвижными шарнирами А и D, для ползунных механизмов - абсолютное перемещение ![]() выходного ползуна за интервалы движения.
выходного ползуна за интервалы движения.
Кинематический анализ синтезированных кривошипно-коромысловых и кривошипно-ползунных механизмов IV класса 3-го порядка с выстоем выходного звена по заданной циклограмме выполнен по методике, являющейся комбинацией методов “инверсии” и «проекции». В качестве условного входного звена принято коромысло GHL замыкающего четырехзвенника, так как в силу особенностей структурного синтеза исследуемых механизмов они в этом случае оказываются более низких классов.
Порядок вычисления функции перемещения механизма IV класса 3-го порядка с выстоем выходного звена за счет использования предельных положений звеньев имеет свои специфику. Она вызвана тем, что при непрерывном однонаправленном изменении действительной обобщенной координаты условная обобщенная координата Н (Н - угол поворота коромысла GHL) будет меняться более сложным образом, поскольку условное начальное звено GHL совершает за цикл основное колебательное движение и небольшие дополнительные. Поэтому прежде чем вычислять функцию перемещения механизма необходимо выяснить характер изменения его условной обобщенной координаты за цикл. В исследуемом механизме IV класса 3-го порядка (рис. 2) условная обобщенная координата увеличивается от нуля до (Н+Н), затем уменьшается до значения (Н+Н/2), вновь возрастает до (Н+Н) и, наконец, уменьшается от (Н+Н) до нуля. На отрезке, соответствующем углу Н поворота условного входного звена за интервал выстоя, необходимо выбирать возможно меньший шаг изменения условной обобщенной координаты, так как на этом участке малому изменению условной обобщенной координаты соответствуют большие приращения действительной. В некоторых случаях, учитывая малые значения углов поворота выходного звена механизма за интервал выстоя, можно на участках выстоя функцию перемещения не рассчитывать, ограничившись сведениями о расположении ее некоторых легко определяемых экстремумов. Функция положения механизма при таком подходе оказывается представленной в параметрическом виде:
![]() ,
, ![]() .
.
В исследуемом механизме эта функция неоднозначна, поэтому в работе предложен алгоритм автоматизированной сортировки массива значений исходных функций ![]() ,
, ![]() .
.
Для исследования характера изменения скоростей и ускорений отдельных точек звеньев и угловых скоростей и ускорений звеньев кривошипно-коромысловых и кривошипно-ползунных механизмов IV класса с выстоем выходного звена совместно с вышеописанным методом смены входного звена предложено использовать численный метод, основанный на способе размыкания кинематической цепи и функциях «невязок», предложенных О. Г. Озолом. Метод, предложенный в диссертационной работе, основан на использовании геометрических связей между шарнирами треугольных звеньев и функций невязок. При таком подходе количество уравнений сокращается, и они имеют форму удобную для численного дифференцирования с целью исследования характера изменения скоростей и ускорений отдельных точек звеньев механизма IV класса с выстоем выходного звена.
Полученные математические модели ориентированы на создание автоматизированной процедуры оптимизационного синтеза механизмов IV класса с конечным выстоем выходного звена в одном из крайних положений.
В третьей главе сформированы функциональные ограничения, используемые при оптимизационном синтезе механизма IV класса 3-го порядка, выявлены и рассчитаны критерии оценки работоспособности спроектированной схемы механизма с возвратно-вращательным движением выходного звена.
Для расчета критериев качества передачи сил и движения, а именно углов давления и критериев, предложенных Э. Е. Пейсахом, решена задача анализа действия силовых факторов во внешних (опорных) и внутренних шарнирах механизма IV класса с выстоем по заданной циклограмме. Статический анализ сил, действующих на звенья механизма, выполнен с допущением, что связи, накладываемые на движение всеми кинематическими парами, являются идеальными, т.е. сумма работ всех реакций на любом возможном перемещении равна нулю. Описанное допущение эквивалентно предположению об отсутствии сил трения на поверхностях соприкосновения конструктивных элементов.
Кинетостатический анализ механизма IV класса с выстоем проводился в два этапа. Первоначально выделена структурная группа BEHCD (ферма), составлена система уравнений равновесия сил и моментов (1) и найдены методом Гаусса составляющие сил реакций в неподвижных шарнирах.
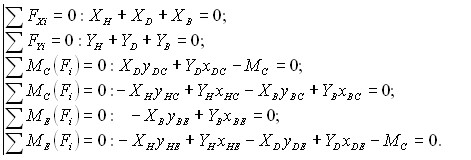 (1)
(1)
На втором этапе с учетом полученных из системы (1) значений реакций выполнен силовой расчет подвижных (внутренних) шарниров механизма IV класса с выстоем (2). Таким образом, найдено аналитическое выражение обобщенного движущего момента.
Дополнительно для оценки работоспособности синтезированной схемы механизма использовались углы давления, т.е. острый угол между направлениями вектора скорости и силы реакции.
Задача определения направления вектора скорости движения шарниров механизма IV класса решена с использованием методики У. А. Джолдасбекова, которая позволяет найти мгновенные центры скоростей точек звеньев механизмов высоких классов.
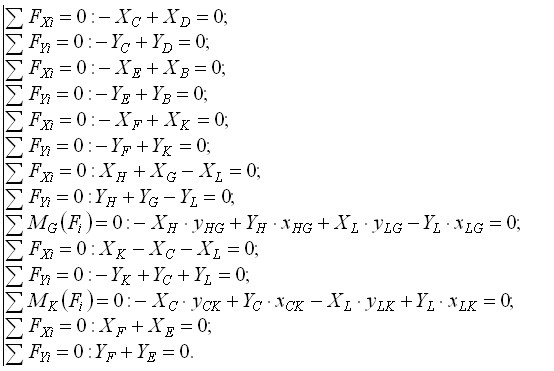 | (2) |
Неподвижные шарниры А, Н и D являются мгновенными центрами скоростей для шарнирных точек В, G, L и С, векторы скорости в которых направлены по нормали к соответствующему звену или стороне треугольного звена. Предлагаемый подход позволяет найти вектора скорости в подвижных шарнирах Е, F и К звеньев GEF и FK (рис. 4).
| Рис. 4. Мгновенные центры скоростей рычажного механизма IV класса с выстоем | Рис. 5. Справочная карта по параметрам b и е |
Последовательность графического построения мгновенных центров скоростей звеньев относительно стойки указана порядковым номером системы, которая впоследствии используется для вычисления координат соответствующих точек:
1.![]() 2.
2. 3.
3.![]() 4.
4.![]() 5.
5. 
Разработана методика получения линий уровней углов давления, критериев передачи движения, а также относительной кинематической погрешности выстоя как функций свободных кинематических параметров механизма IV класса с выстоем, позволяющий синтезировать механизм с любым набором параметров, укладывающихся в заданную область их изменения.
В качестве иллюстрации предложенной методики на рис.5 представлены справочные карты синтеза механизмов для свободных параметров кинематического синтеза b и е механизма IV класса 3-го порядка модификации -1.1.1.1, которые предназначены для анализа влияния свободных кинематических параметров на качество передачи сил и движения и кинематическую погрешность приближенного выстоя выходного звена.
В четвертой главе разработан алгоритм оптимизационного синтеза рычажных механизмов IV класса 3-го порядка по критерию кинематической погрешности выстоя с учетом дополнительных условий на основе метода ЛП-поиска Соболя-Статникова.
В качестве свободных параметров рассматриваются одиннадцать параметров, назначенных на этапе кинематического синтеза механизма IV класса с выстоем выходного звена по заданной циклограмме:
![]() .
.
Параметрические ограничения назначаются исходя из предварительного исследования области изменения свободных параметров синтеза плоского рычажного механизма IV класса с выстоем:
![]() ,
,
где ![]() - верхняя и нижняя границы возможного изменения вектора свободных параметров (i = 1, …, 11).
- верхняя и нижняя границы возможного изменения вектора свободных параметров (i = 1, …, 11).
Целевая функция L(X) представляет собой зависимость главного критерия оптимизации, а именно относительного расстояния l между положениями точки С выходного звена CD в начале интервала выстоя и в момент, когда диада НLС находиться в предельном положении, от варьируемых параметров механизма:
![]() ,
,
где - область допустимых значений вектора свободных параметров X.
В качестве функциональных ограничений выступают максимальные значения углов давления и критериев качества на всем угле поворота входного кривошипа.
![]() ,
,
где f(X) - некоторые функции от свободных параметров синтеза, в качестве которых могут выступать функции углов давления в шарнирах, критерии качества передачи сил и движения; s*, s** - соответственно минимальные и максимальные предельно допустимые значения функций.
В алгоритме оптимизационного синтеза шарнирных механизмов IV класса (рис. 6, а) совмещены обобщенные методы кинематического синтеза, анализа, модули оценки качества передачи движения, формирующие функциональные ограничения, и непосредственно блок оптимизации (рис. 6, б). Таким образом, создан единый эффективный программный продукт, автоматизирующий процесс проектирования плоских рычажных механизмов IV класса 3-го порядка математически строго реализующих заданную циклограмму с требуемой точностью.
| а) | б) |
| Рис. 6. Алгоритмы: а) решения задачи оптимизационного синтеза рычажного механизма IV класса с выстоем; б) поиска оптимального решения | |
В диссертационной работе представлена численная реализация оптимизационного точностного кинематического синтеза механизма IV класса с приближенным выстоем по заданной циклограмме. В результате среди локальных областей пространства параметров механизма обнаружены пробные точки, в которых значение критериальной функции близко к оптимальному, что подчеркивает преимущества ЛП-поиска, позволяющего вести глобальный просмотр заданного пространства.
Алгоритмы оптимизационного синтеза механизма IV класса по заданной циклограмме с требуемой точностью остановки выходного звена в крайнем положении реализованы на языке объектно-ориентированного программирования Delphi в операционной среде Windows. Созданный пакет программ (рис. 7) позволяет вести аналитический и графический синтез плоского рычажного механизма IV класса с выстоем в интерактивном режиме с предоставлением возможности визуализации кинематической схемы, движения механизма, а также построения графиков функции перемещения выходного звена, аналогов скорости и ускорения и других.
| Рис. 7. Интерфейс программы |
В пятой главе выполнен оптимизационный синтез исполнительных кривошипно-коромысловых и кривошипно-ползунных механизмов цикловых машин-автоматов для машиностроительной и полиграфической отраслей промышленности, показавший адекватность разработанных математических моделей синтеза плоских рычажных механизмов IV класса 3-го порядка с выстоем. Разработанные в настоящем исследовании методы позволили найти ряд принципиально новых кинематических схем машин, пригодных для использования в промышленности.
 | Современные печатные машины предъявляют высокие требования к производительности и качеству выпускаемой продукции, поэтому использование кривошипно-коромыслового механизма IV класса 3-го порядка с выстоем в качестве предполагаемого механизма привода тигля автомата ПТЛ-30 является обоснованным, поскольку позволит решить задачу обеспечения требуемой точности позиционирования рабочего органа и высокой производительности. На рисунке 8 представлен макет предполагаемого механизма привода тигля автомата ПТЛ-30. |
| Рис. 8. Макет механизма IV класса с выстоем |
На рисунке 9 представлены кинематические схемы кривошипно-ползунных механизмов IV класса с выстоем, синтезированные в рамках данной работы.
Предлагаемые методики апробированы на ОАО «Омском заводе подъемных машин» (г. Омск) при проектировании механизма наружного ползуна пресса глубокой вытяжки (рис. 9, а) и на ЗАО НИИ «Полиграфмаш» (г. Москва) при изготовлении прижимного механизма печатной полиграфической машины «Журналист» (рис. 9, б).
 | |
| а) | б) |
| Рис. 9. Схемы кривошипно-ползунных механизмов IV класса с выстоем: а) наружного ползуна листоштамповочного пресса глубокой вытяжки; б) прижимного механизма полиграфической машины «Журналист». | |
Результаты апробации показали эффективность применения разработанной методики оптимизационного кинематического синтеза плоских рычажных механизмов IV класса 3-го порядка с приближенным выстоем выходного звена, позволяющей обеспечить требуемое качество передачи сил и движения и получить высокую точность позиционирования рабочего органа цикловой машины-автомата на интервале выстоя конечной продолжительности.
Основные выводы
1. Выявлены 4 уровня ветвления механизма IV класса 3-го порядка с приближенным выстоем, возникающие за счет различного использования предельных положений звеньев, идентифицированных с помощью целочисленных параметров, что позволило создать более 20 сборок механизма и обеспечило возможность получения рациональных компоновок машины-автомата.
2. Разработаны универсальные модели синтеза и анализа кривошипно-коромысловых и кривошипно-ползунных механизмов IV класса 3-го порядка по заданной циклограмме с учетом их возможных модификаций для расчета кинематических характеристик и главного критерия оптимизации – кинематической погрешности выстоя, что позволило синтезировать ряд схем механизмов, интервал выстоя которых составляет от 50° до 180°, а кинематическая погрешность выстоя до оптимизации не превышает 0,05°.
3. Получены аналитические описания дополнительных условий синтеза: критериев качества передачи движения и углов давления, позволивших решить задачи кинетостатического исследования и определить направления векторов скорости шарниров звеньев механизма IV класса 3-го порядка с выстоем. Полученные значения качественных характеристик не превышали принятых для рычажных механизмов ограничений, что гарантировало получение работоспособной схемы исследуемого механизма на стадии кинематического проектирования.
4. Созданы методика и алгоритм оптимизационного кинематического синтеза рычажных механизмов IV класса 3-го порядка с выстоем, реализованные в виде пакета прикладных программ, что позволило провести серию численных экспериментов, подтвердивших адекватность разработанных математических моделей, и повысить кинематическую точность позиционирования выходного звена.
5. Спроектирована и изготовлена физическая модель кривошипно-коромыслового механизма IV класса 3-го порядка с приближенным выстоем, на которой успешно проверены предложенные теоретические положения, а также – расчеты, касающиеся точности позиционирования выходного звена и работоспособности механизма в целом.
6. Спроектирован ряд новых схем рычажных механизмов IV класса 3-го порядка с выстоем для машиностроительной и полиграфической отраслей промышленности, которые имеют существенно меньшее значение кинематической погрешности позиционирования рабочего органа, что позволит повысить качество выпускаемой продукции; синтез этих механизмов подтверждает возможность их широкого применения в технике.
Список опубликованных работ по теме диссертации
- Хомченко В. Г. Модификации и кинематический синтез рычажного механизма IV класса с выстоем выходного звена в крайнем положении по заданной циклограмме / В. Г. Хомченко, Е. С. Гебель, Е. В. Солонин // Проблемы механики современных машин. Материалы 3-ей международной конференции, том 1. – Улан-Удэ: Изд. ВСГТУ, 2006. – с. 7-10.
- Кинематический синтез и анализ рычажных механизмов IV класса с выстоем выходного звена по заданной циклограмме / В. Г. Хомченко, Е. С. Гебель, Е. В. Солонин, В. Ю. Соломин // Proc. 12th World Congr. on the TMM. – France, Beanson, 2007. – p.626-632.
- Хомченко В. Г. Модификации и кинематический синтез рычажного механизма IV класса с выстоем / В. Г. Хомченко, Е. С. Гебель, Е. В. Солонин // Омский научный вестник. Серия «Приборы, машины и технологии» – 2007. – № 2(56) – с. 65-69.
- Хомченко В. Г. Кинематический анализ рычажных механизмов IV класса с выстоем выходного звена / В. Г. Хомченко, Е. С. Гебель, Е. В. Солонин// Омский научный вестник. Серия «Приборы, машины и технологии» – 2007. – № 2(56) – с. 62-64.
- Численный метод кинематического анализа рычажных механизмов с выстоем выходного звена на основе уравнений связи / В. Г. Хомченко, Е. С. Гебель, Е. В. Солонин, А. А. Бурлаков // Динамика систем, механизмов и машин: Материалы VI междунар. науч.-техн. конф. – Омск: Изд-во ОмГТУ, 2007. – кн. 1. – с. 92-97.
- Хомченко В. Г. Моделирование работы кривошипно-ползунного механизма IV класса с приближенным выстоем по заданной циклограмме / В. Г. Хомченко, Е. С. Гебель, Е. В. Солонин // Материалы всеросс. науч. конф. молодых ученых в 7-ми частях. – Новосибирск: изд-во НГТУ, 2007. часть 1. – с. 30-32.
- Гебель Е.С. Программная реализация графоаналитического синтеза и моделирование работы плоских рычажных механизмов / Е. С. Гебель, Е. В. Солонин //Материалы всеросс. научн. конфер. молодых ученых в 7-ми частях. «Наука. Технологии. Инновации». – Новосибирск: изд-во НГТУ, 2008. – часть 1. – с. 103-105.
- К определению углов давления и критериев качества передачи движения в рычажных механизмах IV класса с остановками выходного звена по заданным циклограммам / В. С. Хорунжин, В. А. Бакшеев, А. Н. Шариков, В. Г. Хомченко, Н. Г. Скабкин, Е. С. Гебель//Омский научный вестник. Серия «Приборы, машины и технологии» – 2008. – № 1 (64) – с. 27-30.
- Интерактивное проектирование механизмов IV класса с остановками выходного звена по заданным циклограммам из условия минимизации критериев качества передачи движения и углов давления /В. С. Хорунжин, В. А. Бакшеев, А. Н. Шариков, В. Г. Хомченко, Н. Г. Скабкин, Е. С. Гебель // Омский научный вестник. Серия «Приборы, машины и технологии» – 2008. – № 2 (56) – с. 29-33.
- Гебель Е.С.Моделирование и оптимизация работы механизма IV класса с выстоем / Е. С. Гебель, Е. В. Солонин // Труды международной науч.-техн. конф. «Компьютерное моделирование 2008». – СПб.: изд-во Политехн. Ун-та, 2008. – с. 151-155.
- Гебель Е. С. Атлас модификаций кривошипно-рычажного механизма IV класса с приближенным выстоем по заданной циклограмме / Гебель Е. С., Хомченко В. Г. // Омский гос. техн. ун-т. – Омск, 2009. – 16с.: ил. – Библогр.: 1назв. – Рус. – Деп. в ВИНИТИ 24.03.2009, № 155-В2009.
- Гебель Е. С. Моделирование кинематики механизма игл основовязальной машины / Е. С. Гебель, Е. В. Солонин // Сборник материалов Х междунар. научно-практ. конф. «Теоретические знания в практические дела»: в 2 ч. – Омск.: Филиал ГОУ ВПО «РосЗИТЛП» в г. Омске, 2009. Часть 2. – с. 211 – 215.
- Проектирование механизма IV класса с выстоем выходного звена из условия оптимизации критериев качества передачи движения / В. С. Хорунжин, В. А. Бакшеев, А. Н. Шариков, В. Г. Хомченко, Н. Г. Скабкин, Е. С. Гебель // Материалы IV междунар. конф. «Проблемы механики современных машин», том 3. – Улан-Удэ: Изд. ВСГТУ, 2009. – с. 223 – 226.
ИД № 06039 от 12.10.2001г.
Подписано в печать 06.10.09. Формат бумаги 6084 1/16. Бумага офсетная.
| Усл.печ.л.1,25. Уч.-изд. л. 1,25. Тираж 120. Заказ 618. |
Издательство ОмГТУ. 644050, г. Омск, пр. Мира, 11; т. 23-02-12
Типография ОмГТУ