

Синергетического синтеза систем управления продольным движением самолетов-амфибий в условиях значительного морского волнения
На правах рукописи

НГУЕН Фыонг
МЕТОД СИНЕРГЕТИЧЕСКОГО СИНТЕЗА СИСТЕМ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТОВ-АМФИБИЙ В УСЛОВИЯХ ЗНАЧИТЕЛЬНОГО МОРСКОГО ВОЛНЕНИЯ
Специальность 05.13.01 –
«Системный анализ, управление и обработка информации»
(вычислительная техника и информатика)
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
кандидата технических наук
Таганрог – 2008
Работа выполнена на кафедре синергетики и процессов управления
Технологического института Южного федерального университета в г. Таганроге (ТТИ ЮФУ)
Научный руководитель: Заслуженный деятель науки и техники РФ, доктор технических наук, профессор
А.А. Колесников
Официальные оппоненты: доктор технических наук, профессор
И.М. Першин
доктор технических наук, профессор
С.В. Соколов
Ведущая организация: ОАО «Таганрогский авиационный научно-технический комплекс им. Г.М. Бериева»
Защита диссертации с о с т о и т с я «28» августа 2008 г.
в 14 час. 20 мин. на заседании диссертационного совета Д 212.208.22
в ТТИ ЮФУ по адресу: 347928, г. Таганрог, пер. Некрасовский, 44,
ауд. Д-406.
С диссертацией можно ознакомиться в библиотеке ЮФУ.
Автореферат разослан «15» июля 2008 г.
Ученый секретарь
диссертационного совета
д.т.н., профессор А.Н. Целых
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность проблемы. Важной проблемой теории и практики управления движением летательных аппаратов (ЛА), в том числе самолетов-амфибий (СА), является проблема проектирования автопилотов для различных режимов движения в условиях непредсказуемого воздействия окружающей природной среды. Для СА – это, в первую очередь, действие морского волнения. Современные сложные системы управления СА представляют собой комплекс различных подсистем, выполняющих определенные технологические функции и связанных между собой процессами интенсивного динамического взаимодействия и обмена энергией, веществом и информацией. Указанные системы являются нелинейными, многомерными и многосвязными, в которых протекают сложные переходные процессы и могут возникать критические и хаотические режимы. Проблемы системного синтеза являются весьма актуальными, трудными и практически недоступными для существующей теории управления.
Крупный вклад в решение этой проблемы сделан научной школой А.А. Красовского, в которой развиты методы аналитического конструирования автопилотов для разных классов летательных аппаратов на основе функционала обобщенной работы (ФОР). В работах В.Н. Букова показано эффективное применение метода ФОР с использованием прогнозирующей модели процесса управления. Развиваемые в последнее время различные методы и подходы к построению законов управления нелинейными объектами различных классов отражены в известных трудах И.В. Мирошника, В.О. Никифорова, А.Л. Фрадкова и др., где, в частности, предложены методы адаптивного управления пространственным движением. О все возрастающих требованиях к динамическим свойствам пространственного движения указанных объектов говорит, в частности, тот факт, что к современным и перспективным типам ЛА, в частности СА, в настоящее время предъявляются повышенные требования к управляемости, поскольку область применения таких аппаратов весьма широка и предполагает полет на режимах, близким к критическим. Поэтому актуальность и важность указанной проблемы не только не снижаются, но и нарастают, требуя привлечения новых подходов и методов теории синтеза систем управления.
Одной из характерных прикладных задач автоматического управления СА является задача синтеза систем управления взлетом и посадкой СА в условиях значительного волнения. В этой связи возникает задача структурной адаптации органов управления и систем механизации крыла СА к соответствующим режимам полета. Технические решения, обеспечивающие базирование и эксплуатацию самолета с водной поверхности, фактически определяют облик – его аэродинамическую схему. Поэтому ключевой в решении проблемы управления движением СА является задача синтеза таких законов управления органами механизации, которые бы минимизировали сопротивление среды, обеспечивая балансировку самолета при взлете и посадке.
Целью работы является разработка синергетического метода синтеза – аналитического конструирования законов взаимосвязанного управления продольным движением СА, учитывающих их естественные динамические свойства как нелинейных объектов механической природы при значительном влиянии морского волнения.
Направление исследований. В соответствии с поставленной целью в работе решены следующие основные задачи:
- Исследования свойств нелинейной математической модели взаимодействия СА с внешней средой при продольном движении с целью постановки задачи синтеза законов взаимосвязанного управления взлетом в условиях значительного морского возмущения;
- Разработки метода синергетического синтеза базовых законов взаимосвязанного управления продольным движением СА;
- Разработка модифицированного метода синергетического синтеза законов управления, основанных на концепции учета свойств симметрии динамики свободного полета СА;
- Разработки процедуры синтеза законов управления продольным движением СА с динамическими нелинейными наблюдателями состояния;
- Разработки процедуры синтеза астатических законов управления взлетом СА с целью парирования воздействий со стороны внешней среды.
Методы исследования. Для решения поставленных в диссертации задач использовались методы динамики твердого тела, аэродинамики и гидродинамики, современной нелинейной динамики, синергетической теории управления, теории дифференциальных уравнений. Исследование динамических свойств синтезированных нелинейных систем управления движением СА осуществлялись в пакете прикладных программ Maple11, а также на имитационном пилотажно-навигационном комплексе ТАНТК им. Г.М. Бериева.
Обоснованность научных положений и достоверность результатов исследований подтверждается согласованностью результатов теоретических исследований и компьютерного моделирования полученных замкнутых систем управления движением СА.
Научная новизна результатов диссертации заключается в следующем. Применение принципов и методов синергетической теории управления для синтеза систем управления продольным движением СА в условиях значительного морского волнения приведет к появлению систем управления СА нового поколения, характерными отличительными особенностями которых будут:
- учет естественных нелинейных свойств и процессов взаимодействия СА и внешней среды;
- адаптивность к изменению внутренних параметров и действию внешних возмущающих факторов со стороны технологической и природной среды;
- асимптотическая устойчивость движения СА, эффективное противостояние экстремальным режимам их функционирования.
На защиту выносятся следующие научные положения:
- Нелинейная математическая модель взаимодействия СА с внешней средой при его продольном движении;
- Метод синергетического синтеза базовых и модифицированных законов взаимосвязанного управления продольным движением СА на основе полученной нелинейной математической модели движения и концепции учета свойств динамики свободного движения;
- Процедуры синергетического синтеза законов управления продольным движением СА с наблюдателями внешних возмущений (НВВ);
- Процедура синергетического синтеза астатических гарантирующих регуляторов, обеспечивающих асимптотическую устойчивость движения в условиях значительного морского волнения.
Практическая ценность работы. Разработанный в диссертации метод аналитического конструирования законов управления движением СА может быть применен для разработки перспективных имитационных пилотажно-навигационных комплексов и послужить основой для улучшения летно-технических характеристик СА.
Реализация результатов. Полученные в диссертации научные и прикладные результаты нашли применение на Таганрогском авиационном научно-техническом комплексе (ТАНТК) им. Г.М. Бериева при разработке нового программно-моделирующего пилотажно-навигационного комплекса, а также в учебном процессе кафедры синергетики и процессов управления Таганрогского технологического института Южного федерального университета (ТТИ ЮФУ).
Апробация работы. Научные и прикладные результаты диссертационной работы докладывались и обсуждались на: Международной научной конференции «Системный синтез и прикладная синергетика (ССПС–2006), г. Пятигорск; VIII Международной научно-технической конференции по динамике технологических систем «ДТС-2007», г. Ростов-на-Дону; 8ой международной научно-технической конференции «Кибернетика и высокие технологии XXI века» (C&T*2007), г. Воронеж; 54ой научно-технической конференции профессорско-преподавательского состава, аспирантов и сотрудников ТТИ ЮФУ (НТК ППС); конференции «Инновационные технологии XXI века в информатике, управлении и образовании», г. Нальчик, 2008 г. Часть результатов исследований представлена в докладах, включенных в программы 5ой научной конференции «Управление и информационные технологии» (УИТ-2008) в рамках II Российской мультиконференции по проблемам управления, г. С-Петербург и международной научной конференции по гидроавиации «Гидроавиасалон–2008».
Публикации: всего соискателем по теме диссертации опубликовано 14 печатных работ.
Структура и объем диссертации: диссертация состоит из введения, трех глав, заключения, списка литературы и приложения. Основное содержание диссертации изложено на 135 страницах, содержит 74 рисунка и 2 таблицы.
КРАТКОЕ СОДЕРЖАНИЕ РАБОТЫ
Во введении определена научная проблематика работы, обоснована актуальность темы, поставлены цели и задачи работы.
В первой главе рассмотрена область применения СА, показана актуальность проблемы управления движением СА, выполнен обзор и анализ современных методов синтеза нелинейных систем, применимых к задачам управления пространственным движением. Поставлена системная проблема проектирования регуляторов для управления движением СА в условиях морского волнения.
В обзоре, выполненном в главе, произведен анализ направлений современной теории управления и современных методов синтеза систем управления ЛА. Отмечено, что одной из тенденций в развитии проблемы управления ЛА в последнее время является использование современных методов синергетики и нелинейной динамики, в том числе теории бифуркаций и теории хаотических систем. Указанное направление развивается на кафедре аэрокосмических исследований Бристольского университета в Великобритании, а также на кафедре синергетики и процессов управления ТТИ ЮФУ. Также в главе представлены основные положения синергетического метода аналитического конструирования нелинейных агрегированных регуляторов (АКАР), который в дальнейшем используется для решения нелинейной проблемы управления движением СА. Отдельно рассмотрена методика синтеза нелинейных динамических регуляторов с НВВ.
Во второй главе выполнен анализ нелинейных моделей движения СА как твердого тела, в частности модели их продольного движения. Проведено исследование процессов взаимодействия СА с воздушной и водной средами при его продольном движении. Получены аналитические выражения, описывающие аэродинамические и гидродинамические силы и моменты. При этом математическая модель продольного движения описывается системой дифференциальных уравнений 6-го порядка:
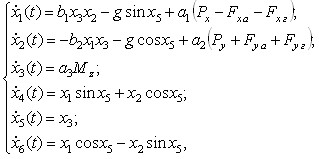 | (1) |
где обозначено: ![]() – проекции вектора скорости
– проекции вектора скорости ![]() на соответствующие оси связанной системы координат;
на соответствующие оси связанной системы координат; ![]() – продольная угловая скорость
– продольная угловая скорость ![]() ;
; ![]() ,
, ![]() – проекции координат центра тяжести СА на оси
– проекции координат центра тяжести СА на оси ![]() и
и ![]() соответственно;
соответственно; ![]() – угол тангажа
– угол тангажа ![]() ;
; ![]() – масса самолета;
– масса самолета; ![]() – «присоединенные» массы СА;
– «присоединенные» массы СА; ![]() – проекции суммарного вектора аэродинамических сил на соответствующие оси связанной системы координат
– проекции суммарного вектора аэродинамических сил на соответствующие оси связанной системы координат ![]() и
и ![]() ;
; ![]() – проекции суммарного вектора гидродинамических и гидростатических сил на соответствующие оси связанной системы координат
– проекции суммарного вектора гидродинамических и гидростатических сил на соответствующие оси связанной системы координат ![]() и
и ![]() ;
; ![]() – проекции суммарной силы тяги двигателей;
– проекции суммарной силы тяги двигателей; ![]() – суммарный продольный аэродинамический момент и продольный момент, создаваемый гидродинамическими и гидростатическими силами;
– суммарный продольный аэродинамический момент и продольный момент, создаваемый гидродинамическими и гидростатическими силами; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() .
.
Сила тяги двигателя ![]() , создаваемая реактивными двигателями, есть функция режима работы двигателя (положения ручки управления), скорости и высоты полета
, создаваемая реактивными двигателями, есть функция режима работы двигателя (положения ручки управления), скорости и высоты полета ![]() . Компоненты вектора аэродинамических силы и момента зависят от условий обтекания и конструктивных параметров СА и определяются по формулам:
. Компоненты вектора аэродинамических силы и момента зависят от условий обтекания и конструктивных параметров СА и определяются по формулам:
 |
где ![]() – безразмерные коэффициенты аэродинамических сил,
– безразмерные коэффициенты аэродинамических сил, ![]() – характерная площадь обтекания (мидель фюзеляжа, площадь крыла или эквивалентной поверхности в плане), к которой относят все силы и моменты, действующие на СА,
– характерная площадь обтекания (мидель фюзеляжа, площадь крыла или эквивалентной поверхности в плане), к которой относят все силы и моменты, действующие на СА, ![]() – размаха крыла,
– размаха крыла, ![]() – средняя аэродинамическая хорда крыла,
– средняя аэродинамическая хорда крыла, ![]() – безразмерные коэффициенты аэродинамических моментов,
– безразмерные коэффициенты аэродинамических моментов, ![]() – скоростной напор, зависящий от воздушной скорости
– скоростной напор, зависящий от воздушной скорости ![]() и плотности воздуха:
и плотности воздуха: ![]() . Гидродинамические силы и моменты определяются с использованием численных методов (метода конечных элементов и методом плоских сечений) или аналогичным способом определения аэродинамических компонентов, но с учетом водной среды. Величины коэффициентов аэродинамических и гидродинамических сил и моментов зависят от условий обтекания, углов атаки
. Гидродинамические силы и моменты определяются с использованием численных методов (метода конечных элементов и методом плоских сечений) или аналогичным способом определения аэродинамических компонентов, но с учетом водной среды. Величины коэффициентов аэродинамических и гидродинамических сил и моментов зависят от условий обтекания, углов атаки ![]() и скольжения
и скольжения ![]() , формы корпуса СА и т. д. Их определяют либо с помощью упрощенных расчетных соотношений, либо путем модельных испытаний в бассейнах и аэродинамических трубах. В общем случае они являются сложными функциями конфигурации СА (его компоновки, положения рулевых органов) и условий полета, и записываются в виде нелинейных зависимостей:
, формы корпуса СА и т. д. Их определяют либо с помощью упрощенных расчетных соотношений, либо путем модельных испытаний в бассейнах и аэродинамических трубах. В общем случае они являются сложными функциями конфигурации СА (его компоновки, положения рулевых органов) и условий полета, и записываются в виде нелинейных зависимостей:
где ![]() – угловое положение (отклонение) рулевых органов;
– угловое положение (отклонение) рулевых органов; ![]() – число Маха;
– число Маха; ![]() – звуковая скорость на высоте полета.
– звуковая скорость на высоте полета.
В третьей главе рассматриваются процедуры синтеза синергетических законов взаимосвязанного управления движением СА с учетом различных подходов. В п. 3.1 на основе метода АКАР и математической модели движения СА, полученной во второй главе, разработана процедура аналитического синтеза законов управления продольным движением СА. На основе учета свойств симметрии динамики свободного движения ЛА разработан метод синтеза модифицированных законов управления СА, учитывающих симметрию свободного движения СА. Приводятся результаты компьютерного моделирования полученных замкнутых управления СА, выполнено сравнение разработанных законов управления.
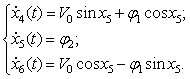
Базовые законы синергетического управления СА. На основе метода АКАР в главе развита процедура синтеза законов взаимосвязанного управления продольным движением СА. При этом используется основная нелинейная модель пространственного движения твердого тела, записанная через углы Эйлера
 | (2) |
где ![]() ,
, ![]() ,
, ![]() – управляющие воздействия.
– управляющие воздействия.
Задача синтеза заключается в следующем: требуется найти в аналитической форме вектор управления ![]() , обеспечивающий перевод СА из произвольного начального состояния в области допустимых значений координат состояния сначала на пересечение притягивающих инвариантных многообразий (ИМ)
, обеспечивающий перевод СА из произвольного начального состояния в области допустимых значений координат состояния сначала на пересечение притягивающих инвариантных многообразий (ИМ) ![]() , а затем в заданное состояние, определяемое следующими целями:
, а затем в заданное состояние, определяемое следующими целями:
- движение СА по водной поверхности с заданной скоростью;
- выход на редан и отрыв от водной поверхности с поддержанием угла тангажа
 в заданных пределах;
в заданных пределах; - набор высоты
 и движение в продольной вертикальной плоскости с заданной воздушной скоростью
и движение в продольной вертикальной плоскости с заданной воздушной скоростью  .
.
Рассмотрим основные этапы предложенной процедуры синергетического синтеза законов управления на основе введения параллельно-последовательной совокупности ИМ. Согласно методу АКАР, для модели (2) сначала введена первая совокупность макропеременных:
 | (3) |
которые должны удовлетворять системе функциональных уравнений
| (4) |
где: ![]() – постоянные времени, влияющие на качество динамики процессов в замкнутой системе;
– постоянные времени, влияющие на качество динамики процессов в замкнутой системе; ![]() ,
, ![]() – некоторые функции связи, подлежащие выбору в дальнейшей процедуре синтеза. Согласно методу АКАР, на ИМ
– некоторые функции связи, подлежащие выбору в дальнейшей процедуре синтеза. Согласно методу АКАР, на ИМ ![]() минимизируются сопровождающие оптимизирующие функционалы:
минимизируются сопровождающие оптимизирующие функционалы:
| (5) |
На пересечении ИМ ![]() ,
, ![]() наблюдается эффект динамического «сжатия фазового пространства», а уравнения декомпозированной системы будут иметь вид:
наблюдается эффект динамического «сжатия фазового пространства», а уравнения декомпозированной системы будут иметь вид:
 | (6) |
Далее для декомпозированной системы (6) введена вторая совокупность макропеременных
| (7) |
Таким образом, в результате применения процедуры синтеза на основе метода АКАР был получен вектор внешних управлений, обеспечивающий желаемое движение замкнутой системы «СА–автопилот». Выражения для законов управления приведены в тексте диссертации.
Определение законов управления автопилота относительно углов отклонения ![]() управляющих поверхностей СА в общем случае сводится к решению системы алгебраических уравнений вида:
управляющих поверхностей СА в общем случае сводится к решению системы алгебраических уравнений вида:
| (8) |
где ![]() и
и ![]() получены в результате применения рассмотренной выше процедуры синтеза, а аэродинамические коэффициенты
получены в результате применения рассмотренной выше процедуры синтеза, а аэродинамические коэффициенты ![]() и
и ![]() находятся в известной зависимости от
находятся в известной зависимости от ![]() и параметров полета. Вид функциональной зависимости правой части уравнений (8) определяется компоновочной схемой рассматриваемого СА. Для управления полетом необходимо изменять силы
и параметров полета. Вид функциональной зависимости правой части уравнений (8) определяется компоновочной схемой рассматриваемого СА. Для управления полетом необходимо изменять силы ![]() и моменты сил
и моменты сил ![]() , действующие на СА посредством отклонения управляющих поверхностей и изменением режима работы его двигателей. На рис. 1 показана схема СА с возможным расположением рулевых органов.
, действующие на СА посредством отклонения управляющих поверхностей и изменением режима работы его двигателей. На рис. 1 показана схема СА с возможным расположением рулевых органов.

Рис. 1. Возможные органы
управления самолета-амфибии
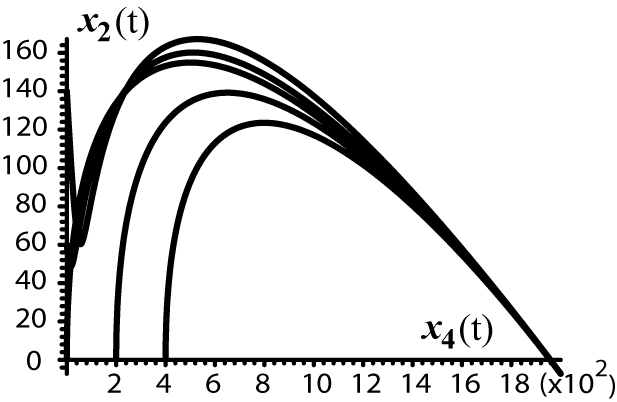
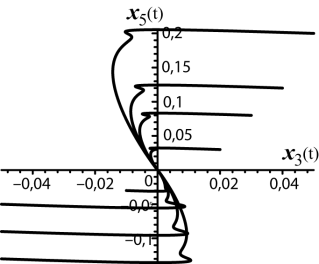
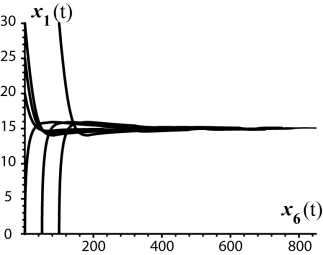
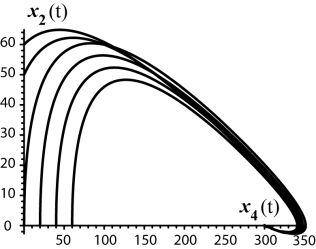
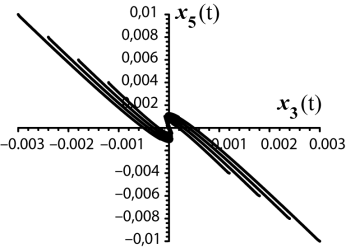
Результаты компьютерного моделирования замкнутой системы «СА-автопилот» представленные на рис. 2–5, подтверждают выдвинутые основные теоретические положения. Таким образом, синтезированные законы управления обеспечивают асимптотическую устойчивость замкнутых нелинейных систем и реализуют поставленные цели управления.
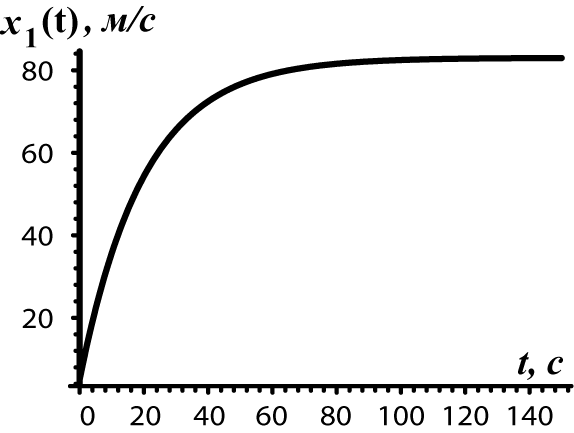 | 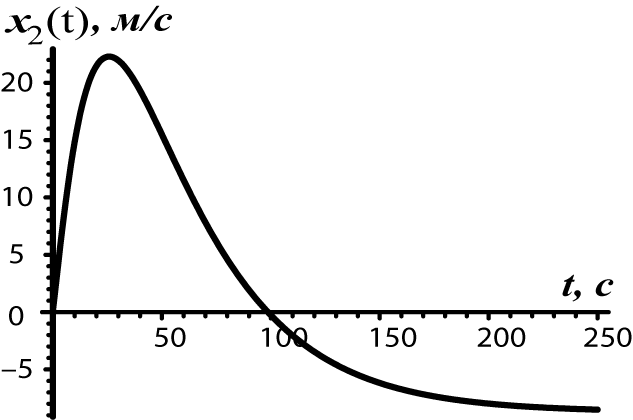 | 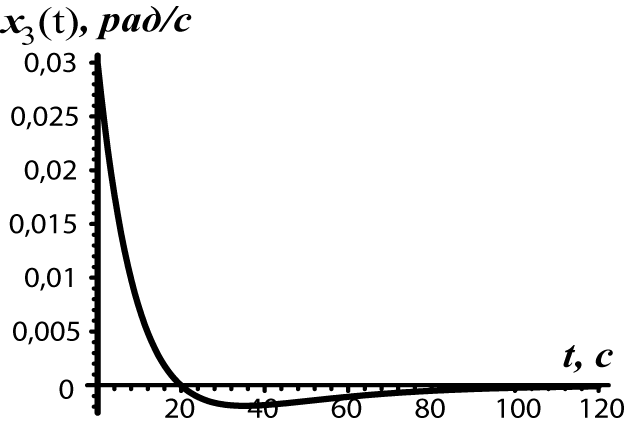 |
| Рис.2. Переходные процессы относительно линейных и угловой скоростей | ||
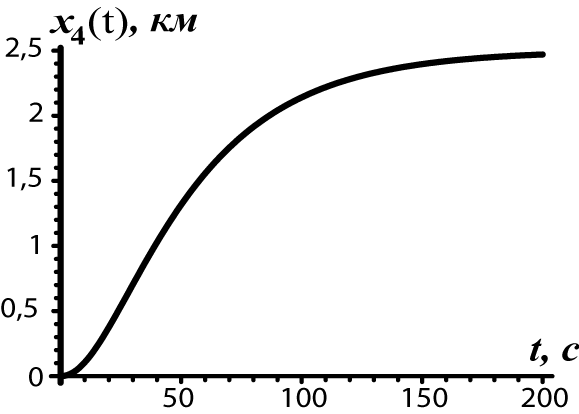 | 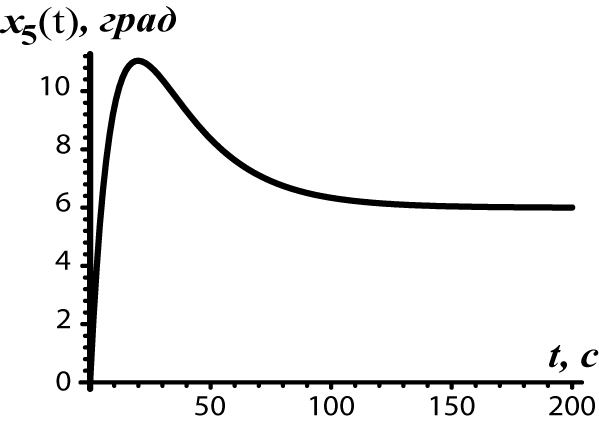 | 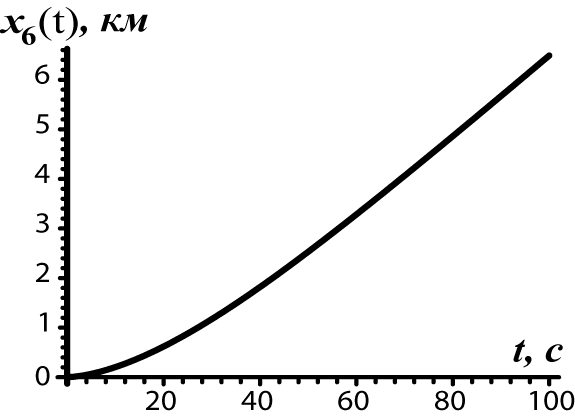 |
| Рис. 3. Переходные процессы относительно высоты полета, угла тангажа и дальности полета соответственно | ||
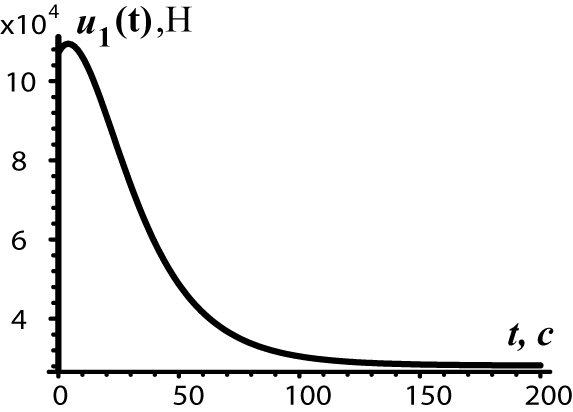 | 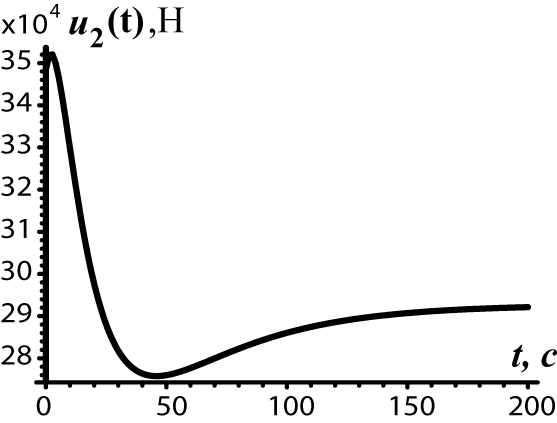 | 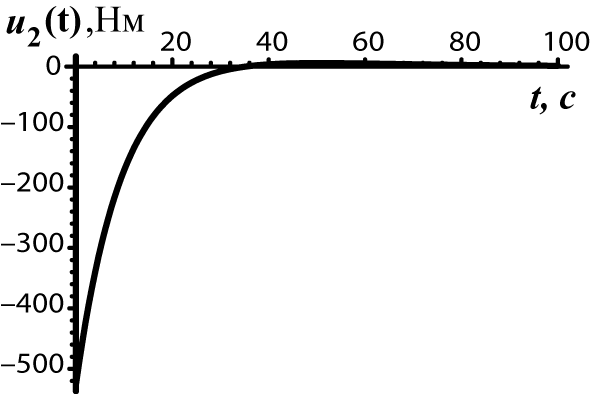 |
| Рис. 4. Переходные процессы относительно управляющих воздействий | ||
 |  |  |
| Рис. 5. Проекции фазовых траекторий системы на плоскости, образованные соответствующими компонентами линейных, угловых скоростей и координат | ||
Базовые законы управления осуществляют декомпозицию задачи синтеза локальных алгоритмов управления, которая теперь сводится к определению зависимостей от углов отклонения управляющих поверхностей, это означает, что полученные законы векторного управления в дальнейшем могут быть использованы в качестве уставок на последующих этапах синтеза конкретных алгоритмов управления автопилотов, непосредственно выдающих задания органам управления СА.
Модифицированные законы синергетического управления СА. Представляется целесообразным исследовать структуру базовых законов управления продольным движением на основе идеологии учета собственных динамических свойств СА, развиваемой в работах А.А. Красовского и А.А. Колесникова. Известно, что СА, как механическая система, в свободном, неуправляемом ![]() движении описывается уравнениями Лагранжа второго рода:
движении описывается уравнениями Лагранжа второго рода:
| (9) |
где ![]() — функция Лагранжа, равная разности кинетической
— функция Лагранжа, равная разности кинетической ![]() и потенциальной
и потенциальной ![]() энергий;
энергий; ![]() – обобщенные координаты;
– обобщенные координаты; ![]() – обобщенные скорости;
– обобщенные скорости; ![]() – неотрицательная диссипативная функция.
– неотрицательная диссипативная функция.
В ряде режимов свободного движения диссипативной функцией можно пренебречь, т.е. ![]() , и тогда уравнения (9) будут описывать поведение консервативной системы. Для такого класса систем наиболее подходящей функцией Ляпунова, как известно, может служить полная энергия СА:
, и тогда уравнения (9) будут описывать поведение консервативной системы. Для такого класса систем наиболее подходящей функцией Ляпунова, как известно, может служить полная энергия СА:
| (10) |
Согласно теории устойчивости А.М. Ляпунова, в этом случае для выявления свойства устойчивости свободного движения ЛА необходимо исследовать на знак производную функции ![]() по времени:
по времени:
| (11) |
Очевидно, что в силу фундаментального закона сохранения энергии производная ![]() для ЛА, описываемого уравнениями (9), либо равна диссипативной функции
для ЛА, описываемого уравнениями (9), либо равна диссипативной функции ![]() , взятой с обратным знаком
, взятой с обратным знаком
либо равна нулю ![]() при
при ![]() . Тогда при синтезе законов управления нелинейными объектами из их моделей вида
. Тогда при синтезе законов управления нелинейными объектами из их моделей вида
| (12) |
можно исключить все те функции ![]() , для которых выполняется свойство
, для которых выполняется свойство ![]() без потери асимптотической устойчивости замкнутой системы по сравнению с базовыми законами управления. Применение изложенного подхода для рассматриваемого объекта приводит к тому, что при синергетическом синтезе законов управления функции
без потери асимптотической устойчивости замкнутой системы по сравнению с базовыми законами управления. Применение изложенного подхода для рассматриваемого объекта приводит к тому, что при синергетическом синтезе законов управления функции ![]() и
и ![]() , входящие в первые два уравнения модели (2), можно не учитывать без потери устойчивости замкнутой системы.
, входящие в первые два уравнения модели (2), можно не учитывать без потери устойчивости замкнутой системы.
В диссертации представлены результаты компьютерного моделирования замкнутой системы с модифицированными законами управления, которые полностью обеспечивают асимптотическую устойчивость системы. Это в полной мере подтверждает выдвинутую профессором А.А. Колесниковым концепцию синтеза модифицированных законов управления пространственным движением ЛА с учетом их собственных динамических свойств.
Далее в п.3.2 на основе разработанного в предыдущем разделе метода рассматривается синтез законов управления продольным движением СА с наблюдателями внешних возмущений (НВВ). Предполагается, что поведение СА и внешних возмущений, действующих на него, можно описать системой дифференциальных уравнений:
| (13) |
где ![]() -вектор
-вектор ![]() и
и ![]() -вектор
-вектор ![]() – компоненты вектора возмущающих воздействий;
– компоненты вектора возмущающих воздействий; ![]() – вектор управления;
– вектор управления; ![]() и
и ![]() – непрерывные нелинейные функции. Вектор
– непрерывные нелинейные функции. Вектор ![]() предполагается наблюдаемым, а вектор
предполагается наблюдаемым, а вектор ![]() – ненаблюдаемым. Тогда задача синтеза НВВ может быть сформулирована следующим образом: необходимо синтезировать НВВ, который должен обеспечить:
– ненаблюдаемым. Тогда задача синтеза НВВ может быть сформулирована следующим образом: необходимо синтезировать НВВ, который должен обеспечить:
- асимптотическую устойчивость замкнутой системы «СА-автопилот»;
- стабилизацию угла тангажа, высоты и скорости полета;
- оценку ненаблюдаемых внешних возмущений;
- компенсацию внешних возмущений.
Структура синтезируемого наблюдателя:
| (14) |
где ![]() – вектор состояния наблюдателя,
– вектор состояния наблюдателя, ![]() – вектор оценок незмеряемых внешних возмущений.
– вектор оценок незмеряемых внешних возмущений.
Процедура синтеза НВВ состоит из трех этапов:
- синтез законов управления
 , обеспечивающих выполнение требуемой технологической задачи (при этом предполагает, что все переменные состояния объекта управления наблюдаемы);
, обеспечивающих выполнение требуемой технологической задачи (при этом предполагает, что все переменные состояния объекта управления наблюдаемы); - синтез наблюдателя для неизмеряемых возмущений;
- замена ненаблюдаемых переменных в синтезируемых управлениях их оценками.
Этап синтеза законов управления ![]() аналогичен разработанному в разделе 3.1 методу, при этом в исходную модель (2) в три первых уравнения необходимо добавить возмущающие силы
аналогичен разработанному в разделе 3.1 методу, при этом в исходную модель (2) в три первых уравнения необходимо добавить возмущающие силы ![]() и момент
и момент ![]() волнового возмущения и дополнить уравнениями модели волнового возмущения. Очевидно, что волновое возмущение имеет гармонический характер и может быть описано следующей системой дифференциальных уравнений
волнового возмущения и дополнить уравнениями модели волнового возмущения. Очевидно, что волновое возмущение имеет гармонический характер и может быть описано следующей системой дифференциальных уравнений
| (15) |
В случае ударного возмущения следует использовать его модель имеет вид ![]() (16)
(16)
Выражения НВВ, полученные в результате применения процедуры синтеза для системы (2), (15), имеют вид:
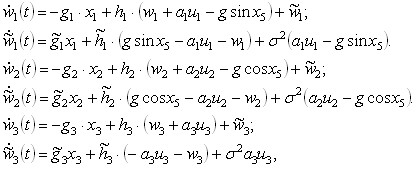 | (17) |
где ![]() – оценки переменных состояния,
– оценки переменных состояния,![]() – неизмеряемые состояния возмущения,
– неизмеряемые состояния возмущения, ![]() – постоянные коэффициенты. А для системы (2), (16):
– постоянные коэффициенты. А для системы (2), (16):
 | (18) |
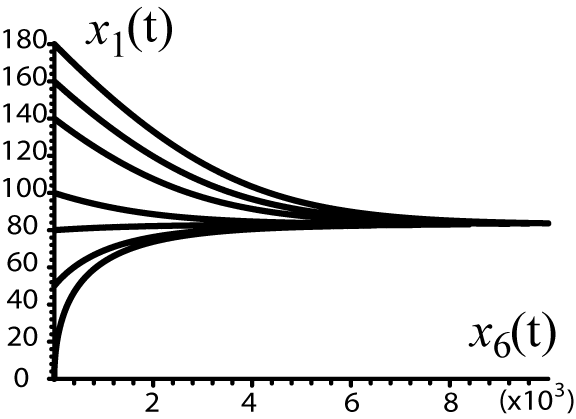
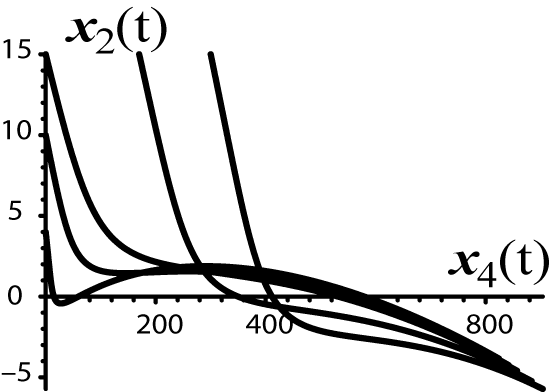
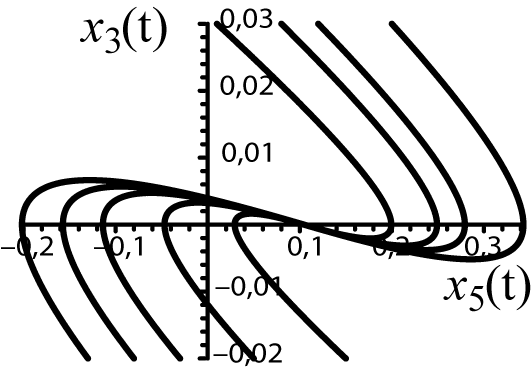
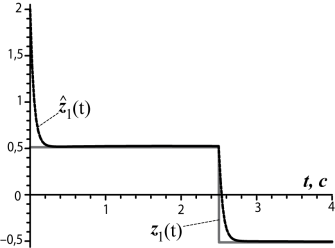
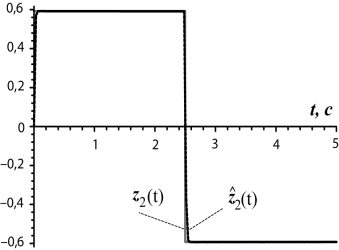
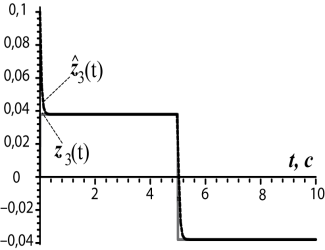
Компьютерное моделирование замкнутой системы подтверждает факт ее адаптации к действию внешних возмущений. На рис. 6–8 представлены переходные процессы относительно возмущений ![]() и их оценки
и их оценки ![]() , а также проекции фазовых траекторий системы на плоскости.
, а также проекции фазовых траекторий системы на плоскости.
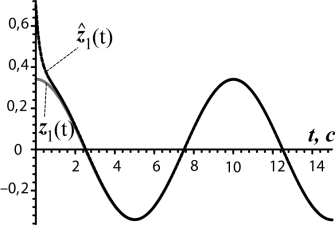 | 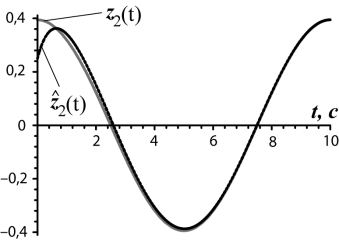 | 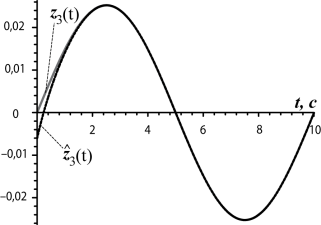 | |
| Рис.6. Графики гармонических возмущений | |||
 |  |  | |
| Рис. 7. Графики кусочно-постоянных возмущений | |||
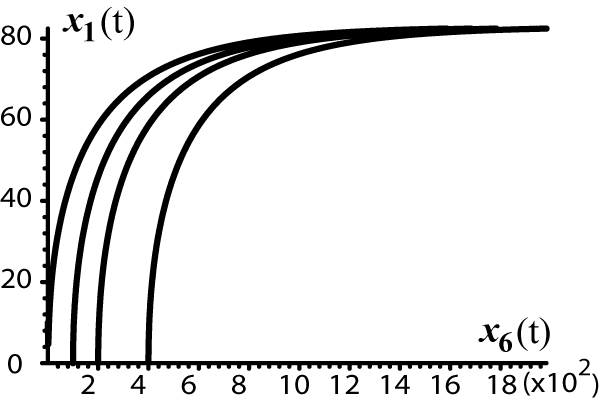 |  |  | |
| Рис. 8. Проекции фазовых траекторий системы на плоскости, образованные соответствующими компонентами линейных, угловых скоростей и координат | |||
В п.3.3 проведено исследование морского волнения различного вида, выделен класс наихудших возмущающих воздействий на СА при его движении на воде. Синтезированные в п.3.2 наблюдатели позволяет осуществить текущую идентификацию внешних возмущений, действующих на СА. Возникающие при этом технические трудности состоят в следующем: модель объекта должна быть достаточно точной, а динамика наблюдателя – более быстрой по сравнению с динамикой изменения внешних возмущений. Эти обстоятельства ухудшают практическую эффективность наблюдателей. Разумеется, что можно построить и такие наблюдатели, которые идентифицируют параметры и координаты состояния модели СА. Однако, в целом, это может привести к существенному усложнению законов управления движением СА. В этой связи возникает идея построения т.н. «гарантирующих регуляторов», которые парируют наихудшие внешние возмущения на СА, а реализация таких регуляторов является достаточно простой. При построении таких регуляторов будем опираться на следующее определение наихудших возмущений, предложенное проф. А.А Колесниковым: «наихудшие – это такие внешние возмущения, которые за наименьшее время отклоняют объект управления (СА) на максимальное возможное расстояние от желаемого состояния в его фазовом пространстве». Указанное определение по существу, означает «быстродействие наоборот». Из него, согласно принципу максимума Л.С. Понтрягина, непосредственно следует, что наихудшие воздействия – это кусочно-постоянные возмущения вида ![]() со случайным изменением их знака, т.е. функции
со случайным изменением их знака, т.е. функции ![]() . Очевидно, что весьма неблагоприятным воздействием при движении СА по воде будет, когда
. Очевидно, что весьма неблагоприятным воздействием при движении СА по воде будет, когда ![]() , где
, где ![]() – основная частота колебаний СА. Для парирования кусочно-постоянных возмущений гарантирующий регулятор, очевидно, должен включать в себя интеграторы, т.е. астатические законы управления, техническая реализация которых не вызывает затруднений.
– основная частота колебаний СА. Для парирования кусочно-постоянных возмущений гарантирующий регулятор, очевидно, должен включать в себя интеграторы, т.е. астатические законы управления, техническая реализация которых не вызывает затруднений.
В п.3.4 рассматривается метод синтеза астатических законов управления СА в условиях значительного морского волнения. При этом сложность проблемы управления СА заключается в том, что волновые возмущения являются случайными процессами. Для решения данной проблемы используется идея введения в законы управления дополнительных динамических звеньев, отражающих внешние кусочно-постоянные возмущения. При этом в исходную систему (2) добавляются переменные состояния возмущений ![]() и в результате записывается модель возмущающих воздействий, учитывающая требования выполнения желаемых технологических инвариантов:
и в результате записывается модель возмущающих воздействий, учитывающая требования выполнения желаемых технологических инвариантов:
| (19) |
где ![]() – постоянные коэффициенты.
– постоянные коэффициенты.
При синтезе законов управления, согласно методу АКАР, вводятся инвариантные многообразия
 | (20) |
 |
Выражения управления ![]() , полученные в результате применения процедуры синтеза, имеет вид:
, полученные в результате применения процедуры синтеза, имеет вид:
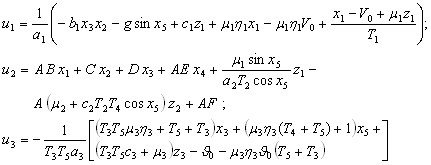 | (21) |
где обозначено:
![]() ;
; ![]() ;
; ![]() ;
;
 ;
;![]() ;
; .
.
Результаты моделирования замкнутой системы с синтезированными астатическими законами управления представлены на рис 9. Из графиков видно, что синтезированные астатические законы управления эффективно парируют действия внешних возмущений разного вида и обеспечивают выполнение целей управления.
 |  |  |
| Рис. 9. Проекции фазовых траекторий системы на плоскости, образованные соответствующими компонентами линейных, угловых скоростей и координат | ||
В заключении к диссертации приводятся перечень основных научных и прикладных результатов, полученных в процессе разработки синергетических методов управления продольным движением СА в условиях значительного морского волнения. В приложении приведены результаты сравнения базовых и модифицированных законов управления движением СА в различных режимах полета, а также в условиях волнения различного типа.
ЗАКЛЮЧЕНИЕ
В диссертации рассмотрен синергетический подход к проблеме синтеза эффективных законов взаимосвязанного управления продольным движением СА в условиях значительного морского волнения, в частности при его взлете с водной поверхности и посадке.
Конкретные результаты диссертации состоят в следующем:
- разработан синергетический метод синтеза базовых законов управления продольным движением СА на основе нелинейной динамической модели, позволяющий получить новые алгоритмы управления продольным движением для достаточно общего класса СА;
- разработан синергетический метод синтеза модифицированных законов с учетом динамических особенностей свободного движения СА, позволяющий упростить законы систем управления без потери динамических свойств замкнутой системы «СА-автопилот»;
- разработана процедура синтеза законов управления продольным движением СА с нелинейными наблюдателями внешних возмущений, обеспечивающих устойчивость движения СА и выполнение целей управления;
- разработана эффективная процедура синтеза гарантирующих астатических законов управления взлетом СА, позволяющих существенно улучшить динамику движения СА и адаптацию к реальным условиям морского волнения.
Полученные результаты целесообразно использовать при проектировании нового класса управляющего комплекса для СА. Разработанные методы синтеза систем управления продольным движением СА могут быть применены при проектировании нового поколения пилотажно-навигационных комплексов и автопилотов, формирующих эффективную аэродинамику СА в зависимости от желаемых режимов полета и действий внешней среды.
СПИСОК ПУБЛИКАЦИЙ ПО ТЕМЕ ДИССЕРТАЦИИ
- Нгуен Ф. Исследование плавучести и остойчивости гидросамолета. Известия ТРТУ. Специальный выпуск. Технические науки. Материалы LII НТК ППС, аспирантов и сотрудников ТРТУ. – Таганрог: Изд-во ТРТУ, 2006 г. –№9 (64). –С. 166-170.
- Нгуен Ф. Моделирование пространственного движения гидросамолета: исследование режима глиссирования//Сборник докладов Международной научной конференции «Системный синтез и прикладная синергетика», 3-5 октября 2006 г., Пятигорск. – Пятигорск: РИА-КМВ, 2006 г. – С. 119–122.
- Нгуен Ф. Моделирование пространственного движения гидросамолета: исследование модели взлета гидросамолета. Тезисы докладов VIII Всероссийской научной конференции студентов и аспирантов «Техническая кибернетика, радиоэлектроника и системы управления». 19-20 октября 2006 г. –Таганрог: Изд-во ТРТУ. – С. 364–365.
- Нгуен Ф. Построение законов управления продольным движением гидросамолета при условии волнения: синергетический подход. Межвузовский научный сборник «Управление и информационные технологии», Пятигорск, 2007 г. – С. 37–42.
- Нгуен Ф. Математическая модель для моделирования процессов взаимодействия летательных аппаратов гидроавиации с водной средой. Материалы VIII Международной научно-технической конференции «Кибернетика и высокие технологии XXI века». – Воронеж: Изд-во ВГТУ, 2007 г. – Т. 1. – С. 406–409.
- Нгуен Ф. Синергетический синтез нелинейных законов управления продольным движением гидросамолета в условия действия внешней среды. Известия ТТИ ЮФУ. Технические науки. Материалы 53-й НТК ППС ТТИ ЮФУ. – Таганрог: Изд-во ТТИ ЮФУ, 2008 г., № 1. – С. 133.
- Нгуен Ф. Синергетический синтез законов управления продольным движением гидросамолета при условии волнения. Материалы VIII Международной научно-технической конференции по динамике технологических систем «ДТС-2007». – Ростов-на-Дону: Изд-во ДГТУ, 2007 г. – С. 94-98.
- Нгуен Ф. Синергетический подход к построению законов управления продольным движением гидросамолета при условии волнения. Материалы конференции «Инновационные технологии XXI века в информатике, управлении и образовании», 10-11 апреля 2008 г., Нальчик. –Нальчик, 2008 г.
- Кобзев В.А, Колесников А.А., Нгуен Ф. Проблемы управления взлетом гидросамолетов в условиях действия возмущений внешней среды. Сборник докладов VIII научной конференции по гидроавиации «Гидроавиасалон–2008». –М.: Изд-во ЦАГИ, 2008 г. – С. 56-67.
- Nguyen F. Problems of amphibian’s take-off control under conditions of environment indignations influence. Тезисы докладов VIII научной конференции по гидроавиации «Гидроавиасалон–2008». –М.: Изд-во ЦАГИ, 2008 г.
- Нгуен Ф. Синергетический синтез законов управления движением самолета-амфибии при морском волновом возмущении. Материалы V Научной конференции «Управление и информационные технологии» (УИТ-2008) в рамках II Российской мультиконференции по проблемам управления. СПб.: 2008 г.
- Нгуен Ф. Синергетический подход к подавлению внешних возмущений, действующих на гидросамолет при взлете //Известия ТТИ ЮФУ. Технические науки. Специальный выпуск. 54 – НТК ТТИ ЮФУ (в печ.), 2009 г., № 1.
- Нгуен Ф. Исследование и построение модели возмущающих воздействий внешней среды при взлете гидросамолета//Тезисы докладов IX Всероссийской научной конференции студентов и аспирантов «Техническая кибернетика, радиоэлектроника и системы управления». –Таганрог: Изд-во ТТИ ЮФУ, 2008 г.
- Нгуен Ф. Синергетический синтез законов управления движением гидросамолета с нелинейным наблюдателем состояния//Тезисы докладов IX Всероссийской научной конференции студентов и аспирантов «Техническая кибернетика, радиоэлектроника и системы управления». –Таганрог: Изд-во ТТИ ЮФУ, 2008 г.
В совместных работах [9] автору принадлежит обоснование метода синтеза астатических регуляторов с интеграторами.

Соискатель Ф. Нгуен
ЛР № 020565 от 23.06.97 г.
Подписано в печать Формат 60х84 1/16
Бумага офсетная. Печать офсетная. Усл. п.л. – 1
Тираж 100 экз. Заказ №
“C”
Издательство ТТИ ЮФУ
ГСП 17 А, Таганрог – 28, Некрасовский, 44.
Типография ТТИ ЮФУ
ГСП 17 А, Таганрог – 28, Энгельса, 1