

Автоматизация процессов контроля и диагностики в системах железнодорожной автоматики и телемеханики на основе волноводно-оптических технологий
На правах рукописи
Прокопенко Сергей Анатольевич
АВТОМАТИЗАЦИЯ ПРОЦЕССОВ КОНТРОЛЯ И ДИАГНОСТИКИ В СИСТЕМАХ ЖЕЛЕЗНОДОРОЖНОЙ АВТОМАТИКИ И ТЕЛЕМЕХАНИКИ НА ОСНОВЕ ВОЛНОВОДНО-ОПТИЧЕСКИХ ТЕХНОЛОГИЙ
Специальность: 05.13.06 – Автоматизация и управление технологическими процессами и производствами (на транспорте)
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
кандидата технических наук
Ростов-на-Дону – 2009
Работа выполнена в государственном образовательном учреждении высшего профессионального образования «Ростовский государственный университет путей сообщения» (РГУПС)
Научный руководитель: кандидат технических наук, профессор
Долгий Игорь Давидович
Официальные оппоненты: доктор технических наук, профессор Кравцов Юрий Александрович
кандидат технических наук, профессор
Родзин Сергей Иванович
Ведущая организация: Открытое акционерное общество
«Научно-исследовательский и проектно-конструкторский институт информатизации, автоматизации и связи на железнодорожном транспорте» (ОАО «НИИАС»)
Защита состоится « 28 » декабря 2009 г. в 13.00 часов на заседании диссертационного совета Д 218.010.03 при Ростовском государственном университете путей сообщения по адресу: 344038, г. Ростов-на-Дону, пл. Ростовского Стрелкового Полка Народного Ополчения, 2, конференц-зал.
С диссертацией можно ознакомиться в библиотеке РГУПС
Автореферат разослан « 27 » ноября 2009 г.

Ученый секретарь
диссертационного совета
доктор технических наук, профессор М.А. Бутакова
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность темы исследования. Принятая Федеральная программа «Модернизация транспортной системы России на 2002 – 2010 годы» требует осуществить поэтапное повышение скоростей движения пассажирских поездов с увеличением протяженности полигона скоростного движения до 8 тыс. км. Реализация программы возможна не только за счет выбора стратегии управления процессом перевозок (УПП), но и за счет выбора технологий, которые станут основой для новых систем железнодорожной автоматики, телемеханики (СЖАТ). Основными стратегическими задачами научно-технического развития в области СЖАТ являются:
Современные системы цифровой связи.
Автоматизация функции управления движением поездов.
Качественное сокращение количества сбоев в работе автоматической локомотивной сигнализации.
Спутниковые технологии координатного управления движением поездов.
Обеспечение электромагнитной совместимости (ЭМС) технических средств.
Переход на необслуживаемые устройства с автоматической оценкой предотказного состояния.
Разработка принципиально новых систем диагностики и мониторинга объектов инфраструктуры и подвижного состава.
Расширение функций безопасности станционных систем управления и автоматизация управления на сортировочных станциях.
Автоматизация контроля состояния инфраструктуры и подвижного состава, в том числе с использованием спутниковых технологий.
В настоящее время реализуется задача по разработке и внедрению малообслуживаемых и необслуживаемых СЖАТ. При этом учитывается опыт эксплуатации систем предшествующих разработок. Особое внимание в области СЖАТ уделяется разработке и внедрению устройств, систем технической диагностики и мониторинга (СТДМ). Намеченные мероприятия направлены на своевременное выявление предотказных состояний объектов инфраструктуры, подвижного состава и снижение влияния человеческого фактора. За счет указанных мероприятий предполагается сократить количество браков и сбоев в работе железнодорожного транспорта.
Заметный вклад в развитие СЖАТ внесли известные отечественные ученые: Беляков И.В., Бочков К.А., Брылеев А.М., Гавзов Д.В., Долгий И.Д., Дмитренко И.Е., Иванченко В.Н., Казаков А.А., Кравцов Ю.А., Лисенков В.М., Пенкин Н.Ф., Поплавский А.А., Розенберг Е.Н., Сапожников В.В., Сапожников Вл. В., Соболев Ю.В., Явна А.А. и др.
Современные СТДМ включает в себя датчики (сенсоры), микропроцессорный измерительный комплекс, линии связи. Наличие помех во всем информационно-измерительном тракте приводит к необходимости разработки специализированного программного обеспечения для качественного распознавания полезной информации на фоне шумов. Поэтому для увеличения помехозащищенности в различных динамических системах в настоящее время широкое применение нашли методы линейной и нелинейной фильтрации.
Но, несмотря на бурные успехи теории стохастического управления и фильтрации за последнее тридцатилетие, создающие зачастую иллюзию ее завершенности, за рамками полного теоретического разрешения остаются еще многие вопросы управления динамическими системами в условиях неопределенности. Поэтому для улучшения качественных характеристик работы существующих систем и СЖАТ нового поколения в диссертационной работе были разработаны и предложены на основе новых информационных технологий базовые элементы СЖАТ, структуры СЖАТ и принципы их работы, исследовались методы оптимальной фильтрации информационных сигналов в СЖАТ. В целом, диссертационная работа направлена на создание автоматизированных систем контроля и управления, обеспечивающих высокий уровень безопасности движения поездов.
Цель диссертационного исследования – разработка алгоритмического обеспечения процесса идентификации подвижных единиц и параметров верхнего строения пути в задачах диагностики и мониторинга объектов инфраструктуры и подвижного состава, осуществляемых на основе применения волноводно-оптических технологий (ВОТ).
Объект исследования – системы автоматизированного управления процессом перевозок и обеспечения безопасности движения поездов.
Предмет исследования – методы и алгоритмы построения автоматизированных систем контроля и идентификации станционных технологических процессов на основе использования ВОТ.
Для достижения поставленной цели в диссертационной работе были решены следующие задачи:
1. Проведен анализ и обзор современных отечественных и зарубежных систем автоматизированного управления движением поездов, средств диагностики и мониторинга.
2. Осуществлен синтез волноводно-оптических устройств автоматизированного контроля элементов ЖАТ и параметров верхнего строения пути.
3. Разработан и предложен принципиально новый универсальный волноводно-оптический датчик (ВОД) для автоматизации процесса идентификации подвижных единиц и параметров верхнего строения пути как функциональный аналог рельсовых цепей (РЦ), спутниковой навигации (СН), путеизмерительных вагонов.
4. Разработана новая модель и синтезированы основные функциональные узлы волноводно-оптической централизации.
5. Впервые получены уравнения оценивания параметров сканирующего оптического импульса ВОД на основе применения нелинейного фильтра Калмана.
6. Разработан универсальный алгоритм параметрической идентификации параметров сканирующих импульсов ВОД, позволяющий проводить точное определение местоположения подвижных единиц и контролировать техническое состояние верхнего строения пути.
Методы исследования основываются на применении теории вероятностей, теории нелинейной фильтрации, методов параметрической идентификации. Данные методы позволяют повысить потенциальную точность идентификации за счет использования вместо традиционного среднеквадратического критерия более общих вероятностных критериев, нелинейно зависящих от плотности распределения.
В качестве инструментально-методического аппарата были использованы визуальные средства математического моделирования MATLAB 7.0.
Научная новизна диссертационной работы заключается в следующем:
1. Разработаны новые методы автоматизации процессов управления и контроля состояния устройств ЖАТ, основанные на применении адаптивных стохастических моделей и позволяющие повысить точность и оперативность получения диагностической информации.
2. Предложен новый метод автоматизации процессов контроля параметров верхнего строения пути и перемещения подвижных единиц, основанный на использовании разработанного в работе ВОД.
3. Разработан алгоритм оценивания параметров нелинейных стохастических процессов мониторинга и диагностики в условиях помех, обусловленных неидеальностью волноводно-оптического тракта передачи информации и внутренними шумами приемника.
4. Впервые решена задача параметрической идентификации сканирующих оптических импульсов универсального ВОД в условиях помех на основе предложенного в работе нелинейного вероятностного критерия.
Теоретическая и практическая значимость. Разработанные в результате диссертационного исследования универсальные базовые элементы ЖАТ, функциональные узлы и модель оптической централизации на основе ВОТ могут применяться как в действующих СЖАТ (в устройствах диагностики и мониторинга, автоматизированных системах УПП), так и при синтезе систем нового поколения. За счет применения ВОТ обеспечивается: ЭМС (в силу отсутствия влияния электромагнитных помех на распространение светового потока в оптическом волноводе), электробезопасность, высокая информативность, малое энергопотребление, охват протяженных и удаленных контролируемых объектов.
Разработанный помехоустойчивый алгоритм параметрической идентификации подвижных единиц и мониторинга состояния верхнего строения пути позволяет как с большей точностью определять местоположение подвижных единиц по сравнению с РЦ, СН, так и применять его в различных приложениях диагностики и мониторинга независимо от среды распространения сканирующих сигналов.
Это, в свою очередь, значительно расширяет область применения предложенных алгоритмов диагностики и мониторинга не только в области железнодорожного транспорта, но и в других областях техники.
Апробация работы. Основные положения и научные результаты работы докладывались и обсуждались на семинарах кафедры «Автоматика и телемеханика на железнодорожном транспорте» РГУПС; на Всероссийской научно-практической конференции «Актуальные проблемы развития технических средств железнодорожной автоматики и телемеханики», Ростов-на-Дону, 2002 г.; на Всероссийской научно-практической конференции «Транспорт 2004», г. Ростов-на-Дону, 2004 г.; на Всероссийской научно-практической конференции «Актуальные проблемы развития транспортного комплекса», г. Самара, 2009 год.
Публикации, патенты. По теме диссертации опубликовано 13 печатных работ, в том числе в изданиях, рекомендованных ВАК, опубликовано 6 печатных работ. Получено 4 патента на изобретения.
Структура и объем работы. Диссертация состоит из введения, четырех глав, заключения, списка литературы из 132 наименований и двух приложений. Общий объем работы – 154 страницы, 34 рисунка, 3 таблицы, 3 диаграммы.
КРАТКОЕ СОДЕРЖАНИЕ РАБОТЫ
Во введении обосновывается актуальность темы диссертационной работы, формулируются цели и основные задачи исследования, показана научная новизна и практическая ценность полученных результатов, указаны сведения о публикациях, приведена структура диссертационной работы.
В первой главе проводится анализ инновационных направлений научно-технического развития ОАО «РЖД». Дан обзор отечественных и зарубежных автоматизированных систем УПП, рассмотрены принципы их функционирования. Выявлен ряд проблем, определены пути их решения.
Из анализа случаев брака, допущенных в 2008 году по видам устройств, наибольшее количество приходится на РЦ. Анализ отказов РЦ свидетельствует, что 74 % из них допущено по вине работников службы пути (П), 21 % – по вине работников службы автоматики и телемеханики (Ш), 5 % – по вине работников других служб. Аналогичная ситуация по отказам устройств ЖАТ складывалась и до 2008 года. В том числе, 2,94 % отказов произошло по причине краж и порчи устройств посторонними лицами, т.е. наиболее характерными причинами отказов РЦ с прекращением их работы считаются: обрыв стыковых соединителей, перемычек, нарушение целостности изолирующего стыка, понижение сопротивления балласта, замыкание различными элементами (более половины случаев закорачивания РЦ происходит посторонними предметами (проволока, инструмент и т.д.), в том числе из-за неправильной установки заземляющих штанг работниками дистанций электроснабжения), влияние посторонних источников тока, повреждения, обусловленные попаданием грозового разряда, неправильная регулировка режима работы аппаратуры РЦ, излом рельса и другие.
Кроме неудовлетворительной работы РЦ, железнодорожный путь связан с неисправностями другого рода. Температурные колебания и просадка грунта вызывают опасные изменения в геометрии железнодорожного пути.
Частично некоторые из описанных выше проблемы решаются за счет строительства бесстыковых путей, включения тональных РЦ (ТРЦ), установки счетчики осей (СО), применения приложений систем спутниковой навигации (ССН). Однако системы наземного базирования наиболее привлекательны в силу возможности их совершенствования, технического обслуживания (ТО) и контроля железнодорожниками (в отличие от ССН).
Из вышесказанного следует, что необходимо предпринять усилия по решению проблем, связанных с РЦ и содержанием железнодорожного пути, т.е. необходимо разработать универсальное устройство для идентификации подвижных единиц и мониторинга параметров верхнего строения пути. Наибольшую эффективность от предлагаемого устройства можно достичь путем его интеграции в современную систему диспетчерской централизации (ДЦ). Базисным элементов в подобной системе должен быть универсальный датчик, решающий две задачи одновременно:
идентификация подвижных единиц на пути;
мониторинг верхнего строения пути.
Как было отмечено выше, реализация планов научно-технического развития ОАО «РЖД» связана с новыми базисными технологиями. Одной из таких технологий является динамично развивающаяся во всем мире волноводная оптика, которая применяется в различных областях науки и техники: оптические вычислительные машины, оптическая память, оптические коммутаторы, оптические и волноводно-оптические датчики (ВОД).
Во второй главе проведен синтез ВОД идентификации подвижных единиц и мониторинга верхнего строения пути. Предложены базовые элементы для СЖАТ на основе оптической информационной технологии.
ВОТ наиболее перспективны для разработки компьютеров общего назначения, а также различных комплексов передачи, обработки и хранения информации. Основные исследования оптических технологий за рубежом (в Массачусетском технологическом институте, Стэндфордском, Токийском университетах и т.д.) и в России (ИО ФАН, ИРЭ РАН, МИФИ и т.д.) проводятся по двум направлениям: синтез оптических процессоров на основе Фурье-оптики и разработка вычислительных структур на основе оптических функциональных узлов, допускающих интегральное исполнение. При этом оптические функциональные узлы допускают реализацию классических информационно-логических функций и выполняются в виде неуправляемых оптических волноводов (ОВ). Технология их исполнения (в т.ч. интегрального) в настоящее время отработана достаточно глубоко. Это дает возможность использовать интегральные ОВ и оптические функциональные узлы в проектировании автоматизированных систем УПП и прочих устройств различного назначения.
Кроме этого, ОВ нашли свое применение в качестве датчиков различных физических величин. В рамках представленной диссертационной работы был разработан базовый ВОД, предназначенный для идентификации подвижных единиц и мониторинга верхнего строения пути. Функционирование ВОД основано на оптическом нелинейном взаимодействии между ОВ, заключенными в одну оболочку.
Оптическая связь между ОВ происходит за счет обмена энергией пространственной моды излучения оптических сканирующих импульсов (ОСИ) через специальные окна связи (ОС)). Если в один из ОВ вводится мощность ![]() , пропорциональная некоторой величине
, пропорциональная некоторой величине ![]() , то мощность
, то мощность ![]() , переданная в другой ОВ, будет определяться следующим соотношением:
, переданная в другой ОВ, будет определяться следующим соотношением:
 , (1)
, (1)
где ![]() разность постоянных распространения; К коэффициент передачи мощности, зависящий от ряда факторов, в том числе от расстояния между окнами связи ОВ длиной L (рис. 1).
разность постоянных распространения; К коэффициент передачи мощности, зависящий от ряда факторов, в том числе от расстояния между окнами связи ОВ длиной L (рис. 1).
Приложенное к ВОД внешнее давление изменяет расстояние d на некотором участке длиной l (в данном случае это длина ОС (рис. 1)), следовательно, влияет на коэффициент передачи оптической мощности К. Изменяя d, можно модулировать передачу оптической мощности из одного ОВ в другой и определять давление Р по изменению ![]() , регистрируя интенсивность излучения, индуцированного во втором ОВ (рис. 2).
, регистрируя интенсивность излучения, индуцированного во втором ОВ (рис. 2).
Давление, оказываемое на ВОД, обусловлено деформацией резиновой подкладки (рис. 3), а именно: изменением формы ее рифлей вследствие давления колесной пары на рельс. Так как оптическая волноводная «косичка» укладывается в рифлях резиновых подкладок, это обеспечит передачу их механического напряжения (деформацию) телу датчика, т.е. его чувствительному элементу. При этом область контроля определена контуром укладки ВОД длиной L под рельсами железнодорожного пути.

Рис. 1. Структура тела ВОД
В качестве ОСИ приняты оптические солитоны, которые представляют собой волны (или волновые пакеты) специальной формы. Возбуждение обозначенных волн осуществляется лазерным источником света в ОВ при совместном действии дисперсионных и нелинейных эффектов в области аномальной (отрицательной) дисперсии.
Передатчики ОСИ формируют солитонные импульсы, распространяющиеся на встречу друг другу в ОВ датчика. При столкновении в заданной точке (ОС) и ее проследовании суммарная интенсивность возникшего единичного импульса возрастет. В простейшем случае это выражается следующим образом:
![]() , (2)
, (2)
где А амплитуда светового импульса.
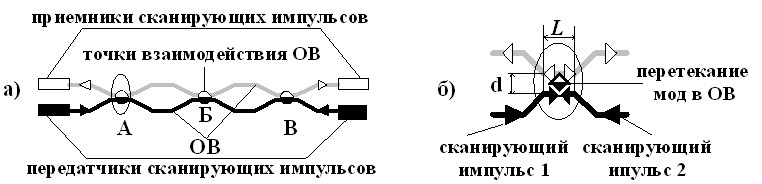
Рис. 2. Принцип оптического сканирования в оптически связанных волноводах

Рис. 3. Передача деформаций резиновой подкладки ВОД
Развитие наземных СТДМ объектов инфраструктуры и СЖАТ на основе оптических, волноводно-оптических технологий позволит перейти к новому техническому уровню с последующей реализацией актуальных задач: разработка автоматизированной системы интервального регулирования движением поездов на единой платформе (оптической, волноводно-оптической), разработка и внедрение ВОД различного назначения. ВОД обеспечивают: ЭМС на электрифицированных участках, высокий уровень электробезопасности, достоверность и информативность. Это подтверждает актуальность проводимых исследований и перспективность ВОТ в области безопасного автоматизированного УПП на железнодорожном транспорте.
В третьей главе проведен детальный анализ факторов, влияющих на работу ВОД (проведен анализ шумов в приемном устройстве и ОВ). Исследованы проблемы применения существующих методов параметрической идентификации для обнаружения подвижных единиц и мониторинга верхнего строения железнодорожного полотна.
Разработан метод параметрической идентификации параметров ОСИ ВОД. Проведено компьютерное моделирование на основе предварительно определенной теоретической базы. Результаты моделирования представлены в графиках.
Как известно, при распространении оптического сигнала по ОВ сигнал не только затухает, но и искажается за счет естественной дисперсии. Дисперсия реальных ОВ отличается от теоретической модели дисперсии объемной среды наличием волноводной структуры, изменяющей эффективный показатель преломления моды. В результате появляется особая волноводная составляющая дисперсии, которая складывается определенным образом с дисперсией материала, формируя результирующую дисперсию. Для описания дисперсии в ОВ с учетом ее волноводной составляющей используют следующее выражение:
![]() , (3)
, (3)
где ![]() дисперсия групповых скоростей.
дисперсия групповых скоростей.
Приведенные в диссертационной работе расчетные соотношения, включая выражение (3), позволяют определить, по существу, математическое ожидание общей дисперсии ОСИ путем их суммирования (в предположении статистической независимости всех вышеуказанных типов дисперсий). Для более точной оценки параметров ОСИ необходимо учитывать случайный характер рассеивания излучения в ОВ и считать фазу, амплитуду ОСИ случайными. При этом в силу центральной предельной теоремы случайные процессы флюктуаций, как фазы импульса, так и его амплитуды, могут быть описаны гауссовскими случайными процессами, как в пространстве ОВ (ограниченного его внешними стенками), так и во времени.
Помимо перечисленных выше помех, создающих искажения ОСИ, в работе ВОД будут возникать погрешности, обусловленные неидеальностью схемы, шумами фотодиода, шумами источника света, внешними электромагнитными полями и т.д. В общем случае считается, что работа ВОД будет ограничена тепловыми шумами полупроводникового фотодетектора источниками гауссовских случайных переменных.
Из вышесказанного понятно, что шум ВОД имеет довольно широкий спектр гауссовых компонентов, который далее будем считать как обобщенную помеховую гауссовскую составляющую в процессе приема и обработки сигнала ВОД.
На рисунке 4 показана эволюция ОСИ и его неэнергетических параметров (мода, дисперсия), которые требуется оценить для определения местоположения подвижных единиц и изменения профиля пути.

Рис. 4. Эволюция сканирующего оптического импульса и его
неэнергетических параметров
Оценка параметров ![]() и
и ![]() позволит определить точное время прибытия ОСИ и выделить полезный сигнал на фоне помеховой гауссовской составляющей. Разработанное алгоритмическое обеспечение вычисляет расстояние
позволит определить точное время прибытия ОСИ и выделить полезный сигнал на фоне помеховой гауссовской составляющей. Разработанное алгоритмическое обеспечение вычисляет расстояние ![]() до точки возмущения (в нашем случае – точка, в которой произошел переход (пробой) ОСИ из одного ОВ в другой).
до точки возмущения (в нашем случае – точка, в которой произошел переход (пробой) ОСИ из одного ОВ в другой).
Для синтеза уравнений оценки параметров ОСИ рассмотрим предварительно уравнения, описывающие динамику изменения основных параметров ОСИ: моду m(t) и дисперсию ![]() .
.
Рассматривая самый общий случай прохождения солитонного ОСИ по волноводно-оптическому тракту, т.е. с учетом случайных флюктуаций Сn, принимаемых далее за центрированный белый гауссовский шум с известной интенсивностью Dm и обозначаемых как Wm, имеем более общее уравнение для моды m(t) стохастическое в форме Ланжевена:
![]() + Wm. (4)
+ Wm. (4)
Результат моделирования (скорости изменения моды) эволюции моды m(t) по выражению (4) показан на рисунке 5. Моделирование проведено методом Рунге Кутты на временном интервале ![]() .
.

Рис. 5 Моделирование скорости изменения моды m(t) ОСИ
Для дисперсии солитонного оптического импульса с учетом ее постоянного роста во времени с известным детерминированным коэффициентом сноса b и неизбежных случайных флюктуаций, принимаемых аналогично вышеизложенному за центрированный белый гауссовский шум с известной интенсивностью D![]() и обозначаемых как W
и обозначаемых как W![]() , имеем следующее стохастическое уравнение в форме Ланжевена:
, имеем следующее стохастическое уравнение в форме Ланжевена:
![]() + W
+ W![]() . (5)
. (5)
Результат моделирования эволюции дисперсии ![]() солитонного оптического импульса по выражению (5) показан на рисунке 6.
солитонного оптического импульса по выражению (5) показан на рисунке 6.
Полученные уравнения (4), (5) при известном параметре x (т.е. заранее заданное расстояние) уже позволяют решить задачу оптимального статистического приема ОСИ в условиях помех, используя основные положения теории нелинейной фильтрации. Но в исследуемом случае задача рассматривается шире. Требуется осуществить идентификацию параметра ![]() . Для решения задачи в подобной постановке требуется модификация уравнений (4) и (5).
. Для решения задачи в подобной постановке требуется модификация уравнений (4) и (5).

Рис. 6. Моделирование эволюции дисперсии ![]() ОСИ
ОСИ
Результат проводимой модификации заключается в системе трех стохастических уравнений в форме Ланжевена, описывающих параметры ОСИ:
![]() + Wm;
+ Wm; ![]() + W
+ W![]() ;
; ![]()
![]() =
=![]() b (6)
b (6)
где ![]() новый искомый, идентифицируемый далее параметр.
новый искомый, идентифицируемый далее параметр.
Опираясь на тот факт, что наибольшую общность и эффективность различным процедурам стохастической оптимизации обеспечивает использование апостериорной плотности вероятностей (АПВ) в критериях оптимальности, рассмотрим далее метод параметрической идентификации, позволяющий принципиально повысить потенциальную точность идентификации за счет использования вместо традиционного среднеквадратического критерия более общих вероятностных критериев, нелинейно зависящих от плотности распределения и обеспечивающих достижение потенциально большей точности.
Задачу при этом сформулируем следующим образом.
Пусть стохастический динамический объект, наблюдаемый зашумлённым нелинейным измерителем
![]() ,
,
где ![]() наблюдаемый вектор состояния;
наблюдаемый вектор состояния;
![]() – известная нелинейная вектор-функция наблюдения;
– известная нелинейная вектор-функция наблюдения;
![]() – центрированный белый гауссовский вектор-шум с матрицей интенсивности
– центрированный белый гауссовский вектор-шум с матрицей интенсивности ![]() ,
,
описывается векторным дифференциальным уравнением
![]() ,
,
где ![]() – вектор-функция с параметрической неопределeнностью;
– вектор-функция с параметрической неопределeнностью;
![]() – центрированный белый гауссовский вектор-шум с матрицей интенсивности
– центрированный белый гауссовский вектор-шум с матрицей интенсивности ![]() .
.
В общем случае вектор ![]() можно представить в виде:
можно представить в виде:
![]() ,
,
где ![]() – известная нелинейная функция-матрица,
– известная нелинейная функция-матрица,
![]() – искомый вектор неизвестных параметров.
– искомый вектор неизвестных параметров.
При этом уравнение объекта запишется как:
![]() . (7)
. (7)
Для решения задачи идентификации необходимо, чтобы искомый вектор ![]() доставлял оптимум некоторому заданному обобщенному вероятностному функционалу
доставлял оптимум некоторому заданному обобщенному вероятностному функционалу ![]() , зависящему от апостериорной плотности вероятности
, зависящему от апостериорной плотности вероятности ![]() процесса
процесса ![]() , причем, в общем случае нелинейно. Оптимизируемый обобщенный вероятностный функционал
, причем, в общем случае нелинейно. Оптимизируемый обобщенный вероятностный функционал ![]() , нелинейно зависящий от апостериорной плотности вероятности
, нелинейно зависящий от апостериорной плотности вероятности ![]() процесса
процесса ![]() , можно представить в виде:
, можно представить в виде:
 . (8)
. (8)
Формирование АПВ на основе решения данного уравнения в многомерном случае представляет собой непростую вычислительную задачу, поэтому используем далее гауссовскую аппроксимацию ![]() , позволяющую свести задачу построения АПВ к интегрированию систем обыкновенных дифференциальных уравнений ее параметров: вектор апостериорного математического ожидания –
, позволяющую свести задачу построения АПВ к интегрированию систем обыкновенных дифференциальных уравнений ее параметров: вектор апостериорного математического ожидания – ![]() и апостериорная ковариационная матрица –
и апостериорная ковариационная матрица – ![]() .
.
Дальнейшее решение задачи предполагает операции с вектором параметров АПВ ![]() и матричным уравнением
и матричным уравнением ![]() , используя при этом леммы из Приложения 2 и преобразует уравнения параметров
, используя при этом леммы из Приложения 2 и преобразует уравнения параметров ![]() к единой векторной форме. Полученные при этом уравнения позволяют записать для плотности
к единой векторной форме. Полученные при этом уравнения позволяют записать для плотности ![]() его расширенный вектор параметров
его расширенный вектор параметров ![]() и его зависимость от искомого вектора в следующей простой форме:
и его зависимость от искомого вектора в следующей простой форме:
 (9)
(9)
Исходя из изложенного, задачу параметрической идентификации окончательно сформулируем как задачу поиска вектора, обеспечивающего оптимум функционала ![]() (8) при условии, что вектор параметров
(8) при условии, что вектор параметров ![]() плотности
плотности ![]() , аппроксимирующей функцию АПВ вектора состояния
, аппроксимирующей функцию АПВ вектора состояния ![]() , описывается уравнением (9). Используя то, что при неотрицательно определенной критериальной функции для обеспечения ее минимального значения в каждый момент времени достаточно, чтобы производная ее по времени, взятая с обратным знаком, имела максимум, получаем условие для определения искомого вектора параметров:
, описывается уравнением (9). Используя то, что при неотрицательно определенной критериальной функции для обеспечения ее минимального значения в каждый момент времени достаточно, чтобы производная ее по времени, взятая с обратным знаком, имела максимум, получаем условие для определения искомого вектора параметров:
 . (10)
. (10)
Подставляя в (10) выражение для правой части уравнения (9), имеем следующее уравнение относительно :
 .
.
Из последнего вытекает окончательное уравнение для определения искомого вектора :
![]() (11)
(11)
решение которого осуществляется, исходя из конкретного вида функции Ф2. Так, например, для предложенной в работе квадратичной формы функции Ф2() уравнение (11) принимает вид:
![]()
откуда
 (12)
(12)
Выражение (12) позволяет легко учесть возможные в общем случае ограничения на вектор (например, =max) при известных текущих значениях гауссовской функции ![]() , формируемых на основе решения уравнений (9) после подстановки в них выражения (12):
, формируемых на основе решения уравнений (9) после подстановки в них выражения (12):
![]() (13)
(13)
Анализ данного уравнения позволяет сделать следующие выводы, свидетельствующие о преимуществах предложенного метода перед традиционными. Во-первых, рассмотренная процедура идентификации оказывается инвариантной к размерности вектора неизвестных параметров – размерность уравнения (13) сохранилась равной размерности исходной системы оценки вектора состояния (9), и сокращает размерность интегрируемой системы на  по сравнению с традиционной. Во-вторых, отсутствие допущений о неизменности неизвестных параметров на интервале оценивания позволяет их идентифицировать с большей точностью.
по сравнению с традиционной. Во-вторых, отсутствие допущений о неизменности неизвестных параметров на интервале оценивания позволяет их идентифицировать с большей точностью.
Более того, в силу достаточно простой структуры уравнения (13) – аналогичной, по существу, (9), и возможности быстродействующего вычисления определенного интеграла в его правой части (ядро которого известно) с помощью существующих эффективных численных методов, очевидно, что описанный метод идентификации может быть легко реализован в реальном масштабе времени поступления измерительной информации.
На основе предложенной процедуры идентификации было проведено компьютерное моделирование оценки моды и дисперсии с графическим представлением информации (рис. 7, 8). При этом оценка моды и дисперсии проводилась как с использованием оптимального алгоритма адаптации, так и без него.

Рис. 7. Текущая оценка моды с использованием алгоритма адаптации и без него

Рис. 8. Текущая оценка дисперсии с использованием алгоритма
адаптации и без него
Представленные графики отражают в конечном итоге степень точности определения координат точек возмущения на заданном участке наблюдения (в нашем случае длина участка наблюдения составляет 200 м, время сканирования ![]() ).
).
В четвертой главе разработаны функциональные схемы устройств контроля и диагностики элементов ЖАТ на основе оптических и ВОТ. Разработана и предложена на структурном уровне многофункциональное волноводно-оптическое устройство (ВОУ) идентификации подвижного состава. Разработана и предложена действующая реальная модель волноводно-оптического светофора. Предложен новый ВОД идентификации подвижных единиц и параметров верхнего строения пути. Определен источник генерации лазерных сканирующих импульсов для ВОД, даны сравнительные характеристики промышленных образцов источников лазерного излучения. Приведена оценка и определена возможность нетрадиционного применения светоизлучающего диода АЛ307 в качестве фотоприемника фемтосекундных импульсов. Разработаны структура оптической централизации и периферийные устройства на основе ВОТ.
С учетом обоснованной универсальности оптических и ВОТ проведем синтез устройств для мониторинга и диагностики элементов ЖАТ на основе ВОТ. На рисунке 9 представлена функциональная схема ВОД контроля положения остряков стрелочного перевода. Основой данного ВОД является одиночный ОВ, работающий на изгиб.
В качестве источника излучения используется одномодовый лазер, генерирующий критическую длину волны ![]() , которая определяется диаметром сердцевины ОВ. Световой поток
, которая определяется диаметром сердцевины ОВ. Световой поток ![]() распространяется в ОВ на граничных условиях, которые контролирует схема сравнения. При переводе остряка стрелочного перевода происходит изгиб ОВ. Это, в свою очередь, приводит к потерям светового потока внутри ОВ. Данное событие фиксируется как перевод остряка в то или иное положение.
распространяется в ОВ на граничных условиях, которые контролирует схема сравнения. При переводе остряка стрелочного перевода происходит изгиб ОВ. Это, в свою очередь, приводит к потерям светового потока внутри ОВ. Данное событие фиксируется как перевод остряка в то или иное положение.

Рис. 9. Функциональная схема стрелочного ВОД
Его работа базируется на методе оптической временной рефлектометрии, который аналогичен методу временного мультиплексирования. Работа этого метода заключается во вводе СОИ в ОВ и регистрации мощности рассеянного обратного излучения. Полученная временная зависимость преобразовывается в координаты точек возмущения по длине ОВ. Таким способом можно измерять распределение различных деформационных величин, так как они оказывают влияние на характер обратного рассеяния излучения в ОВ. При этом распределенный ВОД способен контролировать протяженные объекты (земляные пласты, мосты, здания, железнодорожные пути и т.д.) и фиксировать в зависимости от его назначения:
температуру;
давление;
вибрацию;
наличие дугового разряда (контроль кабельных каналов);
электрические, магнитные поля и т. д.
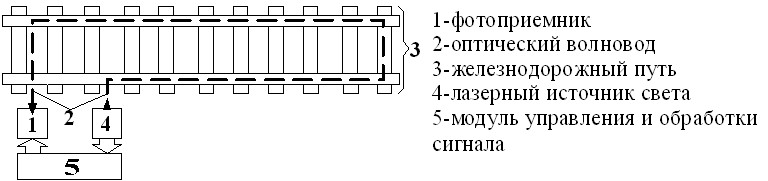
Рис. 10. Расположение распределенного волноводно-оптического датчика
Представленная функциональная схема ВОД работает на одном ОВ и предназначена для контроля состояния железнодорожного перегона, станционных путей, прицельного торможения скатывающихся вагонов при их роспуске на сортировочной горке. На сегодня последняя задача решается радиолокационными датчиками, индуктивными шлейфами, СО.
В рамках настоящей диссертационной работы была разработана реальная действующая модель волноводно-оптического светофора (ВОС). Цель разработки заключалась в следующем: максимально уменьшить количество высотных работ при обслуживании напольных светофоров (так как все оборудование размещается внизу за счет применения ОВ и светодиодного источника излучения), обеспечить электробезопасность для обслуживающего персонала, обеспечить высокую надежность элементов напольных светофоров, создать малообслуживаемый напольный светофор. Реализовать поставленные задачи представляется возможным за счет применения ОВ и современных прочных материалов. Первое обеспечит пропуск излучения от светового модуля, который может быть размещен в специальном вандалостойком корпусе у основания мачты светофора. Второе обеспечит высокие механические и оптические свойства (прочность, прозрачность). Таким образом, был разработан прототип напольного светофора нового поколения. Его функциональная схема представлена на рисунке 11.
ВОС был разработан совместно с Ростовским заводом космического приборостроения «Квант» и прошел предварительную проверку на осевую сислу света в Армавирском электромеханическом заводе при непосредственном участии соискателя.

Рис. 11. Функциональная схема волноводно-оптического светофора
Описанные выше ВОУ обеспечат пропуск и управление высокоскоростным железнодорожным транспортом. Придерживаясь идеи создания автоматизированной системы УПП на единой платформе в едином информационном пространстве, была разработана функциональная схема станционной оптической централизации (СОЦ) (рис. 12).

Рис. 12. Функциональная схема станционной оптической централизации
Ядром ОЦ является оптический управляющий модуль (МОУ), соединенный с множеством объектов управления и контроля через разветвленную сеть ОВ. По замыслу соискателя связь МОУ с устройствами контроля осуществляется через оптически управляемые транспаранты, способные считывать большой массив информации за один оптический тактовый импульс. Представленные на рисунке 12 ВОУ в большинстве своем описаны в данной диссертационной работе на уровне функциональных схем и принципа их работы с математическим описанием. Контроль объектов ЖАТ на станции происходит благодаря множеству ВОД. Каждый датчик накачивается световым потоком, который генерируется и контролируется в МОУ. По сути, станционная оптическая централизация является субмодулем внутри единой автоматизированной системы УПП.
ОСНОВНЫЕ РЕЗУЛЬТАТЫ РАБОТЫ
1. На основе анализа практических проблем, связанных с контролем и управлением объектами железнодорожной автоматики и телемеханики, было предложено решение на основе новой волноводно-оптической технологии.
2. Разработаны структурные, функциональные и принципиальные схемы элементов логики, памяти и тактового генератора оптического датчика, являющиеся базовыми элементами волноводно-оптической технологии.
3. На основе предложенной волноводно-оптической технологии разработаны алгоритмы идентификации подвижных единиц и мониторинга верхнего строения пути, допускающие реализацию в режиме реального времени.
4. При участии соискателя предложена функциональная схема станционной оптической централизации, для которой разработана и испытана реально действующая модель волноводно-оптического светофора.
ОСНОВНЫЕ ПУБЛИКАЦИИ ПО ТЕМЕ ДИССЕРТАЦИИ
1. Прокопенко, С.А. Волноводно-оптический датчик мониторинга пути / С.А. Прокопенко // Путь и путевое хозяйство, 2007. – № 5.– С. 25–26.
2. Долгий, И.Д. Системы координатного регулирования движения поездов на основе оптических технологий / И.Д. Долгий, С.А. Прокопенко // Автоматика, связь, информатика, 2004. – № 7.– С. 20–21.
3. Прокопенко, С.А. Решение проблем диагностики / С.А. Прокопенко, А.А. Алексеев // Автоматика, связь, информатика, 2006. – № 4.– С. 36 – 38.
4. Прокопенко, С.А. Дорожный центр управления перевозками / С.А. Прокопенко, С.А. Куделин // Автоматика, связь, информатика, 2005. – № 1.– С. 25–29.
5. Прокопенко, С.А. Распределенный контролируемый пункт ДЦ-ЮГ / С.А. Прокопенко, С.А. Куделин // Автоматика, связь, информатика. 2005. – № 10. – С. 18 – 19.
6. Прокопенко, С.А. Передача сигналов телеуправления и телесигнализации системы «ДЦ-ЮГ с РКП» по волоконно-оптической линии связи / С.А. Прокопенко // Междунар. межвуз. сб. науч. тр. «Актуальные проблемы развития технических средств железнодорожной автоматики и телемеханики». – Ростов н/Д, 2002. – С. 42–46.
7. Долгий, И.Д. Тезисы для научно-технической конференции «Оптические системы регулирования движением поездов» / И.Д. Долгий, С.А. Прокопенко // Тр. всероссийской науч.-практ. конференции «Транспорт – 2004». Ч. 1. – Ростов н/Д, 2004. – С. 3.
8. Прокопенко, С.А. Волоконно-оптический датчик (контроль положения остряка стрелки) / С.А. Прокопенко // Междунар. межвуз. сб. науч. тр. «Актуальные проблемы развития технических средств технологий железнодорожной автоматики и телемеханики». – Ростов н/Д: РГУПС, 2003. – С. 136–141.
9. Прокопенко, С.А. Перспективные датчики на основе волоконной оптики для устройств железнодорожной автоматики и телемеханики / С.А. Прокопенко // Труды Ростовского государственного университета путей сообщения. – Ростов н/Д: РГУПС, 2005. – С. 117 – 120.
10. Прокопенко, С.А. Применение волноводно-оптических технологий в сканировании ж.-д. пути / С.А. Прокопенко // Материалы V Всероссийской науч.-практ. конференции «Актуальные проблемы развития транспортного комплекса». – Самара: СамГУПС, 2009. – С. 162 – 164.
11. Прокопенко, С.А. Синтез волноводно-оптического датчика как альтернативное решение для замены существующих рельсовых цепей / С.А. Прокопенко // Материалы V Всероссийской науч.-практ. конференции «Актуальные проблемы развития транспортного комплекса». – Самара: СамГУПС, 2009. – С. 138 – 140.
12. Пат. РФ № 2310897. Оптическое вычитающее устройство /И.Д. Долгий, С.В. Соколов, С.А. Прокопенко, В.В. Каменский. – Опубл. 2007, Бюл. № 32.
13. Пат. РФ № 2346839. Волноводно-оптический датчик мониторинга железнодорожного пути / И.Д. Долгий, С.В. Соколов, С.А. Прокопенко, В.В. Каменский. – Опубл. 2009, Бюл. № 5.
14. Пат. РФ № 2361251. Оптический аналого-цифровой преобразователь / В.В. Каменский, С.В. Соколов, С.А. Прокопенко. – Опубл. 2009, Бюл. № 19.
15. Пат. РФ № 84606. Волноводно-оптический светофор / С.А. Прокопенко, В.В. Каменский. – Опубл. 2009, Бюл. № 7.
Прокопенко Сергей Анатольевич
АВТОМАТИЗАЦИЯ ПРОЦЕССОВ КОНТРОЛЯ И ДИАГНОСТИКИ В СИСТЕМАХ ЖЕЛЕЗНОДОРОЖНОЙ АВТОМАТИКИ И ТЕЛЕМЕХАНИКИ НА ОСНОВЕ ВОЛНОВОДНО-ОПТИЧЕСКИХ ТЕХНОЛОГИЙ
Специальность: 05.13.06 – Автоматизация и управление
технологическими процессами и производствами (на транспорте)
Автореферат диссертации на соискание ученой степени
кандидата технических наук
Подписано к печати 23.11.2009 г. Формат бумаги 60x84/16.
Бумага офсетная. Ризография. Усл. печ. л. 1,0.
Тираж 100. Заказ №
Ростовский государственный университет путей сообщения.
Ризография РГУПС.
344038, г. Ростов-на-Дону, пл. Ростовского Стрелкового Полка Народного Ополчения, 2.