

Совершенствование позиционных электроприводов повышенной точности
На правах рукописи
Прохоренко Дмитрий Сергеевич
![]()
СОВЕРШЕНСТВОВАНИЕ ПОЗИЦИОННЫХ ЭЛЕКТРОПРИВОДОВ ПОВЫШЕННОЙ ТОЧНОСТИ
Специальность: 05.09.03 – Электротехнические комплексы и системы
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
кандидата технических наук
Краснодар – 2011
Работа выполнена в ФГБОУ ВПО
Кубанском государственном технологическом университете
Научный руководитель: кандидат технических наук, профессор
Добробаба Юрий Петрович
Официальные оппоненты: доктор технических наук, профессор
Богдан Александр Владимирович;
кандидат технических наук, профессор
Сингаевский Николай Алексеевич
Ведущая организация: Филиал Военного учебно-научного центра
Военно-Воздушных Сил «Военно-воздушная
академия им. Н.Е. Жуковского и
Ю.А. Гагарина» (г. Краснодар)
Защита состоится 4 октября 2011 года в 16-00 на заседании диссертационного совета Д 212.100.06 в ФГБОУ ВПО «Кубанский государственный технологический университет» по адресу: 350020, г. Краснодар, ул. Старокубанская, 88/4, ауд. №410
C диссертацией можно ознакомиться в библиотеке ФГБОУ ВПО «Кубанский государственный технологический университет» по адресу: 350072, г. Краснодар, ул. Московская, 2
Автореферат разослан «2» сентября 2011 г.
Ученый секретарь
диссертационного совета Д 212.100.06,

кандидат технических наук, доцент Л.Е. Копелевич
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность. Программно-управляемые позиционные электроприводы (ЭП) состоят из задатчиков интенсивности (командоаппаратов), формирующих диаграммы движения исполнительных органов (ИО) промышленных механизмов, и системы автоматического регулирования (САР) угловой скорости, отрабатывающей эти диаграммы движения.
В большинстве отраслей промышленности в настоящее время требуется непрерывное увеличение точности позиционирования в пространстве и производительности ЭП промышленных роботов, рабочих машин и агрегатов.
Серийно выпускаемые ЭП для промышленных механизмов обладают такими статическими и динамическими характеристиками, которые уже не позволяют обеспечить дальнейшее повышение эффективности технологических процессов в установках за счет повышения быстродействия перемещения и точности позиционирования их ИО. Поэтому разработка программно-управляемых позиционных ЭП промышленных механизмов с повышенной точностью является весьма актуальной.
Целью работы является интенсификация перемещения (поворота) ИО промышленных механизмов, с обеспечением повышенной точности их позиционирования.
Для достижения поставленной цели требуется решить следующие задачи:
– разработать оптимальные по быстродействию диаграммы перемещения ИО ЭП;
– разработать командоаппараты, формирующие оптимальные по быстродействию диаграммы перемещения ИО ЭП;
– синтезировать двухкратноинтегрирующие САР положения ИО ЭП, отрабатывающих оптимальные по быстродействию диаграммы перемещения ИО ЭП с повышенной точностью;
– экспериментально проверить полученные теоретические закономерности.
Методы и средства выполнения исследований. Для решения поставленных в диссертационной работе задач использованы общепринятые методы теории автоматического управления, автоматизированного электропривода, аналитического и численного решений дифференциальных уравнений. В основу экспериментальных исследований положена методика исследования ЭП промышленных установок и методика испытаний микропроцессорного устройства. При проведении исследований использованы пакеты прикладных программ MATLAB, Mathcad, Excel.
Объект исследования: ЭП постоянного тока независимого возбуждения.
Предмет исследования: Математическая модель ЭП постоянного тока независимого возбуждения с учётом влияния индуктивности якорной цепи электродвигателя (ЭД).
В соответствии с поставленной целью в диссертационной работе получены новые научные результаты:
– методика формирования оптимальных по быстродействию диаграмм перемещения ИО ЭП;
– математическое обеспечение командоаппаратов, формирующих оптимальные по быстродействию диаграммы перемещения ИО ЭП;
– методика синтеза двухкратноинтегрирующих САР положения ИО ЭП, отрабатывающих оптимальные по быстродействию диаграммы перемещения ИО ЭП с повышенной точностью.
Практическая ценность работы определяется тем, что использование полученных результатов теоретических и экспериментальных исследований позволяет улучшить характеристики программно-управляемых позиционных ЭП, как следствие, повысить быстродействие перемещения и точность позиционирования ИО промышленных механизмов.
Результаты диссертационной работы: методика формирования оптимальных по быстродействию диаграмм перемещения ИО ЭП; математическое обеспечение командоаппаратов, формирующих оптимальные по быстродействию диаграммы перемещения ИО ЭП; методика синтеза двухкратноинтегрирующих САР положения ИО ЭП, отрабатывающих оптимальные по быстродействию диаграммы перемещения ИО ЭП с повышенной точностью, приняты к использованию при модернизации ЭП промышленных роботов на ООО «ЮгЭнергоПроект-Кубань».
На двукратноинтегрирующую САР положения ИО ЭП с улучшенными характеристиками получен патент РФ на изобретение № 2401501. На устройство для формирования диаграмм перемещения ИО механизма, упруго соединенного с ЭД, с ограничением скорости и её первой, второй, третьей и четвертой производных скорости получен патент РФ на полезную модель №55230. На командоаппарат, формирующий оптимальную по быстродействию диаграмму перемещения ИО ЭП при ограничении по напряжению получен патент РФ на полезную модель №69354. На командоаппарат, формирующий оптимальную по быстродействию диаграмму перемещения ИО ЭП при ограничениях по напряжению, максимальному и минимальному значениям тока и скорости получен патент РФ на полезную модель №101286.
Разработан, реализован и экспериментально исследован командоаппарат на базе программируемого РС-совместимого контроллера «ADAM-5510M-A1», формирующий оптимальные по быстродействию диаграммы перемещения ИО ЭП.
К защите представляются следующие основные положения:
- Методика формирования оптимальных по быстродействию диаграмм перемещения ИО ЭП. Четыре оптимальные по быстродействию диаграммы перемещения ИО ЭП, каждая из которых имеет три вида.
- Математическое обеспечение командоаппаратов, формирующих оптимальные по быстродействию диаграммы перемещения ИО ЭП. Три командоаппарата, формирующие оптимальные по быстродействию диаграммы перемещения ИО ЭП.
- Методика синтеза двухкратноинтегрирующих САР положения ИО ЭП, отрабатывающих оптимальные по быстродействию диаграммы перемещения ИО ЭП с повышенной точностью. Три двухкратноинтегрирующие САР положения ИО ЭП, отрабатывающие оптимальные по быстродействию диаграммы перемещения ИО ЭП с повышенной точностью.
Апробация работы. Основные положения диссертационной работы доложены и обсуждены: на научных семинарах кафедры электроснабжения промышленных предприятий КубГТУ (2003-2011 гг.); на VIII региональной научно-практической конференции молодых учёных «Научное обеспечение агропромышленного комплекса» (Краснодар, 2006 г.); на международных научно-практических конференциях «Электроэнергетические комплексы и системы» (Краснодар, 2004-2007 гг.); на международной научной конференции «Технические и технологические системы» (Краснодар 2009 и 2010 г.г.).
Публикации. По результатам выполненных исследований опубликованы: 6 статей, из них 1 статья в журнале рекомендованном ВАК; 9 материалов конференций; получены: 1 патент РФ на изобретение; 3 патента РФ на полезные модели.
Структура работы. Диссертационная работа состоит из введения, пяти глав, заключения, списка литературы и 8 приложений. Основная часть работы изложена на 175 страницах, включая 43 рисунка, 1 таблицу. Список литературы содержит 165 наименований.
Первая глава диссертационной работы посвящена обзору отечественной и зарубежной литературы, постановке задач исследований.
Известны типовые оптимальные по быстродействию диаграммы перемещения ИО ЭП без учета влияния индуктивности якорной цепи ЭД. В диссертационной работе показано, что влияние индуктивности якорной цепи ЭД на динамику ЭП при его перемещении в соответствии с типовыми оптимальными по быстродействию диаграммами приводит к увеличению цикла перемещения ЭП.
Выполнен анализ задатчиков интенсивности (командоаппартов), формирующих типовые оптимальные по быстродействию диаграммы перемещения ИО ЭП.
В работе показано, что серийно выпускаемая однократноинтегрирующая САР положения имеет следующие недостатки: статические ошибки и низкое быстродействие контуров скорости и положения.
Вторая глава диссертационной работы посвящена разработке оптимальных по быстродействию диаграмм перемещения ИО ЭП с учётом влияния индуктивности якорной цепи ЭД.
Позиционный ЭП с постоянным по значению моментом сопротивления и учётом влияния индуктивности якорной цепи ЭД представлен одномассовой электромеханической системой.
Разработаны четыре оптимальные по быстродействию диаграммы перемещения ИО ЭП с постоянным по значению моментом сопротивления и учётом влияния индуктивности якорной цепи ЭД: при ограничении по напряжению; при ограничениях по напряжению и максимальному току; при ограничениях по напряжению, максимальному и минимальному токам; при ограничениях по напряжению, максимальному и минимальному токам и скорости. Каждая из диаграмм имеет по три вида, так как характеристическое уравнение системы имеет три варианта расположения корней в комплексной плоскости.
Разработано математическое обеспечение, позволяющее определить длительности этапов для четырёх оптимальных по быстродействию диаграмм (каждая диаграмма имеет три вида) перемещения ИО ЭП с постоянным по величине моментом сопротивления.
Определены условия, при выполнении которых существует каждая из четырех оптимальных по быстродействию диаграмм перемещения ИО ЭП с постоянным по значению моментом сопротивления.
Для примера на рисунке 1 представлена оптимальная по быстродействию первого вида диаграмма (справедлива при выполнении условия ![]() >
>![]() , при этом характеристическое уравнение системы имеет один нулевой и два действительных неравных корня) перемещения ИО ЭП с учётом влияния индуктивности якорной цепи ЭД при ограничениях по напряжению, максимальному и минимальному токам и скорости, где
, при этом характеристическое уравнение системы имеет один нулевой и два действительных неравных корня) перемещения ИО ЭП с учётом влияния индуктивности якорной цепи ЭД при ограничениях по напряжению, максимальному и минимальному токам и скорости, где ![]() – напряжение, приложенное к якорной цепи ЭД, В;
– напряжение, приложенное к якорной цепи ЭД, В; ![]() – угловая скорость ИО ЭП, рад/с;
– угловая скорость ИО ЭП, рад/с; ![]() – ток якорной цепи ЭД, А;
– ток якорной цепи ЭД, А; ![]() – угол поворота ИО ЭП, рад.
– угол поворота ИО ЭП, рад.

Рисунок 1 – Оптимальная по быстродействию первого вида диаграмма перемещения ИО ЭП при ограничениях по напряжению, максимальному и минимальному токам и скорости с постоянным по значению моментом сопротивления. Зависимости: угла поворота, скорости, тока и напряжения от времени
Третья глава диссертационной работы посвящена разработке командоаппаратов, формирующих оптимальные по быстродействию диаграммы перемещения ИО ЭП промышленных механизмов с учетом влияния индуктивности якорной цепи ЭД.
При участии автора разработаны три командоаппарата, формирующих оптимальные по быстродействию диаграммы перемещения ИО ЭП с моментом сопротивления типа сухого трения: при ограничении по напряжению; при ограничениях по напряжению, максимальному и минимальному токам; при ограничениях по напряжению, максимальному, минимальному токам и скорости.
Цифровое моделирование командоаппаратов, формирующих оптимальные по быстродействию диаграммы перемещения ИО ЭП с моментом сопротивления типа сухого трения при ограничениях по напряжению; по напряжению и току; по напряжению, току и скорости позволило проверить их работоспособность.
На основе математического обеспечения (аналитических зависимостей координат ЭП от времени при их оптимальном по быстродействию движении) разработано программное обеспечение программируемых РС-совместимых контроллеров ADAM-5510M-A1 на языке программирования С.
Четвёртая глава диссертационной работы посвящена синтезу трёх двукратноинтегрирующих САР положения ИО ЭП: с типовыми регуляторами; модернизированная; с улучшенными характеристиками.
За счёт введения в однократноинтегрирующую САР положения ИО ЭП пропорционально-интегрального регулятора скорости и фильтра контура скорости получена двукратноинтегрирующая САР положения ИО ЭП с типовыми регуляторами, которая имеет следующие приимущества по сравнению с серийно выпускаемой однократноинтегрирующей САР положения ИО ЭП: устранена статическая ошибка контура скорости; устранена статическая ошибка контура положения.
Однако, двукратноинтегрирующая САР положения ИО ЭП с типовыми регуляторами имеет следующие недостатки: низкое быстродействие контура скорости (постоянная времени второго контура равна ![]() ); низкое быстродействие контура положения (постоянная времени третьего контура равна
); низкое быстродействие контура положения (постоянная времени третьего контура равна ![]() , где
, где ![]() – некомпенсированная постоянная времени,
– некомпенсированная постоянная времени, ![]() ).
).
За счёт введения в двукратноинтегрирующую САР положения ИО ЭП с типовыми регуляторами корректора контура скорости получена модернизированная двукратноинтегрирующая САР положения ИО ЭП, которая имеет следующие преимущества по сравнению с двукратноинтегрирующей САР положения ИО ЭП с типовыми регуляторами: уменьшена динамическая ошибка по угловой скорости при ступенчатом внешнем возмущающем воздействии в четыре раза; уменьшена динамическая ошибка по перемещению при ступенчатом внешнем возмущающем воздействии в шестнадцать раз; достигнуто предельное быстродействие контура скорости (постоянная времени второго контура равна ![]() ).
).
Однако, модернизированная двукратноинтегрирующая САР положения ИО ЭП имеет следующий недостаток – низкое быстродействие контура положения (постоянная времени третьего контура равна ![]() ).
).
За счёт введения в модернизированную двукратноинтегрирующую САР положения ИО ЭП корректора контура положения и усложнения фильтра контура скорости получена двукратноинтегрирующая САР положения ИО ЭП с улучшенными характеристиками, которая имеет следующие преимущества по сравнению с модернизированной двукратноинтегрирующей САР положения ИО ЭП: уменьшена динамическая ошибка по угловой скорости при ступенчатом внешнем возмущаемом воздействии в два раза; уменьшена динамическая ошибка по перемещению при ступенчатом внешнем возмущаемом воздействии в четыре раза; достигнуто предельное быстродействие контура положения (постоянная времени третьего контура равна ![]() ).
).
Цифровое моделирование трёх САР положения ИО ЭП, позволило проверить полученные закономерности и работоспособность исследуемых систем.
Для примера на рисунке 2 представлена структурная схема модернизированной двукратноинтегрирующей САР положения ИО ЭП, где приняты следующие обозначения: ФКП – фильтр контура положения; ![]() – регулятор положения; ККП – корректор контура положения; ФКС – фильтр контура скорости;
– регулятор положения; ККП – корректор контура положения; ФКС – фильтр контура скорости; ![]() – регулятор скорости; ККС – корректор контура скорости;
– регулятор скорости; ККС – корректор контура скорости; ![]() – регулятор тока;
– регулятор тока; ![]() – импульсный преобразователь;
– импульсный преобразователь; ![]() – компенсирующее устройство;
– компенсирующее устройство; ![]() – задающее напряжение контура положения,
– задающее напряжение контура положения, ![]() ;
; ![]() – задающее напряжение контура скорости,
– задающее напряжение контура скорости, ![]() ;
; ![]() – задающее напряжение контура тока,
– задающее напряжение контура тока, ![]() ;
; ![]() – момент сопротивления ЭП,
– момент сопротивления ЭП, ![]() ;
; ![]() – постоянная времени числителя передаточной функции ККП, с;
– постоянная времени числителя передаточной функции ККП, с; ![]() – коэффициент усиления РП;
– коэффициент усиления РП; ![]() – постоянная времени знаменателя передаточной функции ФКП,
– постоянная времени знаменателя передаточной функции ФКП, ![]() ;
; ![]() – постоянная времени ФКС,
– постоянная времени ФКС, ![]() ;
; ![]() – постоянная времени РС,
– постоянная времени РС, ![]() ;
; ![]() – динамический коэффициент РС;
– динамический коэффициент РС; ![]() – постоянная времени числителя передаточной функции ККС, с;
– постоянная времени числителя передаточной функции ККС, с; ![]() – постоянная времени знаменателя передаточной функции ККС,
– постоянная времени знаменателя передаточной функции ККС,![]() ;
; ![]() – динамический коэффициент РТ;
– динамический коэффициент РТ; ![]() – постоянная времени РТ, с;
– постоянная времени РТ, с; ![]() – коэффициент усиления ИП;
– коэффициент усиления ИП; ![]() – индуктивность якорной цепи ЭД,
– индуктивность якорной цепи ЭД, ![]() ;
; ![]() – коэффициент пропорциональности между током и моментом ЭД,
– коэффициент пропорциональности между током и моментом ЭД, ![]() ;
; ![]() – момент инерции ЭП,
– момент инерции ЭП, ![]() ;
; ![]() – коэффициент пропорциональности между ЭДС и угловой скоростью ЭД,
– коэффициент пропорциональности между ЭДС и угловой скоростью ЭД, ![]() /рад;
/рад; ![]() – сопротивление якорной цепи ЭД,
– сопротивление якорной цепи ЭД, ![]() ;
; ![]() – коэффициент обратной связи по току,
– коэффициент обратной связи по току, ![]() ;
; ![]() – коэффициент обратной связи по скорости,
– коэффициент обратной связи по скорости, ![]() /рад;
/рад; ![]() – коэффициент обратной связи по положению, В/рад;
– коэффициент обратной связи по положению, В/рад; ![]() – комплексный параметр преобразования Лапласа, 1/с.
– комплексный параметр преобразования Лапласа, 1/с.
При выборе параметров РТ:
 ;
; 
передаточная функция контура тока по каналу «задающее напряжение контура тока – ток якорной цепи ЭД» имеет вид
 . (1)
. (1)
Передаточная функция (1) по каналу управления «задающее напряжение контура тока – ток якорной цепи ЭД» соответствует эталонной передаточной функции первого порядка с постоянной времени равной ![]() .
.
При выборе параметров РС и ККС:

![]()
![]()
![]()
![]()
передаточная функция контура скорости по каналам «задающее напряжение контура скорости – угловая скорость ЭП» имеет вид:
 (2)
(2)
 | Рисунок 2 - Структурная схема двукратноинтегрирующей САР положения ИО ЭП с улучшенными характеристиками |
Передаточная функция (2) по каналу управления «задающее напряжение контура скорости – угловая скорость ЭП» соответствует универсальной эталонной передаточной функции третьего порядка с постоянной времени равной ![]()
При выборе параметров РП, ФКП и ККП:

![]()

передаточная функция контура положения по каналу «задающее напряжение контура положения – угол поворота ЭП» имеет вид
 (3)
(3)
Передаточная функция (3) по каналу управления «задающее напряжение контура положения – угол поворота ЭП» соответствует эталонной передаточной функции четвёртого порядка с постоянной времени равной ![]()
Пятая глава диссертационной работы посвящена экспериментальному исследованию позиционных ЭП повышенной точности. Исследовались ЭП лабораторного стенда и ЭП роботов с ЭД №1,2 и 3: ЭП лабораторного стенда с ЭД марки 2ПН10МУХЛ4 мощностью 0,75 кВт; ЭП оснащённый ЭД производства AXEM мощностью 1 кВт (двигатель №1); ЭП оснащённый ЭД производства AXEM мощностью 9 кВт (двигатель №2); ЭП оснащённый ЭД производства AXEM мощностью 0,37 кВт (двигатель №3).
В первой серии экспериментов командоаппарат, формирующий оптимальную по быстродействию диаграмму перемещения ИО ЭП без учёта влияния индуктивности якорной цепи ЭД при ограничении скорости, подаёт сигнал на вход цифровой модели двукратноинтегрирующей САР положения ИО ЭП с улучшенными характеристиками. При этом варьируемым параметром является некомпенсируемая постоянная времени ЭП ![]() , изменяемая от значения 0,0001 с до значения 0,05с.
, изменяемая от значения 0,0001 с до значения 0,05с.
Для примера на рисунке 3 приведены зависимости задающего значения перемещения, фактического перемещения и напряжения ЭП лабораторного стенда от времени, получаемые при формировании управляющего сигнала без учёта влияния индуктивности якорной цепи ЭД при ![]() = 0,0001 с.
= 0,0001 с.
 Рисунок 3 – Зависимости задающего значения перемещения, фактического перемещения и напряжения ЭП лабораторного стенда от времени, получаемые при формировании управляющего сигнала без учёта влияния индуктивности якорной цепи ЭД при
Рисунок 3 – Зависимости задающего значения перемещения, фактического перемещения и напряжения ЭП лабораторного стенда от времени, получаемые при формировании управляющего сигнала без учёта влияния индуктивности якорной цепи ЭД при ![]() = 0,0001 с
= 0,0001 с
Проведённые эксперементальные исследования показывают, что при малых значениях ![]() для различных типов ЭП при формировании управляющего сигнала без учёта влияния индуктивности якорной цепи ЭД максимальное значение напряжения, приложенного к якорной цепи ЭД, при переключениях принимает значения больше допустимых. Поэтому приходится использовать настройки САР положения ИО ЭП с большими значениями
для различных типов ЭП при формировании управляющего сигнала без учёта влияния индуктивности якорной цепи ЭД максимальное значение напряжения, приложенного к якорной цепи ЭД, при переключениях принимает значения больше допустимых. Поэтому приходится использовать настройки САР положения ИО ЭП с большими значениями ![]() .
.
Известно, что реальное значение перемещения при движении с установившейся скоростью отстаёт от эталонного на величину ![]() , а это приводит к появлению ошибки по перемещению на величину
, а это приводит к появлению ошибки по перемещению на величину ![]() , где
, где ![]() – допустимое значение угловой скорости ЭП, рад/с.
– допустимое значение угловой скорости ЭП, рад/с.
Как следует из первой серии экспериментов при ![]() равном 0,005 с для ЭП лабораторного стенда и
равном 0,005 с для ЭП лабораторного стенда и ![]() равное 0,0005 с для электроприводов с ЭД №1, 2 и 3 максимальные значения напряжений, приложенных к якорным цепям ЭД, не превышают допустимых значений. При этом максимальное значение ошибки по перемещению ИО ЭП для ЭП лабораторного стенда равно
равное 0,0005 с для электроприводов с ЭД №1, 2 и 3 максимальные значения напряжений, приложенных к якорным цепям ЭД, не превышают допустимых значений. При этом максимальное значение ошибки по перемещению ИО ЭП для ЭП лабораторного стенда равно ![]() = 0,8 рад, а для ЭП с ЭД №1, 2 и 3 равно
= 0,8 рад, а для ЭП с ЭД №1, 2 и 3 равно ![]() = 0,16 рад.
= 0,16 рад.
Проведённые экспериментальные исследования подтвердили, что при разработке позиционных ЭП повышенной точности необходимо учитывать индуктивность якорной цепи ЭД.
Во второй серии экспериментов командоаппарат, формирующий оптимальную по быстродействию диаграмму перемещения ИО ЭП при ограничениях по напряжению, максимальному и минимальному токам и скорости с учётом влияния индуктивности якорной цепи ЭД, подаёт сигнал на вход цифровой модели двукратноинтегрирующей САР положения ИО ЭП с улучшенными характеристиками.
Для примера на рисунке 4 приведены зависимости задающего значения перемещения, фактического перемещения и погрешности по перемещению от времени при ![]() = 0,0001 с для ЭП с ЭД №1, получаемые с учётом влияния индуктивности якорной цепи ЭД. ЭД №1 производства AXEM мощностью 1 кВт имеет параметры и задания
= 0,0001 с для ЭП с ЭД №1, получаемые с учётом влияния индуктивности якорной цепи ЭД. ЭД №1 производства AXEM мощностью 1 кВт имеет параметры и задания ![]() = 0 рад;
= 0 рад; ![]() =250рад;
=250рад; ![]() = 240 В;
= 240 В; ![]() = 320 рад/с;
= 320 рад/с; ![]() =50,5 А;
=50,5 А; ![]() = 1,6 Ом;
= 1,6 Ом; ![]() = 0,485
= 0,485 ![]() /рад;
/рад; ![]() = 0,485
= 0,485![]() ;
; ![]() =0,018125
=0,018125![]() ;
; ![]() = 0,0004
= 0,0004 ![]() ;
; ![]() = 0
= 0 ![]() . При этом максимальное значение ошибки по перемещению ИО ЭП равно
. При этом максимальное значение ошибки по перемещению ИО ЭП равно ![]() = 0,032 рад, т.е. максимальное значение ошибки по перемещению уменьшилось в 5 раз. Максимальное значение ошибки по перемещению для ЭП лабораторного стенда уменьшилось в 50 раз, а для ЭП с ЭД № 2 и 3 уменьшилось в 5 раз.
= 0,032 рад, т.е. максимальное значение ошибки по перемещению уменьшилось в 5 раз. Максимальное значение ошибки по перемещению для ЭП лабораторного стенда уменьшилось в 50 раз, а для ЭП с ЭД № 2 и 3 уменьшилось в 5 раз.
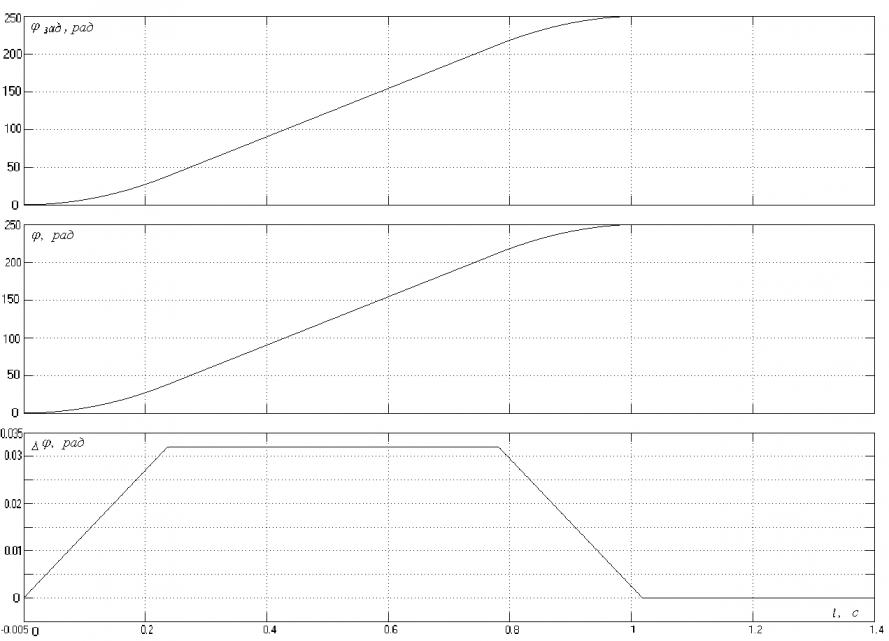 Рисунок 4 – Зависимости задающего значения перемещения, фактического перемещения и погрешности по перемещению от времени при
Рисунок 4 – Зависимости задающего значения перемещения, фактического перемещения и погрешности по перемещению от времени при ![]() =0,0001 с для ЭП, с ЭД №1
=0,0001 с для ЭП, с ЭД №1
Проведённые экспериментальные исследования показали, что использование командоаппаратов, формирующих оптимальные по быстродействию диаграммы перемещения ИО ЭП без учёта влияния индуктивности якорной цепи ЭД, возможно при условии настройки САР положения ИО ЭП с большими значениями ![]() . При этом максимальное значение ошибки по перемещению ИО ЭП не удовлетворяет требованиям, предъявляемым к механизмам повышенной точности.
. При этом максимальное значение ошибки по перемещению ИО ЭП не удовлетворяет требованиям, предъявляемым к механизмам повышенной точности.
При использовании командоаппаратов, формирующих оптимальные по быстродействию диаграммы перемещения ИО ЭП с учётом влияния индуктивности якорной цепи ЭД, и настройке САР положения ИО ЭП с ![]() =0,0001 с максимальное значение ошибки по перемещению ИО ЭП удовлетворяет требованиям, предъявляемым к механизмам повышенной точности.
=0,0001 с максимальное значение ошибки по перемещению ИО ЭП удовлетворяет требованиям, предъявляемым к механизмам повышенной точности.
В заключении отражены основные результаты работы.
Разработаны четыре оптимальные по быстродействию диаграммы перемещения ИО ЭП с учётом влияния индуктивности якорной цепи ЭД при постоянном по величине моменте сопротивления (с ограничением по напряжению; с ограничениями по напряжению и максимальному току; с ограничениями по напряжению и максимальному и минимальному токам; с ограничениями по напряжению, максимальному и минимальному токам и скорости).
Для четырёх оптимальных по быстродействию диаграмм перемещения ИО ЭП разработано математическое обеспечение. На базе математического обеспечения, полученного для оптимальных по быстродействию диаграмм перемещения ИО ЭП, разработано три командоаппарата, формирующих предлагаемые диаграммы.
Синтезированы три двухкратноинтегрирующие САР положения ИО ЭП: с типовыми регуляторами; модернизированная; с улучшенными характеристиками.
Экспериментально подтверждено, что предлагаемые позиционные ЭП обеспечивают повышенную точность перемещения.
Внедрение результатов работы позволит повысить точность позиционирования при реконструкции действующих и проектировании вновь создаваемых позиционных ЭП промышленных роботов в металлургической, машиностроительной, и других отраслях промышленности.
ПЕРЕЧЕНЬ РАБОТ, ОПУБЛИКОВАННЫХ
ПО ТЕМЕ ДИССЕРТАЦИИ
Научная статья, опубликованная в издании по списку ВАК
1. Добробаба Ю.П., Прохоренко Д.С. Разработка оптимальной по быстродействию диаграммы перемещения электроприводов при ограничении по напряжению с учётом влияния индуктивностей якорных цепей электродвигателей // Изв. вузов. Электромеханика. 2008. №6. С. 4346.
Публикации в других изданиях
2. Добробаба Ю.П., Прохоренко Д.С. Разработка оптимальной по быстродействию диаграммы перемещения электроприводов с учетом влияния индуктивностей якорных цепей электродвигателей при локальных ограничениях // Изв. вузов. Пищевая технология. № 2-2007.С.60-64.
3. Добробаба Ю.П., Прохоренко Д.С. Двукратно-интегрирующая система автоматического регулирования положения электропривода // Изв. вузов. Пищевая технология. № 5-6-2007.С.103-104.
4. Прохоренко Д.С., Кошкин Г.А. Разработка оптимальных по быстродействию второго и третьего видов диаграмм перемещения электроприводов с постоянным по значению моментом сопротивления при ограничениях по напряжению и максимальному току // Сборник научных статей «Электроэнергетические комплексы и системы» / Кубан. гос. технол. ун-т. Краснодар: Изд. ГОУ ВПО «КубГТУ», 2009. С. 8692.
5. Прохоренко Д.С., Кошкин Г.А. Разработка оптимальных по быстродействию второго и третьего видов диаграмм перемещения электроприводов с постоянным по значению моментом сопротивления при ограничениях по напряжению, максимальному и минимальному токам // Сборник научных статей «Электроэнергетические комплексы и системы» / Кубан. гос. технол. ун-т. Краснодар: Изд. ГОУ ВПО «КубГТУ», 2009. С. 93101.
6. Прохоренко Д.С., Кошкин Г.А. Разработка оптимальных по быстродействию второго и третьего видов диаграмм перемещения электроприводов с постоянным по значению моментом сопротивления при ограничениях по напряжению, максимальному и минимальному токам и скорости // Сборник научных статей «Электроэнергетические комплексы и системы» / Кубан. гос. технол. ун-т. Краснодар: Изд. ГОУ ВПО «КубГТУ», 2009. С. 102110.
7. Прохоренко Д.С. Разработка оптимальной по быстродействию диаграммы перемещения электроприводов с постоянным по значению моментом сопротивления. Постановка задач // Мат-лы междун. науч.-практич. конференции «Электроэнергетические комплексы и системы» / Кубан. гос. технол. ун-т. Краснодар: Изд. ГОУ ВПО «КубГТУ», 2006. С. 6770.
8. Прохоренко Д.С., Кошкин Г.А., Омельченко А.П. Разработка первого вида оптимальных по быстродействию диаграмм перемещения электропривода с постоянным по значению моментом сопротивления при ограничениях по напряжению // Мат-лы междун. науч.-практич. конференции «Электроэнергетические комплексы и системы» / Кубан. гос. технол. ун-т. Краснодар: Изд. ГОУ ВПО «КубГТУ», 2006. С. 7173.
9. Прохоренко Д.С., Кошкин Г.А., Омельченко А.П. Разработка второго вида оптимальных по быстродействию диаграмм перемещения электропривода с постоянным по значению моментом сопротивления при ограничениях по напряжению // Мат-лы междун. науч.-практич. конференции «Электроэнергетические комплексы и системы» / Кубан. гос. технол. ун-т. Краснодар: Изд. ГОУ ВПО «КубГТУ», 2006. С. 7476.
10. Прохоренко Д.С., Кошкин Г.А., Харламов А.В. Разработка третьего вида оптимальных по быстродействию диаграмм перемещения электропривода с постоянным по значению моментом сопротивления при ограничениях по напряжению // Мат-лы междун. науч.-практич. конференции «Электроэнергетические комплексы и системы» / Кубан. гос. технол. ун-т. Краснодар: Изд. ГОУ ВПО «КубГТУ», 2006. С. 7781.
11. Прохоренко Д.С. Разработка четырёх видов оптимальных по быстродействию диаграмм перемещения электроприводов при постоянном по значению моменте сопротивления // Материалы VIII региональной научно-практической конференции молодых учёных «Научное обеспечение агропромышленного комплекса» / Сборник материалов.-Краснодар: КубГАУ, 2006 г. С. 332-334.
12. Прохоренко Д.С., Агаджанян Р.С. Разработка первого вида оптимальных по быстродействию диаграмм перемещения электропривода с постоянным по значению моментом сопротивления при ограничениях по напряжению и максимальному току // Мат-лы междун. науч.-практич. конференции «Электроэнергетические комплексы и системы» / Кубан. гос. технол. ун-т. Краснодар: Изд. ГОУ ВПО «КубГТУ», 2007. С. 9093.
13. Прохоренко Д.С., Омельченко А.П. Разработка первого вида оптимальных по быстродействию диаграмм перемещения электропривода с постоянным по значению моментом сопротивления при ограничениях по напряжению, максимальному току и минимальному токам // Мат-лы междун. науч.-практич. конференции «Электроэнергетические комплексы и системы» / Кубан. гос. технол. ун-т. Краснодар: Изд. ГОУ ВПО «КубГТУ», 2007. С. 9498.
14. Прохоренко Д.С. Разработка первого вида оптимальных по быстродействию диаграмм перемещения электропривода с постоянным по значению моментом сопротивления при ограничениях по напряжению, максимальному току и минимальному токам и скорости // Мат-лы междун. науч.-практич. конференции «Электроэнергетические комплексы и системы» / Кубан. гос. технол. ун-т. Краснодар: Изд. ГОУ ВПО «КубГТУ», 2007. С. 99104.
15. Прохоренко Д.С. Позиционный электропривод повышенной точности // Мат-лы второй междун. науч.-практич. конференции «Технические и технологические системы» / Сборник материалов.-Краснодар: КВВАУЛ, 2010 г. С. 153-157.
16. Пат. на изобретение №2401501 РФ, МПК Н 02 Р 7/06 (2006.01). Позиционный программно управляемый электропривод / Добробаба Ю.П., Прохоренко Д.С., заявитель и патентообладатель Кубан. гос. технол. ун-т. – № 2009123744/09; заявл. 22.06.2009; опубл. 10.10.2010, Бюл. №28.
17. Пат. на полезную модель №55230 РФ, МПК Н 02 Р 5/60 (2006.01). Устройство для формирования диаграмм перемещения исполнительного органа механизма, упруго соединённого с электродвигателем, с ограничением скорости и её первой, второй, третьей и четвёртой производных / Добробаба Ю.П., Мурлина В.А., Кошкин Г.А., Добробаба С.В., Прохоренко Д.С., заявитель и патентообладатель Кубан. гос. технол. ун-т. – № 2006111563/22; заявл. 07.04.2006; опубл. 27.07.2006, Бюл. №21.
18. Пат. на полезную модель №69354 РФ, МПК Н 02 Р 7/06 (2006.01). Устройство для формирования оптимальной по быстродействию диаграммы перемещения электропривода с моментом сопротивления типа сухого трения при ограничении по напряжению / Добробаба Ю.П., Прохоренко Д.С., Барандыч В.Ю., Коноплин В.И., заявитель и патентообладатель Кубан. гос. технол. ун-т. – № 2007120427/22; заявл. 31.05.2007; опубл. 10.12.2007, Бюл. №34.
19. Пат. на полезную модель №101286 РФ, МПК Н 02 Р 7/17 (2006.01). Устройство для формирования сигнала, соответствующего оптимальной по быстродействию диаграмме перемещения исполнительного органа электропривода с моментом сопротивления типа сухого трения при ограничении по напряжению, току и частоте вращения / Добробаба Ю.П., Прохоренко Д.С., заявитель и патентообладатель Кубан. гос. технол. ун-т. – № 2010127709/07; заявл. 05.07.2010; опубл. 10.01.2011, Бюл. №1.
Подписано в печать 24.08.2011 г. Объем 1,5 печ. л. Зак. 522 Тираж 100 экз.
ООО «Издательский Дом-Юг»
350072, г. Краснодар, ул. Московская 2, корп. «В», оф. В-120
Тел. 8-918-41-50-571