

Использование вибрационных испытаний в контроле технического состояния самолётов
На правах рукописи
Бобрышев Александр Петрович
ИСПОЛЬЗОВАНИЕ ВИБРАЦИОННЫХ
ИСПЫТАНИЙ В КОНТРОЛЕ ТЕХНИЧЕСКОГО
СОСТОЯНИЯ САМОЛЁТОВ
Специальность:
05.07.03 – Прочность и тепловые режимы
летательных аппаратов
Автореферат
диссертации на соискание учёной степени
кандидата технических наук
Новосибирск — 2009
Работа выполнена в Федеральном государственном унитарном предприятии «Сибирский научно-исследовательский институт авиации имени С. А. Чаплыгина»
Научный руководитель: доктор технических наук, профессор
Филимонов Борис Петрович
Официальные оппоненты: доктор технических наук, профессор
Яковлев Игорь Валентинович,
доктор технических наук, доцент
Левин Владимир Евгеньевич
Ведущая организация — ФГУП «Центральный аэрогидродинамический институт имени профессора Н. Е. Жуковского», г. Жуковский.
Защита состоится «23» апреля 2009 г. в 15 часов на заседании диссертационного совета Д 212.173.13 при ГОУ ВПО «Новосибирский государственный технический университет» по адресу: 630092, г.Новосибирск, проспект Карла Маркса, д. 20
Автореферат разослан «___» марта 2009г.
С диссертацией можно ознакомиться в библиотеке Новосибирского государственного технического университета.
Учёный секретарь
диссертационного совета
кандидат технических наук,
доцент Иванцивский В.В.
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность темы
Современные требования к надёжности, эффективности и безопасной эксплуатации авиационной техники приводят к необходимости разработки технических средств и методов для оценки технического состояния летательного аппарата (л.а.). Несмотря на тщательный контроль за соблюдением технологической дисциплины, качеством изготовления деталей и агрегатов, точностью сборочных работ, надёжная оценка технического состояния летательного аппарата возможна только на основе объективного контроля. К сожалению, широко известные методы объективного контроля (визуальный осмотр, неразрушающие методы), в силу разных причин, не всегда могут быть использованы, а во многих случаях не дают комплексного ответа о техническом состоянии объекта контроля. В этой связи несомненную актуальность приобретает использование периодических виброчастотных (или частотных) испытаний полностью собранных и укомплектованных оборудованием самолётов. Под частотными испытаниями понимается определение обобщённых масс, частот, форм и декрементов собственных тонов колебаний. При этом для определения технического состояния л.а. используются возможные отклонения динамических характеристик. Контроль может происходить либо на уровне качественной оценки (наличие или отсутствие дефекта), либо на уровне количественной оценки одного или нескольких дефектов.
Наибольшее распространение в общем машиностроении нашли виброчастотные методы в режиме вынужденных колебаний. Анализируя работы по вибропрочностным испытаниям в режиме вынужденных колебаний можно отметить, что происходит переход от сравнительно простых подходов и методов качественной оценки дефектов объекта (типа да – нет) к методам количественной оценки наличия множества дефектов. В любом случае процедура частотных испытаний л.а. для оценки их технического состояния распадается на два основных этапа. Во-первых, проведение прецизионных испытаний, которые проводятся для определения частотного паспорта самолёта. Результаты испытаний исследуются, в том числе, и на предмет появления в них отклонений либо от соответствующих расчётных, либо от результатов ранее проведённых испытаний самолётов рассматриваемого типа. Возможно и нарушение симметрии характеристик, присущих симметричному объекту. Причиной таких изменений могут являться конструктивно-технологические дефекты. Во-вторых, выполняется специально разработанная методика обработки полученных данных, которая, по сути, сводится к решению обратной задачи теории колебаний.
Традиционные частотные испытания л.а. не позволяют определить причину отклонений динамических характеристик, поэтому целесообразна разработка методики использования их результатов для обнаружения дефектов.
Цель работы: разработка методики выявления конструктивно-технологических дефектов планера самолёта и его систем по результатам вибрационных испытаний.
Для достижения поставленной цели необходимо решить следующие основные задачи:
1.Разработать расчётную модель механической проводки управления самолёта. Провести расчётно-экспериментальные исследования динамического поведения проводки с люфтами. Определить параметры, позволяющие установить местоположение люфта и оценить его величину по результатам вибрационных испытаний.
2. Разработать нелинейную расчётную модель органов управления, оборудованных гидравлическими демпферами. Параметры модели определить по результатам вибрационных испытаний. Исследовать влияние параметров демпферов на эффективность гашения колебаний рулей.
3. Показать возможность использования искажений характеристик форм колебаний планера самолёта и отклоняемых поверхностей для выявления конструктивно-технологических дефектов.
4. Исследовать резонансные режимы колебаний трубопроводов бортовых систем в диапазоне частот вращения двигателей.
5.Рразработать конструктивно-технические рекомендации по доводке изделий.
Научная новизна
Разработана методика использования результатов вибрационных испытаний для выявления конструктивно-технологических дефектов, позволяющая контролировать качество изготовления самолётов и основанная на:
— расчётно-экспериментальном определении местоположения и оценки величин люфтов в механических проводках управления для обеспечения аэроупругой устойчивости самолётов;
— идентификации расчётной модели органа управления с гидравлическими демпферами по результатам испытаний, позволяющей оценить влияние параметров демпферов на эффективность гашения колебаний рулей;
— взаимосвязи между искажениями характеристик форм колебаний планера и отклоняемых поверхностей, заложенных в конструкцию самолёта, и конструктивно-технологическими дефектами.
Практическая ценность работы
Результаты работы позволили для ряда изделий нескольких типов:
1. Установить наличие и вид дефектов.
2. Определить местоположения дефектов для последующего его устранения с минимальной разборкой конструкции.
3. Выработать рекомендации по улучшению технических характеристик изделий.
Достоверность результатов диссертационной работы определяется применением основных положений т еории механических колебаний; использованием расчётных моделей, адекватность которых установлена экспериментально, а также проведением специальных испытаний и инструментального контроля дефектов. Представленные в работерезультаты получены на основе экспериментальных исследований с использованием апробированных методик, современного прецизионного оборудования.
Реализация работы. Внедрение результатов работы осуществлено на ОАО «НАПО им. В.П.Чкалова», ОАО «Корпорация «ИРКУТ».
Личный вклад автора заключается в постановке задач, выборе методов их решения, участии в проведении экспериментов, анализе результатов исследований, формулировке выводов.
Апробация работы. Основные результаты работы докладывались на Всероссийской научно-технической конференции, посвящённой 60-летию отделений аэродинамики летательных аппаратов и прочности авиационных конструкций СибНИА (Новосибирск, 2004 г.), Всероссийской научно-технической конференции «Наука, промышленность, оборона» (Новосибирск, 2006 г.), объединённом научном семинаре кафедр «Прочность летательных аппаратов» и «Самолёто- и вертолётостроение» НГТУ, научно-техническом Совете ФГУП «СибНИА им. С. А. Чаплыгина» (Новосибирск, 2008 г.).
Публикации. По материалам диссертации опубликовано 6 печатных работ, из них: 2 статьи в журналах, входящих в перечень изданий, рекомендованных ВАК РФ, 1 – в сборнике научных трудов, 2 – в сборниках трудов Всероссийских научно-технических конференций, 1 патент на изобретение.
Структура и объём диссертации
Диссертация состоит из введения, четырёх глав, заключения, списка литературы из 103 наименований и приложения. Объём диссертации составляет 131 страницу основного текста, включая 53 рисунка и 4 таблицы.
ОСНОВНОЕ СОДЕРЖАНИЕ РАБОТЫ
Во введении обосновывается актуальность темы диссертации, её цель и научная новизна результатов. Дано краткое изложение работы по главам.
В первой главе содержится обзор публикаций, близких к диссертации по теме и методам исследований: методы вибрационных испытаний и идентификации динамических систем, методики выявления конструктивно-технологических дефектов.
Решению основных проблем частотных испытаний, таких как подбор сил, анализ результатов и контроль точности посвящены работы В.И.Смыслова, К.И.Васильева, В.И.Ульянова, Г.Н.Микишева, Б.И.Рабиновича, Л.С.Белоусова, Б.А.Логунова, Р.А.Шибанова, Виттмайера, Р.Дата, Д.Клерко, Льюиса, Рисли,
Гойдера, Эвинса и др. Задачи идентификации динамических систем, а также коррекции расчётных моделей по результатам испытаний решались М.С.Галкиным, В.Д.Ильичёвым, В.В.Назаровым, В.И.Смысловым, Б.Д.Брянцевым, В.А.Лазаряном, С.Ф.Редько, А.Берманом, Е.Дж.Нэги, М.Барухом, В.О.Кононенко, Н.П.Плахтиенко, Д.Гиббсона и др. Методы оценки технического состояния машин, основанные на анализе вибрационного сигнала, разрабатывались В.Н.Костюковым, А.В.Барковым, А.Ф.Нафиковым, А.А.Стеценко, Р.Р.Сулеймановым и др. На основании анализа известных литературных данных сформулированы основные выводы и постановка решаемых в диссертации задач.
Во второй главе изложена методика контроля люфтов в механических проводках управления. Исследования проводились как по математической модели, так и на специально созданной экспериментальной установке.
Рассматривается механическая проводка управления, представляющая собой систему качалок, последовательно соединённых между собой тягами. В соединениях между тягами и качалками возможен зазор и сухое трение. В опорных подшипниках органа управления также может присутствовать сухое трение.
Динамическая модель сформулирована на основе следующих допущений:
— орган управления является жёстким телом;
— тяги являются линейно-деформируемыми стержнями с двумя степенями свободы;
— качалки являются свободно вращающимися стержневыми системами с плечами, работающими на изгиб.
Для формирования уравнений движения записаны матрицы жёсткости и инерции для типовых элементов, а также матрица преобразования координат из локальных в глобальную. Уравнения дополняются условиями совместного движения узлов в зазоре соединения плеча качалки и тяги. При этом зазор представляется безинерционным продолжением тяги.
В качестве тестируемой контрукции использовалась макетная проводка управления, собранная на жёстком основании из элементов проводки самолёта Су-34 (рисунок 1). Тяги соединяются с качалками через шаровые подшипники скольжения болтами диаметром 7мм с допуском -13... -28мкм. В данном случае все болты имели одинаковый диаметр 7мм –18мкм. Для имитации люфтов была изготовлена серия болтов с отклонениями в 35, 40 и 50 мкм. Жёсткое основание вывешено на упругих шнурах. Орган управления имитировался жёсткой балкой.
Возбуждение колебаний имитатора органа управления производилось электродинамическим вибратором. Измерения вибраций — датчиками ускорений, установленными как на имитаторе, так и на торцах всех тяг.
Величины параметров, входящих в математическую модель, определялись как по чертежам проводки управления, так и методами идентификации (сухое трение в опорном подшипнике). Кроме того, модель была дополнена описанием датчика ускорений в виде дифференциального уравнения
![]()
где х — перемещение инерционного элемента относительно основания датчика;

Рисунок 1. Стенд для испытаний проводки управления.
хосн — перемещение основания датчика;
, — собственная частота и декремент колебаний инерционного элемента датчика.
Сигналы датчиков, как и в натурном эксперименте, пропускались через двойной фильтр Баттерворта второго порядка.
С использованием математической модели были исследованы зависимости резонансных частот p от амплитуды возбуждающей силы F при различных величинах и расположениях люфтов (рисунок 2). Аналогичные зависимости были получены в натурных испытаниях.
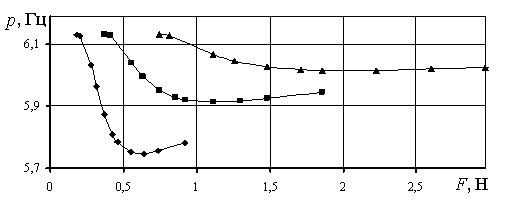
Рисунок 2. Зависимость резонансной частоты от амплитуды
вынуждающей силы.
Характерное изменение резонансной частоты — достаточно резкое уменьшение (до 10% и более) с ростом силы, затем плавное возрастание — позволяет судить о наличии люфта в проводке управления, но не представляется возможным диагностировать величину и положение дефекта.
Для выявления дефектного соединения использовалась информация, полу-
ченная с датчиков, установленных на торцах тяг. При этом наличие местных нелинейных искажений сигналов датчиков из-за появления дефекта анализировалось с помощью фигур Лиссажу. На рисунке 3 приведены полученные расчётом и в эксперименте фигуры Лиссажу для одного и того же соединения проводки. Здесь n — перегрузка, зафиксированная датчиком ускорений; U = аsint – сигнал генератора с амплитудой а и частотой, формирующий возбуждающую силу. Для идеальной системы эти фигуры — эллипс.
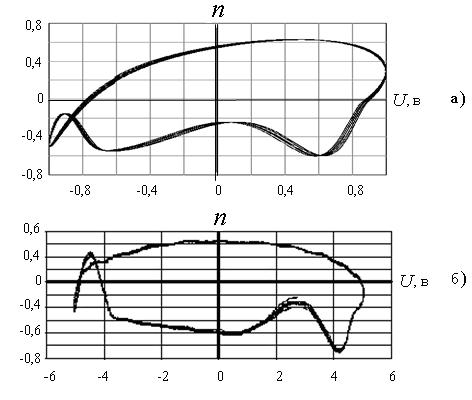
Рисунок 3. Расчётная (а) и экспериментальная (б) фигуры Лиссажу.
Для численного анализа искажений использовалось преобразование Фурье. Количество членов ряда разложения выбиралось таким, чтобы ряд описывал искомую функцию с такой же точностью, с какой она измеряется в эксперименте. Затем выделяется первая гармоника, суммируется остаток ряда и сумма относится к амплитуде первой гармоники. Эта величина обозначена как и характеризует искажения, вызванные люфтом.
В качестве иллюстрации чувствительности параметра к появлению люфта приведём следующий пример: на наиболее удалённой от органа управления качалке установлен болт с отклонением в 50мкм. Для этого соединения величина оказалась равной 101,6. На втором плече этой же качалки – 59,7, а на органе управления – 10,9.
Чувствительность фигур Лиссажу к величине люфта иллюстрирует рисунок 4 (=0 соответствует зажатой вилке качалки). Бльшие искажения фигур с увеличением люфта очевидны.
Следующей задачей является оценка величины люфта. Исследования показали, что оценить величину люфта возможно с использованием зависимости резонансной частоты от амплитуды колебаний органа управления. На этой зависимости необходимо выделить две точки: точку, где начинает проявляться люфт, то есть начинает убывать резонансная частота, и точку, где частота перестаёт убывать. Обозначим амплитуды перемещений в этих точках через А1 и А2. Если точка с амплитудой А1 явно не определяется по графику, то следует использовать данные, полученные от датчика вблизи дефектного узла: началом проявления люфта является появление характерных искажений на фигуре Лиссажу.


Рисунок 4. Фигуры Лиссажу для различных величин люфта.
Отметим, что величина А1 зависит от статического поджатия в элементах проводки (им можно управлять), а А2 – от статического поджатия и величины люфта. Для оценки величины люфта предложена формула
 .
.
В результате обработки экспериментальных данных и расчётов по математической модели получено значение коэффициента К=120 мкм для тестируемой проводки. При этом разброс в оценке люфта не превышал 10%.
Если допустить линейность зависимости относительной частоты е/0 (е-резонансная частота при полном раскрытии люфта, 0-резонансная частота- при амплитуде колебаний А1) от относительного люфта /А1, то для вычисления люфта получим более общую формулу:
= 3,5А1 .
.
Здесь -коэффициент, определяющийся кинематикой проводки управления.
Таблица 1. Оценка величины люфта
| Номер точки | Истинный люфт (мкм) | Вычисленный люфт (мкм) |
| 2 | 35 | 38,3 |
| 2 | 50 | 52,6 |
| 4 | 35 | 35,3 |
| 4 | 50 | 53,9 |
Итак, предложенная методика позволяет выявить дефектную проводку управления, определить дефектный узел и вычислить величину люфта с достаточной точностью.
В третьей главе исследуются динамические характеристики органов управления с гидравлическими демпферами.
Отмечается, что решение об установке демпферов может приниматься тогда, когда самолет уже выпускается серийно. В этом случае программа частотных испытаний самолёта предусматривает как испытания органов управления с демпферами, так и без них. Результаты испытаний рулей направления двух типов изделий показали, что характеристика демпфирования колебаний рулей с одним демпфером мало отличается от этой характеристики с двумя демпферами в исследуемом диапазоне амплитуд колебаний (рисунок 5).

Рисунок 5. Зависимость декремента колебаний руля от амплитуды
A его колебаний (цифры означают количество демпферов).
Исследование этого явления производится с помощью нелинейной математической модели, параметры которой определяются по результатам испытаний. Учитываются степени свободы, связанные с поворотом руля и перемещением невесомого штока демпфера. Определению подлежат жёсткость демпфера и его опор, люфт в узлах установки демпфера, сухое трение в демпфере, жёсткость проводки управления, момент инерции руля.
Система уравнений движения органа управления и штока демпфера имеют вид:

Здесь, J — угол поворота и момент инерции руля;, — амплитуда и частота возбуждающего момента; С, h жёсткость и коэффициент демпфирования проводки управления; у — перемещение штока демпфера; f1(,y) — сила, действующая на орган управления со стороны демпфера.
Второе уравнение системы есть уравнение движения штока демпфера.
Уравнения записываются для различных фаз движения системы. Вынужденные колебания руля полагаются гармоническими. Уравнение движения штока решается точно, определяются установившиеся колебания штока. Уравнения движения руля получены методом гармонической линеаризации.
Для снижения вероятности ошибочного описания нелинейной модели, параметры её находятся по таким режимам вынужденных колебаний, характеристики которых с достаточной точностью определяются одним из неизвестных параметров. Так жёсткость проводки управления рассчитывается по резонансной частоте руля без демпферов. Сухое трение в демпфере — по зависимости амплитуды колебаний штока от амплитуды колебаний руля. Для определения жёсткостей опор демпферов использовались результаты испытаний руля с установленными вместо демпферов жёсткими тягами. При оценке внутренней жёсткости демпфера учитывалось не только изменение резонансной частоты руля с постановкой демпфера, но и сухое трение в демпфере, а также сдвиг фазы колебаний штока относительно фазы колебаний руля (вклад сил демпфирования в восстанавливающие силы). Результаты расчётов по математической модели сравниваются с результатами испытаний. Отмечается, что различие между расчётными и экспериментальными резонансными частотами обычно не превышают 1% во всём диапазоне амплитуд колебаний рулей, а демпфирование реальной системы с достаточной точностью описывается математической моделью при больших амплитудах колебаний. Проведён анализ причин различия между расчётными и экспериментальными характеристиками демпфирования.
Исследуется влияние отдельных параметров системы на амплитудные зависимости жёсткости и демпфирования рулей. Показано, что эффективность демпферов, в рассматриваемых случаях, можно повысить за счёт увеличения жёсткостей их опор. На рисунке 6 представлены результаты расчёта по математической модели. Здесь – площадь петли гистерезиса системы «рул гидравличскский демпфер», А – амплитуда колебаний задней кромки руля, С – жёсткость руля при

Рисунок 6. Влияние жёсткостей опор
демпфера на демпфирование руля
замене демпфера на жёсткую тягу. Величина С меняется от исходной до С*.
Таким образом, проведённые исследования показали, что для рассмотренных изделий двукратное увеличение жёсткости опор демпфера может повысить демпфирование руля до 50% для максимального уровня амплитуд колебаний, реализованных в испытаниях.
В четвёртой главе рассматриваются примеры выявления конструктивно-технологических дефектов. Отмечается, что, несмотря на конкретность решаемых задач, способы их решения могут быть использованы в исследованиях других конструкций.
Использовать общие формы колебаний планера для выявления конструктивно-технологических дефектов обычно не удаётся: изменения упругих и инерции-
онных характеристик самолёта из-за локального дефекта, как правило, мало влияют на собственные частоты и формы таких колебаний. Но исключения возможны. Так в процессе испытаний опытного самолёта обнаружилось существенное снижение собственной частоты вертикального изгиба фюзеляжа первого тона по сравнению с расчётной частотой, а задний узел этой формы колебаний сместился к центру фюзеляжа. Такое смещение узла в совокупности со снижением собственной частоты возможно в том случае, если в задней части фюзеляжа возникают интенсивные колебания большой упруго закреплённой массы. Дополнительные исследования показали, что вблизи собственной частоты первого тона изгиба фюзеляжа наблюдаются резонансные колебания основных стоек шасси с недопустимо высокой амплитудой. Система фиксирования стоек в убранном положении была доработана.
Влияние технологического дефекта на обобщённые жёсткости общих форм колебаний иллюстрируется на следующем примере. Результаты испытаний самолёта выявили значительное расхождение между собственными частотами второго тона кручения левой и правой половины крыла. При этом в первых и вторых тонах изгибов и первого тона кручения таких расхождений не обнаружилось. В результате анализа форм колебаний удалось локализовать место и причину появления дефекта: технологические отступления в креплении агрегата.
Рассмотрена задача определения величины эквивалентного сухого трения в опорных подшипниках и проводке органа управления. Строится нелинейная математическая модель органа управления. По экспериментальным резонансным частотам определяются параметры жёсткости.
Эквивалентное сухое трение определяется из условия:
Здесь Ф, Фm — амплитуда затухающих колебаний органа управления; F(Ф), F*(Ф) — отношения площади петли гистерезиса к нелинейной жёсткости проводки управления, полученных, соответственно, из эксперимента и по математической модели.
Построенная таким способом модель хорошо отражает жёсткость и демпфирование реальной системы при больших амплитудах колебаний.
Решается задача выявления причин изменений резонансных частот и искажения форм колебаний вращения отклоняемых поверхностей на примере флаперонов двух изделий. На рисунке 6 показаны нормированные формы колебаний Y вращений флаперонов одного из изделий (ось относительной координаты Z направлена вдоль правой половины крыла). Искажённой является форма колебаний правого флаперона.
Разрабатывается конечно-элементная расчётная модель флаперона, проверяется её адекватность и проводятся исследования в виде численного эксперимента. Делается предположение, что обнаруженные в испытаниях отклонения могут являться следствием несоосной установки опор флаперона.

— передняя кромка флаперона, — задняя кромка флаперона,
— задняя кромка крыла
Рисунок 7. Симметричное вращение флаперонов
Сделана расчётная оценка величин реакций опор, возникающих при их смещении. На основании полученных результатов делается вывод о том, что возможно смещение только концевой опоры: смещение других опор требует нереально больших усилий.
Для проверки правильности этого предположения были проведены испыта-ния флаперонов с отсоединёнными концевыми опорами. В результате резонанс-
ные частоты вращений флаперонов стали близкими, а формы колебаний близкими к симметричным (рисунок 8). Проведённый далее инструментальный контроль показал, что концевые опоры флаперонов были смещены относительно штатного положения.
Одним из видов вибрационных испытаний являются частотные испытания изолированной силовой установки с целью определения парциальных собственных частот двигателя на подмоторной раме. В работе предлагается их использовать для контроля частотной отстройки трубопроводов систем двигателя.
Исследуются причины разрушения трубопровода противообледенительной системы самолёта Су-24М. Разрушением являлась трещина вдоль продольного шва криволинейного участка трубопровода (материал – сплав ОТ4-1).

Рисунок 8. Симметричное вращение флаперонов без концевых опор
Для выявления причин разрушения разработана расчётная модель, которая представляла собой сочетание торообразных оболочек в зоне разрушения и балочных элементов в остальных частях магистрали.
В результате расчётных исследований (статических и динамических) получено, что статические напряжения вследствие воздействия внутреннего давления и температуры не превышают 7 кг/мм2 в месте разрушения. Динамический расчёт всей магистрали системы выявил следующие собственные частоты: 123, 161, 173 Гц. При этом на частоте 123 Гц в форме собственных колебаний присутствует интенсивное кручение разрушавшегося криволинейного участка.
Особый интерес представляют результаты расчёта окружных напряжений, которые следует приложить для закрытия трещины после того, как трубопровод демонтирован. В этом случае ширина раскрытия трещины определяется, в основном, остаточными технологическими напряжениями. Вычисления привели к значению напряжений 74 кг/мм2. Несмотря на то, что эта величина является завышенной, результаты расчёта указывают на значительные остаточные напряжения.
Далее были проведены измерения напряжений в трубопроводе при наземных гонках двигателя.
Гармонический анализ динамической составляющей напряжений выявил наличие резонансных колебаний трубопровода в диапазоне частот 100 200 Гц (рисунок 9). Резонансные частоты хорошо согласуются с их расчётными значениями. При этом динамические напряжения достигают 0,6 кг/мм2 на частоте 125 Гц и определяются кручением колена трубопровода.
Таким образом, установлено, что причиной разрушения трубопровода является совокупность высоких технологических напряжений и его резонансные колебания. Для устранения причин разрушения предложено изменение конструкции трубопровода.
Заключение
1. Разработана расчётная модель механической проводки управления с учётом люфтов в соединениях. Изготовлена макетная проводка управления из элементов проводки самолёта Су-34. Проведены расчётно-экспериментальные исследования динамического поведения проводки с люфтами. Установлено, что местоположение дефекта можно определить по искажениям фигур Лиссажу в соединениях элементов проводки. Получена формула для оценки величины люфта.
2. Для исследования влияния параметров гидравлических демпферов на динамические характеристики органов управления разработана нелинейная расчётная модель. Параметры модели определены методами идентификации по результатам частотных испытаний рулей направления двух типов изделий. Проведены расчётные оценки влияния рассеяния энергии в демпфере за счёт перетекания рабочей жидкости по дроссельным щелям, сухого трения в подвижных соединениях демпфера, внутренней жёсткости демпфера, жёсткости и люфта его опор на динамическую жёсткость и демпфирования колебаний рулей. Показано, что для повышения эффективности демпферов (для рассмотренных изделий) необходимо увеличить жёсткость их опор.
3. Показано, что для выявления некоторых конструктивно-технологических дефектов можно использовать изменения характеристик общих форм колебаний планера самолёта. Например, снижение резонансной частоты и смещение узлов вертикального изгиба фюзеляжа первого тона может являться следствием резонансных колебаний основных стоек шасси в убранном положении.
4. Предложен способ оценки величины сухого трения в опорах и проводке органов управления, основанный на использовании расчётной модели, параметры которой определены по результатам испытаний.
5. Решена задача выявления причин искажения форм резонансных колебаний вращения отклоняемых поверхностей на примере флаперонов двух изделий. Разработана расчётная модель флаперона. Расчётными и экспериментальными исследованиями установлено, что причиной искажения форм колебаний является технологический дефект — смещение узла навески флаперона.
6. Исследованы причины разрушения трубопроводов противообледенительной системы самолёта Су-24М. В результате выполнения расчётов, наземных и лётных испытаний определено, что причиной разрушения является совокупность конструктивного и технологического дефектов.
7. По результатам каждого из проведённых исследований выработаны рекомендации либо по устранению дефектов, либо по улучшению технических характеристик изделий.
Основные результаты диссертации опубликованы в следующих работах:
1. Исследование причин разрушения трубопроводов противообледенительной системы самолёта Су-24М. / А. П. Бобрышев, В. А. Бернс, В. И. Капустин, В. В. Красовский и др. // Аэродинамика и прочность конструкций летательных аппаратов: тр. Всерос. науч.-техн. конф., посв. 60-летию отделений аэродинамики л. а. и прочности авиаконструкций. 15-17 июня 2004 года. – Новосибирск : СибНИА, 2005. – С. 297-298.
2. Бобрышев А. П. Опыт применения вибрационных испытаний при конструкторско-технологической доводке самолётов / А. П. Бобрышев // Тр. Всерос. науч.-техн. конф. "Наука, промышленность, оборона". – Новосибирск : 2006. – С. 8-9.
3. Пат. № 2343440 Российская Федерация, МПК7 G01М 7/02. Способ выявления люфтов в жёсткой проводке управления летательного аппарата / А. П. Бобрышев, А. Н. Серьёзнов, В. А. Бернс, В. Ф. Самуйлов – № 2007112175/11 ; заявл. 02.04.07 ; опубл. 10.01.09, Бюл. № 1 – 10 с.
4. Способ контроля люфтов в механических проводках управления самолётов / А. П. Бобрышев, В. А. Бернс, В. Л. Присекин, А. И. Белоусов, В. Ф. Самуйлов // Полёт. – 2007. – № 12. – С. 50-53.
5. Бернс В. А. Об использовании общих форм колебаний планера для выявления конструктивно-технологических дефектов / В. А. Бернс, А. П. Бобрышев, В. Ф. Самуйлов // Научный вестник НГТУ – 2008. – № 1(30). – С. 156–159.
6. Контроль соосности установки отклоняемых поверхностей по результатам вибрационных испытаний / В.А. Бернс, А. П. Бобрышев, В. Л. Присекин, В. Ф. Самуйлов // Вестник МАИ – 2008. – Т. 1, № 1. – С. 87-91.