

Моделирование процессов обнаружения пеленгационного сигнала в аэродромных квазидоплеровских автоматических радиопеленгаторах
На правах рукописи
Мамедов Летиф Кафланович
МОДЕЛИРОВАНИЕ ПРОЦЕССОВ
ОБНАРУЖЕНИЯ ПЕЛЕНГАЦИОННОГО СИГНАЛА В АЭРОДРОМНЫХ КВАЗИДОПЛЕРОВСКИХ АВТОМАТИЧЕСКИХ РАДИОПЕЛЕНГАТОРАХ
Специальность
05.13.18 - математическое моделирование, численные методы и комплексы программ
АВТОРЕФЕРАТ
диссертации на соискание ученой степени кандидата технических наук
Махачкала - 2012
Работа выполнена в федеральном государственном бюджетном
образовательном учреждении высшего профессионального образования
«Дагестанский государственный технический университет».
Научный руководитель:
доктор технических наук, профессор Асланов Гайдарбек Кадырбекович
Научный консультант:
доктор технических наук, доцент Мустафаев Арслан Гасанович
Официальные оппоненты:
Баламирзоев Абдул Гаджибалаевич - доктор технических наук, профессор кафедры математики и информатики Махачкалинского филиала ФГБОУ ВПО «Московский автомобильно-дорожный институт (ГТУ)»
Канаев Магомедимин Муталимович - кандидат технических наук, доцент кафедры прикладной математики и информатики, ФГБОУ ВПО «Дагестанский государственный технический университет»
Ведущая организация: ОАО НПК «Русская радиоэлектроника»
Защита состоится «27» 12 2012 года в 1400 часов на заседании диссертационного совета Д 212.052.02 в ФГБОУ ВПО «Дагестанский государственный технический университет», 367015, Республика Дагестан, г. Махачкала пр. Имама Шамиля, 70, ауд. 202.
С диссертацией можно ознакомиться в библиотеке ФГБОУ ВПО «Дагестанский государственный технический университет». Сведения о защите и автореферат диссертации размещены на официальном сайте ВАК Министерства образования и науки РФ http://www.vak.ed.gov.ru.
Автореферат разослан «26»____11_____2012 г.
Ученый секретарь
диссертационного совета Е.Н.Меркухин
I. ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность темы исследования. Внедрение на территории Российской Федерации и сопредельных государств, новых правил глобального плана международной организации гражданской авиации (ИКАО), увеличивающих пропускную способность воздушного пространства и соответственно рост интенсивности воздушного движения требует дополнительного повышения качества функционирования навигационного оборудования, в частности автоматического радиопеленгатора (АРП).
Обнаружение сигнала является одной из важных задач в работе АРП, от реализации которой зависят такие характеристики, как дальность пеленгования и чувствительность.
Как известно в эфире присутствуют как полезные сигналы, так и помехи. В связи с этим, АРП постоянно формирует пеленги, как на источник полезного сигнала при его наличии, так и на помеху, а задача обнаружителя заключается в определении наличия полезного сигнала и в выдаче разрешения на высвечивание пеленгов только на источник полезного сигнала.
Стоит отметить, что при натурных испытаниях не обеспечивается повторяемость результатов испытаний АРП, так как невозможно повторно обеспечить идентичность условий распространения радиоволн и характеристик подстилающей поверхности в районе размещения АРП, а также повторное нахождение воздушного судна в заданной точке пространства. При этом, в части проведения испытаний АРП, моделирование обладает заведомо более широкими возможностями.
В АРП могут быть реализованы различные методы обнаружения пеленгационного сигнала. В связи с этим, при разработке АРП возникает задача выбора оптимального из них по таким показателям, как быстродействие, вероятность ложной тревоги и др. Эта задача также решаются путем моделирования процессов обнаружения пеленгационного сигнала.
В связи с вышеизложенным исследования по разработке моделей и алгоритмов процессов обнаружения пеленгационного сигнала являются актуальной задачей.
Целью диссертационного исследования является моделирование процессов обнаружения пеленгационного сигнала в аэродромных квазидоплеровских АРП.
В соответствии с этой целью в диссертации поставлены и решены следующие задачи:
- проведен анализ и описаны методы обнаружения пеленгационного сигнала в эксплуатируемых АРП. Разработаны их математические модели и алгоритмы обнаружения пеленгационного сигнала;
- проведен анализ и систематизированы методы обнаружения пеленгационного сигнала в АРП, обработка информации, в которых осуществляется программными методами;
- разработан комплекс программ для моделирования, и выполнен сравнительный анализ методов обнаружения пеленгационного сигнала;
- разработаны и промоделированы методы и алгоритмы обнаружения пеленгационного сигнала для эксплуатируемых АРП;
- проверена корректность функционирования алгоритмов и программ путем сравнения результатов моделирования с результатами натурных экспериментов.
В качестве объекта исследования рассматриваются аэродромные квазидоплеровские АРП.
Предметом исследования являются математические модели и алгоритмы обнаружения пеленгационного сигнала в аэродромных квазидоплеровских АРП.
Методы исследований. Поставленные в работе задачи решались с применением методов теории вероятностей, математического анализа, математического и компьютерного моделирования. Для решения поставленной задачи использовались численные методы. В процессе проведенных расчетов и имитационного моделирования применялись специализированные пакеты программ MATLAB/Simulink. Разработка оригинальных программных продуктов осуществлялась в средах C++ Builder 6.0 и С++. Для проверки работоспособности приведенных в диссертационной работе моделей, алгоритмов и программ использовались методы натурного и полунатурного экспериментов. Экспериментальные исследования проводились на находящихся в эксплуатации АРП.
Научная новизна исследований состоит в следующем:
1. разработаны математические модели методов обнаружения пеленгационного сигнала в эксплуатируемых АРП, позволяющие провести их сравнительный анализ с вновь разрабатываемыми методами и алгоритмами обнаружения сигналов;
2. разработан метод и алгоритм обнаружения пеленгационного сигнала по значениям фаз на ортогональных вибраторах антенной системы, позволяющий увеличить быстродействие обнаружения сигнала;
3. разработаны метод и алгоритм обнаружения пеленгационного сигнала по амплитуде диаграммы направленности искусственно сформированной сканируемой линейной антенной решетки, обеспечивающие достоверность обнаружения пеленга даже при сильных помехах.
Достоверность научных положений подтверждается результатами компьютерного моделирования, использованием адекватных исходных данных и соответствием данных, полученных при компьютерном моделировании результатам натурных испытаний.
Теоретическая и практическая значимость результатов исследования заключается в том, что:
- проведенные исследования вносят вклад в развитие теории исследования и моделирования процессов обнаружения пеленгационного сигнала;
- на основе исследования методов обнаружения пеленгационного сигнала в эксплуатируемых АРП, разработаны математические модели и алгоритмы их функционирования;
- программная реализация математических моделей и алгоритмов обнаружения пеленгационного сигнала в АРП позволяет проводить дальнейшие исследования методов обнаружения пеленгационного сигнала;
- разработаны оригинальный метод и алгоритм обнаружения пеленгационного сигнала по значениям фаз на ортогональных вибраторах антенной системы (АС), которые в отличие, от критерия близости формы огибающей выборки фаз сигналов с АС к синусоиде, позволяют повысить быстродействие, при этом результат измерения получается в относительных единицах;
- разработаны оригинальный метод и алгоритм обнаружения пеленгационного сигнала по амплитуде диаграммы направленности искусственно сформированной сканируемой линейной антенной решетки, обеспечивающие достоверность обнаружения пеленга даже при сильных помехах, что позволяет повысить безопасность управления воздушным движением. При этом повышаются чувствительность и дальность пеленгования АРП; снимаются многие ограничения, связанные с требованиями по размещению АРП. Вновь разработанный алгоритм можно использовать также для вычисления пеленга и угла места воздушного судна, что в целом способствует повышению помехоустойчивости АРП.
Результаты внедрения. Результаты диссертационной работы внедрены в опытно конструкторских работах, выполненных в ОАО НИИ «Сапфир»:
- «Разработка многоканального автоматического радиопеленгатора и средств радиосвязи, встраиваемых в РСП» (шифр «Низовье АРП-РС»);
- «Разработка радиопеленгационной системы для автоматического оповещения о несанкционированном доступе в подвижных и неподвижных охраняемых объектах» (шифр «Страж»).
Метод обнаружения пеленгационного сигнала по амплитуде диаграммы направленности искусственно сформированной сканируемой линейной антенной решетки будет внедрен в ОАО НИИ «Сапфир» при разработке перспективных АРП.
Апробация работы. Основные положения диссертации докладывались на:
- научно-технических конференциях в ФГБОУ ВПО ДГТУ в 2002 – 2012 годах;
- международной научно-технической конференции, посвященной 80-летию гражданской авиации России «Гражданская авиация на современном этапе развития науки, техники и общества» в Московском государственном техническом университете гражданской авиации в 2003 году;
- заседаниях научно-технического Совета ОАО НИИ «Сапфир» в 2003 - 2010 годах;
- всероссийской научно-технической конференции «Современные информационные технологии в управлении» ДГТУ в 2003, 2005, 2007, 2009 и 2010 годах;
- на 15-м Юбилейном Международном молодежном форуме «Радиоэлектроника и молодежь в ХХІ веке» в Харьковском национальном университете радиоэлектроники в 2011 году.
Публикации. По материалам диссертации опубликовано 13 печатных работ из них 2 в научных журналах и изданиях, включенных в перечень рекомендованных ВАК.
Объем и структура диссертации. Работа состоит из введения, трех глав, заключения, списка литературы из 63 наименований и приложений. Основная часть изложена на 113 листах машинописного текста, содержит 38 рисунков, 5 таблиц и 7 приложений на 38 листах.
II. КРАТКОЕ СОДЕРЖАНИЕ ДИССЕРТАЦИИ
Во введении дана общая характеристика работы, обоснована ее актуальность, определены цели и задачи исследований.
В первой главе «Предмет исследования и сущность научной задачи» приведено краткое описание работы АРП и обнаружителя как объектов моделирования.
Во второй главе «Моделирование работы обнаружителей пеленгационного сигнала, реализованные в эксплуатируемых АРП аппаратными средствами» приведен анализ процессов обнаружения пеленгационного сигнала в: АРП-1, АРП-4, АРП-5, АРП-7С, АРП-75, АРП-80К, АРП-АС и АРП-85.
Все радиопеленгаторы, разработанные до 90-х годов, реализованы аппаратными методами, причем, почти во всех из них используются различные методы обнаружения пеленгационного сигнала.
Для сравнительного анализа различных методов обнаружения пеленгационного сигнала, требуется разработка математических моделей и алгоритмов работы АРП, реализованных аппаратными методами.
В первых отечественных ультракоротковолновых автоматических радиопеленгаторах АРП-1, АРП-4 и АРП-5, предназначенных для определения пеленга самолета с работающей самолетной УКВ радиостанцией типа РСИУ-3М обнаружитель отсутствует.
В квазидоплеровском автоматическом радиопеленгаторе АРП-7С обнаружитель пеленгационного сигнала реализован аппаратными средствами с использованием амплитудного метода обнаружения. В АРП-7С логический сигнал «НАЛИЧИЕ ПЕЛЕНГА» формируется при появлении на его входе сигнала с уровнем больше заданного порога. Такое построение обнаружителя сигнала при фазовой обработке информации является неоптимальным. Оно приводит либо к уменьшению чувствительности (при большом пороге), либо к недостаточной помехозащищенности, когда выбран малый порог.
В радиопеленгаторах АРП-75 обнаружение пеленгационного сигнала реализовано аналогично квазидоплеровскому автоматическому радиопеленгатору АРП-7С. В диссертационной работе приводятся математические модели и блок-схемы алгоритмов обнаружения пеленгационных сигналов в АРП-7С и АРП-75.
В АРП-80К реализован фазовый метод обнаружения сигнала, в результате чего дальность пеленгования в квазидоплеровском АРП увеличилась на (15 – 20) %.
Принцип работы фазового обнаружителя основан на выявлении сигнала с постоянным периодом ![]() (где
(где ![]() - частота коммутации вибраторов) изменения его фазы, т.е. если фазы сигналов со всех вибраторов антенной системы (АС) имеют значения, не выходящие за заданный порог и повторяющиеся с периодом
- частота коммутации вибраторов) изменения его фазы, т.е. если фазы сигналов со всех вибраторов антенной системы (АС) имеют значения, не выходящие за заданный порог и повторяющиеся с периодом ![]() , то принимается гипотеза «НАЛИЧИЕ ПЕЛЕНГА», иначе «ПЕЛЕНГА НЕТ». В диссертационной работе приводится блок-схема алгоритма обнаружения пеленга в АРП-80К.
, то принимается гипотеза «НАЛИЧИЕ ПЕЛЕНГА», иначе «ПЕЛЕНГА НЕТ». В диссертационной работе приводится блок-схема алгоритма обнаружения пеленга в АРП-80К.
В АРП-7С, АРП-75 и АРП-80К определение пеленга происходит по одной выборке сигнала с антенной решетки, в связи с этим ухудшается помехоустойчивость.
АРП-АС стал следующим, разработанным квазидоплеровским АРП, предназначенным для работы в составе автоматизированной системы управления воздушным движением. Здесь, частотно модулированный (ЧМ) сигнал (частота несущей 5550 Гц, частота модулирующего сигнала 104 Гц) с шумами приемника поступает на детектор ЧМ. В детекторе ЧМ проводится фильтрация сигнала от шумов приемника и детектирование, т.е. на выходе детектора ЧМ имеется сигнал с частотой 104 Гц. В детекторе ЧМ реализована схема обнаружения сигнала.
Для осуществления фазового детектирования синусоидального сигнала (т.е. измерения постоянных напряжений пропорциональных косинусу фазы и синусу фазы) на плату фазового детектора с генератора опорных сигналов (ГОС) поступают сигналы «Опорное 0о» и «Опорное 90о», имеющие фазовый сдвиг один относительно другого 90о:
 (1)
(1)
и
 , (2)
, (2)
где
![]() - радиус антенной системы;
- радиус антенной системы;
![]() - длина волны пеленгуемого сигнала;
- длина волны пеленгуемого сигнала;
![]() - угол места;
- угол места;
![]() – номер вибратора в АС от 1 до N;
– номер вибратора в АС от 1 до N;
N – количество элементов в АС;
![]() - пеленг на воздушное судно.
- пеленг на воздушное судно.
В фазовом детекторе производится выделение сигналов «север-юг» и «запад-восток», которые определяются выражениями:
 (3)
(3)
 (4)
(4)
В выражениях (3) и (4) сигналы
![]() и
и
![]()
являются сигналами удвоенной частоты и при прохождении через полосовой фильтр не пропускаются. В связи, с чем на выходах фазовых детекторов получим:
![]() (5)
(5)
и
![]()
![]() (6)
(6)
В фазовом детекторе напряжения (5 и 6) складываются:
![]()
Результат суммирования сравнивается с заданным порогом. Если К2 находится в границах эталонного диапазона амплитуд, то принимается гипотеза «НАЛИЧИЕ ПЕЛЕНГА», иначе «ПЕЛЕНГА НЕТ». В диссертационной работе приводится блок-схема алгоритма обнаружения пеленга в АРП-АС.
Основным недостатком такого обнаружителя является уменьшение чувствительности пеленгования в нижней части диапазона вследствие уменьшения индекса фазовой модуляции.
Принцип работы обнаружителя пеленгационного сигнала в АРП-85 заключается, в том, что при выходе воздушного судна на связь на выходе радиостанции появляется устойчивый сигнал частотой 5550 Гц. Этот сигнал поступает с АС со скоростью переключения вибраторов 43,4 Гц, что дает возможность произвести подсчет 128 периодов частоты 5550 Гц с точностью ± 2 периода за время полного цикла переключения вибраторов. При этом выход за пределы допуска 128 ± 2 периода тактовой частоты 5550 Гц свидетельствует о том, что пеленг отсутствует или он неустойчив.
В диссертационной работе приводится блок-схема алгоритма обнаружения сигнала в АРП-85.
В третьей главе «Моделирование работы обнаружителей пеленгационного сигнала, реализованных программными средствами» приведен анализ процессов обнаружения пеленгационного сигнала в АРП «Платан».
АРП «Платан» был первым отечественным радиопеленгатором, в котором обнаружение пеленгационного сигнала реализовано программными средствами. Обнаружение пеленгационного сигнала в АРП «Платан» осуществляется по четырем основным критериям: по стабильности фаз сигналов с вибраторов АС, по амплитуде восстановленной фазовой огибающей сигнала частоты 43,4 Гц, по близости формы огибающей к синусоиде и устойчивости значения пеленга.
При фазовом обнаружении сравниваются значения фаз сигналов вибраторов текущего цикла измерения, и предыдущего. Разброс разностей фаз сигналов вибраторов между циклами коммутации АС не должен превышать наперед заданного порога, то есть:
![]()
где ![]() – номер цикла коммутации АС;
– номер цикла коммутации АС;
i – номер вибратора в АС.
В АРП «Платан»![]() не должно превышать 300 для четырнадцати вибраторов из шестнадцати.
не должно превышать 300 для четырнадцати вибраторов из шестнадцати.
При обнаружении по амплитуде восстановленной фазовой огибающей определяется сумма квадратов ортогональных составляющих. Вычисленная амплитуда сравнивается с эталонным диапазоном амплитуд. Обнаружитель срабатывает при попадании вычисленного значения амплитуды огибающей в эталонный диапазон.
При этом, в начале вычисляются значения напряжений по формулам (1) и (2), затем квадрат амплитуды![]() восстановленной огибающей:
восстановленной огибающей:
![]() .
.
При обнаружении по критерию близости формы огибающей выборки фаз сигналов с АС к синусоиде фаза сигнала кольцевого вибратора, измеренная относительно фазы центрального вибратора, определяется выражением:
![]() (7)
(7)
Максимальная девиация фазы при ![]() =0 составляет:
=0 составляет:
![]() .
.
Номер k -го ортогонального i-му вибратору может быть определен по выражению:
 ,
,
причем, при k=0, принимается значение k=N.
Фаза ортогонального вибратора относительно i - го вибратора определяется выражением:
![]() (8)
(8)
тогда
 (9)
(9)
Реально равенство (9) не будет строгим из-за наличия шумов и фазовой неидентичности сигналов с вибраторов кольцевой АС.
Тогда справедливо:
![]()
где ![]() - ошибка измерения.
- ошибка измерения.
В связи с тем, что ![]() - величина неизвестная, вычисляем массив фаз
- величина неизвестная, вычисляем массив фаз ![]() для N вибраторов и производим усреднение по их количеству, получаем
для N вибраторов и производим усреднение по их количеству, получаем ![]() :
:
 .
.
Поскольку условие (9) выполняется независимо от значения пеленга ![]() , оно взято за основу для построения обнаружителя.
, оно взято за основу для построения обнаружителя.
Рассматривая ![]() как случайную величину, определим в качестве меры близости дисперсию по формуле:
как случайную величину, определим в качестве меры близости дисперсию по формуле:
 .
.
При этом критерий обнаружения имеет вид:
![]()
где ![]() – порог обнаружения, определяющий уровни ложной тревоги и пропуска сигнала.
– порог обнаружения, определяющий уровни ложной тревоги и пропуска сигнала.
Обнаружение по устойчивости значения пеленга действует только в случае, если до этого в текущем и предыдущем результатах обнаружители не выставляли гипотезу «ПЕЛЕНГА НЕТ». В этом случае происходит сравнение текущего значения пеленга с предыдущим, разность которых не должна превышать значения 30, в этом случае обнаружитель выставляет гипотезу «НАЛИЧИЕ ПЕЛЕНГА».
В результате проведенного анализа методов обнаружения пеленгационного сигнала, реализованных в АРП-75, АРП-80К и АРП «Платан», было определено, что в случае, если амплитуды основного и отраженного сигналов будут приблизительно равны, то обнаружители сигналов выставят гипотезу «ПЕЛЕНГА НЕТ». В диссертационной работе приводятся блок-схемы алгоритмов обнаружения пеленга в АРП «Платан» по всем критериям.
В работе предложены оригинальные методы обнаружения пеленгационного сигнала:
1. По значениям фаз на ортогональных вибраторах АС.
Принцип обнаружения пеленгационного сигнала по значениям фаз на ортогональных вибраторах АС заключается в том, что отношение суммы квадратов фаз для любых двух пар ортогонально расположенных вибраторов (в которых разрешена фазовая неоднозначность) равна единице.
По этому методу, в соответствии с (9), находим ![]() для двух пар ортогонально расположенных вибраторов. Вычисляем отношение
для двух пар ортогонально расположенных вибраторов. Вычисляем отношение ![]() для выбранных пар ортогональных вибраторов:
для выбранных пар ортогональных вибраторов:
 (10)
(10)
При этом, в идеальном случае (когда фазовые неидентичности вибраторов равны нулю и отсутствуют помехи) отношение (10) должно быть равно 1. На практике из-за наличия помех это отношение не равно 1. В связи с этим выражение
 (11)
(11)
может быть использовано для оценки наличия пеленга.
Если левая часть выражения (11) не больше заданного порога U0, то принимается гипотеза «НАЛИЧИЕ ПЕЛЕНГА», в противном случае «ПЕЛЕНГА НЕТ».
Отличие данного метода от критерия близости формы огибающей выборки фаз сигналов с АС к синусоиде заключается в отсутствии необходимости вычисления массива фаз ![]() для N вибраторов и усреднение по их количеству, что сокращает время обнаружения пеленга, причем результат измерения получается в относительных единицах.
для N вибраторов и усреднение по их количеству, что сокращает время обнаружения пеленга, причем результат измерения получается в относительных единицах.
В диссертационной работе приводится блок-схема алгоритма обнаружения пеленгационного сигнала по значениям фаз на ортогонально расположенных вибраторах АС.
2. По амплитуде диаграммы направленности искусственно сформированной сканируемой линейной антенной решетки.
Суть данного метода заключается в том, что сигнал на выходе радиоприемного устройства (рис. 1) квазидоплеровского автоматического радиопеленгатора (АРП) описывается выражением
 ,
,
при этом k=i если  ,
,
где A – амплитуда пеленгуемого сигнала;
k – номер временного интервала, коммутации i –го элемента АС;
i – целое число из циклически изменяющегося ряда чисел от 1 до N.
При этом, в случае присутствия отражающих предметов, к основному сигналу на вибраторе будут добавляться отраженные сигналы, которые будут складываться векторно с основным сигналом:
![]() , где
, где
 ,
,
 ,
,
где ![]() соответственно амплитуда прямого сигнала;
соответственно амплитуда прямого сигнала;

![]() - коэффициент отражения местного предмета;
- коэффициент отражения местного предмета;
![]() соответственно азимут и угол места прямого и отраженного сигналов;
соответственно азимут и угол места прямого и отраженного сигналов;
e1(t) и e2(t) – соответственно прямой и отраженный сигналы.
Если сформировать опорный сигнал вида:
 ,
,
где m – номер шага сканирования по пеленгу,
j - номер шага сканирования по углу места,
z - номер шага сканирования по амплитуде,
А, ![]() и - соответственно шаг сканирования по амплитуде, углу места и пеленгу, и сканировать его, то при m равном 1 и 2 будут наблюдаться максимумы диаграммы направленности.
и - соответственно шаг сканирования по амплитуде, углу места и пеленгу, и сканировать его, то при m равном 1 и 2 будут наблюдаться максимумы диаграммы направленности.
При значениях m и ![]() равных 1,
равных 1,![]() и 2,
и 2,![]() будут иметь место максимумы диаграммы направленности.
будут иметь место максимумы диаграммы направленности.
Для подавления боковых составляющих, кривая диаграммы направленности АС возводится в квадрат:
![]()
Обнаружитель выставляет гипотезу «НАЛИЧИЕ ПЕЛЕНГА» при превышении максимумов диаграмм направленности прямого или отраженного сигналов уровня заданного порога.
Проведенные исследования показали, что одновременное сканирование по фазе, углу места и амплитуде требует значительных временных затрат, что приводит к уменьшению быстродействия АРП. В связи с этим, достаточно сканировать опорный сигнал по фазе. Это приводит к несовпадению местоположения вершин диаграммы направленности с азимутом 1 и 2. Качественная же картина при этом сохраняется. На рисунках 2 и 3 приведены результаты моделирования обнаружителей сигналов реализованных на фазовом принципе формирования диаграммы направленности.
Разработанный алгоритм и блок схема обнаружителя пеленгационного сигнала, обеспечивает работоспособность АРП при сильных помехах.
В лаборатории ОАО НИИ «Сапфир» также были проведены сравнительные испытания методов обнаружения. При этом для устранения влияния всевозможных случайных факторов на результаты эксперимента испытания проводились на одном и том же образце АРП с перезагрузкой программ обработки пеленгационной информации.

Рисунок 2 - Пример обнаружения пеленгационного сигнала по амплитуде диаграммы направленности искусственно сформированной сканируемой линейной антенной решетки (амплитуда полезного сигнала 0.4 единицы, пеленг на источник излучения 600, коэффициент отражения от местного предмета 0.5, пеленге на источник отраженного сигнала 1200, девиация фазы 5.9, заданный порог 160000 единиц)
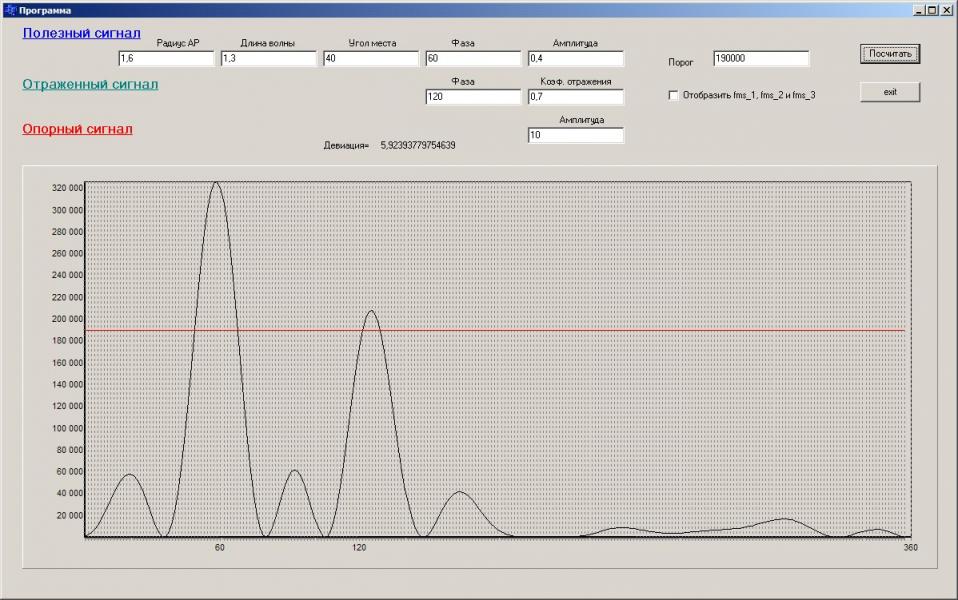
Рисунок 3 - Пример обнаружения пеленгационного сигнала по амплитуде диаграммы направленности искусственно сформированной сканируемой линейной антенной решетки (амплитуда полезного сигнала 0.4 единицы, пеленг на источник излучения 600, коэффициент отражения от местного предмета 0.7, пеленг на источник отраженного сигнала 1200, девиация фазы 5.9, заданный порог 190000 единиц).
В заключении приведены основные результаты, полученные в ходе исследования:
Размещение АРП на ограниченной территории совместно с другими средствами радиотехнического обеспечения полетов и ужесточение требований к основным параметрам приводит к необходимости поиска новых цифровых методов обнаружения пеленгационного сигнала.
Необходимость создания АРП с улучшенными параметрами, нечувствительных к причинам, вызывающим ошибки обнаружения пеленгационного сигнала, в том числе и из-за наличия местных предметов показывает, что обнаружитель сигналов необходимо строить по принципу накопления выборок и по ней осуществлять процедуру обнаружения с заданной вероятностью ложной тревоги.
При разработке АРП и их испытаниях появляется задача проведения анализа и сравнения различных вариантов реализации методов обнаружения пеленгационного сигнала. Все радиопеленгаторы, разработанные до 90-х годов, реализованы аппаратными методами, причем, почти во всех из них используются различные методы обнаружения пеленгационного сигнала. В связи с этим, требуется разработка математических моделей и алгоритмов работы АРП, реализованных аппаратными методами.
Разработанные алгоритмы и математические модели позволяют проводить исследования, с целью определения их преимуществ и недостатков и на этой основе определить дальнейшие пути усовершенствования обнаружителей пеленгационного сигнала.
Практическая реализуемость математических моделей обнаружения пеленгационного сигнала, корректности их функционирования подтверждается их внедрением в эксплуатируемых АРП.
Предложенные оригинальный метод и алгоритм обнаружения пеленгационного сигнала по амплитуде диаграммы направленности искусственно сформированной сканируемой линейной антенной решетки, позволяет снять многие ограничения связанные с требованиями по размещению АРП, повысить достоверность обнаружения пеленга даже при сильных помехах, и эти же алгоритмы могут быть использованы для вычисления пеленга и угла места воздушного судна.
Алгоритмы и программы, разработанные в диссертационной работе, нашли практическую реализацию в разработках ОАО НИИ «Сапфир», а также будут использованы при разработке программного обеспечения на следующих модификациях АРП.
Практическая реализация предложенных методов и алгоритмов, позволило улучшить такие показатели качества функционирования АРП, как чувствительность и дальность пеленгования, а также позволяет обеспечивать работоспособность АРП при сильных помехах, что в конечном итоге способствует повышению безопасности управления воздушным движением.
В приложении приведены акты внедрения результатов диссертационной работы, а также тексты программ.
Основные положения и результаты диссертационного исследования опубликованы в следующих работах:
I. Статьи опубликованные в научных журналах и изданиях, определенных ВАК:
- Аджигитов Д.Р., Дзюба А.П., Мамедов Л.К. Обеспечение работоспособности аэродромных квазидоплеровских автоматических радиопеленгаторов (АРП) при сложных условиях размещения // Транспортное дело России. - 2006. – №10.-Ч.2.-С.13-14. (0,25/0,1 п.л.);
- Асланов Г.К., Мамедов Л.К., Магомедов К.М. Математические модели процесса вычисления пеленга в аэродромных квазидоплеровских автоматических радиопеленгаторах// Научно-технические ведомости СПбГПУ. – 2008. – N2. – С.267-272. (0,62/0,21 п.л.);
II. Статьи, опубликованные в других научных журналах и изданиях.
- Мамедов Л.К. Алгоритм обнаружения пеленгационного сигнала // Современные информационные технологии в управлении: тезисы докладов Всероссийской научно-технической конференции. - Махачкала: ДГТУ, 2003. – С.96 - 97. (0,09 п.л.);
- Мамедов Л.К. Математическое моделирование процессов обнаружения пеленгационного сигнала // Современные информационные технологии в проектировании, управлении и экономике: сборник научных трудов. – Махачкала: ДГТУ, 2005. - Ч.1. – С.59-61. (0,12 п.л.);
- Мамедов Л.К. Анализ методов обнаружения сигналов в эксплуатируемых АРП // Сборник тезисов докладов XXVI итоговой научно-технической конференции преподавателей, сотрудников, аспирантов и студентов ДГТУ, 21 – 23 апреля 2005. – Махачкала: ДГТУ, 2005. – С.63-64. (0,12 п.л.);
- Мамедов Л.К. Модулятор промежуточной частоты // Электронные системы и устройства на основе элементной базы компании Analog devices: сборник статей. – Махачкала: ДГТУ, 2006. – С.20-30. (1,4 п.л.);
- Мамедов Л.К., Дзюба А.П., Гасанов О.И. Моделирование обнаружения сигнала в автоматическом радиопеленгаторе АРП-75 // Сборник тезисов докладов XXVIII итоговой научно-технической конференции преподавателей, сотрудников, аспирантов и студентов ДГТУ. Технические науки. – Махачкала: ДГТУ, 2007. –Ч.I. - С.85. (0,04/0,01 п.л.);
- Гасанов О.И., Мамедов Л.К. Возникновение аномальных ошибок АРП из-за наличия интерференционных минимумов диаграммы направленности антенной системы // Сборник тезисов докладов XXX итоговой научно-технической конференции преподавателей, сотрудников, аспирантов и студентов ДГТУ. Технические науки. – Махачкала: ДГТУ, 2009. – Ч.1. – С.97. (0,06/0,03 п.л.);
- Асланов Г.К., Гасанов О.И., Мамедов Л.К. Сравнение различных методов восстановления пеленгационного сигнала // Современные информационные технологии в проектировании, управлении и экономике: материалы IV Всероссийской конференции по актуальным проблемам внедрения и развития сектора IT-технологий, 22-25 сентября 2009 г. - Махачкала: ДГТУ, 2009. - С. 72-80. (0,4/0,17 п.л.);
- Мамедов Л.К., Асланов Г.К., Гасанов О.И. Моделирование процесса обнаружения пеленгационного сигнала в эксплуатируемых аэродромных квазидоплеровских автоматических радиопеленгаторах (АРП) // Современные проблемы математики и смежные вопросы: материалы международной конференции «Мухтаровские чтения». – Махачкала: ДГТУ, 2010. – С.118-123. (0,25/0,1 п.л.);
- Асланов Г.К., Мамедов Л.К. Влияние метеорологических факторов на точность пеленгования автоматических радиопеленгаторов // Современные информационные технологии в проектировании, управлении и экономике: материалы пятой Всероссийской конференции по актуальным проблемам внедрения и развития сектора IT-технологий, 29 – 30 сентября 2010 г.– Махачкала: ДГТУ, 2010. – С.45-54. (0,56/0,28 п.л.);
- Асланов Г.К., Мамедов Л.К. Обнаружение пеленгационного сигнала методом формирования диаграммы направленности // Современные информационные технологии в проектировании, управлении и экономике: материалы шестой Всероссийской конференции по актуальным проблемам внедрения и развития сектора IT-технологий, 28 – 29 сентября 2011 г. – Махачкала: ДГТУ, 2011. – С.39-42. (0,2/0,1 п.л.);
- Асланов Г.К., Мамедов Л.К. Формирование диаграммы направленности с помощью корреляционной обработки //Радиоэлектроника и молодежь в ХХІ веке: материалы XV Международного молодежного форума, 18-20 апреля 2011 г. – Харьков: ХНУРЭ, 2011. – Т.3. – С.181-182. (0,12/0,06 п.л.).