

Пуско-регулирующее устройство на базе статического компенсатора реактивной мощности
На правах рукописи
СМИРНОВ МИХАИЛ ИВАНОВИЧ
ПУСКО-РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО НА БАЗЕ СТАТИЧЕСКОГО КОМПЕНСАТОРА РЕАКТИВНОЙ МОЩНОСТИ
Специальность 05.09.01. "Электромеханика и электрические аппараты"
Автореферат
диссертации на соискание ученой степени
кандидата технических наук
МОСКВА 2007
Работа выполнена в Государственном Образовательном Учреждении Высшего Профессионального Образования Московском Энергетическом Институте (Техническом Университете) на кафедре Электрических и Электронных аппаратов
| Научный руководитель - | доктор технических наук, профессор Розанов Юрий Константинович |
| Официальный оппонент - | доктор технических наук, профессор Малиновский Александр Евгеньевич кандидат технических наук, профессор Москаленко Владимир Валентинович |
| Ведущее предприятие - | Концерн ООО «Русэлпром» |
Защита состоится «25___» мая 2007 г.
на заседании диссертационного совета Д 212.157.15 при ГОУВПО МЭИ (ТУ)
в аудитории Е-205 в 13 час. 00 мин.
по адресу: 111250, Москва, Красноказарменная ул., д.13.
С диссертацией можно ознакомиться в библиотеке ГОУВПО МЭИ (ТУ).
Отзывы в двух экземплярах, заверенные печатью учреждения, просим направлять по адресу: 111250, Москва, Красноказарменная ул., д. 14, ученый совет при ГОУВПО МЭИ (ТУ).
Автореферат разослан «___» ______________ 2007 г.
Ученый секретарь
диссертационного совета Д 212.157.15.
к.т.н., доц. Соколова Е.М.
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность работы. При питании двигателя от сети ограниченной мощности в процессе пуска из-за большого значения пускового тока уменьшается напряжение питания двигателя. Это приводит к уменьшению перегрузочной способности двигателя, что негативно сказывается на эффективности и надежности работы машины. В случае пуска двигателя от сети ограниченной мощности широкое распространение получили устройства пуска на базе конденсаторных компенсаторов реактивной мощности. Однако их применение ограничено из-за невысокой надёжности работы, обусловленной возможностью возникновения резонансных явлений, а также из-за большой стоимости и габаритов, обусловленных использованием неполярных конденсаторов.
В последнее время большое внимание уделяется проблеме энергосбережения. Возрастающая потребность общества в энергии может удовлетворяться как за счет увеличения производства энергии, так и за счет ее рационального использования. Поэтому необходимо создание нового вида ПРУ с улучшенными технико-экономическими показателями, повышающее энергоэффективность работы двигателя в установившемся режиме работы за счёт компенсации его реактивной мощности.
Цель работы. Целью работы является создание нового вида ПРУ для асинхронного двигателя с управляемой мощностью, подаваемой на двигатель в процессе пуска от накопителя электроэнергии, с улучшенными технико-экономическими показателями.
Для достижения цели работы необходимо было решить следующие научно-технические задачи:
- создание схемотехнических решений и принципиальных схем нового вида ПРУ.
- разработка алгоритмов управления ПРУ для различных режимов работы.
- разработка инженерных методик расчёта силовых элементов ПРУ.
Научная новизна.
- разработан новый вид ПРУ на основе элементов силовой электроники;
- разработаны принципиальные схемы нового вида ПРУ;
- разработаны принцип построения и алгоритмы управления ПРУ, и их программная реализация на промышленном микроконтроллере.
Методы исследований, применяемые в диссертационной работе: методы теории электрических цепей, методы теории автоматического управления, математическое моделирование ПРУ и асинхронного двигателя в программном комплексе Мatlab, физическое моделирование ПРУ.
Основные положения, выносимые на защиту:
- схемотехнические решения и принципиальные схемы нового вида ПРУ.
- математическая модель силовой части и системы управления ПРУ.
- алгоритмы управления и программы ПРУ.
- инженерные методики расчёта силовых элементов ПРУ.
Практическая ценность работы заключается в следующем:
- улучшение условий запуска двигателя, питающегося от сети ограниченной мощности.
- уменьшение величины пускового тока при увеличении пускового момента двигателя.
- повышение коэффициента мощности питания двигателя.
Практическое применение результатов работы:
Материалы работы были использованы при проведении НИР с «РАО ЕС» по созданию систем управления статических компенсаторов реактивной мощности и активных фильтров.
Публикации по теме работы. По теме диссертации опубликовано 3 печатные работы, получен патент на изобретение №2262180 от 10 октября 2005г. «Устройство пуска асинхронного двигателя».
Структура и объем работы. Диссертационная работа состоит из введения, семи глав, заключения и списка литературы и имеет объем 158 страниц, 82 рисунка, 4 таблицы и приложение.
СОДЕРЖАНИЕ РАБОТЫ
Во введении обоснована актуальность исследования и разработки. Описаны проблемы, связанные с пуском асинхронного двигателя с короткозамкнутым ротором от сети неограниченной и ограниченной мощности. Обусловлена актуальность разработки пуско-регулирующего устройства (ПРУ) с улучшенными техническими характеристиками.
В первой главе приведено описание существующих устройств и методов пуска асинхронного двигателя. Указаны достоинства и недостатки использующихся методов и устройств пуска. Указана актуальность проблемы повышения энергоэффективности работы асинхронного двигателя. Описано устройство пуска на базе конденсаторов, включаемых параллельно статорным обмоткам двигателя. Приведены недостатки этого устройства пуска и компенсации реактивной мощности. В этой связи, была поставлена задача создания нового вида ПРУ с улучшенными технико-экономическими показателями. В установившемся режиме работы двигателя устройство должно повышать энергоэффективность двигателя путём компенсации его реактивной мощности. Выявлена основная область применения нового вида ПРУ – пуск двигателя от сети ограниченной мощности, с целью уменьшения пускового тока, потребляемого из сети и увеличения перегрузочной способности двигателя в пусковом и статическом режимах работы.
Во второй главе описана конструкция и принцип действия ПРУ на базе компенсатора мощности сети.
Статический компенсатор реактивной мощности является базовым элементом ПРУ. Принцип работы ПРУ заключается в компенсации реактивной мощности двигателя в процессе пуска.
Преобразователь напряжения компенсатора выполнен по схеме преобразователя переменного/постоянного тока с накопителем энергии на стороне постоянного тока. Подключение преобразователя к сети показано на рис.1, а). Задачей системы управления ПРУ является измерение токов нагрузки (iН_a, iН_b, iН_c) или сети (iС_a, iС_b, iС_с), и вычислении тока задания компенсатора для создания необходимого потока мощности компенсации. Преобразователь выполнен на полностью управляемых ключевых элементах, поэтому он способен работает в четырёх квадрантах (рис.1, б), генерируя в сеть ток первой гармоники, отстающий или опережающий по фазе напряжение сети в точке подключения. На рисунке u - фазное напряжение сети, i - ток фазы преобразователя. Режим выпрямления - квадранты I и IV, режим инвертирования - квадранты II и III.
 | 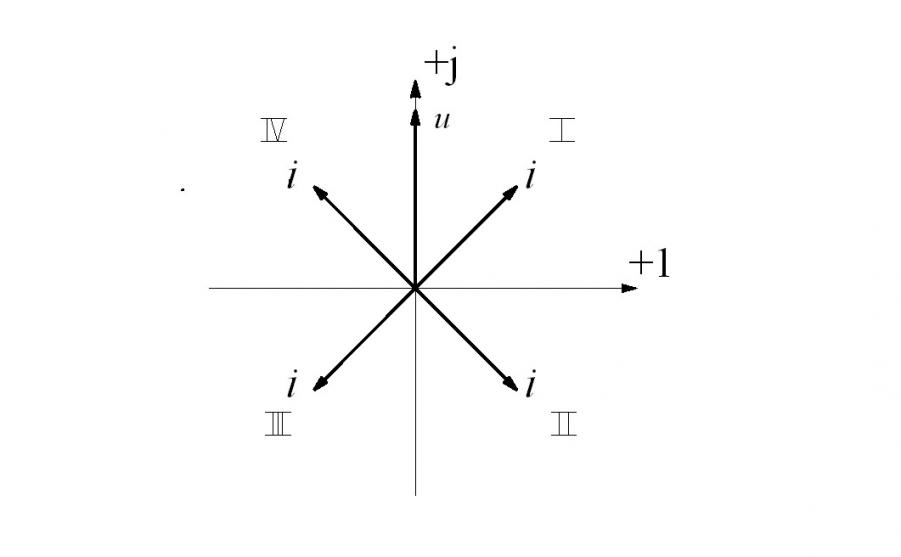 |
Рис.1. Устройство и принцип действия компенсатора мощности сети
а) подключение 4-х квадрантного преобразователя к трёхфазной сети;
б) четыре квадранта работы преобразователя.
Принцип действия компенсатора мощности сети основан на генерировании тока, отстающего или опережающего по фазе напряжение сети в точке подключения компенсатора, что эквивалентно потреблению или генерированию реактивной мощности, в результате чего достигается компенсация реактивной мощности сети. При наличии энергоёмкого накопителя на стороне постоянного тока, компенсатор способен генерировать в сеть или потреблять из неё активную мощность. Могут использоваться накопители различных типов, такие как: аккумуляторная батарея, батарея электролитических конденсаторов или батарея конденсаторов нового типа – молекулярных конденсаторов, имеющих большую энергоёмкость. При наличии накопителя достаточно большой энергоёмкости, ПРУ является устройством способным обмениваться с сетью мощностью различного характера. Это позволяет ПРУ управлять пуском асинхронного двигателя генерируя мощность различного характера – как реактивную для компенсации реактивной мощности двигателя, так и активную для частичного или полного питания двигателя.
Упрощённая структурная схема системы управления ПРУ показана на рис.2. Асинхронный двигатель подключается к ПРУ со стороны «нагрузка» (рис.2).
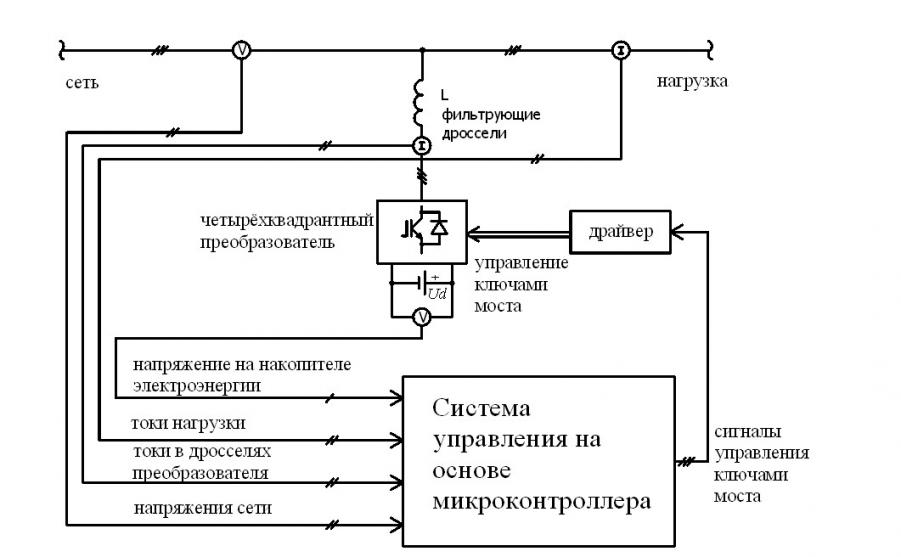
Рис.2. Упрощённая структурная схема системы управления ПРУ
Преобразователь напряжения компенсатора может иметь различное схемотехническое исполнение в зависимости от его мощности, а также напряжения сети к которой он подключён. В компенсаторах небольшой мощности и напряжения могут использоваться следующие топологии схем преобразователей: двухуровневая трёхфазная, трёхуровневая трёхфазная, трёхфазная топология, состоящая из трёх однофазных (в иностранной литературе «Н»-схем), с общим накопителем энергии на стороне постоянного тока. Благодаря использованию статического компенсатора реактивной мощности, разрабатываемое ПРУ имеет ряд преимуществ по сравнению с аналогами (устройство пуска на базе неполярных конденсаторов, включённых параллельно статорным обмоткам двигателя):
- энергия на пуск двигателя может расходоваться из накопителя устройства пуска, что делает возможным пуск с потреблением минимального количества энергии от сети или же осуществлять пуск в автономном режиме работы (без потребления энергии от сети);
- отсутствие возможности возникновения резонансных явлений;
- отсутствие возможности возникновения ударных коммутационных сверхтоков, так как принцип регулирования мощности статического компенсатора обуславливает плавность и точность компенсации реактивной мощности двигателя;
- возможно уменьшить номинальную мощность ПРУ за счёт его способности работать с некоторой перегрузкой в процессе пуска;
- в качестве накопителя устройства может использоваться полярный электролитический конденсатор, который дешевле и имеет меньшие габариты по сравнению с неполярным конденсатором;
В третьей главе описана система управления ПРУ. Так как базовым элементом ПРУ является статический компенсатор реактивной мощности, то в третьей главе приведено описание и сравнение двух наиболее часто использующихся методов управления статическим компенсатором. Это метод «мгновенной мощности» (или «p-q теория») и метод управления в синхронной системе координат, основанный на прямом и обратном преобразовании Парка-Горева.Функционально система управления ПРУ разделена на две подсистемы. Задачей первой является вычисление значений активной и реактивной составляющих мощности, которые компенсатор должен генерировать в сеть для компенсации активной и реактивной мощности нагрузки. Задачей второй подсистемы является управление переключением ключевых элементов преобразователя напряжения для создания заданного потока мощности. Преимуществом использования теории «мгновенной мощности» является отсутствие необходимости использования системы синхронизации сигналов токов задания компенсатора с напряжением сети, так как это осуществляется автоматически. Это обеспечивает хорошее качество управления мощностью компенсатора в динамических режимах работы. Это особенно важно при работе с сетью ограниченной мощности, когда изменение мощности компенсатора приводит к изменению фазы напряжения сети в точке подключения.
Метод «мгновенной мощности» основан на вычислении мощности нагрузки с использованием токов и напряжений нагрузки в стационарной ортогональной системе координат. Переход к этой системе координат от трехфазной системы координат осуществляется посредством преобразования Кларка (abc- преобразование) (1):
 (1)
(1)
где ![]() и
и ![]() - проекции пространственного вектора тока на оси двухфазной стационарной системы координат,
- проекции пространственного вектора тока на оси двухфазной стационарной системы координат, ![]() ,
, ![]() ,
, ![]() - проекции пространственного вектора тока на оси трёхфазной системы координат.
- проекции пространственного вектора тока на оси трёхфазной системы координат.
Вводятся понятия действительной ![]() и мнимой
и мнимой ![]() мгновенных мощностей в
мгновенных мощностей в ![]() координатах:
координатах:
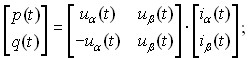 (2)
(2)
Среднее значение действительной составляющей мгновенной мощности ![]() (2) соответствует активной мощности в традиционном представлении. В то же время, мнимая мгновенная мощность
(2) соответствует активной мощности в традиционном представлении. В то же время, мнимая мгновенная мощность ![]() не соответствует традиционной реактивной мощности. Поскольку составляющие мгновенных мощностей
не соответствует традиционной реактивной мощности. Поскольку составляющие мгновенных мощностей ![]() и
и ![]() , соответствующие активной и реактивной мощности, являются величинами постоянными (или медленно меняющимися в динамических режимах работы), то упрощается их выделение. Постоянные величины
, соответствующие активной и реактивной мощности, являются величинами постоянными (или медленно меняющимися в динамических режимах работы), то упрощается их выделение. Постоянные величины ![]() и
и ![]() выделяются посредством информационных фильтров низких частот (ФНЧ) с минимальной фазовой задержкой и ослаблением выделяемой составляющей входного сигнала (рис.3). Эти значения являются мощностью задания компенсатора ПРУ (
выделяются посредством информационных фильтров низких частот (ФНЧ) с минимальной фазовой задержкой и ослаблением выделяемой составляющей входного сигнала (рис.3). Эти значения являются мощностью задания компенсатора ПРУ (![]() ).
).
 Рис.3. Блок-схема системы вычисления тока задания компенсатора ПРУ с использованием метода p-q теории
Рис.3. Блок-схема системы вычисления тока задания компенсатора ПРУ с использованием метода p-q теории
Токи задания компенсатора определяются по найденным значениям мощности компенсатора и напряжению сети в точке его подключения:
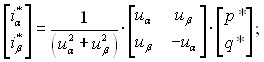 (3)
(3)
где ![]() - токи задания компенсатора в двухфазной системе координат,
- токи задания компенсатора в двухфазной системе координат, ![]() - активная и реактивная мощности задания компенсатора.
- активная и реактивная мощности задания компенсатора.
Недостатком теории «мгновенной мощности» является непосредственное использование переменных ![]() в операции вычисления токов задания. Это приводит к низкой помехоустойчивости этой системы управления, так как при прохождении случайного импульса по каналу получения информации о напряжении сети будет неправильно рассчитан ток задания компенсатора. Это может привести к колебательному переходному процессу выходного тока и напряжения компенсатора, так как преобразователь компенсатора является нелинейной импульсной системой.
в операции вычисления токов задания. Это приводит к низкой помехоустойчивости этой системы управления, так как при прохождении случайного импульса по каналу получения информации о напряжении сети будет неправильно рассчитан ток задания компенсатора. Это может привести к колебательному переходному процессу выходного тока и напряжения компенсатора, так как преобразователь компенсатора является нелинейной импульсной системой.
В результате проведённого анализа было сделано предпочтение использованию метода управления в синхронной системе координат. Метод основан на прямом и обратном преобразовании Парка-Горева. Прямое преобразование (4) заключается в нахождении проекций обобщенного вектора тока или напряжения на оси ортогональной системы координат, вращающейся синхронно с вектором напряжения сети:
 (4)
(4)
где ![]() - значение угла поворота вращающейся системы координат с частотой
- значение угла поворота вращающейся системы координат с частотой ![]() .
.
Переменные составляющие проекций ![]() и
и ![]() (
(![]() ,
, ![]() ) соответствуют высшим гармоническим составляющим и обратной последовательности токов. Для выделения постоянных составляющих, несущих информацию об активной и реактивной мощности, применяются фильтры низких частот (ФНЧ), как в методе «мгновенной мощности».
) соответствуют высшим гармоническим составляющим и обратной последовательности токов. Для выделения постоянных составляющих, несущих информацию об активной и реактивной мощности, применяются фильтры низких частот (ФНЧ), как в методе «мгновенной мощности».
Обратное преобразование Парка-Горева осуществляется по формуле:
 (5)
(5)
Таким образом, если к трехфазной системе тока сначала применить прямое преобразование Кларка, а затем прямое преобразование Парка-Горева, то постоянные составляющие проекций на оси ![]() соответствуют составляющим тока синхронной частоты
соответствуют составляющим тока синхронной частоты ![]() . На рис.4 представлена блок-схема метода генерации задающего сигнала, используя преобразование Парка-Горева.
. На рис.4 представлена блок-схема метода генерации задающего сигнала, используя преобразование Парка-Горева.

Рис.4. Блок-схема системы вычисления тока задания компенсатора с использованием преобразования Парка-Горева.
Регулятор активной и реактивной составляющей тока вычисляет значения токов задания компенсатора в синхронной системе координат. Далее вычисляются токи задания компенсатора в стационарной двухфазной системе координат.
Преимуществом данного метода по сравнению с теорией «мгновенной мощности» является возможность оперирования непосредственно активными и реактивными составляющими тока и напряжения, а не некими мгновенными мощностями. Преимуществом метода является также использование эталонных сигналов при вычислении токов задания компенсатора, а также наличием фильтров низких частот, которые значительно ослабляют возможные импульсные помехи в канале измерения токов. Недостатком этого метода является необходимость синхронизации с напряжением сети эталонных единичных сигналов (![]() и
и ![]() ). Для синхронизации может использоваться система фазовой автоподстройки частоты (ФАПЧ). Так как в синхронизируемом напряжении сети могут присутствовать высшие гармоники, то пересечение нуля кривой напряжения может не совпадать с нулевой фазой основной гармоники напряжения сети. Система ФАПЧ обеспечивает высокую точность при несинусоидальности напряжения сети, так она является следящей системой, частота настройки которой определяется частотой управляющего сигнала, а сигналом рассогласования является разность фаз управляющего сигнала и сигнала обратной связи.
). Для синхронизации может использоваться система фазовой автоподстройки частоты (ФАПЧ). Так как в синхронизируемом напряжении сети могут присутствовать высшие гармоники, то пересечение нуля кривой напряжения может не совпадать с нулевой фазой основной гармоники напряжения сети. Система ФАПЧ обеспечивает высокую точность при несинусоидальности напряжения сети, так она является следящей системой, частота настройки которой определяется частотой управляющего сигнала, а сигналом рассогласования является разность фаз управляющего сигнала и сигнала обратной связи.
В настоящее время в основном используются два метода регулирования тока компенсаторов, выполненных на базе преобразователя напряжения. Первый метод заключается в регулировании тока компенсатора посредством вычисления напряжения преобразователя с использованием пропорционально-интегрального регулирования. Второй метод заключается в непосредственном управлении токами в фазах преобразователя по их отклонению от значения тока задания компенсатора. Динамические характеристики модулятора с вычислением напряжения преобразователя ограничены постоянной времени пропорционально-интегрального регулятора канала вычисления. Этот недостаток может привести к перегрузке компенсатора в динамических режимах работы или привести к разрядке накопителя, поэтому в управлении был использован метод непосредственной модуляции тока, без вычисления напряжения преобразователя, не имеющий этого недостатка. Существует различные виды этого вида модуляции: релейная (гистерезисная), модуляция методом одношагового прогноза и другие. При этом преобразователь напряжения с фильтрующими дросселями на стороне переменного тока имеет свойства инвертора тока, а не напряжения, что обуславливает хорошие динамические характеристики. Управление было реализовано по методу одношагового прогноза заключающегося в расчёте на каждом такте модуляции среднего значения напряжения преобразователя, при котором ток в конце такта модуляции становится равным заданному значению. Управление фазными токами компенсатора осуществляется посредством формирования напряжения, поэтому ток в фазах является вторичным, т.е. формируется с задержкой как интеграл от разницы мгновенных значений напряжений компенсатора и сети:
![]() (6)
(6)
где ![]() - ток компенсатора,
- ток компенсатора, ![]() ,
, ![]() - фазное напряжение сети и компенсатора, L – индуктивность дросселя, включенного между этими источниками ЭДС.
- фазное напряжение сети и компенсатора, L – индуктивность дросселя, включенного между этими источниками ЭДС.
Напряжение преобразователя вычисляется в начале каждого такта модуляции с целью обеспечения равенства среднего значения генерируемого тока и тока задания. За один такт модуляции ток в дросселе компенсатора увеличится на величину ![]() , равную:
, равную:
![]() (7)
(7)
где ![]() - период модуляции,
- период модуляции, ![]() - среднее значение напряжения сети за период модуляции,
- среднее значение напряжения сети за период модуляции, ![]() - среднее значение фазного напряжения компенсатора, равное перемножению напряжения на накопителе на коэффициент заполнения на такте модуляции.
- среднее значение фазного напряжения компенсатора, равное перемножению напряжения на накопителе на коэффициент заполнения на такте модуляции.
Сигналы управления полупроводниковыми ключами преобразователя вычисляются с использованием теории векторной модуляции, то есть модуляция пространственного вектора напряжения преобразователя. Важным преимуществом этого метода модуляции является более высокое значение коэффициента ![]() в линейном диапазоне модуляции (0,578). При этом напряжение на накопительном конденсаторе может быть на 15% меньше напряжения при использовании метода модуляции на основе сравнения с несущей. Метод векторной модуляции используется, когда необходимо управлять обобщёнными векторами тока и напряжения компенсатора.
в линейном диапазоне модуляции (0,578). При этом напряжение на накопительном конденсаторе может быть на 15% меньше напряжения при использовании метода модуляции на основе сравнения с несущей. Метод векторной модуляции используется, когда необходимо управлять обобщёнными векторами тока и напряжения компенсатора.
В четвёртой главе проведён анализ совместной работы ПРУ и АД с целью определения необходимых электроэнергетических параметров ПРУ, рассчитанного на запуск конкретного двигателя. Расчет проведён с использованием пространственных векторов переменных электрической машины. Математическое моделирование динамических режимов работы двигателя осуществлялось в программе Simulink программного комплекса Matlab.
Полученные схемы замещения ОЭМ, справедливы только в установившихся режимах работы двигателя. Однако, если пуск двигателя происходит в условиях, когда в токах статора и ротора свободные составляющие (уравнительные токи) незначительны, для расчёта может быть применена эта схема замещения. Проверка точности расчётов осуществлялась с использованием математических моделей двигателя, более точно описывающей динамические режимы работы двигателя (учитывающих перекрёстные связи, обусловленные наличием ЭДС вращения ротора).
При увеличении сопротивления сети питания двигателя уменьшается напряжение на двигателе в процессе пуска. Компенсация реактивной мощности позволяет уменьшить ток, потребляемый из сети в процессе пуска и повысить напряжение и пусковой момент двигателя. На рис.5 приведены полученные зависимости начального пускового момента двигателя типа 4АН250М4, мощностью 110кВ, при пуске от сети ограниченной мощности, в зависимости величины полного сопротивления сети (Zc). Графики приведены в относительных единицах, за базовое значение момента принято номинальное значение момента двигателя. За базовое значение сопротивления сети приято значение полного сопротивления двигателя в номинальном режиме работы, сопротивление сети имеет активно-индуктивный характер, причём активное сопротивление равно индуктивному. Номинальное значение начального пускового момента (при номинальном напряжении питания) равно 0,3 ед. При полной компенсации реактивной мощности двигателя график момента обозначен как ![]() . График момента двигателя при частичной компенсации реактивной мощности двигателя обозначен
. График момента двигателя при частичной компенсации реактивной мощности двигателя обозначен ![]() . При этом перегрузка по току ПРУ составляет 4, с учётом того, что номинальная установленная мощность ПРУ равна реактивной мощности двигателя в номинальном режиме работы. На рис.5 приведён график момента двигателя без компенсации реактивной мощности (
. При этом перегрузка по току ПРУ составляет 4, с учётом того, что номинальная установленная мощность ПРУ равна реактивной мощности двигателя в номинальном режиме работы. На рис.5 приведён график момента двигателя без компенсации реактивной мощности (![]() ).
).

Рис.5. Зависимость пускового момента двигателя от сопротивления сети при компенсации реактивной мощности
На рис.6 показаны зависимости мощности ПРУ от сопротивления сети. Эти данные позволяют рассчитать необходимую мощность ПРУ в зависимости от мощности двигателя и требуемого значения пускового момента двигателя. За базовое значение мощности принята полная мощность двигателя в номинальном режиме работы.

Рис.6. Зависимость напряжения на двигателе и мощности ПРУ от сопротивления сети
а) напряжение на двигателе; б) мощность ПРУ;
в) отношение мощности ПРУ в режиме пуска (![]() ) к реактивной мощности двигателя в номинальном режиме работы (
) к реактивной мощности двигателя в номинальном режиме работы (![]() ).
).
Отношение мощности ПРУ в режиме пуска к реактивной мощности двигателя в номинальном режиме работы показывает расчётную перегрузку ПРУ в режиме пуска, с учётом того, что установленная мощность ПРУ равна реактивной мощности двигателя в номинальном режиме работы.
На рис.7 приведены данные расчёта энергии затрачиваемой ПРУ за время пуска (Е) в зависимости от электромагнитного момента двигателя (М), который ПРУ регулирует на заданном постоянном уровне и сопротивления сети (Zc) в относительных единицах. При помощи этих данных можно определить какую энергию затрачивает ПРУ на запуск двигателя с заданным значением пускового момента (М) при определённом сопротивлении сети (Zc). За базовое значение энергии принята величина энергии, потребляемая двигателем в номинальном режиме работы за одну секунду.

Рис.7. Энергия затрачиваемая ПРУ за время пуска
В пятой главе приведено описание математического моделирования ПРУ и АД, которое проводилось с целью подтверждения теоретического анализа и методик проектирования ПРУ. При этом был проведен анализ и выбран наиболее перспективный программный комплекс моделирования Simulink. Программа Simulink позволяет моделировать смешанные аналого-цифровые системы. В библиотеке пакета имеются элементы силовой электроники: тиристоры, IGBT-транзисторы и т.п. Математическая модель ПРУ и двигателя в программе Simulink содержит компенсатор мощности ПРУ, двигатель и сеть электроснабжения ограниченной мощности, представленную в виде источника напряжения и активно-индуктивного сопротивления. На рис.8 показаны графики моделирования пуска двигателя типа 4АН250М4, номинальной мощностью 110кВт, с использованием ПРУ. На рис.8, а) показаны токи двигателя, которые увеличиваются в момент включения ПРУ благодаря увеличению напряжения питания двигателя (рис.8, г). Напряжение на двигателе увеличивается из-за компенсации реактивной мощности двигателя пуско-регулирующим устройством. На рис.8, б) показаны токи ПРУ, равные реактивным составляющим токов двигателя, на рис.8, в) показаны токи сети, равные активным составляющим токов двигателя. Среднее значение тока сети в процессе пуска составляет 170А (действующее значение), что примерно равно току двигателя в номинальном режиме работы. Время пуска составляет 2,2 с. В момент времени 2,5 с. на вал двигателя подаётся номинальный момент нагрузки, при этом ПРУ продолжает компенсацию реактивной мощности двигателя.

Рис.8 Графики тока и напряжения моделирования пуска двигателя типа 4АН250М4
а) токи двигателя, б) токи ПРУ, в) токи сети, г) напряжение питания двигателя.
Результаты проведённого моделирования подтверждают верность выведенных расчётных соотношений для определения электроэнергетических параметров ПРУ.
Были сделаны следующие выводы: без использования ПРУ значение пускового тока двигателя, потребляемого из сети в два раза больше номинального значения тока двигателя, а пусковой момент меньше в четыре раза номинального пускового момента двигателя. При использовании ПРУ ток сети в процессе пуска не превышает номинальный ток двигателя, а пусковой момент увеличивается в два раза, а время пуска уменьшается в два раза. В установившемся режиме работы двигателя ПРУ компенсирует реактивную мощность двигателя. Например, для двигателя типа 4АН250М4 мощность потребляемая из сети уменьшается с 128кВА до 115кВА, то есть потребляется на 10% меньше, чем достигается эффект энергосбережения.
В шестой главе описана разработанная методика расчёта и выбора силовых компонентов ПРУ. Для расчёта и выбора параметров силовых компонентов ПРУ необходимо определить требования к его энергетическим характеристикам. Энергетические характеристики ПРУ определяются следующими параметрами: напряжение сети, к которой подключается ПРУ; параметры пускаемого двигателя; требуемая величина пускового момента двигателя; требуемое время пуска (если необходимо); допустимый коэффициент гармонических искажений напряжения и тока в точке подключения ПРУ; сопротивление питающей сети.
Эти данные позволяют определить следующие основные энергетические характеристики ПРУ: величина тока компенсатора в статическом и пусковом режимах работы; величина энергии, расходуемая за время пуска двигателя.
Результатом расчёта являются следующие параметры силовых элементов компенсатора ПРУ:
1) параметры силовых полупроводниковых ключевых элементов: тип ключевых элементов, класс напряжения и тока, частота коммутации; величина тепловых потерь в ключевых элементах в пусковом и статическом режимах работы и параметры системы охлаждения ключа; температура кристалла ключевого элемента в пусковом и статическом режимах работы.
2) параметры накопителя электроэнергии на стороне постоянного тока компенсатора: тип накопителя; максимальное и номинальное рабочее напряжение; энергоёмкость; величина пульсаций напряжения на накопителе.
3) параметры дросселей фильтров на стороне переменного тока компенсатора: индуктивность; величина падения напряжения на дросселе основной и модуляционной гармоник в пусковом и статическом режимах работы; потери мощности в дросселе.
Рабочее значение тока полупроводниковых элементов, частота коммутации, напряжение на стороне постоянного тока преобразователя и другие параметры компенсатора являются взаимозависимыми, что приводит к необходимости использования итерационного метода расчёта. Ток ключевого элемента компенсатора имеет импульсный характер, при этом значительную величину составляет отношение максимального пикового значения тока к его среднему значению. Поэтому расчёт мощности потерь проводился при помощи математического моделирования, учитывающего реальное значение тока ключевого элемента, позволяющего более точно определить величину тепловых потерь в ключевых элементах компенсатора ПРУ.
В седьмой главе описано физическое моделирование ПРУ. Экспериментальное исследование работы ПРУ в режиме генерации реактивной мощности было выполнено на физическом макете, предназначенном для непосредственного подключения к трехфазной сети 0,4кВ, 50 Гц. Установленная мощность макета 3кВА. Номинальное действующее значение основной гармоники тока макета 4,5А. Цифровая часть системы управления представляет собой готовую микропроцессорную плату Starter Kit с микроконтроллером ХС167CI фирмы Infineon Technologies AG. Для проверки работоспособности алгоритма системы управления был проведен ряд экспериментов, подтверждающий эффективность работы системы управления компенсатора ПРУ.
В заключении сформулированы основные выводы по диссертационной работе:
- разработаны схемотехнические решения и принципиальные схемы нового вида ПРУ, на базе статического компенсатора реактивной мощности.
- разработаны алгоритмы управления ПРУ, обеспечивающие эффективное управление мощностью компенсации ПРУ.
- выведены расчётные соотношения для определения необходимых электроэнергетических параметров ПРУ, на основе проведённого анализа совместной работы ПРУ и АД. Расчет проводится с использованием математического моделирования динамических режимов работы двигателя в программе Simulink программного комплекса Matlab. В расчёте используются обмоточные данные двигателя.
- создана математическая модель силовой части и системы управления ПРУ в программе Simulink, позволяющая проводить анализ работы ПРУ в динамических и статических режимах.
- разработана инженерная методика расчёта параметров основных силовых элементов ПРУ, рассчитанного на запуск конкретного двигателя. Методика создана для расчёта параметров элементов ПРУ по известным значениям основных электроэнергетических параметров ПРУ.
Основные положения диссертационной работы изложены в печатных трудах:
- Розанов Ю.К., Смирнов М.И., Кошелев К.С. Цифровая система управления статическим компенсатором реактивной мощности // Электричество. - 2006 г.- вып.7.- С.25-30.
- Розанов Ю.К., Рябчицкий М.В, Смирнов М.И. Цифровая система управления преобразователем неактивной мощности // Техническая электродинамика.- 2005г.- вып.2.- С.30-33.
- Розанов Ю.К., Рябчицкий М.В, Смирнов М.И. Пуско-регулирующее устройство для асинхронного двигателя на основе преобразователя напряжения с ёмкостным накопителем // XI-я международная конференция «Электромеханика, электротехнологии, электротехнические материалы и компоненты» МКЭЭЭ – 2006: Тез. докл. – Алушта, 2006.- С. 182-183.
- Патент на изобретение №2262180 от 10 октября 2005г. «Устройство пуска асинхронного двигателя».