

ГОСУДАРСТВЕННЫЙ КОМИТЕТ РОССИЙСКОЙ ФЕДЕРАЦИИ
ПО РЫБОЛОВСТВУ
Дальневосточный государственный технический
рыбохозяйственный университет
ГИРОКУРСОУКАЗАТЕЛИ С КОСВЕННОЙ КОРРЕКЦИЕЙ
Сборник лабораторных работ для студентов специальности 180403.65
Владивосток
2011
УДК 629.5.058.44
ББК 39.471-5
С 20
Утверждено редакционно-издательским советом Дальневосточного государственного технического рыбохозяйственного университета/
Автор – Р.Н. Алифанов Н.В. Вовченко
Рецензент - И.С. Карпушин
Печатается в авторской редакции
© Алифанов Р.Н., 2011
© Дальневосточный
государственный
технический
рыбохозяйственный
университет, 2011
Введение
Бурное развитие технических средств навигации в настоящее время позволило существенно повысить и точность судовождения. Особенно значительный вклад в решение этих проблем вносят спутниковые навигационные системы. Однако они обеспечивают в основном коррекцию координат места судна, а вопросы курсоуказания продолжает решать гирокомпас, поэтому он был и остается одним из важнейших электронавигационных приборов.
В течение многих лет на судах успешно использовались гирокомпасы с непосредственным управлением типа «Курс» и «Амур». С повышением интенсивности судоходства, при плавании в высоких широтах, с появлением высокоскоростных судов возникла потребность в гироскопических курсоуказателях, способных обеспечить решение задач в новых условиях. Были созданы гирокурсоуказатели нового типа. Они могут работать в режимах гирокомпаса и гироазимута, что значительно расширяет диапазон возможностей их использования. Это определило название данных приборов - гироазимут-компас. В технической литературе их называют также двухрежимными гирокурсоуказателями (ГКУ). Благодаря наличию режима гироазимута данные приборы обеспечили первое и пока единственное плавание надводного судна к северному полюсу. Имеется в виду знаменитый рейс атомного ледокола «Арктика», выполненный им в 1977 году под командованием капитана Ю.С. Кучиева.
Настоящий сборник лабораторных работ предназначен для курсантов и слушателей судоводительской специальности морских институтов, университетов и академий, освоивших теоретический курс гирокурсоуказателя.
Содержание отчетов по лабораторным работам представлены в приложении.
Данное пособие составлено с использованием материалов любезно предоставленных к.т.н., доцентом Саранчиным А.И. Авторы выражают глубокую признательность за консультации по содержанию указанных работ.
Лабораторная работа 1
Технико-эксплуатационные характеристики, назначение и состав комплекта, принцип работы
Учебная цель: изучить технико-эксплуатационные характеристики, принцип работы гирокурсоуказателя «Вега», состав и назначение прибором комплекта, их размещение на судне; проанализировать причины возникновения методических погрешностей гирокурсоуказателя.
Лабораторная установка - действующий комплект гирокурсоуказателя «Вега».
- Требования, предъявляемые к гирокомпасам
Регистр судоходства Российской Федерации с учетом соглашений в рамках Международной Морской Организации (ИМО) предъявляет к гирокомпасам следующие требования:
Неподвижное основание (широта 60°):
- время прихода в меридиан не более 6 часов;
- точность +0,75°sec, при среднеквадратическом значении разностей между отдельными отсчетами курса ±0,25° sec ;
- погрешность показаний от пуска к пуску ±0,25° sec ;
- скорость отработки следящей системы не менее 6°/с.
На судне (широта ниже 60°).
Во время качки бортовой - до 20°, килевой - до 10° с периодом 6 - 15 с погрешность гирокомпаса должна быть не более ±1° sec, при маневре курсом на 180° - не более ±3°, остаточная погрешность после ввода скоростной коррекции при скорости до 20 узлов - не более ±0,25° sec.
При любых условиях расхождения в показаниях репитеров с основным прибором не должны превышать ±0,2°.
Курсограф должен обеспечивать запись курсов с точностью ±1°, а его механизм - протяжку ленты с точностью ±1% от времени.
1.2. Назначение и технико-эксплуатационные характеристики гирокурсоуказателя «Вега»
В специальной литературе рассматриваемый комплект называют гирокурсоуказателем (ГКУ), или гироазимуткомпасом (ГАК). Названия равноценны, поэтому в дальнейшем будут употребляться оба термина.
Гирокурсоуказатель «Вега» предназначен для использования на судах морского флота и рыбопромысловых судах, скорость которых не превышает
70 узлов. Прибор имеет два режима работы: основной - режим корректируемого гирокомпаса (ГК) и дополнительный - режим гироазимута (ГА).
Погрешности гирокурсоуказателя «Вега» для различных условий приведены в табл. 1.1.
Таблица 1.1
| Режим, условия использования ГАК | Величина погрешности | |
| Широта до 70° | Широта 70-80° | |
| Режим ГК | ||
| -неподвижное основание | ±0,5° | ±0,5° |
| -при движении судна постоянными курсом и скоростью; | ±0,8-1,0° | ±1,5° |
| -на маневрирующем судне; | ±2,0° | ± 2,5° |
| -на качке судна | ± 1,5° | ±2,0° |
| Режим ГА | ||
| -остаточный дрейф чувствительного элемента | ||
| ±1,0°/ч | ±1,5°/ч | |
Гарантийный срок службы чувствительного элемента (ЧЭ) 10 тыс. часов. Рабочая температура поддерживающей жидкости 73 ± 4° С, поэтому в схеме ПСУ предусмотрен ее принудительный подогрев, что исключает потребность в системе охлаждения. Терморегулирование производится автоматически. В приборе предусмотрено ускоренное приведение ЧЭ в меридиан. Время приведения составляет не более 30 мин. Время прихода в меридиан без ускоренного приведения - не более 6 часов.
Питание ГКУ осуществляется от судовой сети трехфазного тока напряжением 220 (380) В, частотой 50 Гц и однофазного тока 110 В, 50 Гц или от сети постоянного тока 24 (27) В. Приборы гироазимуткомпаса, которые устанавливаются в закрытых помещениях, сохраняют работоспособность при температуре окружающей среды от - 10 до + 50° С. Пелорусы и репитеры, устанавливаемые на открытой палубе, работоспособны при температуре от 40 до + 60° С.
1.3.Состав комплекта ГКУ «Вега»
1. Основной прибор ВГ-1 А- предназначен для непрерывной автоматической выработки курса судна.
2. Прибор питания ВГ-2А - предназначен для обеспечения системы всеми видами питания, защиты и контроля питающих цепей, а также для включения и выключения гирокурсоуказателя.
3. Штурманский пульт ВГ-ЗА - предназначен для трансляции курса потребителям, переключения режимов (ГА или ГК), сигнализации о работе всей системы, а также для выработки корректирующих сигналов, которые формируют моменты коррекции чувствительного элемента.
4. Репитеры для пеленгования 19А, 19Н или 19Н-1 с пелорусами 20А (20М), 21Г.
5. Репитеры настенные 38, 38А, 38Н (38Н-1)
6. Курсограф 23Т предназначен для документирования (записи) курсов судна.
7. Разветвительная коробка 15М.
8. Оптические пеленгаторы ПГК-2.
9. Преобразователь АМГ-202 (АМГ-200) с магнитным пускателем ПМТ-1111 при питании от судовой сети переменного тока или преобразователь АПМ-300 ВМ с пускателем ВГ-5 при питании от сети постоянного тока. На судах обычно устанавливают два репитера для пеленгования и два-три информационных репитера. В этом случае достаточно одной разветвительной коробки.
При необходимости число репитеров можно увеличить, пропорционально увеличив число разветвительных коробок.

1.4. Размещение приборов на судне
При установке приборов гирокурсоуказателя на судне необходимо руководствоваться определенными требованиями.
1. Прибор ВГ-1А должен располагаться как можно ближе к центру качания судна для уменьшения влияния сил инерции, возникающих на качке Он устанавливается вместе с амортизатором на металлическом фундаменте или кронштейне, которые крепятся к палубе или к переборке. В месте установки наносятся две риски, параллельные диаметральной плоскости судна (этими рисками совмещаются риски, нанесенные на основании прибора точность совмещения не ниже ±0,2°. При этом болты крепления должны располагаться симметрично относительно овальных отверстий основания прибора Для того чтобы обеспечить доступ к прибору, со стороны штепсельных разъемов должно оставаться свободное пространство не менее 0,15 м, с остальных сторон и сверху - не менее 0,5 м.
Вблизи прибора ВГ-1А не должно быть тепловых потоков, вызывающих резкие колебания температуры, а интенсивность внешних воздействий не должна превышать допустимых норм. Помещение, где установлен ВГ-1А, оборудуется средствами связи, используемыми при согласовании репитеров.
2. Пелорусы вместе с пеленгаторными репитерами монтируются на открытой палубе на деревянных подушках толщиной не менее 50 мм. При этом линия 0-180° азимутальной шкалы должна быть параллельна диаметральной плоскости судна с точностью не ниже ±0,2° (отметка 0° в корму). Разность пеленгов отдаленного предмета, взятых одновременно с обоих репитеров с помощью оптических пеленгаторов ПГК-2, не должна превышать ±0,15°.
3. Приборы ВГ-2А, ВГ-ЗА, 23-Т крепятся к переборке таким образом, чтобы обеспечить удобный доступ к органам управления и контроля.
Прибор ВГ-2А размещается в одном помещении с прибором ВГ-1А. Штурманский пульт ВГ-ЗА и курсограф 23-Т устанавливаются в штурманской рубке. При необходимости все три прибора могут располагаться в одном месте, причем конструкция позволяет разместить их вплотную друг к другу, без зазоров между боковыми сторонами.
4. Агрегат питания крепится к палубе на деревянной подушке толщиной не менее 30 мм. Продольная ось агрегата устанавливается, как правило, параллельно диаметральной плоскости судна.
1.5. Принцип работы
В отличие от маятникового гирокомпаса чувствительный элемент (ЧЭ) ГКУ «Вега» имеет астатический (уравновешенный) гироскоп 1 (рис. 1.1), который с помощью горизонтальной пары торсионов 10 (по оси у) и вертикальной пары торсионов 8 (по оси z) подвешен в следящей сфере 2, являющейся внешним корпусом гироблока. Торсион - это отрезок проволоки, работающий на скручивание вокруг своей продольной оси. Для снятия нагрузки на торсионы за счет массы ЧЭ пространство между ним и следящей сферой заполнено специальной нетоконроводной жидкостью 3. Жидкость при рабочей температуре обеспечивает чувствительному элементу нулевую плавучесть.
Положение следящей сферы относительно ЧЭ измеряется с помощью двухкоординатных датчиков угла 4 (ДДУ), роторы которых расположены на следящей сфере, а статоры - на полюсах гиросферы 1 (по оси х).
1.5.1. Режим свободного гироскопа
Одной из основных особенностей схемы ГКУ является то, что его следящая система используется не только по своему прямому назначению слежение за положением ЧЭ по азимуту и высоте, но и участвует в создании управляющих и корректирующих моментов гироскопа.
Чувствительный элемент, сохраняя неизменным свое положение в инерциальном пространстве, вследствие вращения Земли видимым образом движется в горизонтной системе координат в азимуте и по высоте. Следящая сфера остается на месте, поэтому она рассогласуется с гиросферой.
Появившееся таким образом перемещение гиросферы в азимуте приводит к рассогласованию статора и ротора ДДУ и к возникновению электрического сигнала рассогласования на его соответствующих обмотках. Этот сигнал усиливается усилителем УА (рис. 1.1) и поступает на вертикальный двигатель ДВВ. Последний через зубчатую передачу разворачивает следящую сферу посредством вертикального кольца (5) в азимуте до исчезновения сигнала рассогласования, то есть до согласованного положения с гиросферой.
Перемещение гиросферы по высоте приводит к появлению сигнала рассогласования на других обмотках ДДУ. Этот сигнал усиливается усилителем УГ и поступает на горизонтальный двигатель ДВГ который разворачивает карданово кольцо 9 вместе со следящей сферой до ее согласования с гиросферой по высоте.

Свободный гироскоп изменяет свое положение в горизонтной системе координат сравнительно медленно, поэтому при циркуляции или качке он остается на месте, а следящая сфера увлекается судном. В результате они рассогласуются друг с другом и возникшие на обмотках ДДУ сигналы отрабатываются так, как уже рассмотрено выше.
Режим свободного гироскопа у ГАК «Вега» не предусмотрен. У некоторых других гирокурсоуказателей этого типа такой режим используется при запуске прибора. Здесь он показан для пояснения работы следящей системы ГАК. Из сказанного в данном параграфе видно, что следящая система является двухканальной, то есть слежение за чувствительным элементом осуществляется в азимуте и по высоте.
1.5.2. Режим гирокомпаса
Обратимся к рис. 1.1. Допустим, в начальный момент главная ось гиросферы отклонена от меридиана к востоку на угол. Вследствие вращения Земли главная ось, сохраняя неизменным свое положение в инерциальном пространстве, в горизонтной системе координат уходит в азимуте к востоку и поднимается по высоте. Появившиеся при этом углы рассогласования между полюсами ЧЭ и следящей сферы будут сниматься в виде электрических сигналов с обмоток ДДУ И после усиления в УГ и УА поступят на двигатели. Двигатели ДВГ и ДВВ приведут следящую сферу в согласованное положение с гиросферой.
Со следящей сферой жестко связан индикатор горизонта ИГ (реально в приборе он установлен на внутреннем кардановом кольце), причем его рабочая плоскость параллельна главной оси ЧЭ. Следовательно, при отклонении оси х гиросферы от плоскости горизонта на такой же угол отклонится и следящая сфера, а на выходе индикатора горизонта появится электрический сигнал, пропорциональный этому отклонению. Далее рассмотрим работу ГАК по каналам.
Сигнал ИГ поступает на усилитель УГ, а затем на двигатель ДВГ Двигатель начинает работать, разворачивая следящую сферу вокруг оси у. Гиросфера остается на месте, следовательно, горизонтальные торсионы закручиваются, создавая вращательный момент по оси у (для данного случая в отрицательную сторону). Под действием этого момента гиросфера прецессирует в азимуте к западу. Таким образом, двигатель ДВГ создал горизонтальный момент, вызвавший движение ЧЭ в азимуте, поэтому он получил название датчика моментов азимутального ДМА (в литературе его также называют датчиком горизонтальных моментов). Горизонтальные торсионы при этом выполняют роль не только подвеса и центрирования гиросферы, но и прикладывают к ней крутящий момент. Кроме того, торсионы используются как провода для подачи питания на ЧЭ.
Итак, гиросфера прецессирует в азимуте к западу под действием созданного момента Ly. Восточная часть горизонта в инерциальном пространстве опускается, поэтому, пока ось отклонена к востоку, она продолжает подниматься в горизонтной системе координат. Возрастание угла подъема главной оси приводит к нарастанию сигнала ИГ, а значит, и к увеличению момента Ly, который вызывает пропорциональное увеличение скорости прецессии ЧЭ к западу.
Вращение плоскости горизонта происходит вокруг линии меридиана. Когда гиросфера достигнет его плоскости под действием момента Ly, то окажется поднятой на максимальный угол. Соответственно максимальны сигнал ИГ, момент Ly и угловая скорость прецессии. Пройдя с наибольшей скоростью плоскость меридиана, ось х окажется в западной части горизонта, которая в инерциальном пространстве поднимается. Вследствие этого угол подъема главной оси уменьшается, вызывая уменьшение сигнала ИГ, а значит, и момента Ly. Угловая скорость прецессии уменьшается. Продолжая снижаться, ось х опускается под плоскость горизонта. Сигнал ИГ изменяет знак. Датчик моментов ДМГ создает момент Ly, направленный к востоку, куда и начинается прецессия гиросферы.
При своем движении к меридиану ось х продолжает опускаться вследствие вращения Земли, так как она все еще находится в западной части горизонта. Сигнал ИГ, а вместе с ним момент Ly, и угловая скорость прецессии возрастают. Максимальных значений они достигают в плоскости меридиана.
Оказавшись в восточной части горизонта, ось х начинает подниматься вследствие вращения Земли, сигнал ИГ уменьшается, угловая скорость прецессии снижается. Когда ось х поднимется над горизонтом, знак момента и направление прецессии меняются. Далее процесс повторяется, гиросфера совершает незатухающие колебания, отклоняясь в азимуте от истинного меридиана к востоку и западу на один и тот же угол. Момент Ly, вызвавший незатухающие колебания, является маятниковым моментом.
Для превращения незатухающих колебаний в затухающие к гиросфере прикладывается демпфирующий момент, который сдвинут в пространстве относительно маятникового на угол 90°, что равносильно сдвигу по фазе на такой же угол. Он формируется также по данным индикатора горизонта. При отклонении главной оси гиросферы от плоскости горизонта сигнал ИГ поступает не только в горизонтальный канал управления, но и в вертикальный: в усилитель УА и на вертикальный двигатель ДВВ. Двигатель, отрабатывая сигнал, принудительно рассогласовывает следящую сферу с гиросферой. В результате вертикальные торсионы закручиваются, прикладывая к гиросфере крутящий момент по оси z. Теперь вертикальный двигатель выполняет не только функцию слежения, но и создает вертикальный момент, поэтому он называется датчиком вертикальных моментов ДМВ.
Вертикальный момент ограничивает скорость подъема и опускания главной оси гиросферы. Это ограничивает нарастание сигнала ИГ, а значит, и маятникового момента, что приводит к затуханию колебаний ЧЭ. Таким образом, вертикальный момент является демпфирующим.
Маятниковый и демпфирующий моменты - это управляющие моменты гирокомпаса. Они создаются по данным индикатора горизонта через следящую систему. Отсюда следует, что связь гироскопа с Землей осуществляется через ИГ, то есть косвенным путем, поэтому ГКУ «Вега» называется гирокомпасом с косвенным управлением.
1.5.3. Коррекция гирокомпаса
Из вышеизложенного следует, что управляющие моменты создаются по данным индикатора горизонта, а его сигнал существует только тогда, когда имеется отклонение главной оси гиросферы от плоскости горизонта. Если ось х окажется в плоскости истинного меридиана, который в инерциальном пространстве не поднимается и не опускается, то вертикальный (демпфирующий) момент приведет ее в плоскость горизонта. Сигнал ИГ исчезнет. Таким образом гироскоп становится свободным и вследствие вращения Земли начинает движение в азимуте. Как только появится угол отклонения в азимуте, начинается подъем оси х гироскопа. С индикатора горизонта снимется сигнал, пропорциональный углу подъема. По данному сигналу формируются управляющее моменты, причем маятниковый момент направлен к западу, куда и начинается прецессия гироскопа. Однако, пока углы и небольшие, скорость прецессии меньше скорости вращения меридиана и углы, а вместе с ними и управляющие моменты, будут возрастать. В конечном итоге прецессия к западу под действием маятникового момента сравняется с угловой скоростью вращения меридиана. Теперь гироскоп следит за меридианом с отставанием от него на угол Г=, который называется широтной девиацией, или девиацией затухания ГКУ. Таким образом, для слежения за меридианом гироскопу необходим постоянный момент но оси y, направленный к западу. Для этого главная ось должна быть приподнята над горизонтом, чтобы с ИГ снимался сигнал, создающий маятниковый момент. Такое положение у гирокурсоуказателя возможно только тогда, когда ось х наклонена к востоку на угол Г.
Для исключения широтной девиации вычислительная схема прибора ВГ-ЗА (рис. 1.1) рассчитывает сигнал, который поступает на азимутальный датчик моментов ДМА. Последний, отрабатывая сигнал, закручивает горизонтальные торсионы и создает корректирующий момент LKУ к западу, приводящий гиросферу в меридиан и обеспечивающий слежение за ним.
На движущемся судне у гирокомпаса возникает скоростная девиация. Для ее исключения в вычислительной схеме ГЛК вырабатывается сигнал, поступающий в вертикальный канал управления. Датчик моментов ДМВ закруткой вертикальных торсионов корректирует пропорционально скоростной девиации.
Таким образом, в отличие от гирокомпасов типа «Курс» у ГКУ «Вега» компенсация погрешностей осуществляется коррекцией непосредственно чувствительного элемента, поэтому прибор получил название корректируемого гирокомпаса. Благодаря действию корректирующих моментов гиросфера всегда находится в плоскости истинного меридиана и горизонта.
1.5.4. Режим гироазимута
Как известно, в данном режиме курсоуказатель сохраняет заданное ему азимутальное направление с определенной точностью в течение некоторого промежутка времени. С этой целью на ЧЭ подается два момента: по оси z -для удержания главной оси в плоскости горизонта (горизонтирование); по оси у - для удержания на Земле в заданном азимутальном направлении.
Момент по оси z, как и в режиме ГК, формируется и прикладывается вертикальным каналом управления по сигналам индикатора горизонта. От азимутального канала в режиме ГА индикатор горизонта отключен, то есть маятниковый момент к ЧЭ не прикладывается. Однако гироскоп не остается свободным в азимуте, так как вычислительная схема продолжает формировать вышеупомянутый момент LКУ, обеспечивающий слежение ЧЭ за уходящим к западу меридианом. Так гиросфера сохраняет заданное ей азимутальное направление.
Форма отчета по лабораторной работе представлена в приложении.
Список литературы
1. Логинов КВ. Электронавигационные и рыбопоисковые приборы. - М: Легкая и пищевая промышленность, 1983.
2. Воронов В.В., Перфильев В.К., Яловенко А.В. Технические средства судовождения. Конструкция и эксплуатация. - М.: Транспорт, 1988.
3. Коган В.М., Чичинадзе М.В. Судовой гироазимуткомпас «Вега». - М.: Транспорт, 1983.
Лабораторная работа 2
Устройство приборов комплекта
Учебная цель: изучить устройство приборов комплекта гирокурсоуказателя «Вега», размещение и назначение органов управления и регулировки; проанализировать способы компенсации методических погрешностей и исключения взаимовлияния азимутального и вертикального каналов управления.
Лабораторная установка - действующий комплект гирокурсоуказателя «Вега».
2.1. Основной прибор ВГ-1А
Основной прибор ВГ-1А состоит из корпуса с размещенной в нем гиросекцией, которая заключает в себе трехстепенной поплавковый гироблок (ТПГ) с чувствительным элементом внутри.
2.1.1. Гироблок
Составная часть трехстепенного поплавкового гироблока - его чувствительный элемент, имеет массу 600 г. Он выполнен в виде двух полусфер, соединенных между собой цилиндрической шейкой-перемычкой (рис. 2.1). Образованная таким образом сфера называется гиросферой 1. Внутри нее размещается гиромотор - асинхронный трехфазный двигатель. Ротор гиромотора выполнен в виде двух маховиков 2, симметрично насаженных на вал 3, вращающийся в установленных в корпусе гиросферы шарикоподшипниках 4. Скорость вращения ротора - 12000 оборотов в минуту. На валу между маховиками расположена роторная обмотка 5 гиромотора. На внутренней поверхности шейки закреплена статорная обмотка 6, на которую подается трехфазный ток 40 В, 500 Гц. Гиросфера герметична и заполнена водородом. На гиросфере напротив торцов вала установлены статоры ДДУ - двухкоординатных датчиков угла 7. Технологические соединения на рис. 2.1 не показаны.
Гиросфера размещена внутри следящей сферы. Зазор между сферами равен 2 мм. Он заполнен жидкостью, плотность которой при рабочей температуре 73 ± 4° С обеспечивает нейтральную плавучесть чувствительного элемента.
Для поддержания температуры жидкости в заданных пределах имеется специальная система терморегулирования. На корпусе гироблока размещены два кольцевых обогревателя и биметаллическое реле ТР-003, используемые для прогрева гироблока при запуске прибора. Для управления схемой обогрева ВГ-1А имеются два термодатчика. Каждый из них представляет собой спираль из медной проволоки, уложенную в пазах гироблока, залитых клеем. Величина активного сопротивления термодатчика характеризует температуру гироблока.
Корпус гиросферы (рис. 1.1) с помощью пары горизонтальных торсионов подвешен в вертикальном установочном кольце 7, расположенном снаружи шейки 6 и выполняющем роль рамы карданова подвеса. Установочное кольцо, в свою очередь, с помощью пары вертикальных торсионов подвешено в следящей сфере, которая одновременно служит корпусом гироблока. Обе пары торсионов лежат в одной плоскости, перпендикулярной главной оси гироскопа.
Торсионы изготовлены из тонкой стальной проволоки и при закручивании создают упругий крутящий момент, пропорциональный углу закрутки. Они установлены со значительным осевым натягом, что препятствует их изгибу, но не мешает упругому закручиванию каждой пары торсионов вокруг своей оси в пределах малых углов. Внутри гироблока имеются упоры, которые ограничивают углы поворота корпуса гироблока относительно гиросферы, а значит, и углы закрутки торсионов, в пределах около ±2°.
Большая изгибная жесткость подвеса, созданная осевым натягом торсионов, центрирует гиросферу, препятствуя ее повороту относительно корпуса гироблока вокруг главной оси и смещению гиросферы вдоль этой оси.
Питание на чувствительный элемент полается как через торсионы, так и через токопроводы, свободно навитые вокруг торсионов.
Следящая сфера представляет собой сложную конструкцию и в собранном виде имеет форму куба. Ее внутренняя поверхность выполнена сферической, где и размещается гиросфера.
Для измерения углов рассогласования между следящей сферой и гиросферой по азимуту и высоте служат два двухкоординатных датчика угла (ДДУ), расположенные с двух сторон блока по оси х. Статоры ДДУ размещены на гиросфере с торцов вала гиромотора, а роторы - на следящей сфере напротив статоров.
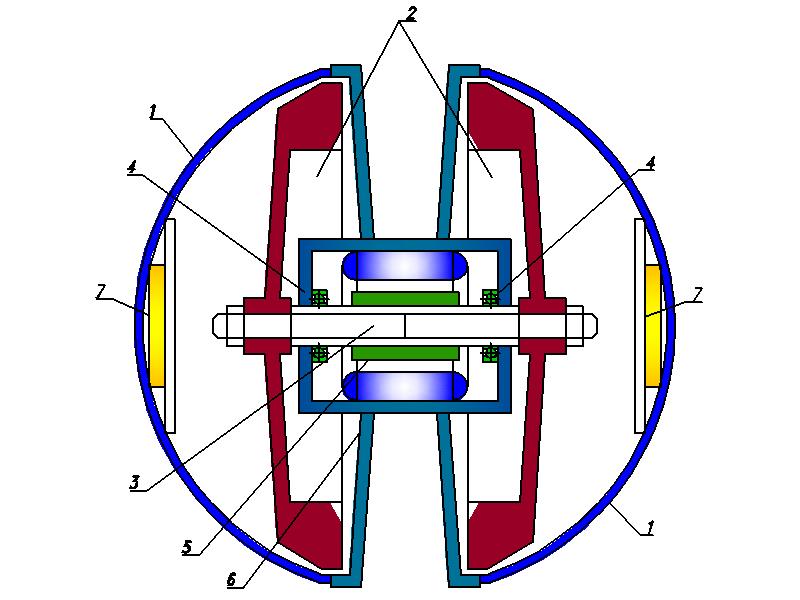
Рис. 2.1
1 гиросфера; 2 Ротор гиромотора выполнен в виде двух маховиков; 3 вал; 4 шарикопошипники; 5 роторная обмотка; 6 Статорная обмотка ; 7 ДДУ
Статор датчика угла представляет собой катушку, намотанную на стержень и размещенную в металлическом стакане. На катушку подается напряжение частотой 500 Гц, и вокруг статора возникает переменное магнитное поле.
Ротор состоит из рамки (рис.2.2), установленной на следящей сфере на расстоянии 2 мм от торца статора. В рамке уложены две пары взаимно перпендикулярных обмоток. Пара I обеспечивает слежение за ЧЭ по высоте и называется горизонтной, пара II - азимутальная. Соединение обмоток в каждой ларе последовательное (согласное). Когда механического рассогласования нет, то есть геометрические центры статора и ротора совпадают, на выходах обмоток ротора сигнал равен нулю.
Если рассогласование происходит в вертикальной плоскости (по высоте), то статор перемещается к одной из горизонтных обмоток, ЭДС в которой возрастает. В другой обмотке ЭДС уменьшается, и суммарное напряжение уже не равно нулю. Возникший на клеммах I сигнал является сигналом рассогласования. Он подается на усилитель УГ и на горизонтальный двигатель ДВГ. Последний разворачивает следящую сферу вокруг оси у до исчезновения сигнала рассогласования, то есть до согласованного положения статора и ротора.

При смещении геометрического центра статора в азимуте, например вправо, величина ЭДС в правой обмотке увеличивается, в левой уменьшается. Возникший на выходе II сигнал рассогласования после усиления в усилителе УА отрабатывается вертикальным двигателем. ДВН разворачивает следящую сферу до исчезновения сигнала рассогласования.
Расположение двух одинаковых последовательно соединенных ДДУ на противоположных сторонах гироблока позволяет исключать погрешности из-за изменения зазоров при сотрясениях гироблока, а также повышает крутизну сигналов рассогласования.
Торсионы и датчики угла при сборке выставляют так, чтобы положение, в котором сигналы ДДУ равны нулю, соответствовало незакрученному состоянию торсионов, то есть чтобы «электрический нуль» датчиков угла совпадал с «упругим нулем» торсионов.
2.1.2. Гиросекция
В состав гиросекция кроме гироблока входят системы его подвеса и термостабилизации (рис. 1.1).
Гироблок размещен в установочном кольце, которое своими цапфами закреплено в подшипниках карданова кольца 9. На установочном кольце с западной стороны параллельно главной оси гироскопа находится индикатор горизонта. Горизонтальное кольцо цапфами входит в подшипники внешнего вертикального кольца 5, на котором смонтирован горизонтальный двигатель (он же датчик моментов ДМГ), передающий через зубчатую передачу вращение на горизонтальное кольцо. Наружное карданово кольцо посажено вертикальной цапфой в подшипниках корпуса прибора ВГ-1 А.
Вертикальный двигатель ДВВ (он же датчик моментов ДМВ) через редуктор связан с вертикальным кардановым кольцом и поворачивает его относительно оси, перпендикулярной палубе судна. Таким образом, гироблоку обеспечивается три степени свободы.
Двигатель ДВВ отрабатывает сигнал рассогласования в азимуте, возникающий при изменении курса. Одновременно через зубчатую передачу он поворачивает синусно-косинусный вращающийся трансформатор 13 СКВТД, являющийся датчиком курса. От него информация о курсе поступает в прибор ВГ-ЗА для дальнейшей обработки.
Для придания гироблоку устойчивости в плоскости горизонта его центр тяжести смещен вниз, а для гашения свободного раскачивания на установочном кольце имеется жидкостный демпфер (не путать указанные конструктивные решения со способами превращения гироскопа в гирокомпас в приборах типа «Курс» и «Амур»).
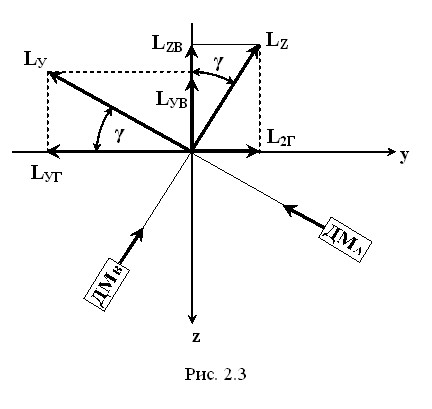
Из рассмотренного устройства гиросекции следует, что датчики моментов жестко связанны с вертикальным кардановым кольцом, которое перпендикулярно палубе. Это означает, что при кренах и дифферентах судна датчики моментов вместе с кольцом наклоняются на угол, а гироблок, благодаря маятниковости, остается в горизонтальном положении. Таким образом, торсионы останутся в прежнем горизонтальном положении, а оси вращения датчиков моментов рассогласуются с ними.
Данное состояние показано на рис. 2.3. Торсионы расположены соответственно по осям у и z, а оси вращения отклонены от этих осей на угол. В результате азимутальный датчик моментов ДМА создает крутящий момент не только по оси у, но и по оси z, а вертикальный ДМВ - не только но оси z, но и по оси у. Возникает перекрестное взаимовлияние датчиков моментов. При этом особенно значительно влияние ДМА на вертикальные торсионы, так как моменты, которые он создает, приблизительно в 22 раза больше моментов от ДМВ. При наклоне вертикального кольца (т.е. при статическом крене или дифференте) в 7-9° прибор теряет работоспособность. Из рис. 2.3 видно:
LУ = -LУГ+LZГ = -LУ cos +LZ sin ;
LZ = LУВ+L ZВ = LУ cos +LZ cos
Из выражений следует, что для устранения перекрестных связей необходимо исключить составляющие LУВ = LУ siny и LZГ = LZ sin. Особенно важно устранить первую из них из-за ее значительности.
Для этой цели служит преобразователь координат ПТ-001 (рис. 1.1), в качестве которого используется синусно-косинусный вращающийся трансформатор (СКВТ) 14, установленный с южной стороны гироблока. На обмотку ротора ПТ-001 подается сигнал с азимутальных обмоток ДДУ. Статор ПТ закреплен в горизонтальном кардановом кольце и наклоняется с ним на угол при крене и дифференте судна. Ротор ПТ связан с установочным кольцом, которое остается в горизонтальном положении. Это приводит к возникновению в статорной обмотке сигнала sin.который подастся в вертикальный канал управления (усилитель УА и ДМВ). Таким образом, в значительной степени исключается взаимовлияние следящих систем, что обеспечивает их устойчивую работу как при статических кренах и дифферентах, так и при качке. Следует подчеркнуть, что наличие ПТ обеспечивает устойчивую работу прибора, но не исключает девиацию при качке, вызванную силами инерции.
На основании гиросекции вокруг гироблока на трех стойках укреплены кольцевой обогреватель и два термореле. Одно из них управляет обогревателем, а второе включает цепь ревуна при превышении температуры внутри корпуса прибора ВГ-1А.
2.1.3.Индикатор горизонта
Индикатор горизонта предназначен для измерения угла наклона главной оси чувствительного элемента относительно плоскости горизонта и преобразования величины угла в пропорциональный электрический сигнал. Индикатор горизонта имеет маятник с упругим подвесом груза (рис. 2.4). Груз 1 подвешен к основанию 2 на плоских тонких пружинах 3. Такой подвес обеспечивает высокую чувствительность маятника вправо - влево (на рисунке), так как в этом направлении пружины легко изгибаются. Поскольку ширина пружин значительна, то в других направлениях маятник не перемещается.

Рис 2.4.
1 Груз; 2 Основание; Плоские пружины; 4 Упоры;
5 Сигнальная обмотка; 6 Обмотка возбуждения
Угол отклонения груза ограничен упорами 4 в пределах ±1°. Корпус ИГ заполнен жидкостью, вязкость которой обеспечивает полупериод колебаний маятника, равный 60 с. Эта величина является постоянной времени индикатора горизонта.
Примечание. Не рекомендуется переворачивать и наклонять ИГ на углы, превышающие 45°, так как подвес маятника может быть поврежден.
Ось чувствительности ИГ параллельна главной оси гироскопа. При отклонении последнего от плоскости горизонта вместе с ним отклоняется следящая сфера, а значит, и корпус ИГ. Груз стремится остаться в вертикальном положении. Возникает относительное смещение груза и основания ИГ. Это смещение измеряется и преобразуется в электрический сигнал с помощью дифференциального датчика перемещений. Его сигнальные обмотки 5 расположены на грузе и являются подвижной частью датчика. Неподвижная часть - обмотка возбуждения 6 крепится к основанию индикатора горизонта.
В нейтральном положении обмотка возбуждения наводит равные ЭДС в сигнальных обмотках. Эти ЭДС взаимно компенсируются, и выходной сигнал равен нулю. При смещении груза смещаются и сигнальные обмотки относительно обмоток возбуждения. В них наводятся уже разные ЭДС, а результирующий сигнал пропорционален смещению груза и является выходным сигналом ИГ. При этом фазовый сдвиг сигнала зависит от стороны смещения груза.
2.1.4. Корпус прибора ВГ-1А
Корпус основного прибора состоит из основания и съемного сферического колпака.
На передней панели корпуса размещены органы управления: переключатель на два положения - «Подготовка» (используется при пуске прибора) и «Работа» (обеспечивает рабочий режим); ручка «Скорость приведения» - для ускоренного приведения ЧЭ в меридиан. В нишах правой боковой стенки корпуса установлены: в первой (меньшей) резистор «Поправка», с помощью которого устраняется постоянная поправка в режиме ГК, резистор «Дрейф», используемый в режиме ГА; во второй нише - усилитель УГ горизонтального канала следящей системы. В нишах левой боковой стенки находятся усилитель УВ вертикального канала следящей системы и нерегулируемые элементы схемы.
Корпус прибора закрыт сферическим колпаком, верхняя часть которого прозрачна и изготовлена из органического стекла. Под ним с помощью системы терморегулирования поддерживается температура около +50°С. При такой температуре снижается нагрузка на систему подогрева жидкости чувствительного элемента.
На горизонтальной панели корпуса перед колпаком расположены световые табло с надписями «Пуск», «Подготовка», «Гирокомпас», «Гироазимут». Корпус крепится к основанию, относительно которого он может разворачиваться на ±5°, что необходимо для точной установки прибора ВГ-1А и диаметральной плоскости судна. Для этой цели ниже передней панели имеется специальная шкала.
2.2. Прибор питания ВГ-2А
Прибор предназначен для включения гирокурсоуказателя, формирования питающих напряжений, защиты основных цепей и контроля электрической схемы.
В нижней части корпуса прибора установлены кнопки «Пуск» (черная) и «Стоп» (красная), а также переключатель «Контроль». Выше него на крышке находится вольтметр, который подключается при контроле напряжения в фазах.
В верхней части крышки имеются окно для наблюдения за счетчиком времени наработки гирокурсоуказателя и три световых табло: «Система», «Агрегат», «50 Гц 110В». Внутри прибора размещены различные электроэлементы (см. лаб. раб. 3), а также реле времени, благодаря которому выдерживается программа запуска ГКУ.
В состав схемы питания входит также агрегат АМГ-202 (АМГ-200), преобразующий трехфазный ток 380/220 В, 50 Гц в трехфазный ток 120 В, 500 Гц. На судах, имеющих бортовую сеть постоянного тока, применяется агрегат АПМ-300 ВМ.
2.3. Прибор ВГ-ЗА (штурманский пульт)
На нижней части корпуса прибора установлены: переключатель режимов работы на два положения («ГА» и «ГК); рукоятки установки широты места «» и скорости «V» судна, резистор для регулировки яркости ламп подсветки.
На крышке прибора имеются окна, под которыми находятся шкалы курса, скорости и широты, а также четыре табло с надписями «Гироазимут», «Гирокомпас», «Подготовка», «Перегрев».
Внутри прибора размещен ревун, предназначенный для подачи звукового сигнала при перегреве гироблока или при отключении питания гиромотора; расшифровывающая следящая система трансляции курса с вычислительными устройствами схемы коррекции ПСУ; резисторы «sin», «VN», «tg», позволяющие регулировать корректирующие моменты.
2.4. Прибор 23-Т (курсограф)
Лентопротяжный механизм курсографа протягивает теплочувствительную бумагу, запись курса на которой осуществляется термоэлектрическими перьями. Одно из них (слева) указывает четверть, в которой располагается курс судна, второе - численное значение курса в данной четверти в градусах. Приводом лентопротяжного механизма являются механические часы. Они заводятся вручную 1 раз в четверо суток.
Перемещение курсового пера осуществляет кулачковый механизм. При изменении курса судна сельсин-приемник поворачивает кулачок, который через рычаг передает движение курсовому перу. Для повышения качества записи предусмотрена регулировка токов, протекающих в перьях.
Примечание. Остальные периферийные приборы те же, что и в системах курсоуказания «Курс-4» и «Амур».
Форма отчета по лабораторной работе представлена в приложении.
Список литературы
- Логинов К.В. Электронавигационные и рыбопоисковые приборы. - М.: Легкая и пищевая промышленность, 1983.
- Воронов В.В., Перфильев В.К., Яловенко А.В. Технические средства судовождения. Конструкция и эксплуатация. - М.: Транспорт, 1988.
- Коган В.М., Чичинадзе М.В. Судовой гироазимуткомпас «Вега». - М.: Транспорт, 1983. 20
Лабораторная работа 3
Функциональная схема
Учебная цель: изучить принцип действия гироазимуткомпаса по функциональной схеме. Научиться анализировать работу ГКУ в исправном состоянии.
Лабораторная установка - действующий комплект гирокурсоуказателя «Вега».
3.1. Особенности схемы питания
Одним из достоинств гирокурсоуказателя «Вега» является возможность его использования как в составе навигационного комплекса, так и самостоятельно. Наличие питающего напряжения частотой 500 Гц позволяет сопрягать ГКУ с системами навигационных комплексов и приборами современной судовой автоматики. В состав ГКУ входит репитерная система гирокомпасов прежних выпусков. Для ее питания предусмотрен переменный ток 110 В, 50 Гц, что дает возможность сопрягать гирокурсоуказатель с приборами более ранних годов выпуска.
При нажатии кнопки «Пуск» однофазный ток 110 В, 50 Гц поступает на трансформатор Тр5, а с него - на сельсин-датчик репитерной системы; после преобразования - на обогрев корпуса и ревун; на реле РП, которое замыкает контакты магнитного пускателя ПМТ-1111, обеспечивая подачу питания oт судовой сети трехфазного тока 380 (220) В, 50 Гц на агрегат питания АМГ-202. Переключатель режимов работы прибора ВГ-1A должен находиться в положении «Подготовка», так как запуск прибора возможен только при соблюдении условий, создаваемых в этом режиме. При отсутствии трехфазного тока срабатывает ревун, оповещая оператора, что запуск невозможен.
Агрегат питания вырабатывает напряжение 120 В, 50 Гц, которое поступает на обогрев гироблока (ТПГ) и сельсин-датчик ССД (рис. 1.1), служащий для связи с системами навигационного комплекса. Это же напряжение поступает на три трансформатора по фазам, где оно понижается до 40 В. Трехфазный ток 40 В, 500 Гц питает гиромотор, следящую систему и индикатор горизонта. При запуске прибора на гиромотор вначале подаются только две фазы. В этом случае вращательный момент недостаточен и гиромотор не запускается. Две его обмотки, находясь под напряжением, нагреваются, что способствует более быстрому и равномерному разогреву жидкости в ТПГ. Когда гироблок прогреется до рабочей температуры, срабатывает термореле и подключает к обмоткам гиромотора третью фазу.
Время разгона гиромотора у каждого комплекта ГКУ индивидуальное и колеблется в пределах 7-10 мин. На этот промежуток настраивается находящееся в приборе ВГ-2А реле времени. После разгона гиромотора оно включает следящую систему и индикатор горизонта. Начинается горизонтирование ТПГ и приведение его в меридиан. Так схема автоматически выполняет начальную часть программы запуска ПСУ.
3.2. Схема основного прибора
На рис. 1.1 показана гиросфера 1. погруженная в поддерживающую жидкость 3 и заключенная в следящую сферу 2. Слежение за гиросферой осуществляется следующим образом. Пока к гиросфере не приложены управляющие моменты, она в режиме свободного гироскопа вследствие вращения Земли уходит из первоначального положения. Следящая сфера связана с судном и остается на месте. Таким образом возникает механическое рассогласование гиросферы со следящей сферой. Поскольку в горизонтной системе координат гиросфера движется в азимуте и по высоте, то слежение за ней производится по этим двум каналам. Рассмотрим их работу раздельно.
Разделение сигналов происходит с помощью двухкоординатного датчика угла (ДДУ). Его статоры находятся на гиросфере с ее противоположных сторон в направлении оси х, а роторы - на следящей сфере напротив статоров. При уходе гиросферы в азимуте статор смещается к одной из обмоток II ротора (рис. 2.2), с которых снимается сигнал рассогласования. После усиления в усилителе УА (рис. 1.1) этот сигнал поступает на вертикальный двигатель 12. Последний разворачивает следящую сферу в азимуте до исчезновения сигнала рассогласования.
При движении ЧЭ по высоте статор ДДУ перемещается между роторными обмотками 1 (рис. 2.2), в которых наводится сигнал рассогласования по высоте. Он поступает на усилитель УГ (рис. 1.1) и двигатель 11, который поворачивает следящую сферу вокруг оси у по высоте до исчезновения сигнала.
При изменении курса и на качке следящая сфера, связанная с судном, увлекается им, а ЧЭ остается на месте. Следовательно, происходит их рассогласование, которое по соответствующим каналам отрабатывается так же, как выше рассмотрено.
Для создания управляющих моментов (маятникового и демпфирующего) необходима связь гироскопа с Землей. Эта связь обеспечивается индикатором горизонта. С подъемом или опусканием главной оси гиросферы происходит отклонение груза ИГ и в его сигнальных обмотках возникает сигнал, который поступает в оба канала следящей системы. Напомним, что до введения в схему индикатора горизонта следящая сфера была согласована с гиросферой. С поступлением сигнала ИГ на двигатель 11 последний начинает его отрабатывать, разворачивая следящую сферу вокруг оси у. Поскольку гиросфера при этом остается на месте, то происходит закручивание горизонтальных торсионов. Таким образом создается момент по оси у, вызывающий прецессию ЧЭ в азимуте. Данный момент является маятниковым, а двигатель 11 ДВГ играет роль азимутального датчика моментов ДМА. Азимутальный датчик моментов принудительно рассогласовал следящую сферу с гиросферой по высоте, следовательно, с обмоток I ротора ДДУ снимается сигнал рассогласования, который компенсирует сигнал ИГ. Двигатель останавливается, а торсионы оказываются закрученными на угол, пропорциональный углу смещения груза ИГ, то есть пропорционально углу отклонения главной оси гиросферы от плоскости горизонта. Таким образом создается длительно действующий маятниковый момент.
Аналогичное действие индикатор горизонта оказывает на вертикальный канал управления. Его сигнал после усиления в усилителе УА поступает на вертикальный двигатель 12 ДВВ, который разворачивает следящую сферу вокруг оси z. Так как гиросфера при этом остается на месте, то происходит закручивание вертикальных торсионов. Так создается демпфирующий момент. Трехстепенной гироскоп превратен в гирокомпас. Ему присущи погрешности гирокомпаса с непосредственным управлением (скоростная, инерционная) и, кроме того, погрешность затухания, или широтная. Схема выработки сигналов коррекции, которые позволяют исключить скоростную и широтную погрешности, сосредоточены в приборе ВГ-3А.
3.3.Трансляции курса. Принцип работы схемы коррекции
При изменении курса судна гиросфера (рис. 1.1) остается в меридиане, а следящая сфера начинает поворачиваться вместе с судном. В результате происходит их рассогласование в азимуте и возникает сигнал на обмотках 4 ДДУ, который после усиления в усилителе УА поступает па вертикальный двигатель 12, возвращающий следящую сферу в согласованное положение с гиросферой. При этом двигатель поворачивает ротор вращающегося трансформатора СКВТД 13, который является датчиком курса. Его роторные обмотки (синусная и косинусная) накоротко замкнуты со статорными обмотками СКВТП - приемника курса, который находится в приборе ВГ-3А и работает в трансформаторном режиме, то есть в начальный момент времени остается на месте. В результате и цепи замкнутых обмоток текут уравнительные токи, наводящие ЭДС в синусной обмотке ротора СКВТП. Данный сигнал поступает в усилитель УК, а затем на исполнительный двигатель ИД. Двигатель вращает ротор СКВТП до исчезновения сигнала. Так происходит трансляция курса из основного прибора ВГ-1А в штурманский пулы - прибор ВГ-3А, Одновременно вращение двигателя передается датчикам курса, роль которых выполняют сельсины СКД и ССД, для трансляции потребителям истинного курса (ИК). В репитерах курс принимается сельсинами-приемниками.
Кроме того, значение истинного курса необходимо для выработки сигналов коррекции. Для этого двигатель разворачивает на угол, равный истинному курсу, ротор еще одной электрической машины – СКВТV, с синусной и косинусной обмоток которой снимаются напряжения, пропорциональные составляющим скорости судна соответственно по параллели VЕ = V sin ИК и меридиану – VN = V cos ИК. Напряжение, пропорциональное V, питает обмотку возбуждения СКВТV. Данное напряжение вырабатывается линейным вращающимся трансформатором СКВТV, в который скорость либо поступает от лага, либо вводится вручную ручкой «V». Сигнал с косинусной обмотки СКВТу, отмасштабированный до уровня VN/R (R - радиус Земли), поступает в канал вертикального управления гиросферой для исключения скоростной девиации.
Для формирования корректирующего сигнала в азимуте необходим узел широты, в котором имеются шкала широты «» и две электрические машины: СКВТ и ЛBT. Широта вводится ручкой «», с помощью которой роторы обеих машин разворачиваются на соответствующий угол. Обмотка возбуждения первой из них питается напряжением, пропорциональным, и с ее синусной обмотки снимается сигнал, определяемый выражением sin. Он обеспечивает широтную коррекцию ГКУ на неподвижном основании. С выхода CКBTV снимается сигнал VE/R и подается на обмотку возбуждения ЛВT. Его выходное напряжение будет:
U ~ (VE /R) tg.
Сигналы СКВТ и ЛBT.складываются, и их сумма, пропорциональная корректирующему моменту LКУ = Нsin (VE /R) tg, идет в азимутальный канал на датчик моментов, который закручивает торсионы на дополнительный угол, обеспечивая широтную коррекцию гиросферы как на неподвижном, так и подвижном основании.
В режиме ГА индикатор горизонта отключается от азимутального канала (переключатель ГК - ГА), то есть маятниковый момент к ЧЭ не прикладывается. Удерживает гиросферу в азимуте момент LKУ, сформированный, как указано выше.
Инструментальные погрешности изготовления гироблока (неточная выставка торсионов, дебаланс гиросферы и т. д.) и снижение со временем точности выработки корректирующих моментов приводят к появлению постоянной поправки гирокомпаса и азимутального дрейфа гироазимута. Для их компенсации имеются соответствующие резисторы: в вертикальном канале резистор «Поправка», в горизонтальном - резистор «Дрейф». С их помощью регулируют корректирующие моменты в процессе настройки прибора.
Форма отчета по лабораторной работе представлена в приложении.
Список литературы
- Логинов КВ. Электронавигационные и рыбопоисковые приборы. - М.: Легкая и пищевая промышленность, 1983
- Воронов В.В., Перфильев В.К., Яловенко А.В. Технические средства судовождения. Конструкция и эксплуатация. - М: Транспорт, 1988.
- Коган В.М., Чичинадзе М.В. Судовой гироазимуткомпас «Вега». - М.: Транспорт, 1983.
Лабораторная работа 4
Техническая эксплуатация и навигационное использование
Учебная цель: изучить вопросы технической эксплуатации и навигационного использования ГКУ «Вега». На основе теоретических знаний произвести анализ проверок и регулировок прибора в режимах запуска, ГА и ГК.
Лабораторная установка - действующий комплект гирокурсоуказателя «Вега».
4.1. Меры безопасности
Необходимым условием безаварийной работы гирокурсоуказателя является строгое соблюдение правил обслуживания, изложенных в инструкции по эксплуатации. К обслуживанию прибора допускаются лица, изучившие эксплуатационную документацию ГКУ, знающие его устройство и принцип работы, а также правила техники безопасности.
Обслуживающему персоналу запрещается:
- включать ГАК при открытых крышках приборов;
- открывать крышки приборов и производить замену вышедших из строя электроэлементов схемы при включенном гирокурсоуказателе, кроме особых случаев, оговоренных в инструкции по эксплуатации;
- устанавливать нештатные предохранители.
4.2. Подготовка к пуску
Перед включением приборов ГКУ производится внешний осмотр, проверяется надежность соединения штепсельных разъемов, целостность монтажа, плавность вращения кинематических линий. Обнаруженные неисправности необходимо устранить; пыль, влагу, грязную смазку удалить. Проверить на распределительном щите питающие напряжения 3-50 Гц 220/380 В и 50 Гц 110 В. Допустимые отклонения ±10%. Органы управления устанавливаются в исходное положение, указанное в табл. 4.1.
Проверка гироблока и гиросекции:
- открыв колпак прибора ВГ-1А, убедиться, что пузырек уровня на установочном кольце отклонен не более чем на одно деление;
- удерживая горизонтальное кольцо в горизонтальном положении, отклонить установочное кольцо с гироблоком на 20° и отпустить его. Гироблок должен вернуться в исходное положение с точностью 1-1,5 деления уровня. В противном случае гироблок необходимо заменить;
- убедиться в наличии зазора между монтажными проводами и вертикальным кардановым кольцом, для чего провернуть его вокруг вертикали на 360°.
Таблица 4.1
| Прибор | Переключатель и шкалы | Исходное положение |
| ВГ-1А | Переключатель режимов Рукоятка "Скорость приведения" | "Подготовка" Среднее |
| ВГ-2А | Переключатель "Контроль" | Отключен |
| ВГ-3А | Переключатель "Режим" Переключатель "Следящая система" Шкала "Широта" Шкала "Скорость" | ГК "Следящая система" Широта места Нулевое |
| 23Т | Рычаг часового привода Шкала курса, перья на ленте Переключатель "Приемник курса" | "Стоп" Согласованы с отсчетом курса прибора ВГ-3А "Вкл" |
| Репитеры | Шкалы курса | Согласованы с отсчетом курса прибора ВГ-3А |
4.3. Включение ГКУ
Подать питание с распредщита 3 ~ 50 Гц 220/380 В и 50 Гц 110 В, при этом начинает работать ревун в приборе ВГ-3А.
Нажать кнопку «Пуск» прибора ВГ-2А. При этом выключается ревун и загораются табло: на приборе ВГ-1А - «Пуск», «Подготовка»; на приборе ВГ-2А - «50 Гц 110 В», «Агрегат», «Система»; на приборе ВГ-ЗА - «Подготовка». Если какое-то табло не загорелось, ГАК необходимо выключить. Неисправность может привести к сгоранию обмоток гиромотора при длительном питании только от двух фаз.
Проверить напряжение с помощью переключателя «Контроль» и вольтметра прибора ВГ-2А. Напряжение во всех трех фазах должно быть 40±4 В. При этом надо убедиться, что вращение вала АМГ-202 происходит в направлении, указанном стрелкой.
Запустить часовой привод лентопротяжного механизма курсографа, отрегулировать нагрев перьев.
Через 10-15 мин после включения (после прогрева гироблока) срабатывает реле времени и начинается разгон гиромотора.
Приблизительно через 20 мин после включения должно погаснуть табло «Пуск». В это время включается азимутальный и вертикальный двигатели, что можно определить по характерному рывку шкалы прибора ВГ-1А, и начинается ускоренное горизонтирование чувствительного элемента автоматически. Это значит, что можно приступить к ускоренному приведению ГАК в меридиан. Истинный курс судна должен быть известен заранее. Ручкой «Скорость приведения» показания прибора ВГ-1А приводят к отсчету истинного курса. После возвращения рукоятки «Скорость приведения» в нулевое положение вновь начинается ускоренное горизонтирование, во время которого показания шкал могут меняться в пределах 2-3°. Через 10 мин, то есть к концу горизонтирования, показания шкал должны соответствовать ранее установленному курсу в пределах 1-2°. По окончании горизонтирования переключатель режимов необходимо установить в положение «Работа». Это делается не ранее чем через 10 мин после ускоренного приведения гироблока в меридиан. При этом на приборах ВГ-1А и ВГ-3А гаснет табло «Подготовка» и загорается табло «Гирокомпас».
ГАК можно не приводить ускоренно, если его отклонение от меридиана не превышает 3°, или при любом отклонении, если до выхода судна в море осталось более 6 часов. В этих случаях перевод ГАК в режим «Работа» производится также не ранее чем через 10 мин после погасания табло «Пуск».
Для контроля прихода ГАК в меридиан в течение часа с интервалом 10-15 мин пеленгуют любой отдаленный предмет. Гирокомпас считается в меридиане, если пеленги не отличаются друг от друга более чем на 0,5°.
При необходимости в море можно выходить сразу же после включения режима «Подготовка». Гирокомпас в течение 1-2 часов все равно придет в меридиан при точности показаний в это время ±3°.
После запуска ГАК необходимо согласовать шкалы репитеров, курсографа и внешних принимающих курса. Так как трансляция курса производится с прибора ВГ-3А, который автоматически согласуется с основным прибором, то для удобства согласования репитеров рекомендуется отключить тумблер «Следящая система». По окончании согласования включить его.
4.4. Обслуживание ГКУ в море
Перед выходом в море необходимо шкалу «» широты установить на отсчет, равный широте места, шкалу «Скорость» выставить на ноль. Включить лаг и проверить работу его трансляционного прибора, для чего подключить переносный вольтметр к клеммам микровыключателя под шкалой «V» и убедиться в наличии на них сигнала. При изменении показаний лага сигнал на клеммах должен меняться. Шкала «Скорость» показаний лага не отрабатывает. При работе от лага сигнал скорости подается на квадратурную обмотку СКВТV, которая передает его как обычный трансформатор. Ручной же ввод осуществляется разворотом ротора данного СКВТ, при этом лаг автоматически отключается от ГКУ. Таким образом, на формирование корректирующих моментов ГКУ поступает напряжение, пропорциональное неточному значению скорости. Если лаг не работает, то скорость вводится вручную не позднее чем через 2 мин после маневра, с точностью ±1,5 уз в высоких широтах и +3 уз в средних широтах. Широту нужно вводить в средних широтах через 2-3°, в высоких - через 0,5°.
Во время работы ГАК необходимо постоянно следить за световой и звуковой сигнализацией. Включение ревуна свидетельствует о пропадании трехфазного питания. Отключение всех табло при отсутствии звука ревуна говорит о пропадании судового питания. В обоих случаях нужно немедленно перейти на управление судном по магнитному компасу.
Пропадание питания на время менее 5 с не должно нарушать работу ГКУ. Если питание возобновится более чем через 5 с, то ГКУ останется выключенным и заработает ревун.
При перегреве основного прибора включаются ревун и табло «Перегрев». В этом случае, не выключая прибора, надо отключить обогреватель, вынув предохранитель «Обогрев корпуса» в приборе ВГ-2А. После чего устранить неисправность и включить предохранитель. Если неисправность устранить не удалось, то обогреватель остается выключенным, однако точность показаний ГАК при этом снизится. При исправной работе не рекомендуется без необходимости открывать колпак и боковые крышки прибора ВГ-1А, чтобы не нарушать тепловой режим.
Режим ГА целесообразно использовать при скоростях более 50 уз или при интенсивном маневрировании судна. Перевод гирокурсоуказателя в режим ГА производится переключателем «Режим» прибора ВГ-3А. При этом гаснет табло «Гирокомпас» и загорается табло «Гироазимут». Такое переключение можно сделать и из положения «Подготовка». В этом режиме происходит азимутальный дрейф ЧЭ, поэтому поправку ГА необходимо определять через каждый час и учитывать ее при ведении счисления. В соответствии с требованиями РШС-89 не реже одною раза в сутки определяется поправка в режиме ГК и проверяется согласование репитеров.
Проверка согласования курсографа по времени производится перед выходом судна из порта и при входе в него, а также при приеме вахты, о чем делается отметка на ленте.
4.5. Выключение ГКУ
Для выключения ГКУ необходимо установить переключатель режимов в положение «Подготовка», нажать кнопку «Стоп» и держать ее в таком положении более 5 с до включения ревуна. Можно также, не нажимая кнопку «Стоп», выключить питание непосредственно с распредщита. Тогда ревун не включится. Затем снять питание с распредщита. Курс ошвартованного судна нужно записать, чтобы при следующем включении прибора знать направление меридиана.
Следует избегать выключения ГКУ в море на ходу судна, особенно в условиях качки, так как это может привести не только к нарушению регулировки гироблока, но и к полному выходу его из строя. Причина в том, что при снятии питания следящие системы отключаются сразу, а гироскоп длительное время вращается, то есть сохраняет кинетический момент, оставаясь неуправляемым. При качке и рыскании возникает беспорядочная прецессия и возможно закручивание торсионов на углы свыше предельных значений.
При случайном выключении прибора в море нужно, удерживая вручную гироблок в горизонтальном положении, переключатель режимов поставить в положение «Подготовка» и включить ГКУ кнопкой «Пуск». После погасания табло «Пуск» по сличению с магнитным компасом ускоренно привести ЧЭ в меридиан, спустя 10 мин включить режим ГА, а еще через 20 мин режим ГК.
4.6. Проверки и регулировки ГКУ
Проверки и регулировки ГАК «Вега», а также периодичность их выполнения указаны в табл. 4.2.
Таблица 4.2
| Проверяемый параметр | Периодичность |
| Согласованность курсовых шкал | Один раз в сутки и во время каждого пуска |
| Заводка часового механизма курсографа | Один раз в 4 сучок |
| Напряжение схемы питания и контроль токов ТПГ | Один раз в неделю и во время каждого пуска |
| Погрешность в режиме ГК | Один раз в 3 месяца |
| Скорость ухода в режиме ГА | Один раз в 3 месяца |
| Погрешность трансляции курса | Один раз в 3 месяца |
| Погрешность выработки скоростной поправки | Один раз в 6 месяцев |
| Выставка пеленгаторных репитеров в ДП | Один раз в 6 месяцев |
| Сопротивление изоляции | Перед каждым пуском, но не реже одного раза в 6 мес. |